
基于梯度稀疏和多尺度变分约束的图像增强算法
2022-10-13 10:37黄福珍
工程科学与技术 2022年5期
黄福珍,王 奎
(上海电力大学 自动化工程学院,上海 200090)
降质的图像不仅对人们的视觉感知产生干扰,同时也不利于机器的识别和图像信息的提取,一定程度上影响着目标检测、分类与跟踪等计算机视觉任务的效果。因此,通过图像增强技术获得高质量的图像,具有重要的研究价值和意义。
目前,图像增强主要可以分为直方图均衡法[1]、去雾模型的图像增强法[2]、深度学习增强方法[3]和Retinex算法[4]。直方图均衡利用累积分布函数对图像进行灰度映射,扩展动态范围来提升对比度,但灰度级合并的过程会引起增强结果细节丢失。去雾模型增强对弱光图像进行反转,模拟白天雾图,通过暗通道先验理论[5],实现雾霾的去除来获取增强图像,但由于大气光值与透射率无法做到精准获取,处理结果时常伴随伪影现象。深度学习凭借出色的表示和泛化能力,在图像增强方面得到了应用,但模型复杂度的提升会引起运算时间的急剧增加,对于算力不同的硬件设备不具普适性。Retinex理论用来模拟和解释人类视觉系统如何感知色彩[6],Retinex在进行图像增强时,结合了人眼的视觉机理,所以近年来受到了学者们的广泛研究。
通常情况下,Retinex用一个低通的高斯滤波器与原始图像卷积进行照度估计,在对数域中剔除估计结果,得到反映图像本征的反射图像作为增强结果。在中心环绕模型中,比较有代表性的算法有单尺度Retinex(single-scale Retinex,SSR)算法[7]、多尺度Retinex(multi-scale Retinex,MSR)算法[8]和带颜色恢复的多尺度Retinex(multi-scale Retinex with color restoration,MSRCR)算法[9-10]。由于高斯滤波器估计的照度无法满足光照分布情况,使得增强图像容易整体泛灰,出现伪影效应。于是,有学者将具有平滑保边特性的双边滤波[11]、引导滤波[12]和加权最小二乘滤波[13]等分别引入到中心环绕函数中,但粗糙的照度使得增强结果往往不能令人满意。在变分框架下,Kimmel等[14]认为照度分量具有空间平滑性,在对数域中提出用变分方法约束照度,通过欧拉-拉格朗日方程求解,但图像局部区域存在曝光不足现象。近些年,研究人员通过分析对数变换的特点,证明对数变换抑制了图像明亮区域中梯度大小的变化,不适合直接作为正则化项使用,先后提出了基于照度和反射图同时估计的最大后验概率变分模型[15]和加权变分模型[16],尽管获得了更好的先验表示,但图像局部暗区亮度提升不明显。针对非对数域,Guo等[17]利用RGB三通道最大值构造初始光照图,通过施加变分约束来细化照度,但是,增强的图像细节在去噪后却未能得到有效突出,且在图像亮区产生了过增强现象。Fu等[18]采用一种基于形态学闭合的照度估计算法,通过融合派生的输入和相应的权重,产生一个调整后的照度,但增强结果不能有效突出纹理丰富区域的真实感。为了降低结果中的噪声,Li等[19]提出一种带有噪声项的Retinex模型,用L1范数限制照度的分段平滑度,对反射图的梯度进行结构保真,但图像对比度整体表现不佳。Ren等[20]建立了一个低秩正则化Retinex模型,通过惩罚梯度的L1范数来约束照明,同时对照明和反射图进行估计,抑制了反射图像中的噪声,但增强结果暗区细节存在丢失现象。Xu等[21]通过设计一个指数化的平均局部方差滤波器,提出一种基于结构和纹理感知的Retinex模型,但增强图像在原有暗区的层次感相对较低。Tang等[22]利用局部平坦度作为先验约束,并用一种新的局部偏差量度来量化局部照明平坦度,选择性地将局部平坦度施加给照明,提出了基于局部平坦度的Retinex变分方法,能够较准确地恢复光照不均图像,保持良好的对比度,但图像局部存在色彩偏移现象。
针对上述问题,本文提出一种基于梯度稀疏和多尺度变分约束的图像增强算法。在HSV空间提取亮度分量,借助该分量构建基于梯度稀疏的变分约束模型,以更加精准地获取照度图像。通过Retinex得到反射图像后,以照度图像为基础,获取细节图像进行多尺度细节增强。利用伽马校正对照度图像进行调整,与经细节提升的反射图像重新组合,将合成结果转换至RGB空间得到最终的增强图像。最后,通过实验测试,验证了本文算法的有效性。
1 Retinex理论
一幅经人眼所感知的图像,可在Retinex理论下分成两部分,分别为照度图像和反射图像。照度图像可认为是对原始图像的低频区域的提取,变化较为缓慢,决定了图像像素的动态区间阈值范围;反射图像则属于原始图像的高频区段,变化相对较快,它表征了图像的内置属性。Retinex理论就是通过剔除照度的干扰,还原图像的本质特性,进而实现增强图像的目标。Retinex模型的表达式如下:

式中,I(x,y)为原始图像,R(x,y)为反射图像,L(x,y)为照度图像。
尽管Retinex能够分离出图像的本征属性,提升暗视觉条件下图像的亮度,但仍然有以下不足之处:1)该方法作用于RGB空间,由于三原色的相互影响,会导致增强结果色彩难以保真,色彩出现偏移现象。2)其低通的高斯滤波器保边能力较差,当光照不一致时,照度估计结果无法满足光照分布,使得增强结果边缘模糊,整体泛灰,并伴有光晕伪影。3)该方法直接将估计的照度完全剔除,导致图像整体曝光过高,会出现过增强问题。
2 本文算法
针对上述问题,本文提出了一种基于梯度稀疏和多尺度变分约束的图像增强算法。本文算法主要包括照度估计、细节提升和亮度重组3个环节。首先,将输入图像从RGB空间转换至HSV空间,重点构造了具有梯度稀疏特性的变分约束,并将其作用于亮度通道用来进行照度估计。在该约束中,通过施加3个不同的控制因子分别得到照度1、2和3,3个照度取均值得到最终照度估计结果。然后,对于估计的照度图像,一方面,基于Retinex理论获得反射图像;另一方面,通过伽马校正进行亮度调节。利用亮度通道和照度1的差值得到粗略细节,照度1和2的差值得到中等细节,照度2和3的差值得到精细细节,3个细节加权得到加权细节。通过加权细节与反射图像的叠加来进行细节提升。将经伽马校正后的照度图像与细节提升后的反射图像重新组合,得到输出的亮度通道。最后,将图像从HSV空间转换至RGB空间,得到增强的输出图像。本文算法流程如图1所示。
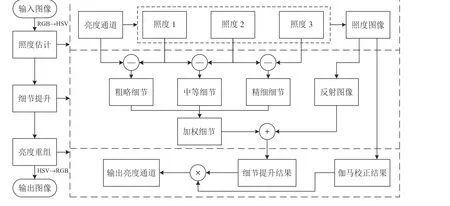
图1 本文算法流程Fig. 1 Flow of proposed algorithm
2.1 照度估计
照度图像的获取是Retinex理论的关键环节。一个较好的照度结果应该具备包含图像整体结构,同时纹理上应该保持平滑。在Retinex理论中,中心环绕模型利用高斯滤波器卷积,从而进行照度提取。然而,由于图像中平坦区和边缘区的存在,光照一致性假设在图像中并非恒成立,这也导致了照度结果与滤波器的选择相关联。即使是其他低通保边滤波器,在照度估计上也是粗糙的,这便是常常使得增强效果不理想的主要原因。变分Retinex方法通过引入变分先验,对目标函数进行优化,能够有效地提高所估计照度结果的准确率。对于全变分(total variation,TV)[23]而言,其正则项在对图像结构和纹理的区分上具有局限性。于是,Xu等[24]提出了相对全变分(relative total variation,RTV),RTV的正则项表达式如下:
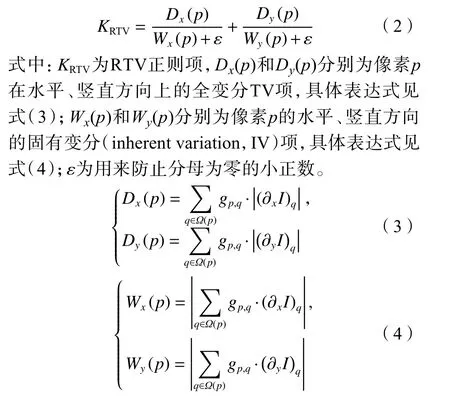
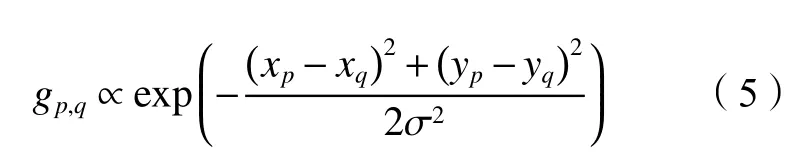
式(3)、(4)中:Ω(p)为以像素p作为中心的窗口; ∂x、∂y分别为水平、竖直方向的偏导;gp,q为高斯函数,描述图像区域的空间关联性,用来突出主要结构,其表达式为:
在RTV中,由于TV项和IV项的共同作用,使得图像结构能从纹理中更好地分离。如前所述,照度估计本质上是模糊纹理,保留结构。然而,结构的非连续性会使得照度在不同区域产生突变。RTV正则项忽略了高斯函数在对图像纹理得到较好平滑的同时,会一定程度地模糊掉相应的结构部分,从而影响最终结构的良好保持。因此,本文在RTV正则项中引入零范数梯度稀疏约束[25],它能够模糊图像中的不重要纹理细节,同时,可以较好地保护视觉上的显著性结构。为适应其全局显著特性,当零范数梯度稀疏时,将以像素p为中心的局部窗口Ω(p)进行延展,使窗口四周与图像边界重合。本文对RTV正则项重新定义,形成改进的相对全变分IRTV(improved relative total variation,IRTV)正则项,具体表达式如下:

通过对RTV正则项引入零范数梯度稀疏约束,在全局显著特性的作用下,抚平弱化纹理细节,突出重要结构信息,从而使得图像纹理结构更易于分离。在HSV空间中,对亮度通道V施加IRTV正则项,构建目标函数如下:
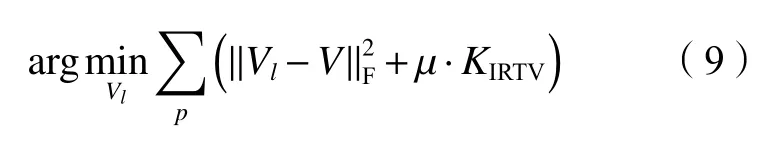
式中: ‖·‖F为F范数;式(9)的第1项为目标保真项,用来确保亮度通道照度输出Vl与亮度通道V的结构相似度;第2项为IRTV正则项,用来平滑纹理,保留结构; µ为控制因子,用来约束两项的相对重要程度。
式(9)中,由于目标函数是非凸的,并且,在IRTV正则项中,涉及到一个离散的梯度度量,即零范数梯度稀疏约束,无法用传统梯度下降法[26]或其他离散优化方法轻易求解。因此,本文借鉴RTV的求解策略,将其分解为非线性项和二次项,通过近似迭代重加权最小二乘的方式,将其转换为求解一系列线性方程组的问题。与RTV的求解策略不同的是,本文在求解式(9)时,需要采用交替最小化方法[27-28],得到零范数梯度稀疏的闭式解。
进一步地,受多尺度Retinex的启发,结合第3.1.1节的分析,为了平衡不同控制因子对照度结果的影响,将其扩增为3个尺度,并赋予同等权值,形成多尺度变分约束模型,表达式如下:
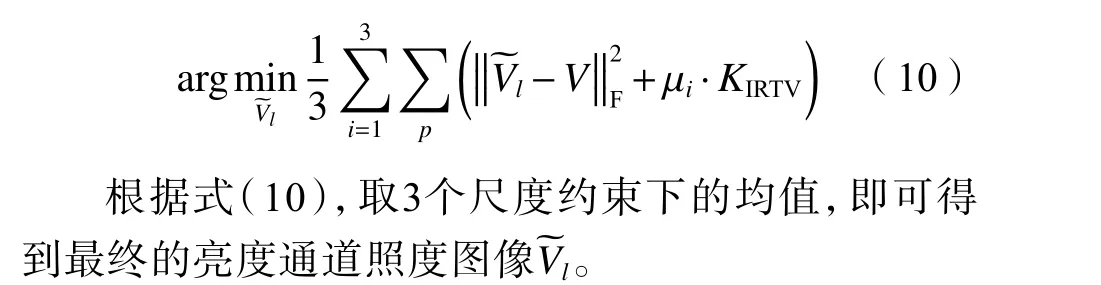
2.2 细节提升
式(11)~(12)中:D1为粗略细节;D2为中等细节;D3为精细细节;D为D1、D2和D3的加权细节;ω1、ω2和ω3为权值系数,根据文献[29],分别为0.5、0.5和0.25。


2.3 亮度重组


重组亮度通道后,经过颜色空间转换可以获得输出的增强图像。
3 实验与分析
下面评估本文提出算法的性能。首先,分析本文算法的参数设置。然后,分别开展实验比较照度估计结果、测试图像色彩和验证图像增强特性。其中,实验内容包括照度结果比较、图像色彩评价和低照度图像增强实验。最后,对算法效率进行讨论。实验测试图像源于文献[15-18]及LOL数据集[30],通过进行仿真测试,选择具有代表性的数据进行结果对比。实验中,编程使用的笔记本电脑为Windows 8系统,安装内存为4 GB,主频2.20 GHz,搭载Intel i5处理器。实验算法代码均在MATLAB 2014a仿真环境下运行。
3.1 参数设置
3.1.1 λ和µ的设置
为了展现权重参数λ和控制因子µ对照度结果的影响,通过分别固定µ改变λ和固定λ改变µ的方式进行分析。
1)固定µ=0.01,改变λ值,得到的照度图像如图2所示。

图2 不同 λ值下的照度图像Fig. 2 Illumination images under different λ values
从图2可以看出:当µ=0.01时,亮度通道随着λ值的增加而不断模糊。λ值较小时,图像整体结构保留较好,但照度平缓区未能得到有效模糊。λ值越大,亮度通道的纹理越平滑,持续增大λ值会导致图像结构也被模糊掉。λ值过大所造成的直接结果是,图像原本共存的结构纹理以一种过平滑的情形保持混叠。
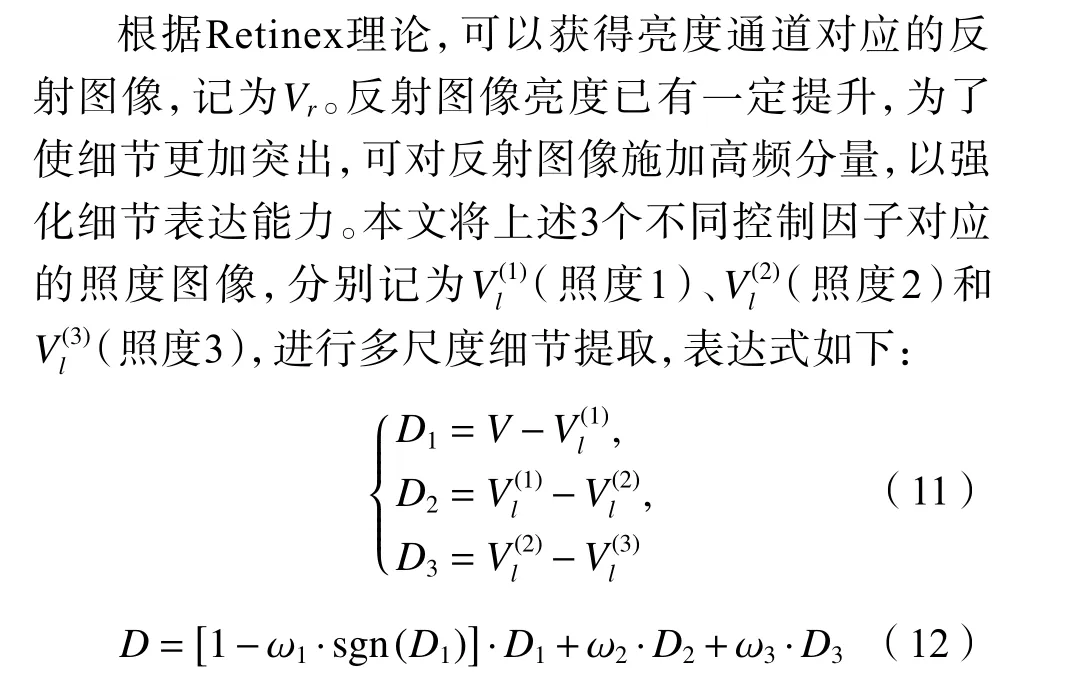
2)固定λ=0.01,改变µ值,得到的照度图像如图3所示。
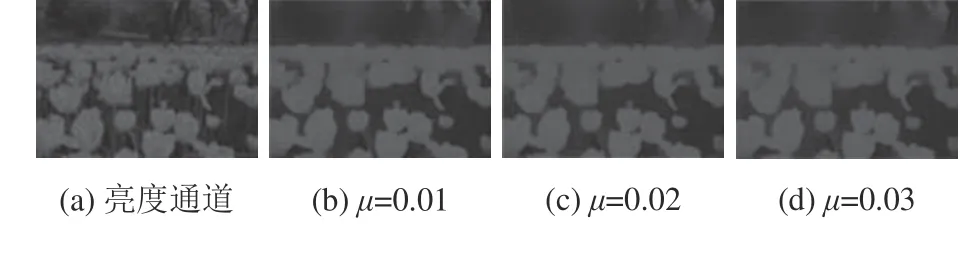
图3 不同 µ值下的照度图像Fig. 3 Illumination images under different µ values
从图3可以看出:当λ=0.01时,亮度通道随着µ值的逐渐增加而不断平滑。换句话说,µ值越大,IRTV正则项的重要程度越高,会弱化保真项的重要性,导致照度与亮度通道产生较大的偏离。但µ值较小时,会降低图像结构纹理分离度,从而影响结果的精确度。
在不同的λ和µ值作用下,照度图像会产生不同程度的平滑效果。采用平均梯度(average gradient,AG)对不同的照度图像进行评估,AG可以表征图像纹理层次变化率,体现边缘附近灰度差别。图像的AG越小,说明平滑度越高。不同参数因子下的AG变化如图4所示。
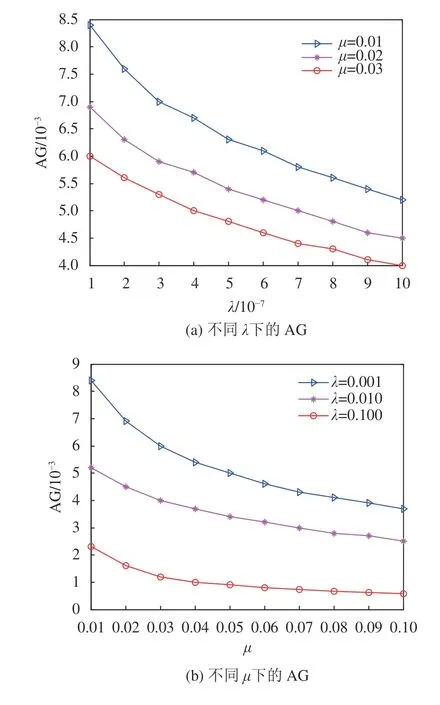
图4 不同 λ 和 µ下的AG变化曲线Fig. 4 AG change curves under different λ and µ
从图4可以看出:随着权重参数和控制因子的增加,AG不断降低。在不同的权重参数下,AG产生的变化量基本保持一致,也即AG对不同权重参数的敏感偏差是近似相同的。对于不同的控制因子,可以明显发现其值较小时,AG相对较高,随着其值的逐渐增加,曲线逐步趋于平缓,变化速率才近似稳定。因此,将权重参数和控制因子的取值分别设置为λ=0.01,µ1=0.01,µ2=0.02,µ3=0.03。
3.1.2 γ的设置
不同的γ值会对照度图像产生不同的拉伸效果,进而影响增强结果的亮度。不同γ值对应的校正曲线如图5所示。
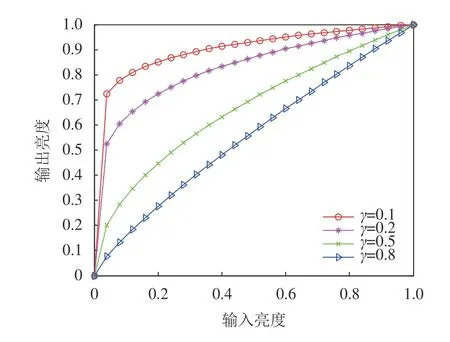
图5 不同 γ值下的校正曲线Fig. 5 Correction curves under different γ values
将调整后的照度图像与细节提升结果重组,得到输出的亮度通道。经过颜色空间转换,可恢复出不同的增强结果。不同γ值对应的照度图像和恢复图像如图6所示。其中,第1行为照度图像,第2行为恢复图像,第3行为恢复图像对应的灰度直方图。
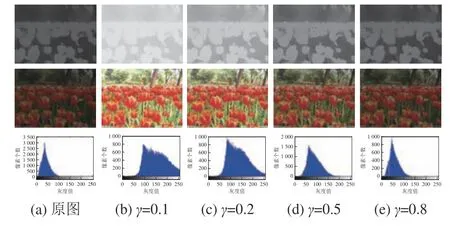
图6 不同 γ值下的照度图像和恢复图像Fig. 6 Illumination images and restored images under different γ values
从图6可以看出:在不同γ值下,照度图像与恢复图像的亮度发生改变。恢复图像亮度跟随照度图像变化,即随着γ值的增加,图像的亮度逐渐降低。当γ值较大时,恢复图像亮度较低,视觉感知效果不佳。当γ值过小时,由于照度图像亮度过高,导致恢复图像存在过曝现象,且极易放大图像中的噪声,表现在第3行的灰度直方图中,灰度级分布随γ值增加整体向左移动,且越来越多的像素向灰度级较低的区域集中。因此,本文将γ的取值设置为0.2,其在大多数情况下具备良好的恢复效果。
3.2 照度结果比较
为比较不同方法照度结果的特性,对比基于照度图估计的低照度图像增强(low-light illumination map estimation,LIME)方法、RTV方法和本文方法,不同方法得到的照度结果如图7所示。由图7不难发现,尽管LIME方法平滑了图像纹理,但图像结构几乎没有得到有效保留。相比LIME方法,RTV方法的图像的结构相对完整,但依然存在模糊现象,且图像纹理未能充分平滑,结构纹理没有有效分离。本文方法不仅平滑了图像纹理,且在光照突变化处,轮廓清晰突出,结构纹理被明显分离。
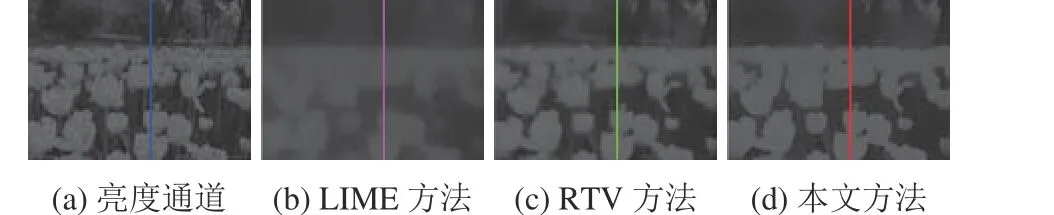
图7 不同方法对应的照度结果Fig. 7 Illumination results corresponding to different methods
为了更好地说明本文方法照度结果的准确性,分别扫描图7中图像的第200列的像素(如图7中线条位置所示),第200列像素的曲线变化结果如图8所示。
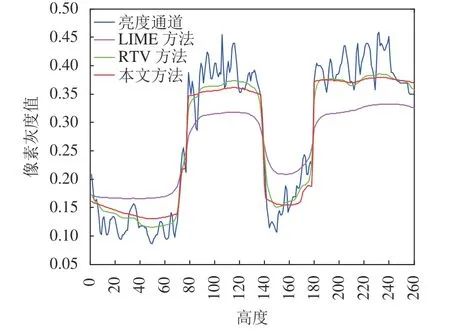
图8 不同算法的像素变化曲线Fig. 8 Pixels change curves under different algorithms
从图8可以看出:在像素灰度值变化相对缓慢处,LIME方法和本文方法使像素值变化更为平缓;RTV方法仍然存在一定程度的像素差,该处梯度未能得到充分稀疏。对于像素灰度值剧烈变化处,RTV方法和本文算法能够跟随这种变化趋势,LIME方法却发生了较大偏离,该处梯度产生了过稀疏现象。因此,本文方法不仅能够充分稀疏像素平缓区的梯度,还能适应像素变化剧烈区的变化趋势,表明了本文方法符合光照变化的分布特性,提取的照度更为准确。
3.3 图像色彩评价
为测试本文算法的色彩效果,将本文算法与其在RGB空间增强的IRTVR(improved Relative total variation and RGB)算法、经灰度世界色彩预处理的GWR(gray world and Retinex)算法、带颜色恢复后处理的MSRCR算法进行图像色彩测试对比,结果如图9所示。
根据图9的结果可以发现:在RGB空间中,由于IRTVR算法未对颜色进行处理,使得增强图像色彩出现了失真(图9(b))。GWR算法先采用灰度世界算法对图像颜色做预处理,再通过Retinex算法增强图像,但整体颜色依然存在偏移现象,与真实场景色彩具有一定的差异(图9(c))。MSRCR算法通过引入颜色恢复因子对图像颜色做后处理,尽管图像颜色得到了一定程度的恢复,但仍存在欠饱和问题,色彩丰富程度不够(图9(d))。本文算法利用HSV空间3分量的解耦,保留原始色调,达到了比其他3种算法更好的色彩效果,有着更高的色彩丰富程度,且色彩还原度更接近于真实场景(图9(e))。
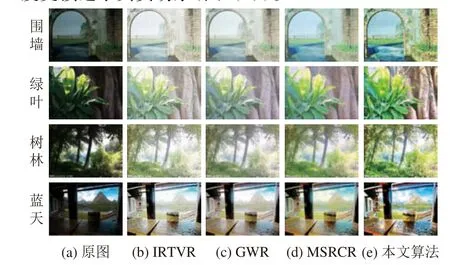
图9 不同算法的图像色彩测试Fig. 9 Image color test under different algorithms
采用色彩丰富度(color colorfulness index,CCI)[31]和色差(color difference,CD)[32]对不同算法的测试结果进行色彩评估。其中:CCI用来衡量图像颜色鲜艳生动程度,其值越大,表明颜色越丰富;CD用来描述参考图像与失真图像颜色间的欧氏距离,其值越小,表明图像色彩失真程度越低。不同算法的图像色彩评估如图10所示。
从图10可以看出:本文算法的CCI指标在4幅不同图像上均处于最高水平,表明了本文算法获得的图像色彩更加生动鲜艳,具有更高的丰富度。在CD指标的表现上,本文算法比另外3种算法的数值水平更低,表明经过本文算法所得图像与原图的色差最小,色彩保真度更高。

图10 不同算法的图像色彩评估Fig. 10 Image color evaluation under different algorithms
3.4 低照度图像增强实验
为验证本文算法增强图像的有效性,分别进行背光、光照不均和弱光图像增强实验。将本文算法与10种算法进行对比,包括经典的MSR和MSRCR算法、结构和纹理感知的Retinex模型(structure and texture aware Retinex,STAR)[21]、LIME[17]、鲁棒的Retinex模型(robust Retinex model,RRM)[19]、低秩正则化Retinex模型(low-rank regularized Retinex model,LR3M)[20]、基于局部平坦度变分模型(local flatness based variational,LFV)[22]、基于融合增强模型(fusion-based enhancing,FBE)[18]、加权变分模型(weighted variational model,WVM)[16]、照度与反射图像同时估计的最大后验概率变分模型(simultaneous reflectance and illumination estimation,SRIE)[15]等近年先进的图像增强算法。分别从视觉特性和定量表现方面对图像进行质量主客观评价。采用的客观评价指标[33]包括均值(mean value,MV)、AG和信息熵(information entropy, IE)。其中:MV反映图像的平均亮度,其值越大,亮度越高;AG表征纹理变化,其值越大,层次感越强;IE描述图像信息量,其值越大,信息越丰富。
3.4.1 背光图像增强
背光图像的前景处于成像设备和光源之间,通常具有背景明亮、前景较暗的特点。不同算法的背光图像增强结果如图11所示。
从图11可以看出:MSR和MSRCR提升了图像亮度,但图像整体泛灰,细节丢失严重。STAR算法增强结果中,细节同样没有突出,具体表现在天空云朵结构平滑。LIME算法使得图像层次较为分明,但前景背景亮度反差较大。RRM和LR3M去除了图像噪声,但导致了细节部分存在不同程度的模糊。LFV和SRIE算法的结构层次不佳,表现在云朵边缘未能有效凸显。FBE和WVM算法导致图像前景与背景不协调,且WVM整体对比度偏低。相比之下,本文算法增强图像的亮度有较好的提升,且在细节表现上比其他10种算法更为突出,基本符合人眼的视觉感知。
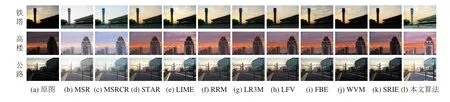
图11 不同算法下的背光图像增强结果Fig. 11 Backlight image enhancement results under different algorithms
采用MV、AG和IE定量评估不同算法下的背光 图像增强结果,如表1所示。
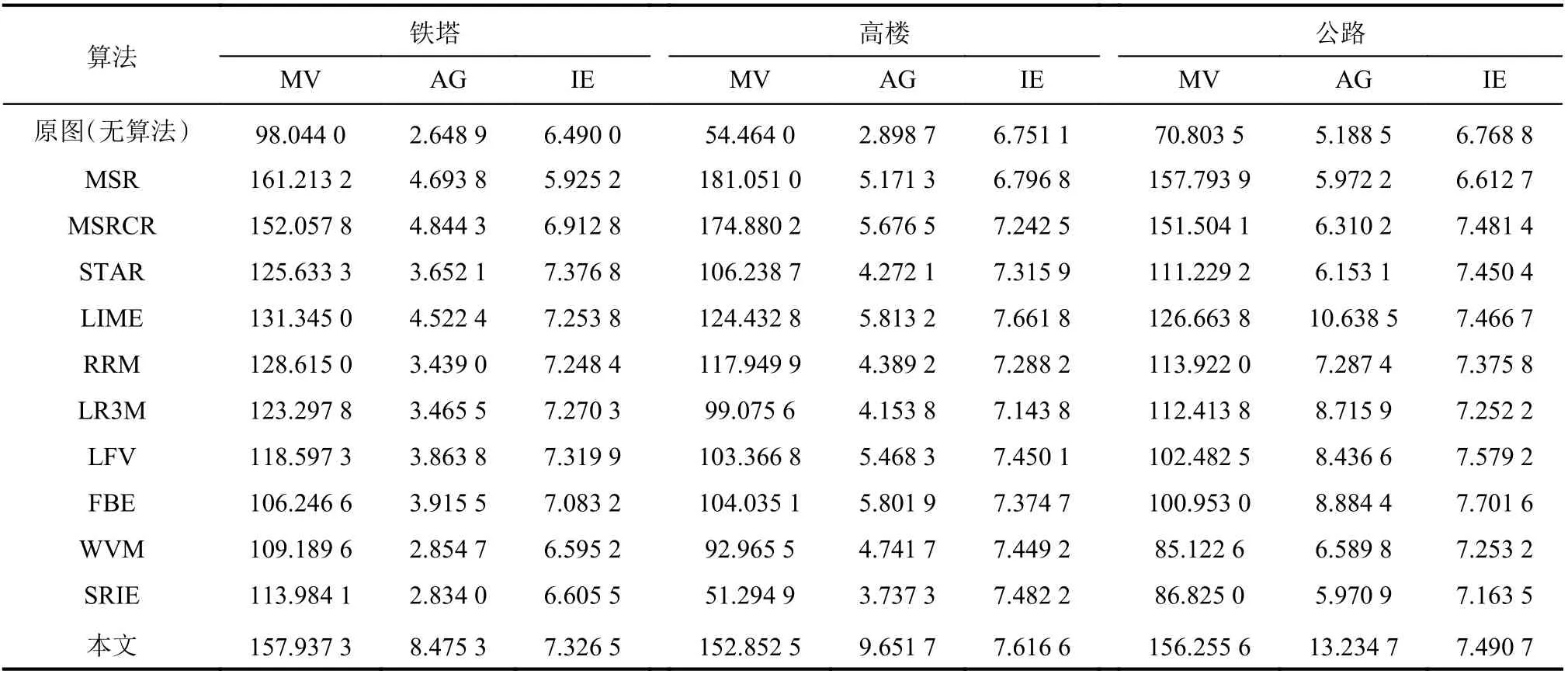
表1 不同算法的背光图像增强结果定量评估Tab. 1 Quantitative evaluation of backlight image enhancement results under different algorithms
从表1可以发现:在背光增强图像中,MSR有最高的MV值,本文算法的MV除在高楼图像中同时低于MSR和MSRCR外,在铁塔和公路图像上均取得了次高值。本文算法的AG在3幅背光图像增强结果中均取得了最高值。在IE的表现上,本文算法在公路图像中低于LFV和FBE,高于其他8种算法;在铁塔和高楼图像上仅分别低于STAR和LIME,高于其他9种算法。
3.4.2 光照不均图像增强
光照不均图像一般可以认为图像的前景或背景中同时存在亮暗区,具有杂乱的光照分布。不同算法下的光照不均图像增强结果如图12所示。

图12 不同算法下的光照不均图像增强结果Fig. 12 Image enhancement results of uneven illumination under different algorithms
从图12可以看出:经典的MSR和MSRCR使得图像的明亮程度提高,但图像整体较为模糊。尽管STAR加强了图像结构纹理表达能力,但存在一定的细节丢失现象。LIME使图像亮区过增强,暗区提升程度不够,表现在鲜花图像中墙角的花朵上。RRM、LR3M和LFV提升了对比度,但RRM和LR3M平滑了图像较多细节信息,LFV局部暗区细节未能突出,表现在天鹅图像中天鹅旁边的草丛处。尽管FBE算法融合了图像不同的优势,但依然在图像暗区附近不能令人满意。WVM和SRIE的亮度表现不佳,存在欠增强问题。本文算法的视觉效果比其他算法明显提升,色彩保真度更高,结构层次感更强。
采用MV、AG和IE定量评估不同算法下的光照不均图像增强结果,如表2所示。

表2 不同算法的光照不均图像增强结果定量评估Tab. 2 Quantitative evaluation of uneven illumination image enhancement results by different algorithms
从表2可以发现:在天鹅、桌子和鲜花图像中,本文算法的AG高于其他10种算法;本文算法的MV仅低于MSR算法;本文算法的IE除在天鹅图像中略低于FBE,在桌子图像中略低于MSRCR外,均高于其他算法。
3.4.3 弱光图像增强
弱光图像通常指的是图像光照强度不高。更为狭义地,即是整幅图像几乎或完全处于暗区的合成图像,人眼基本或很难捕获到相对光线的存在。不同算法下的弱光图像增强结果如图13所示。
从图13可以看出:在光照极弱的条件下,MSR和MSRCR能够大幅度提升原图的明亮度,但整体皆存在过增强现象。STAR和RRM的整体表现不自然,在书本图像中书本附近及盆子边缘的表现上较为模糊。LIME存在一定程度的亮暗反差,表现在墙壁图像中空调附近墙壁较亮而墙角较暗。LR3M增强结果的亮度整体仍处于偏低状态,整体细节被暗区所覆盖。LFV存在色偏现象,具体表现在书本图像中订书机颜色上。FBE的对比度较好,但局部细节表达能力不强。WVM和SRIE的整体亮度提升欠缺,视觉效果不佳。相比而言,本文算法增强结果亮度适中,边缘细节较为突出,更加接近于真实场景。

图13 不同算法下的弱光图像增强结果Fig. 13 Weak light image enhancement results under different algorithms
采用MV、AG和IE定量评估不同算法下的弱光图像增强结果,如表3所示。
从表3可以发现:在弱光图像增强结果中,本文算法的MV低于MSR和MSRCR算法;本文算法的AG指标在以上定量表现中取得了最高值;本文算法的IE指标在墙壁和水盆图像中皆为最高,仅在书本图像中略低于对应的LIME算法。
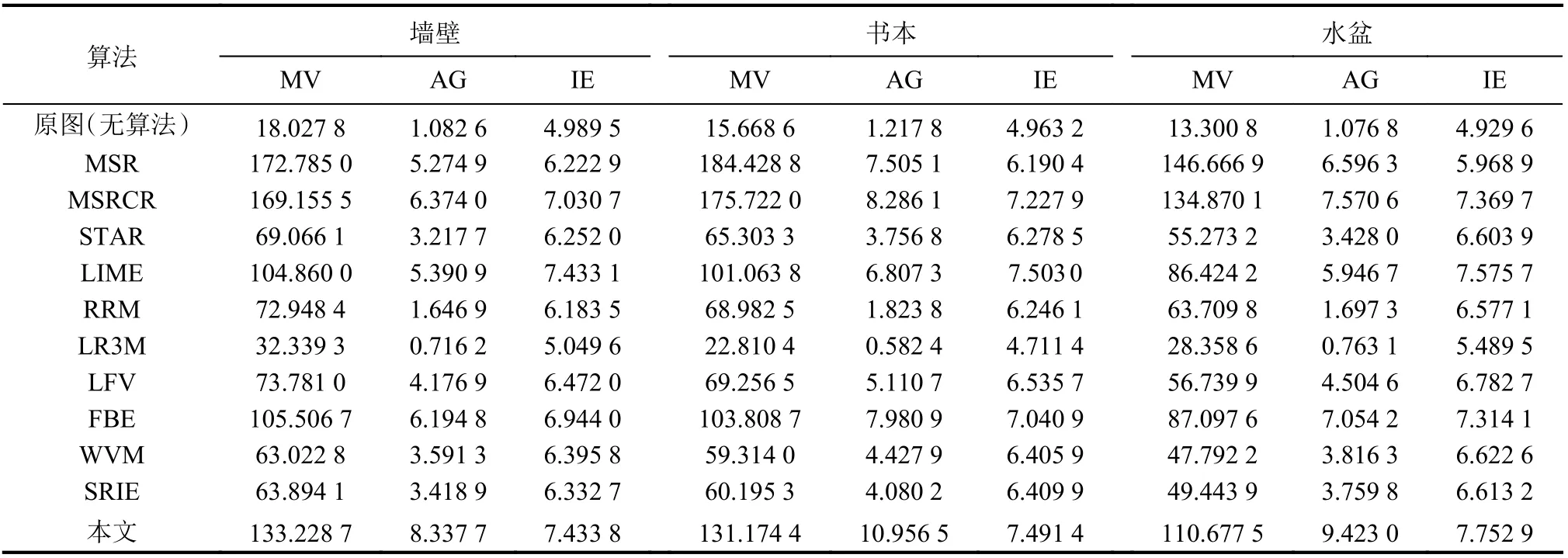
表3 不同算法的弱光图像增强结果定量评估Tab. 3 Quantitative evaluation of weak light image enhancement results by different algorithms
为了直观对比同一指标在不同算法上的表现,分别取MV、AG和IE在背光、光照不均和弱光增强图像上的平均值。不同算法的客观指标平均值如图14所示。
从图14可以看出:本文算法在背光、光照不均和弱光增强图像的平均AG和IE高于其他10种算法。在平均MV的表现上,本文算法低于MSR和MSRCR,高于其他8种算法。通过观察MSR和MSRCR的增强结果可以发现,图像整体泛灰,出现了明显的过增强现象。尽管本文算法的平均MV未能达到最优,但其增强的图像亮度适中,结构层次强,细节信息丰富,更符合人眼的视觉感知。
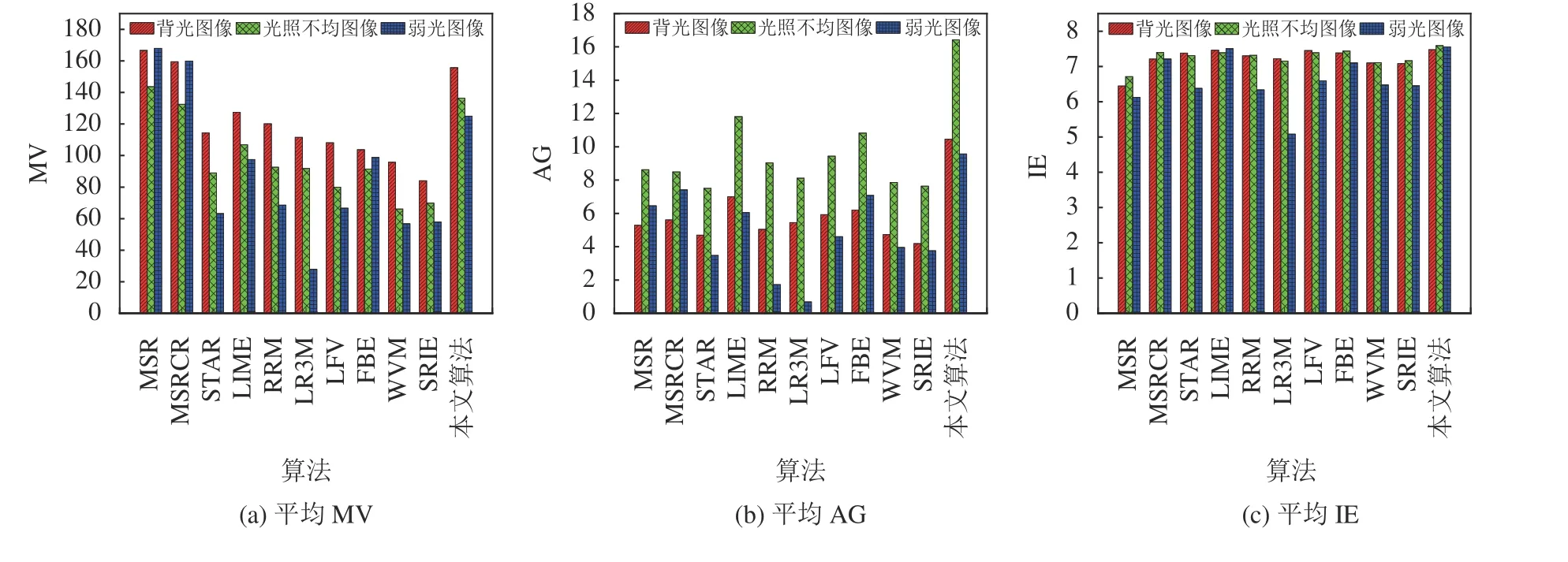
图14 不同算法的客观指标平均值Fig. 14 Average value of objective indexes of different algorithms
3.5 算法效率
为对比不同算法的运行效率,分别对大小为200×200像素、300×300像素和400×400像素的图像进行测试。每种算法在不同大小的图像上各测试10次,不同算法的平均运行效率如图15所示。
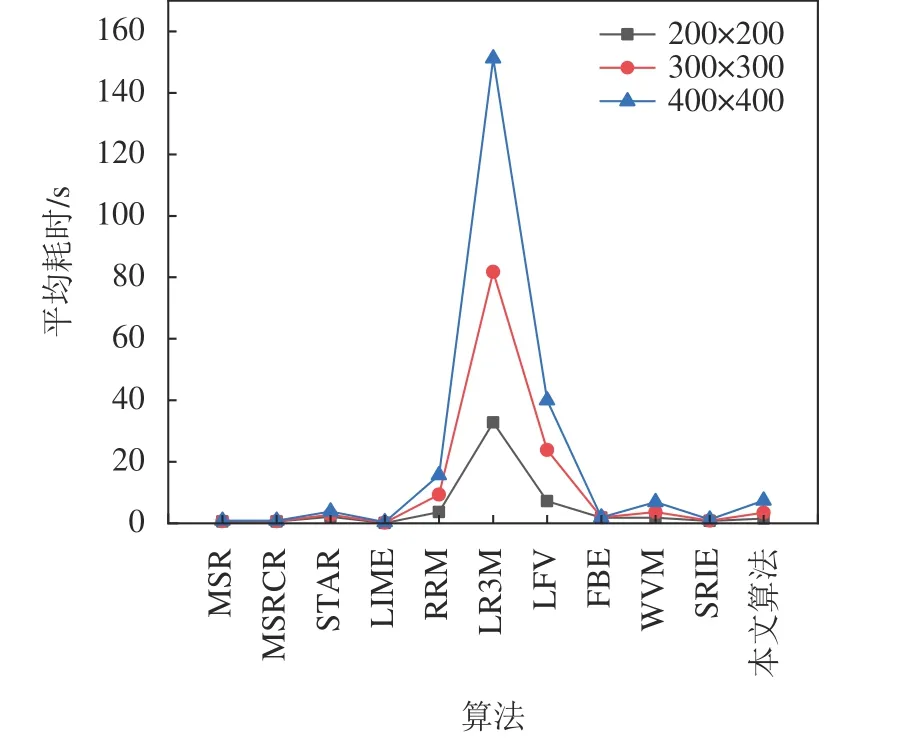
图15 不同算法的平均运行效率Fig. 15 Average operating efficiency of different algorithms
从图15可以看出:LIME平均运行时间最快,其次是MSR和MSRCR。本文算法的平均耗时与STAR和WVM相当,略高于FBE和SRIE,低于RRM、LR3M和LFV。
4 结 论
本文针对视觉感知不佳的低亮度图像,提出了一种基于梯度稀疏和多尺度变分约束的图像增强算法。根据零范数的梯度全局显著特性,定义了一个新的相对全变分正则项,并通过构建多尺度变分模型,将其施加到HSV空间,用来对亮度通道进行约束,以准确获取照度图像。通过多尺度细节提升的方式,强化经Retinex理论得到的反射图像的细节表达能力。采用伽马函数对图像亮度后处理,经过图像重组并恢复,得到最终的增强图像。通过多种算法的定性与定量实验比较,验证了本文算法增强的图像亮度适宜,色彩保真度高,结构细节突出,取得了更好的视觉效果。同时,本文算法适用于不同类型的低照度图像,不仅鲁棒性强,且运算效率较高。今后的研究工作中,将考虑引入噪声先验约束,从图像中分离出高频噪声,使增强图像受噪声干扰程度最小,以进一步提升图像视觉效果。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
航天返回与遥感(2022年2期)2022-05-12
计算机研究与发展(2022年3期)2022-03-09
科学与生活(2021年14期)2021-09-10
燃气涡轮试验与研究(2021年6期)2021-08-01
杭州电子科技大学学报(自然科学版)(2021年1期)2021-03-17
船舶与海洋工程(2019年4期)2019-09-13
计算机应用(2016年10期)2017-05-12
国外科技新书评介(2016年9期)2016-05-14
财经界·下旬刊(2009年5期)2009-12-30
