
基于特征参数的井眼轨迹模式识别与分段方法
2022-10-16 02:29刘卫星杨金显
电子科技 2022年10期
刘卫星,杨金显
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
随着油气勘探的发展,定向钻井轨迹拟合精度受到越来越多的重视。定向钻井的核心技术是监测和控制,监测的任务是根据测斜数据计算出实钻轨迹;控制的任务是根据监测结果控制钻进方向[1-3]。由于测斜时只能获得一系列离散测点处的井深、井斜角、方位角等基本参数,无法还原各测段内井眼轨迹的真实形态,因此需要基于假设条件和数学模型来计算井眼轨迹的空间坐标。目前用于提高井眼轨迹拟合精度的方法主要为两种:(1)硬件条件改善。通过增加测斜点的密度,提高轨迹的拟合度和精确度。但这种方法增加了钻井测斜的成本,难以被广泛应用在实际工程中;(2)计算方法改善,也就是使用更加切合实际的井眼轨迹计算方法。虽然这种方法对计算能力有很高的要求,但是随着计算机的迅速发展,其对计算能力的需求也将逐渐被满足。
目前国内外针对提高井眼轨迹测量精度的计算方法取得了一定的研究进展。文献[4~8]假设井眼轨迹为空间斜平面内的圆弧,分别提出了用于测斜计算的最小曲率法。这些方法经过不断地改进和完善,进一步发展为空间圆弧模型。文献[9]假设井眼轨迹在垂直剖面图和水平投影图上均为圆弧,提出了曲率半径模型。由于这样的井眼轨迹被证明为圆柱螺线,因此常被各行业用作拟合轨迹的模型[10]。文献[11]假设井眼轨迹的井斜变化率和方位变化率分别为常数,提出了自然曲线模型。虽然研究人员陆续提出了多种井眼轨迹曲线的计算方法,但是上述轨迹计算方法都是假设测段为单一的井眼轨迹模型。需要指出的是,在实际钻进过程中,井眼轨迹不可能总按照某种单一的轨迹模型进行钻进,因此单一的轨迹模型会使井眼轨迹计算产生较大的误差。为了提高轨迹拟合精度,文献[6]对不同的井眼轨迹模型使用数值积分的方法进行分析,并推导出了对应模型的数值积分计算式。这种方法提高了井眼轨迹的计算精度,但是计算过程仍基于某一假设模型。随后,又有研究人员提出将测段平均分为多条直线段,再对各直线段进行特殊积分的分段式井眼轨迹计算方法[12-13]。该方法虽然对轨迹中间进行分段,但是分段方式无据可依,存在较大的主观性,使得轨迹的分段对实际轨迹曲线的匹配度较低。为解决这个问题,文献[14]提出通过工具面角对井眼轨迹模式定量识别的方法来选择符合实际井眼轨迹的轨迹模型,但该方法无法精确地判断轨迹模型。
采用上述轨迹计算方法对测段采用单一轨迹模型求取井眼轨迹,不仅精度较低,且轨迹分段的主观性较大。针对这些问题,本文提出了一种利用多种轨迹模型的特征参数来对轨迹进行模式识别和分段的方法。该方法首先利用三次b样条插值法来构建井斜角、方位角随井深变化的函数,然后分析特征参数与轨迹模型特征参数的区别,并建立模式识别与分段评价标准。
1 井眼轨迹测点邻近结构
井眼轨迹是一条光滑的曲线,轨迹上每个点的坐标都随井深的变化而变化,因此可以构建井眼轨迹的向量形式
r(L)=Ni+Ej+Hk
(1)
式中,L为井深;N、E、H分别代表南北坐标、东西坐标、垂深,单位均为m;i、j、k表示各坐标轴的单位向量。根据式(1)可知,为了研究L上任选的一点r(LP)的近邻形状,在其附近选取另一点r(LP+ΔL),根据泰勒计算式可得

(2)
当ΔL很小时,ζ趋向于0。
(3)
式中,tp、np、bp分别表示在点r(LP)的单位切向量、单位法向量、单位副法向量;k为曲线的曲率;τ为曲线的挠率。轨迹坐标增量与轨迹某点的曲率和挠率有关。
(4)
式中,kα为井斜变化率;kφ为方位变化率。从式(4)中可以看出,可由井斜变化率和方位变化率计算获得曲率和挠率,因此井斜变化率与方位变化率也能够决定轨迹曲线某点的邻近形态。
2 样条函数基础理论
井眼轨迹是连续光滑的空间曲线,在钻井过程中会存在弯曲与扭转。井眼曲率、井斜角和方位角变化率是决定井眼邻近形状的因子,可以作为判断井眼轨迹模型的参数。从力学角度分析,因受井壁的限制,钻柱可简化为一条弹性样条。从数学角度分析,随着井深的变化,井斜角与方位角可近似表达为随井深变化的函数。从钻井工程应用角度分析,用样条函数[15]模拟井眼轨迹具有高度的逼真。文献[16]的理论分析证明了样条函数在井眼轨迹分析中的可用性,说明了插值方法[17]是逼近这种函数的有效方法。
b样条函数是一种特殊的函数,是形态数学描述的主流方法之一。在钻井过程中,轨迹井斜角与方位角连续变化,且变化与高度相关。在井眼轨迹测段内,根据样条函数定义,建立井斜角与方位角样条函数方程组,如下所示
(5)

ΔLi=Li+1-Li。
式中,ΔL为井深变化量,单位为m。
对于整个井眼轨迹的n个测点,可以得到n个线性方程组。利用测斜数据可以确定θ(L)与Φ(L)的样条函数,进而可以求得每个测点井眼曲率κ、井斜变化率κθ、井眼挠率τ、方位变化率κΦ随井深的变化函数

(6)

(7)
(8)

3 模式识别及分段
3.1 空间圆弧模型
空间圆弧模型表示的是某一空间斜面上的圆弧,其曲率k为常值。图1为空间圆弧的轨迹模型示意图。

图1 空间圆弧轨迹模型示意图

(9)
式中,ki,i-1、εi,i-1分别为测点i与i-1之间测段的曲率和狗腿角;Li代表测点i的井深。由于挠率τ为偏离该平面的程度因子,所以该模型的特征参数为

(10)
式中,C为常数。
3.2 圆柱螺旋模型
圆柱螺线轨迹模型的特征是轨迹在垂直剖面图和水平投影图上的曲率为常数。在螺旋线上运动的点,由直线运动和圆周运动合成,如图2所示。

图2 圆柱螺旋迹模型示意图
当空间点从p0出发,在水平面以圆周的形式运动,同时又以等速度沿Z轴正向运动,其参数方程为

(11)
式中,r为圆周半径;v为沿Z轴的速度。
螺旋上的任意一点的位移矢量可表示为
R(s)=x(s)i+y(s)j+z(s)k
(12)
式中,s为井深;i、j、k分别为X、Y、Z轴单位向量,则螺旋线表示为
(13)
式中,L为螺距;l为一个螺距内的弧长;r为水平圆的半径,曲率和挠率如式(14)所示。
(14)
从上式可知,圆柱螺旋法的曲率和挠率为常数。曲率和挠率分别为
(15)
式中,C1、C2为常数。
3.3 自然参数法
自然参数模型的特征是轨迹的井斜角变化率和方位角变化率都为常数。将特征参数分别记为kα、kφ,其表达式为
(16)
式中,αi、φi、Li分别代表第i个测点的井斜角、方位角、井深。因此其特征参数为
(17)
其中,C1和C2为常数。
3.4 正切模型
正切法轨迹模型是假设测段为直线轨迹。因此井斜与方位变化率都为0。
3.5 模式识别标准
井眼轨迹中测点邻近点的形态可以根据测点特征参数进行描述。通过样条函数计算各测点的特征参数,对比测斜模型来识别轨迹模式。假设该测段有n个测点,根据下列算式计算出这n个测点的特征参数的平均值以及标准差。
井斜变化率的平均值及标准差为
(18)
方位变化率的平均值及标准差为
(19)
曲率的平均值及标准差为
(20)
挠率的平均值及标准差如式(21)所示。
(21)
在所述识别区间内,考虑到井眼轨迹的不同特征参数对模式识别的影响,本文采用特征参数的标准差来作为模式识别的评价标准。标准差越小,则认为该模型与实钻轨迹越接近。因为空间圆弧法与圆柱螺旋法的特征参数相同,故将空间圆弧模型与圆柱螺旋模型假设为一个模型,再通过挠率的平均值进行判断。如果其平均值接近0,则认为是空间圆弧模型;反之,为圆柱螺旋模型。
由于每种模式都有两个特征参数,为了方便叙述,分别用μ和ν来表示。空间圆弧与圆柱螺旋线模型中,μ和ν为
(22)
自然参数模型中,μ和ν为
(23)
式中,i为测段标记。
由于轨迹模型的特征参数都为常值,所以可根据标准差进行判断,标准差越小,该模型与实钻轨迹越相似。然而,每种轨迹模型都有两个评价参数,且不同参数间相互独立,有时会出现一个特征参数标准差较大,而另一个参数标准差较小的情况。考虑到各特征参数的权重,重新构造井眼轨迹模式的评价指标,即
σ=γ×μ+(1-γ)×v
(24)
式中,σ为评价指标;γ为权重系数。
空间圆弧与圆柱螺旋线的识别方法为:首先通过σ来识别空间圆弧模型与圆柱螺线模型,再根据其挠率的平均值进行筛选,从而筛选出最符合实钻轨迹的测斜模型。
3.6 数据点的前寻分段
上述过程只能判断某段的测斜方法,但在一条完整的井眼轨迹中,轨迹的形态是多变的,并不知道轨迹在何处发生变化,因此需要遍历所有的点来对全段井眼轨迹进行分段,从而避免将某段轨迹测斜方法当作全段轨迹的测斜方法。本文使用逐点前寻的方法来精确地分段。对于空间曲线,需最少用4个点来描述其形态,因此本文选用前4个测点进行模式识别。向前寻找下一个数据点带入样条函数,得出其特征参数,并判断这一点的特征参数误差是否在标准差内。若满足式(25),则继续测试下个测点;若不满足条件,则判断上一点为分界点,并以上一点为初始点重新选择测斜模式。该方法能够最大限度地进行分段,并求取某段的测斜模式。
假设当前测段所计算的特征接近某种模型,其特征参数为kα和kβ,通过样条函数求出下一点的kα,p和kβ,p,并根据以下计算式进行判断。
(25)
如果满足上述条件,则认为此点也在该测段上,如果不满足,则需重新分段。
拟合算法的具体步骤如下:
步骤1输入测点的测量数据,将其带入样条函数,求出各特征参数随井深的变化函数;
步骤2选取前4个点来判断轨迹模式;
步骤3向前读取下一测点的特征参数,判断其是否满足误差。若满足,则继续读取下一点;若不满足,则以上一点为起始点,返回步骤2重新判断轨迹模式;
步骤4直到最后一点读取完成,结束循环。
4 模拟实验与分析
通过随钻测量样机设备进行模拟实钻实验。样机与实际随钻测量设备功能相同,仅在尺寸和材质上有所缩减。为了能够清楚地描述实验结果,按照样机与实际钻井设备的比例,将采集数据中井深与坐标增量进行1∶10的比例尺换算(以换算为实钻数据进行分析)。为了模拟实钻,在实验时,样机设备按照设计的轨迹方向钻进,在一定的井深做出一些增斜或降斜操作。样机设备每隔约100 s停钻,在此时采集静态测量数据,用以模拟实际钻井过程中的停钻状态。模拟实验期间,共进行30次停钻操作。选取钻进过程中100~400 m的测段进行算法分析。样机设备采样频率设为50 Hz,在钻进的过程中采集加速度及地磁数据,并换算成井斜角、方位角及井深。
首先将测段中井斜角、方位角和井深带入式(5)以求取轨迹基本参数,计算测点参数的平均值以及标准差,如表1所示。然后,根据各参数求出井眼轨迹的各基本参数的平均值以及标准差,如表2所示。
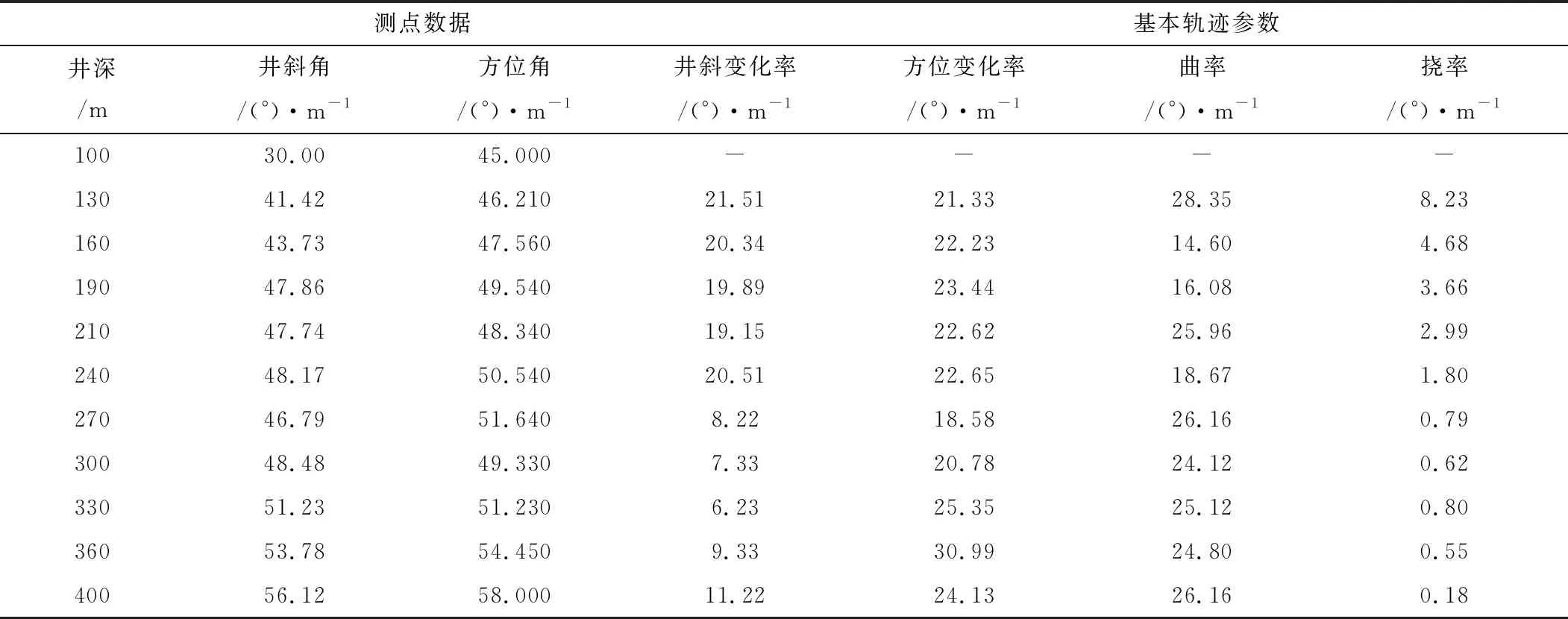
表1 轨迹基本参数

表2 参数的平均值以及标准差
根据分段点选取原则,选择前4个点的特征参数带入模式识别评价方程,得到每个模式的评价标准,如表3所示。

表3 模型评价参数1
由于评价标准越小,井眼轨迹越接近该标准下的轨迹模型,所以根据前4个测点可判断该测段为自然参数模型。
由于在270 m时计算获得的井斜变化率以及方位变化率的值大于评价指标,因此可以判断上个测点为分界点。如果不对井眼轨迹进行分段,仍继续使用自然参数模型,并将该点带入计算,将发现其标准差变化很大,因此本文所提出的分界方法是有效的。
对分界点后的轨迹进行上述分析,计算各模型的评价指标,如表4所示。根据识别标准判断剩下的轨迹与空间圆弧法或圆柱螺线法之间的关系。由于挠率的平均为0.45,基本接近0,所以判断为空间圆弧法。

表4 模型评价参数2
表5以绝对误差为判断依据,表明通过对轨迹进行分段与模型识别能够提高轨迹计算的精度。

表5 轨迹误差
根据单一轨迹与本文所用方法描绘井眼轨迹图,如图3所示。从图3可以看出,相比单一井眼轨迹,采用本文所提方法绘制的轨迹更接近参考轨迹。

图3 井眼轨迹的三维图
5 结束语
测段采用单一轨迹模型求取井眼轨迹时精度较低,且轨迹分段的主观性较大。针对该问题,本文从理论角度分析了三次b样条的适用性,通过该方法计算出井眼轨迹中各参数随井深的变化函数,然后构建模式识别与分段方法,通过识别方法判断该测段最适合的模型,再利用数据点前寻法遍历所有轨迹测点对其进行分段。本文设计了随钻测量样机设备的模拟钻进实验。实例误差分析和轨迹图分析证明了本文提出的基于特征参数的井眼模式识别和分段方法的有效性。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
石油机械(2022年4期)2022-04-13
油气·石油与天然气科学(2021年12期)2021-12-11
油气·石油与天然气科学(2021年6期)2021-09-10
当代化工(2020年11期)2020-12-17
初中生世界·九年级(2020年9期)2020-09-21
东方教育(2016年9期)2017-01-17
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年20期)2016-09-29
软件导刊(2015年1期)2015-03-02
