
多体分离动力学研究进展
2022-10-12 11:41宋威艾邦成
航空学报 2022年9期
宋威,艾邦成
中国航天空气动力技术研究院,北京 100074
多体分离动力学(Multibody Separation Dynamics, MBSD)是航空航天和武器领域的多体飞行器分离系统中经常存在的一类重要运动动力学问题。几种典型的多体飞行器系统包括: ① 飞 机-存储物(Aircraft Store, AS),该存储物可以是外挂或内埋式武器、副油箱、座舱盖和飞机座椅,无人机、运载火箭等;② 多级飞行器(Multistage Vehicles, MSV),如串联或并联式多级运载火箭、串联或并联两级入轨空天飞行器、助飞鱼雷等; ③ 带整流罩飞行器; ④ 多弹头飞行器等。
多体分离动力学具有不同于多体系统动力学(一般是指研究多柔体或刚体系统相互连接时的运动规律)的特征,多体飞行器在解锁分离后不再互相约束或接触,多体飞行器间存在空气介质的相互作用。多体分离过程中存在多体间的相互流场干扰效应,流场干扰会影响着多体飞行器的空气动力学特性(多体空气动力学),多体空气动力学特性进而会影响着多体间分离动力学特性,多体间分离动力学特性又反过来影响着流场。尤其是多体飞行器在高速飞行状态下进行分离时,尚存在多体飞行器激波相互反射与干扰、激波与边界层干扰、边界层分离与再附等复杂的流场特性,对作用在分离体上的气动力和力矩产生较大影响。因此,多体飞行器分离过程的流体运动和刚体、柔性体运动相互耦合效应成为多体分离动力学的关键科学问题。
多体分离动力学是空气动力学和飞行动力学的高度结合点,多体间的空气动力学是多体分离动力学模拟的基础,多体空气动力学的准确预测和评估是多体分离动力学问题的主要技术难点。这主要是由于分离体所处运载体扰动流场区域的位置和姿态是变化的,不能像研究静态空气动力学问题那样,将分离体固定在干扰流场的某个位置进行数值模拟或风洞试验给出干扰气动力,这就需要给出载机流场干扰全区域的气动力数据库,从而可利用气动力数据库耦合刚体运动方程来预测与评估分离体的动力学特性。有的学者通过风洞试验测量或数值模拟分离体在不同位置和姿态下的干扰气动力,进而来预测与评估多体分离的动力学特性,如经典网格测量法(Grid Survey Method, GSM)。
本文针对多体飞行器分离系统的研究需求,对多体分离动力学问题的研究进展进行总结和阐述,以期能为未来研究多体飞行器的分离动力学问题指出方向和思路。第1节主要对几种典型的多体飞行器分离问题和主要特点进行介绍和总结;第2节主要概括和论述了多体分离动力学的间接预测方法(基于理论分析、数值模拟和风洞试验的动力学建模和仿真方法);第3节主要论述对多体分离动力学的直接数值预测和风洞试验方法及其研究进展;最后给出作者的几点看法和研究展望。
1 典型多体飞行器分离及主要特点
1.1 飞机-存储物
飞机-存储物是指安装在飞机悬挂/投放装置上的任何存储物,存储物会在一定的时刻从载机上发射/释放出去,这个多体分离过程一般被称为飞机-存储物分离(Aircraft Store Separation, ASS)。根据存储物与载机的安装位置,可主要分为4类: ① 外挂物分离(External Store Separation, ESS),指将存储物安装在载机机翼上或机身外部,如图1所示; ② 紧贴式分离(Tangential Store Separation, TSS),使分离体尽可能地靠近飞机外表面; ③ 半埋式分离(Semisubmerged Store Separation, SSS),指将分离体设置在轮廓与分离体特定外形相一致的浅槽内;④ 内埋物分离(Internal Store Separation, ISS),指将分离体全部安装在运载体内部,如F22、F35、J20等战斗机的内埋武器装载,如图2所示。

图1 机载外挂武器示意图[3]Fig.1 Schematic of external weapons[3]

图2 机载内埋武器示意图[4]Fig.2 Schematic of internal weapons[4]
1.2 多级飞行器
多级飞行器(Multistage Vehicles, MSV)主要有多级助推运载火箭、助推式高超声速飞行器、可重复使用两级入轨空天飞机等,多级飞行器在稠密大气层内飞行和分离时存在多级间流场干扰和相对运动。多级飞行器的分离过程被称为级间分离(Stage Separation, SS)。根据多级飞行器的气动外形和连接方式可分为: ① 串联级间分离(Tandem Stage Separation, TSS),如Hyper-X计划中的助推器与X-43飞行器的分离,如图3所示; ② 并联级间分离(Parallel Stage Separation, PSS),如背驮式两级入轨空天飞机,如图4所示。

图3 Hyper-X飞行器分离示意图[17]Fig.3 Schematic of Hyper-X vehicle separation[17]

图4 背驮式两级入轨空天飞行器示意图[18]Fig.4 Schematic of captive-on-top air-launched TSTO vehicle[18]
1.3 带整流罩飞行器
高速运载火箭、导弹等飞行器在飞行过程中通常采用整流罩来保护部件免受气动力/热环境的影响,或达到减阻的效果,当飞行器到一定高度和速度时需将整流罩抛离,这一过程称为整流罩分离或头罩分离(Fairing Separation, FS),如图5所示。随着高超声速飞行器的出现,将面临在较低飞行高度、较高飞行速度下的整流罩分离问题。然而,在稠密大气层内进行高速整流罩分离时,复杂的气动力将使头罩分离后的运动轨迹复杂,并可能与飞行器相撞,导致灾难性的后果。因此,准确模拟整流罩分离过程、分析并认识其中流场变化对分离方案设计、安全性评估以及弹体受扰动的影响有着重要参考。

图5 头罩分离示意图Fig.5 Schematic of fairing separation
1.4 多弹头飞行器
多弹头飞行器是指在母弹内部布置一定数量子弹(可以是集束炸弹、制导导弹等),并在预定抛射点开舱将子弹从母弹体内抛撒出去,形成有一定散布面积与密度效果的一类武器,这个抛撒过程称为子母弹抛撒分离(Cluster Munitions Dispense Separation, CMDS),图6所示为典型的分离过程。多弹头可分为集束式多弹头、分导式多弹头和机动式多弹头(也称为全导式多弹头)。抛撒过程是子母弹武器系统的关键环节,子母弹抛撒分离过程存在严重的子弹与母弹气动干扰,尤其是在超声速飞行条件下的子母弹分离,往往伴随着子弹与母弹间强烈激波/激波干扰,子弹与子弹间激波干扰,使得分离过程的流场结构异常复杂,可引起子弹及母弹气动力不确定性,进而影响到子母弹的分离及毁伤效果。因此,开展子母弹抛撒分离过程中流场特性、干扰气动特性研究对提高子母弹武器系统的作战效能至关重要。

图6 子母弹武器示意图[20]Fig.6 Schematic of cluster munitions dispense[20]
2 多体分离动力学的间接预测法及其进展
间接预测法(Indirect Prediction Method, IPM)是指采用相关模拟方法(如网格法,包括理论分析、数值模拟和风洞试验等)给出分离体在运载体扰动流场中不同位置和姿态下的干扰气动力数据库,代入分离体的六自由度运动方程(Six Degrees of Freedom Equation, 6DOF)进行数值仿真,该方法常被称为动力学建模与仿真(Dynamic Modeling and Simulation, DMS),DMS方法中的气动力一般是基于静态(定常)数值计算或风洞试验而获得的,难以准确地考虑分离体运动效应带来的非定常效应。
2.1 基于理论分析的DMS方法
基于理论分析的DMS方法的本质是多体间的空气动力学特性采用理论分析方法获得,将气动力代入飞行动力学方程进行仿真。理论分析的核心思想是建立简化的流动数学模型,并在一定的假设下,得到分离体上气动力的简化解。其主要特点是具有普遍性信息,由于作出大量的简化假设,理论模型只能反映事物的核心特征,对于复杂分离体的空气动力学问题,该方法常常会受到一定的限制。多体空气动力学的理论分析方法主要有细长体理论(Slender Body Theory, SBT)、面元法(Panel Method, PM)、涡格法(Vortex Lattice Method, VLM)和影响函数法(Influence Function Method, IFM)等。理论分析方法主要针对小扰动位势方程,针对Euler和N-S方程的求解则放在数值模拟章节上。
20世纪70年代,美国国家航空航天局建立了外挂物从机翼上分离仿真系统NEAR(SUB-STR),用估算研究外挂物的运动轨迹和姿态角变化,该仿真系统在计算外挂物的空气动力和力矩时采用细长体理论,由于细长体理论的应用,使计算方法得到大大简化,这必然限制该分离系统的应用范围,不能用于宽机身飞机(如轰炸机)、非细长体外挂物(如副油箱,面对称导弹等)等研究。另外,该系统没有考虑投放/发射冲击力和力矩的影响,只能进行外挂物自由投放模拟。20世纪70年代末, Dornier公司建立了一套外挂物分离特性数值仿真系统,该系统综合使用涡格法和细长体理论,求出飞机与外挂物干扰气动系数。载机的气动力采用涡格法估算,导弹的空气动力特性用细长体理论给出。20世纪80年代, MBB公司的Deslandes发展了一种用于飞机外挂物分离特性预测的仿真系统,该系统利用面元法生成飞机各部件及各部件间的相互干扰,外挂物外形也用面元法生成。该系统可研究多个外挂物同时投放的情况和飞机作机动飞行时外挂物投放/发射特性,还可以用来处理子母弹抛撒分离问题。1988年Cross也发展了一套外挂物分离特性仿真系统,该系统采用基本的源片和涡环(SPARV)面元方法计算飞机/挂架/外挂物外形的三维面元网格上的流动,非升力面采用源面元模拟,而升力面则采用组合的源/涡片面元模拟。1990年RAENEAR外挂物分离模拟系统也采用了涡格法。
2.2 基于数值模拟的DMS方法
基于数值模拟的DMS方法的本质是采用数值模拟方法求解Euler和N-S方程获得分离体在运载体干扰流场区域的定常干扰气动力数据,将气动力数据代入分离体的6DOF运动方程进行仿真。该方法比较常规,被国内外学者应用于飞机-存储物(如外挂物、座舱盖分离)、多级助推飞行器(如串联和并联级间分离)。动力学建模与仿真方法有很多,如牛顿力学法、拉格朗日法、ADAMS建模与仿真和约束力方法等,前3种方法比较常规,后一种方法是最新发展起来的,已经被用于求解两体甚至多体间相互运动模拟。如Pamadi等基于约束力方程(Constraint Force Equation, CFE)方法(图7)对并联飞行器级间分离动力学进行建模,并将采用数值模拟得到的气动力数据代入分离运动方程进行数值仿真,得到分离体的运动轨迹和姿态角等参数的变化规律。

图7 约束力方程建模方法示意图[39]Fig.7 Schematic of constraint force equation method[39]
2.3 基于网格测力的DMS方法
网格测量法如同静态测力实验方法一样,也通过天平测量模型的干扰气动力,但是网格测量需要测量分离体在运载体干扰流场中的不同位置和姿态角下的静态干扰气动力和力矩,形成静态气动力和力矩数据库,然后在计算机中建立分离体运动六自由度方程并求解,该方法不能直接在风洞中得到分离体的分离运动轨迹与姿态角,因此常称为“离线(Off-lines)”模拟法。网格测量法主要缺点有: ① 网格测量方法也是一种静态方法,不能反映阻尼效应; ② 干扰气动系数只适用于给定的运载体-分离体组合,不可以“外插”用于另一个运载体-分离体;③ 采集数据的位置和姿态的数量相当大,特别是对于不稳定的分离体或复杂的分离体携带外形(即多个分离体携带),时间长,成本昂贵。其最大优点是一套气动数据库可计算多个分离运动轨迹和姿态。随着技术的发展,Jamison将现代设计方法应用到网格测量实验中去,大大减小了实验的次数和成本。
网格增量系数方法是一种利用网格化数据库用于分离体分离运动轨迹和姿态预测的方法。使用这个方法时,由网格数据库和自由流数据库内插得到分离体上的气动力和力矩,该气动载荷通过联机求解轨迹运动方程计算出分离体的位置和姿态的函数。分离体的气动力系数和力矩系数是依据分离体在自由流中的系数和飞机干扰流场的增量来描述的,如图8所示。分离体在自由流中的系数是相对来流姿态的函数,而飞机干扰流场的增量是相对于飞机位置和姿态的函数。流场增量或增量系数定义为分离体在飞机流场中特定位置和方位的分离体的载荷系数与在同样攻角和侧滑角下自由流中相应的系数之差。网格增量系数法还具有在网格数据达不到的流场方位角处进行分离体载荷的一阶外插。图9显示了外挂物俯仰角外插的过程,在飞机流场中方位1处的增量系数被加到方位2处的自由流数据中,来预估在飞机流场中方位2处的分离体载荷。对于只有零方位角网格数据的情况,可以采用分离体载荷外插法来计算流场中所有非零方位角分离体的载荷。

图8 网格增量系数轨迹方法示意图[42]Fig.8 Schematic of grid delta-coefficient trajectory method[42]
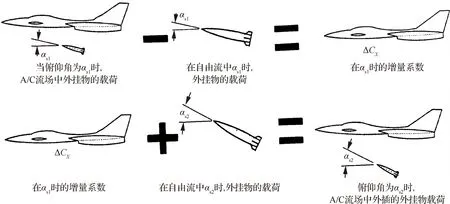
图9 网格增量系数外插图[42]Fig.9 Delta-coefficient extrapolation[42]
由于网格测量法所测量的分离体气动力和力矩具有可重复使用的特点,该方法被广泛地应用于多体分离动力学的模拟中,如存储物飞机-存储物(如外挂式武器、无人机、内埋式武器)、多级飞行器(如并联和串联级间分离)和多弹头飞行器。图10所示为多级助推并联飞行器在风洞中安装示意图和典型工况下的纹影显示图,从中可看到两级飞行器间存在强列的激波与激波干扰,该激波干扰会严重影响分离体的气动特性。
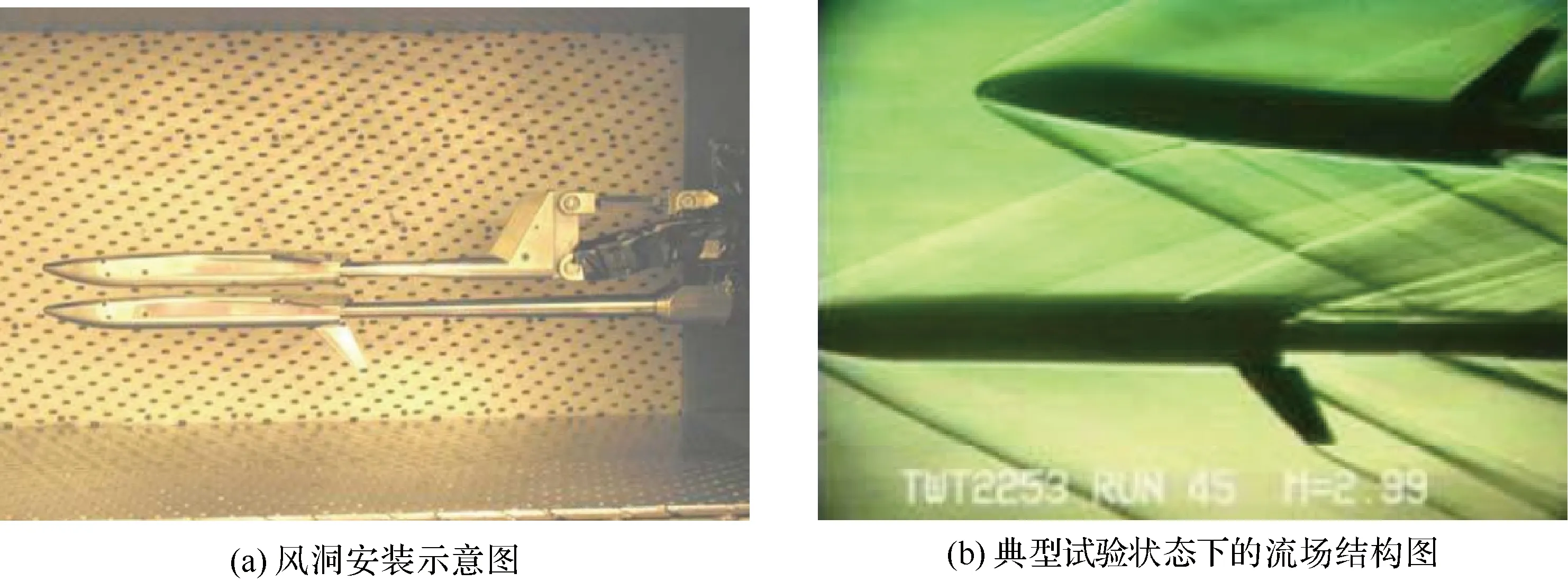
图10 多级并联助推飞行器布局[46]Fig.10 Layout of multi-stage parallel booster[46]
2.4 风洞试验和数值模拟相结合的预测方法
20世纪90 年代初,美国阿诺德工程发展中心(Arnold Engineering Development Center, AEDC)开发了一种CFD (Computational Fluid Dynamics)结合风洞测量的多体分离轨迹预测方法——流向角测量法。图11为AEDC 在4T 风洞中进行流向角测量试验时的照片。该方法在试验中不需要在流场中放置投放武器模型,只需要测量载机干扰下的流场参数,然后通过CFD 方法得到投放武器模型在载机干扰流场下的气动系数,最后通过流体动力学计算得到真实的机弹分离轨迹和姿态,因此该方法并不针对某个特定的投放武器,一旦测量出载机干扰流场的流动特性,便能通过CFD方法得到任意外形武器在任意初始分离条件下的机弹分离轨迹和姿态,因此该方法的适用性比CTS(Capture Trajectory System)及网格测量法都强,地空数据相关性差异因素更少,主要为支架干扰、洞壁干扰及CFD计算误差。

图11 AEDC 在4T 风洞中进行流向角测量试验[48]Fig.11 Flow-field angle measurement testing in AEDC 4T wind tunnel[48]
3 多体分离动力学的直接预测法及其进展
直接预测法(Direct Prediction Method, DPM)是指直接在风洞中(如捕获轨迹试验、投放试验和自由飞试验等)或采用计算流体力学耦合6DOF的计算方法(CFD-6DOF方法),N-S方程和6DOF方程的耦合求解主要有强耦合和弱耦合方法。由于6DOF方程同N-S方程具有较大差异,强耦合实现起来困难较大,因此,目前基本上采用弱耦合方法,首先,通过求解Euler/N-S方程得到某时刻的稳态干扰气动力;其次,通过求解飞行器刚体动力学方程和运动方程,得到分离体下一时刻的位置和姿态角;再次,通过动网格或嵌套网格方法,使空间网格适应外挂物新的位置和姿态,进入下一步气动力计算循环;最后,得到分离体投放后的动力学特性。
3.1 直接数值预测
3.1.1 CFD-6DOF方法
CFD-6DOF方法主要基于嵌套/重叠网格(图12)和动网格两种网格技术进行。前者是将复杂的流动区域分成几何边界比较简单的子区域,各子区域中的计算网格独立生成,彼此存在着重叠或嵌套关系,流场信息通过插值在重叠区边界进行匹配和耦合。对具有相对运动的复杂结构采用重叠网格非常便利,子域间的相对运动不需要网格变形,更不需要重新生成网格,只需要在子域定义其运动规律且子域间有相互重叠。此类方法为国外常用的运动问题求解算法,相对成熟。其缺点是频繁的插值运算会带来解的精度损失。依据网格类型可分为结构、非结构和混合网格嵌套/重叠网格等。后者主要基于非结构网格或笛卡儿网格的一类方法,对于多体分离相对运动问题,动网格实现方式主要有网格变形法和局部重构法。其中网格变形法主要有弹簧近似法、弹性体方法两种。笛卡尔网格避免了对壁面区域的特殊处理,网格自适应相对容易,常用于多体分离问题。此外,近年来国外还出现了采用无网格技术对多体分离问题求解的方法,但该方法应用还不广泛。

图12 嵌套/重叠网格示意图[54]Fig.12 Schematic of overlapping/overset grid[54]
3.1.2 Euler-6DOF方法
飞机-存储物分离问题是最主要的一类多体分离问题,是最先受到重视的研究领域。基于嵌套/重叠网格技术的Euler-6DOF方法被广泛地应用于处理飞机-存储物(如外挂武器、副油箱、座椅弹射)的投放分离问题。20世纪90年代,Lijewski和Suhs基于重叠网格技术耦合求解Euler流动运动方程和6DOF运动方程,对机翼-挂架-外挂物(Wing-Pylon-Finned-Store, WPFS,见图13)投放分离进行了数值模拟研究,得到外挂物的气动和运动数据,并与风洞CTS试验结果进行对比,结果吻合较好(图14)。WPFS模型是美国公布的研究外挂物投放分离问题的标模,该外挂物标模有完整的气动力和力矩、分离运动轨迹和姿态角、机翼/挂架及外挂物压力分布等实验数据,被国内外研究者用于各种CFD算法、计算格式的验证。1999年Prewitt等基于重叠网格技术,采用Euler-6DOF方法数值模拟了跨声速条件下WPFS外挂物投放问题,并与风洞CTS试验结果进行了对比,结果验证了算法的正确性,Prewitt等在此基础上同时对多个外挂物的投放问题进行了数值模拟研究,如图15所示。

图13 机翼-挂架-外挂物标模示意图[57]Fig.13 Schematic of WPFS[57]

图14 外挂物线位移和角位移的时间历程图[57]Fig.14 History of linear and angular displacement of external stores[57]

图15 多个外挂物投放示意图[58]Fig.15 Schematic of multiple external stores release[58]
随着各种计算多体分离问题的CFD算法和格式被提出,基于嵌套/重叠网格技术的Euler-6DOF方法逐渐被用于解决工程上的多体运动问题,如2010—2011年间,许晓平等基于动态嵌套网格技术数值模拟了类“全球鹰”无人机平台的导弹发射过程,结果表明,导弹的尾部流动能明显地改变挂架附近机翼的流场结构,机弹气动干扰显著地影响了导弹的运动特性。2010年,Kim等基于重叠网格技术,并耦合求解Euler方程和6-DOF方程对炸弹与KT-1飞机的分离问题进行了数值研究(图16)。2013—2017年Arora、Anandhanarayanan等采用基于嵌套网格(图17)的Euler-6DOF方法数值模拟了某空空导弹从载机上投放分离过程,得到了空空弹的分离运动参数,并与飞行试验结果进行对比,发现偏航方向运动参数一致性较好,如图18所示。的影响,如Berglind和Tysell。

图16 炸弹与KT-1飞机的投放分离[61]Fig.16 Bomb separation from KT-1 aircraft[61]

图17 载机和导弹附近的嵌套网格示意图[62]Fig.17 Schematic of overset grid near carrier and missile[62]

图18 数值计算和飞行试验结果对比[64]Fig.18 Comparison of numerical calculation and flight testing[64]
1997年Baum等采用Euler-6DOF方法数值模拟副油箱从F-16飞机上投放后的运动过程,图19给出风洞试验、飞行试验和数值计算这3种方法得到的副油箱下落过程俯仰角的时间历程,从图可知,采用数值计算方法得到的计算结果很接近飞行试验数据,能满足工程上的需要。2004年李孝伟和范绪箕基于动态嵌套网格技术,数值模拟了机翼+副油箱投放的气动特性与运动姿态和轨迹。2005年Demir和Alemdaroglu基于嵌套或重叠网格技术,采用CFD-FASTRAM软件对机载外挂物投放问题进行数值模拟,与风洞CTS试验结果进行了对比,验证了数值模拟方法的正确性,并在马赫数0.3 条件下模拟了其副油箱与F-16载机的分离问题。

图19 F-16战机副油箱下落过程俯仰角随时间变化[67]Fig.19 Variation of pitch angle during falling process of F-16 fighter auxiliary fuel tank[67]
基于动网格技术的Euler-6DOF也被用于研究机载悬物投放问题,2001年郭正等基于弹簧近似使得网格变形的非结构动网格技术,采用Euler-6DOF方法数值计算了WPFS标模中的外挂物从机翼上投放过程,但没有与风洞试验结果进行对比。2003年Snyder等采用类似的方法数值模拟了WPFS标模的投放分离问题,Deryl比较了3种外挂物表面网格(图20)对外挂物的运动轨迹和姿态变化的影响,并与风洞试验结果进行对比(图21),结果显示CFD计算结果与风洞试验吻合较好。2003—2004年,Murman等基于自适应笛卡尔网格技术,对GBU-31炸弹与F/A-18C真实飞机的投放分离过程进行Euler-6DOF数值模拟,分别计算了马赫数为0.962 和1.055的两种情况,计算结果与飞行试验结果数据吻合较好。

图20 外挂物表面的3种网格[72]Fig.20 Three grids of external store surface[72]

图21 CFD计算和风洞试验对比(Ma=0.95)[72]Fig.21 Comparison of CFD and wind tunnel testing (Ma=0.95)[72]
随着多体飞行器构型的发展多样化,Euler-6DOF方法也被广大研究者和工程师用在多级飞行器(串联和并联级间分离)、头罩分离、多弹头飞行器(子母炸弹、抛壳分离)等领域。由于高超声速两级入轨空天飞行器的发展需求,国外针对诸如Hyper-X计划中X-43飞行器与助推器分离(图3)开展了数值模拟研究工作,有力地支撑着高超声速飞行器计划的飞行试验验证。关于并联式多级飞行器级间分离问题研究最多的是LGBB(Langley Glide-Back Booster)构型(图22所示),Buning等基于重叠网格技术耦合Euler方程和6DOF方程数值模拟了LGBB构型在马赫数6条件下的级间分离问题,并与风洞试验进行了对比,结果比较一致。

图22 LGBB并联构型[84]Fig.22 Parallel configuration of LGBB[84]
3.1.3 RANS-6DOF方法
由于Euler-6DOF方法是求解无黏的欧拉方程,在实际流动中一般是有黏的,无法准确地模拟气动阻力问题,于是基于雷诺平均 (Reynolds Averaged Navier-Stokes, RANS)-的六自由度运动方程(RANS-6DOF)方法被提出并被广泛应用于飞行器多体分离动力学问题研究,如飞机-存储物(如单个外挂物、多个外挂物、副油箱、机载内埋武器、座舱盖、弹射救生系统等)、多级飞行器(串联和并联级间分离)、头罩分离、子母弹分离、集束薄片等。
国内外学者在采用RANS-6DOF方法研究机载外挂物分离问题时,与Euler-6DOF方法的研究思路是一致的,均是采用WPFS研究标准模型对RASN各种格式、湍流模型进行验证,最终被用于解决工程问题。如1996年,Welterlen等采用洛克希德·马丁公司开发的战术飞机系统(Lockheed Martin Tactical Aircraft Systems, LMTAS)软件(也称为Splitflow)对副油箱与F-16飞机的分离问题进行了数值模拟,Splitflow是基于混合笛卡尔/棱柱形网格技术的有黏求解器。2016年雷娟棉等基于弹簧法和局部网格重构的非结构动网格技术,耦合求解RANS方程和6DOF方程,对不同条件下的外挂式航弹与载机分离过程进行求解,湍流模型采用S-A模型。结果显示,初始分离过程中载机对航弹有很强的气动干扰,对航弹的气动特性、分离轨迹及弹体姿态影响较大。2020年Olejnik等采用RANS-6DOF方法数值模拟了GBU-31炸弹从F-16C战斗机的投放分离过程,湍流模型为S-A模型,并与风洞试验结果进行对比(图23),结果吻合度基本一致。
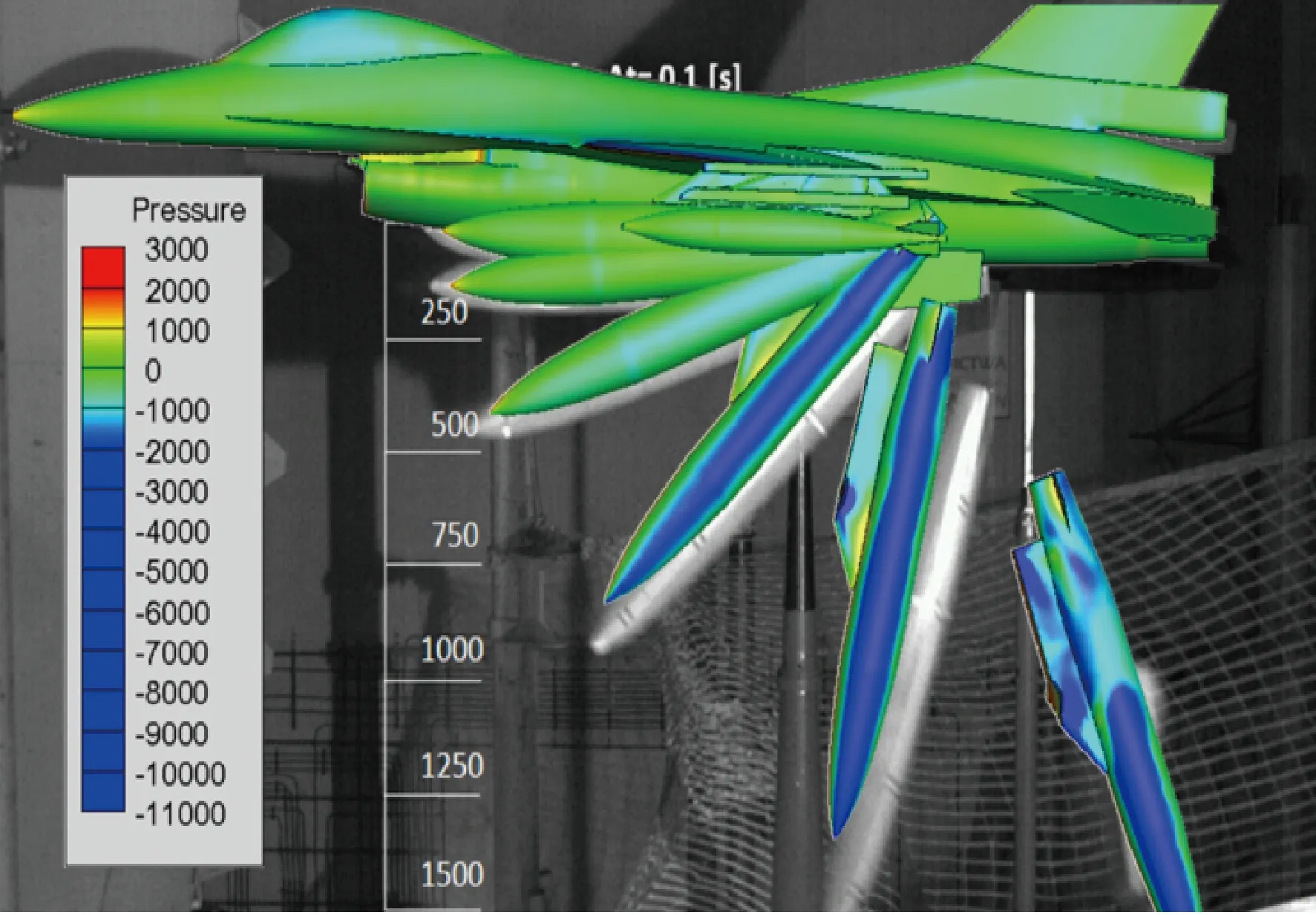
图23 CFD与风洞试验结果对比(来流速度 U∞=30 m/s)[94]Fig.23 Comparison of CFD and wind tunnel testing (U∞=30 m/s)[94]
两级入轨空天飞行器(Two-Stage-To-Orbit, TSTO)是目前高超声速飞行器领域的研究热点,级间分离是两级入轨空天飞行器必须解决的关键技术问题,国内外学者对这一领域开展大量的数值模拟研究, 2020年Liu等基于嵌套/重叠网格技术,耦合RANS和6DOF方程数值求解某并联飞行器的级间分离过程,湍流模型为S-A一方程模型。研究结果显示,两级分离过程存在严重的激波-激波干扰(图24),激波与激波的干扰严重影响了分离体的气动特性,进而影响了分离体的动力学特性。
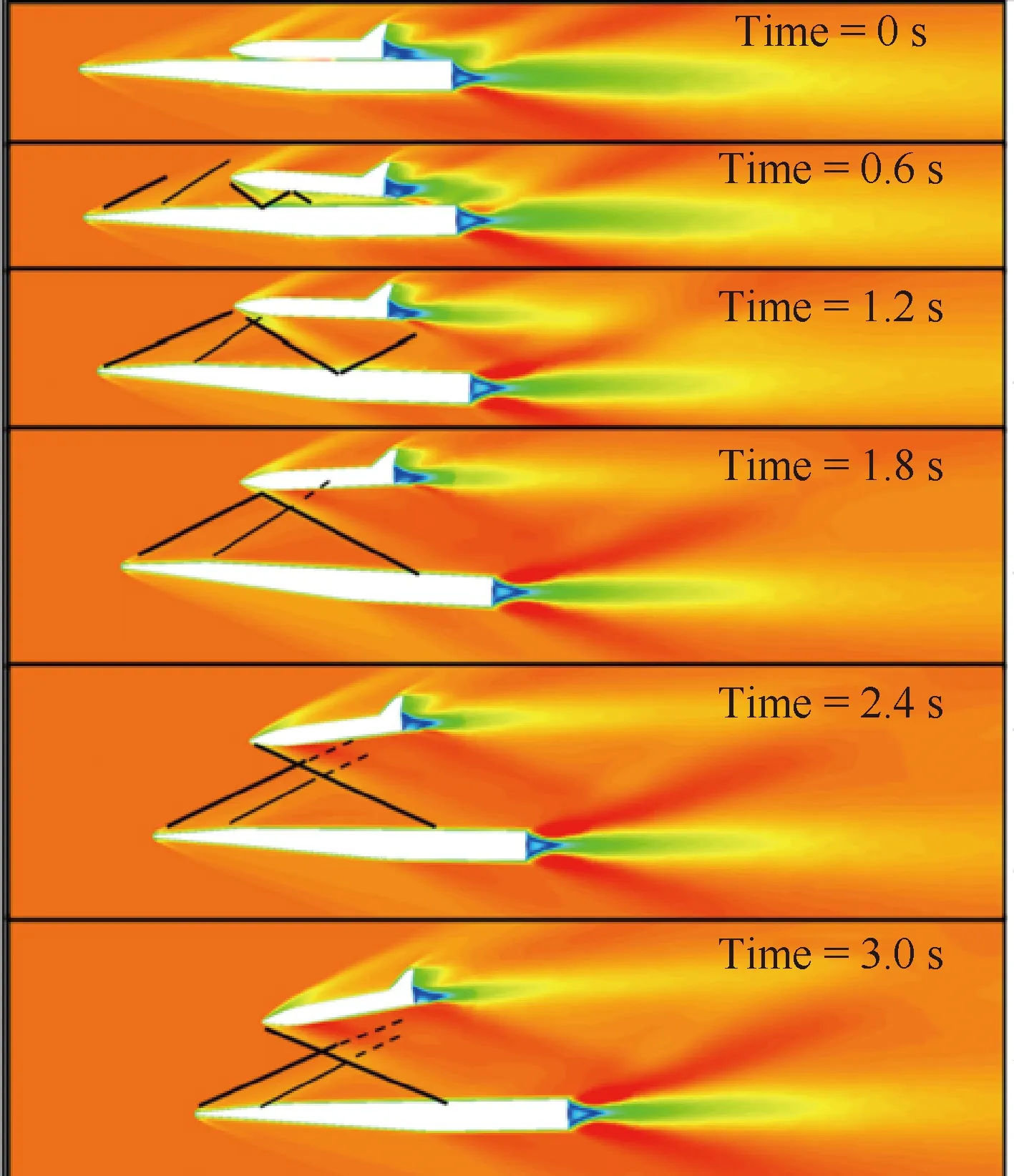
图24 数值模拟结果[18]Fig.24 Numerical simulation results[18]
3.1.4 其他数值模拟方法的研究进展
从检索的文献看,采用大涡模拟(Large Eddy Simulation, LES)、脱体涡模拟(Detached Eddy Simulation, DES)方法研究机载外挂物分离较少,可能的原因是Euler和RANS方法已能准确地模拟机载外挂物分离问题,使用LES和DES方法计算成本高,代价大。LES和DES方法的应用主要集中在机载内埋武器投放分离中(见文献[98]),这主要是由于RANS方法具有无法正确预测武器舱内流场的不稳定性等缺点。
3.2 直接试验预测
多体分离动力学的直接试验预测方法主要有:捕获轨迹试验(Captive Trajectory System Testing, CTS)、风洞投放试验(Wind Tunnel Drop Testing, WTDT)、风洞自由飞试验(Wind Tunnel Free Flight Testing, WTFFT)和飞行试验(Flight Testing, FT),根据飞行试验模型是否缩比,飞行试验可分为缩比飞行试验(Scaled Flight Testing, SFT)和全尺寸飞行试验(Full-Scale Flight Testing, FSFT)。
3.2.1 捕获轨迹试验
捕获轨迹试验是一种基于风洞静态气动力测量与飞行动力学仿真计算的多体分离动力学特性预测的准定常试验方法,它于20世纪60年代初被开发并应用于预测机载外挂物的分离特性。在CTS试验过程中,载体模型被安装在固定支杆上,而带内式天平的分离体模型则安装在能进行六自由度运动的机构上。测得的静态或定常气动力和力矩被代入分离体的6DOF运动方程,并设定一定时间步长计算下一时刻分离体相对运载体的位置和姿态,将控制信息反馈给移动机构,移动机构将分离体移动到相对载机的新位置和姿态上,重复上述整个过程直到分离体的运动轨迹和姿态角完全实现为止。CTS方法能在风洞中直接对飞行器分离问题进行模拟,也常称为“在线(On-lines)”模拟方法。图25为典型的CTS试验图。

图25 典型的CTS试验图[111]Fig.25 Typical CTS experimental diagram[111]
风洞CTS试验最初主要被用于研究悬挂在机翼或腹部上的外挂物(External Store)分离问题,随着多体飞行器的不同布局形式的发展,风洞CTS试验也被用于机载内埋武器和多级飞行器,如背驮式两级入轨空天飞行器和串联级间分离(图26)。值得注意的是,当采用风洞CTS试验技术研究内埋武器机弹分离的问题,分离物模型也被限制从空腔外某个位置开始运动,而不是从空腔内开始分离运动。但正如文献[112]所述,由于外挂物分离物处于准定常的流场环境,基于时间平均气动力测量的CTS试验能很好地模拟外挂式分离物的问题,且精度比较高,然而,内埋武器处于高度复杂的非定常周期性压力载荷的空腔流动中,非定常周期性载荷使得内埋武器的分离运动轨迹和姿态角变得不可重复,使得基于时间平均气动力测量的CTS实验不能高保真地模拟时刻变化的空腔流场。

图26 Hyper-X级间分离的CTS试验示意图[118]Fig.26 Schematic of CTS testing of Hyper-X separation[118]
3.2.2 风洞投放试验
风洞投放试验在风洞中从运载体模型上投放缩比的分离体模型,并采用高速摄影机记录分离体下落,进而用计算机软件产生精确的六自由度分离体的位置和姿态的信息。试验后可用计算机生成的分离体图像来观察轨迹。由于风洞投放试验不需要很复杂的运动机构且试验模型设计简单,它只需按一定相似律缩比模型,这使得风洞投放试验技术成为最早用于多体分离动力学问题研究方法。风洞投放试验是一种完全非定常试验技术,其不仅要考虑作用在动态投放分离模型上的气动力和力矩,还需考虑分离模型对这些气动力和力矩的惯性响应。对于低速风洞投放试验来说,由于气流处于不可压缩状态,通常可忽略马赫数和雷诺数的影响,只需要保证弗劳德数相等即可。然而,对于高速风洞投放试验,由于气体压缩性的影响使得马赫数是必须模拟的相似参数,马赫数和雷诺数不可能同时满足,这使得相似性问题变得复杂。高速风洞投放试验相似设计方法主要有基于马赫数相等的轻模型法和重模型法。重模型法是严格相似的,但其缺点是短周期俯仰振动阻尼不足,模型重,有时无法找到相应的材料加工。轻模型法除垂直方向不相似外,其余运动是严格相似的,模型设计比较容易。针对轻模型法垂直方向不相似问题,国内外学者提出相关多种补偿方法,主要有载机移动法、外加磁场法、加大弹射力法、公式修正法和全尺寸模型投放法,各种方法既有优点,也存在各自的问题。风洞投放试验广泛地被用于解决飞机-存储物(如副油箱、内埋武器),多弹头飞行器(如子母弹抛撒分离、蒙皮分离),超声速飞行器的头罩分离问题。关于风洞投放试验技术及其应用问题详见文献[140]。值得注意的是2014年Flora等采用非定常风洞投放试验研究前缘布置绕流板对内埋武器分离后动力学特性的影响,将流动控制技术应用于机载内埋武器上,并采用先进的纹影显示方法,来流马赫数为2.9,如图27所示。结果表明,当弹舱前缘无流动控制装置时,导弹从舱内向下运动过程中出现抬头现象,当布置小和大绕流板时,导弹表现出不同的运动特性。

图27 内埋武器投放试验图[112]Fig.27 Experimental drawing of internal weapon separation[112]
3.2.3 风洞自由飞试验
风洞自由飞试验是20世纪60年代为研究飞行器动态气动特性而发展起来的一种非定常试验技术,也被用于研究多体飞行器的分离问题,其基本方法是将各分离体锁紧为一体,在风洞流场中迎着气流方向向前发射,使多体飞行器自由飞行至观察窗处,分离解锁装置触发解锁使分离体与运载体分离,同时采用高速摄像等记录设备对各分离体运动过程,实现对多体分离动力学问题的研究。该试验方法可获得分离运动轨迹和姿态角的时间变化规律。风洞自由飞试验与风洞投放试验最大的不同点在于其所有分离体模型均处于自由飞行状态,蒋增辉等详细地论述了风洞自由飞试验技术的应用,并指出其在各个领域的适用性。
3.2.4 飞行试验
飞行试验是将多体飞行器在真实大气环境中进行试验,并采用遥感或无线测量方法得到分离体从运载体上的运动规律,其结果可用于检验地面风洞试验和数值模拟结果的准确度,可用于多体分离问题天地相关性研究。在1960年以前,国外通常采用飞行试验来研究武器投放分离,这种方法效率低,成本高且风险性大。国内外针对飞机-存储物(内埋武器,如图28所示)、多级飞行器(两级入轨空天飞机,如图29所示)等分离问题开展过飞行试验研究。

图28 GUB-38从B-1B中分离的飞行试验图[147]Fig.28 Flight testing diagram of GUB-38 separated from B-1B aircraft[147]

图29 两级入轨飞行器投放飞行试验[148]Fig.29 Flight testing of TSTO vehicle[148]
4 思考与展望
多体分离动力学是飞行器空气动力学与飞行动力学相互耦合的问题,为准确地预测和评估多体飞行器的分离动力学特性,高精度的空气动力学预测成为关键,多体空气动力学是多体分离动力学的基础和前提。基于以上对多体分离动力学问题的总结和调研,给出以下几点思考和展望:
1) 在多体分离动力学的理论预测方法上,理论分析方法是求解较为简化的流动控制模型(如线化小扰动方程),得到分离体上气动力的简化解,进而对分离体的分离动力学进行模拟。其主要特点是具有普遍性,由于作出大量简化假设,理论模型只能反映事物的核心特征。未来多体飞行器往往向复杂性(如面对称)和多样化发展,使用理论分析方法预测多体分离动力学问题常常会受到一定的限制,有时甚至无法得到结果。数值模拟方法一般是采用各种方法和网格技术求解诸如Euler或N-S方程,然后耦合6-DOF运动方程进行模拟,其结果比理论分析结果更为准确,且能模拟复杂多体飞行器的分离动力学问题,随着各种新计算格式和湍流模型的不断涌出,数值模拟技术在多体分离动力学问题具有较大的应用前景,能大大减少风洞试验的次数。
2) 在多体分离动力学的试验预测方法上,捕获轨迹试验是基于定常或静态气动力与飞行动力学耦合计算的一种地面试验模拟方法,其不能考虑分离体的非定常运动效应,且运动机构严重限制模型的运动范围。对于外挂物分离动力学模拟具有一定的优势,且精度较高。然而,对于内埋武器分离来说,由于内埋武器处于具有高度非定常、非线性的空腔流场区域,捕获轨迹试验不能高保真地模拟内埋物的分离动力学问题。风洞投放试验方法是一种基于运动动力学相似的动态试验方法,其模型相似设计难度大,不同模型间存在差异性,该差异性会带来一定的试验误差。由于观察窗尺寸的限制,模型缩比较大,雷诺数相差较大,雷诺数效应加大。未来两级入轨可重复使用空天空天飞行器是未来航空航天的发展方向,两级入轨空天飞行器的主要特点是尺寸相差不大,捕获轨迹试验技术对该类多体分离动力学模拟具有优势。
3) 多体分离动力学问题的预测和评估方法的优缺点并存。随着多体飞行器气动布局复杂化和多样化,采用多种研究方法预测多体分离动力学问题成为必然。理论分析和数值模拟可以进行对比研究,用于比较不同流动控制方程所带来的差异性,数值模拟工作可以用于指导风洞试验和飞行试验工作 (如试验方案设计、试验状态等),风洞试验可以用来验证数值模拟计算模型和理论模型的正确性,飞行试验可以用于验证理论分析、数值模拟和风洞试验结果的正确性 (多体分离的天地相关性问题)。
4) 随着智能化、无人化作战模式或理念的发展,采用大型飞机投放无人机是未来发展方向,无人机与载机的分离动力学问题成为关键技术问题。由于无人机的气动布局为面对称,且具有机翼和控制面等复杂部件。在理论预测上,理论分析方法一般不适用,数值模拟方法可用于求解无人机的复杂外形的分离动力学问题。在试验预测技术上,作者认为捕获轨迹试验比风洞投放试验更适用于无人机的分离动力学问题模拟。尽管风洞投放试验在内埋式无人机的投放分离模拟上具有一定的优势,但由于无人机模型设计时需要满足质量、3个方向转动惯量、3个方向的质心位置,导致模拟设计难度较大。且模型缩比较大,导致无人机模型尺寸较大,雷诺数效应不容易评估。
5) 传统上机载外挂物分离过程的模拟是在运载体为刚体的假设下进行的,即运载体与分离体不会由于作用在它们上的力而经历弹性变形,运载体刚性假设忽略了载机弹性变形对外挂物的影响。近年来,采用无人机挂载武器在军用领域的应用越来越普遍,当载机机翼展弦比较大且刚度较小的情况下,载机的弹性变形无法忽略,需要考虑因弹性变形引起的干扰气动力。载机机翼变形会引起流场的变化,流场变化进而引起作用外挂物上气动力的变化。因而,柔性多体飞行器的分离动力学问题应该受到重视。
猜你喜欢
农业工程学报(2022年12期)2022-09-09
汽车工程学报(2022年3期)2022-06-10
中国新通信(2022年3期)2022-04-11
阅读(高年级)(2022年3期)2022-03-30
华声(2020年10期)2020-11-11
环球飞行(2020年11期)2020-01-11
中国防伪报道(2019年6期)2019-08-08
振动工程学报(2019年2期)2019-05-13
数学大王·中高年级(2018年11期)2018-12-17
商界(2017年12期)2017-12-11
