
基于行为的智能塔机路径规划算法与动态避让策略
2022-10-19 01:26陈飞军贺俊刘栋杨静
建筑机械化 2022年10期
陈飞军,贺俊,刘栋,杨静
(1.杭州品茗科技股份有限公司,浙江 杭州 310015;2.西安理工大学,陕西 西安 710077)
随着科技的发展,智能技术在建筑起重机械中的应用已经纳入国家《工程机械行业“十四五”发展规划》中,振华重工(ZPMC)的全自动装卸系统,应用最先进的物联网和互联网技术,将人从危险,重复性的工作中解脱出来,实现无人吊装,因此,利用人工智能技术降低建筑施工的劳动力成本,是一个重要的方向[1]。塔机是建设房屋和桥梁的主要吊装工具,由于高空作业,司机劳动强度大,容易疲劳,是施工现场重大安全隐患之一,实现塔机的无人控制一直是人们最求的目标。早在20 年前就已经开始使用塔机地面遥控系统,然而,由于塔机在执行吊运任务时,空间运行范围大,受信号传输以及遥控人员仰视视角的影响,塔机的遥控只适用于高度不超过20m的现场[2]。随着智能化时代的到来,无人驾驶技术以及机器人控制技术为塔机无人驾驶提供了技术支撑[3-6]。路径规划域跟踪是实现塔机无人驾驶的关键技术,目前,国内外研究机构及学者对吊装的路径规划做了大量的研究[8],邓乾旺[9]等人采用多目标的遗传算法进行吊装路径寻优;张恩东[10]以RRT 算法为基础,对其进行动态改进,描述了具体的吊装路径智能计算的框架,提高了施工效率;朱乐民[12]着眼于静态路径向运动函数转变的环节,利用多目标进化算法对运动函数做优化。然而,现有的研究方法是以现场精确的三维模型为基础,主要考虑静态避障问题,而且路径规划借鉴机器人的算法,难以快速收敛。考虑塔机在施工现场特殊的作业环境,塔机的路径与普通机器人不同,在塔机完成吊装作业过程中,除了避免各种误操作、静态障碍之外,还要处理各种空间突发碰撞风险,而目前的报告中都没有研究塔机吊运的动态避让问题。本文基于塔机行为以及工况特点,借鉴塔机驾驶员的操作经验,研究塔机路径规划以及空间碰撞避让算法,为实现塔机无人控制提供基础。
1 塔机工况与全局路径规划
塔机通过转动、变幅以及吊钩起升3 个行为将物料从料场吊运到施工作业面,其吊装作业一般包括起吊、变幅、回转、落钩4 个过程。在施工现场,塔机一般比较高,塔机吊装的起吊与落钩过程主要关注吊载对周边建筑或施工人员产生的碰撞;而塔机的变幅以及回转过程则是塔机大范围运动实现物料起升到达施工作业面后到达目标位置;在此过程,塔机行为受行程限位、力矩限制、吊钩运行限制区域以及静态障碍等的约束。塔机路径规划是在各种复杂约束下,规划塔机的变幅以及回转行为实现大范围吊运任务。
塔机转角限制约束塔机转动的范围;力矩限制则是根据塔机的载荷约束其变幅运动,避免塔机发生倾翻事故;静态障碍是施工作业面上可能与塔机发生碰撞的静止物体,比如,停止在可能碰撞区域的协同作业塔机,或者施工现场限制塔机吊钩进入的吊钩限行区域等。综合考虑塔机工作空间各种静态障碍以及各种行为约束,塔机的路径规划按以下两步进行。
1.1 第一步:转向确定
塔机从起吊位置到落钩位置,其转动方向主要受制于转角限制以及静态障碍,当不存在上述约束,则选择转动角度小的方向。图1 是智能塔机的转向确定流程图,首先由转角限位,直接确定转向;如果没有转角限位,则判断是否有静态障碍,如果有,则放弃该方向;最后,在没有转角限位,以及静态障碍的前提下,根据塔机转动角度小的方向确定转向。

图1 塔机转向确定
1.2 第二步:吊钩避让限行区域,并形成规划路径
吊钩限行区域为限制塔机吊钩进入的区域,在施工现场一般通过多边形来设置限行区域。在塔机转向确定后,变幅行为首先保证避开吊钩进入限行区,同时,确保塔机在转动过程力矩小,从而减小吊钩摆动。
智能塔机吊钩避开限行区域流程如图2。判断塔机转动方向是否有限行区域;如果无限行区域,再判断起吊点的幅度与落钩点的幅度,如果起吊点的幅度大于落钩点的幅度,则塔机先变幅到落钩点的幅度,再转动;如果有限行区域,则找到该限行区域所有顶点幅度最小值,如果塔机当前小车幅度大于限行区域幅度最小值,则吊钩先变幅运动到幅度小于限行区域顶幅度最小值的位置,然后再转动。
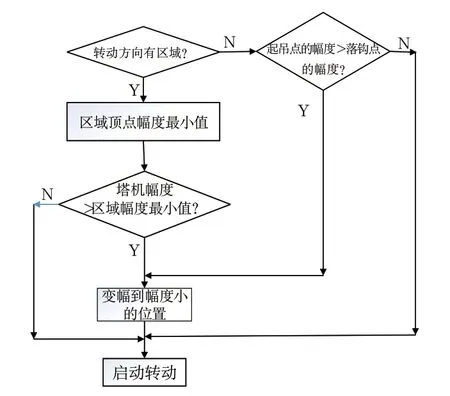
图2 吊钩避开限行区
设某施工工况如图3,在塔机的工作范围有转角限位θ1~θ2,且有1 个三角形吊钩限行区域,3 个顶点为1,2,3;塔机的起吊点A(RA,θA)落钩点B(RB,θB)。根据上述塔机路径规划方法,由于转角限位在A点的右侧,所以塔机的转向只能左转;在左转范围内,有三角形吊钩限行区域,该限行区域的最小幅值点为1点,该点幅度小于起吊点的幅值RA,为了避让限行区域,塔机的运行路径需要先变幅运动到小于限行区域顶点1 的幅值,于是,规划出该工况下,塔机的全局路径,如图3 中的实线,从起吊点A出发先变幅运动到C点,然后塔机转动到D点,最后,从D点变幅运动到落钩点B。

图3 塔机路径规划案例
2 塔机动态避让策略
在大型建筑施工过程中,多塔机协同作业存在碰撞风险,而塔机的碰撞是突发的,塔机在路径跟踪过程中,当发生碰撞风险,塔机需要进行动态碰撞避让。由于起重臂惯性大,塔机在大范围回转运动时,频繁启动会对塔机会产生较大的冲击载荷,还会引起吊钩大幅摆动,为了尽量减少操作不当导致的运动冲击,塔机驾驶员在实际操作中,针对运动塔机或带载塔机,会采取不同的避让策略,总结驾驶员的动态避让行为经验:①动塔让静塔;②高塔让低塔;③轻载让重载;④后进让先进,即碰撞区域外的塔机要避让已经进入碰撞区域的塔机。
基于上述经验行为,图4 给出了当塔机发生碰撞风险,智能塔机动态避让的策略:如果与本机发生碰撞的塔机静止,则本机主动避让,本机高,则采取变幅避让行为,直到吊钩退出碰撞区域;本机低,则采取反向转动退出碰撞区等待;如果与本机发生碰撞的塔机在运动,则根据“后进让先进的原则”,如果本机不在碰撞区域,则本机等待碰撞危险解除;如果本机在碰撞区域,发生碰撞的塔机不在碰撞区,则本机继续运动;发生碰撞的塔机也在碰撞区域,则按“轻载让重载”,以及“高塔让低塔”的原则,轻载塔机高则变幅避让,轻载低则反转退出碰撞区避让。

图4 塔机动态避让流程
3 仿真分析
图5 为某施工现场2 台存在碰撞风险的塔机TC1 与TC2,TC1 高;TC1 的工作范围有1 个角度限位区θ1~θ2,以及1 个三角形限行区域(顶点为1、2、3);TC2 的工作范围内没有静态障碍。
图5a给出了塔机TC1 以及TC2 的初始位置,设塔机TC1 需要从起吊点A 处将物料吊运到落钩点B处,塔机TC1 首先进行全局路径规划。根据智能塔机路径规划算法,为了避开角度限制区θ1-θ2,塔机TC1 选择左转方向;左转范围有三角形限行区域,而起吊点A 的幅度RA小于限行区域的最小幅值,同时,塔机TC1 不在碰撞区域,于是,塔机TC1 规划的全局路径如图5a 的中的点划线所示,塔机TC1 的路径为将先转动,吊钩从A 位置到达C 位置,然后变幅运动,吊钩到达目标B 位置。
随后,塔机TC1 开始轨迹跟踪,当塔机TC1到达位置D 如图5b,塔机TC1 的安全防护功能模组监测到TC1 与TC2 有碰撞危险,此时,塔机TC2 在L 位置,处于碰撞区域内。根据 “后进让先进“的碰撞避让原则,塔机TC1 将会在D位置停止等待;塔机TC2 则继续运动,直到塔机TC1 检测不存在碰撞风险,TC1 才会继续转动,直到位置C,然后再变幅到落钩点B 位置,完成此次路径跟踪。

图5 塔机动态避让
4 结语
针对塔机复杂工况下的各种限制以及静态障碍约束,以及群塔协同作业可能出现的空间突发碰撞情况,结合塔机行为特点以及驾驶员的行为经验,本文提出基于行为的路径规划算法,以及动态碰撞的避让控制策略,提高了算法的实时性,保证了塔机运行的稳定性,通过实测,本文的控制算法满足复杂作业环境下塔机智能控制要求,为塔机的智能控制提供了技术支撑。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
中国新技术新产品(2022年5期)2022-06-21
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
科学与财富(2021年34期)2021-05-10
阅读(低年级)(2019年4期)2019-05-20
魅力中国(2018年5期)2018-07-30
科学与财富(2017年24期)2017-09-06
科技创新导报(2016年4期)2016-11-19
