移动并联多功能农业机器人机构设计与仿真*
2022-10-20 14:59王志远胡杨树
南方农机 2022年20期
王志远 , 康 杰 , 顾 懿 , 胡杨树
(三江学院机械与电气工程学院,江苏 南京 210012)
0 引言
我国农业在国民经济中占据着非常重要的地位[1]。在植保喷药领域,传统的人工喷洒农药模式费时费力,且受天气和地形等因素的影响较大。在喷洒农药时,作业人员存在着农药中毒的风险[2]。随着农业现代化进程的加快[3-5],国内外很多地方逐渐使用植保无人机喷洒农药,此模式虽能解决人力作业存在的安全性不足和劳动力短缺等问题,却又带来了农药浪费、影响健康等新问题。
目前国内对具有精准喷洒功能的农业机器人的研究还很欠缺,但对并联机构和喷雾装置的研究却不少。樊正强等[6]论述了农业机器人常见的行进方式,并对各种行进方式的优缺点和控制方法的稳定性进行了分析。马智斌[7]提出了一种并联式自动采茶机,基于Delta机器人,利用机器视觉技术能够实现茶叶采摘。张强[8]研究的多功能农业机器人具有可互换的各功能模块结构,能够完成旋耕、播种作业和除草作业。混联机器人在此领域中更是凤毛麟角。农作物幼苗较脆弱,且易受到外加的压力影响而产生变形或者断裂,因而需要农业机器人本身具备很高的灵活性和智能化水平[9]。本文提出并设计了一种移动并联农业机器人,其并联机构和移动平台的结合恰恰满足要求。二者实现了功能互补:并联机构具有刚度大、承载能力强、精度高、末端件惯性小等一系列优点,而移动平台具有全方位移动的特点,恰好可以弥补并联机构不能移动这一缺点,二者结合为农作物精准作业研究、节省能源提供了一种新的思路。
1 总体设计方案
总体设计方案流程如图1所示。第一步通过农作物幼苗及杂草的高度确定底盘的高度;第二步根据需要的工作空间的范围并结合并联机构的静力学分析,来确定并联机构主动杆和从动杆的长度尺寸及材料;第三步通过SolidWorks对整体结构进行建模,绘制出具体的三维模型;第四步对主要部件进行有限元仿真分析,以确定其强度能够支持机器人平稳运行;第五步根据设计要求进行农业机器人整体的实物制作与实验。

图1 总体设计方案流程图
2 运动学分析
考虑到本设计主要是在目标物上方,利用水平工作空间进行定位喷灌,对垂直空间的要求并不是很高,所以在满足所需空间时,以包络一个最大圆柱体(h×D)为目标来设计各杆件的尺寸[10]。该圆柱体空间即为单个并联机构的任务工作空间。在接下来的分析中,先进行单个并联机构的工作空间分析。为更好地得到任务工作空间的表达式,采用解析法,将三维图简化成二维图,进行工作空间分析,如图2所示。

图2 并联机器人二维工作空间简图
首先可以给定一个h作为任务工作空间的高,给定一个H作为任务工作空间距离静平台的距离,给定一个D作为圆柱形任务工作空间的直径。可以得到末端执行器的可达任务工作空间上界限和下界限的数学方程,如式(1)和式(2)所示。

主动杆L1向上运动,一直运动到极限角度θmin,此时从动杆处于竖直状态,动平台中心点P在可达任务工作空间的上界限。因此,主动杆L1与从动杆L2满足以下等式:

空间直径D为:

静平台与动平台的半径差d的约束条件为:

给定圆柱任务工作空间直径D为400 mm,高h为100 mm。圆柱任务工作空间上边界与定平台距离H为400 mm。已知定平台外接圆半径R为183 mm,动平台外接圆半径r为34 mm,静平台与动平台的半径差d为149 mm。根据公式(3)(4)(5),可以计算出主动杆长度L1为142 mm,从动杆长度L2为499 mm。并联机构结构参数如表1所示。

表1 并联机构结构参数
根据约束条件公式对并联机构主动杆和从动杆的长度计算分析,并结合实际喷灌作业的需求提出了理想的任务工作空间,同时进行逆向运动学分析。最后利用MATLAB软件对并联机构的末端执行器运动轨迹进行仿真验证,经过仿真验证可知,单个并联机构末端执行器的空间移动范围大于所需的任务工作空间范围。如图3长方形框所示,可以更加明显地看出单个并联机构的工作空间包含了圆柱形状的任务工作空间。同理可知,当有两个并联机构时,整个农业机器人的工作空间为两个互不干涉而且边缘相互触碰的圆柱体。
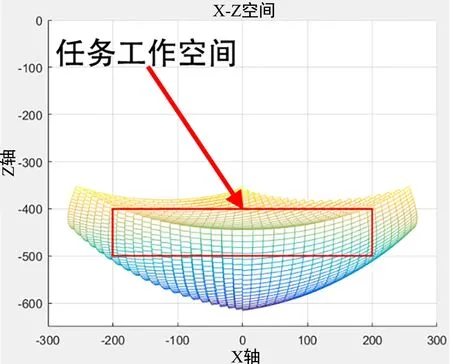
图3 工作空间仿真与验证
3 机械结构设计
农业机器人三维建模图如图4所示。该农业机器人能够在田间对目标农作物进行精准灌溉。其具有能够全方位移动的底盘,移动到作业地点后,并联机构的动平台及末端执行器能够快速准确地定位到农作物幼苗上方位置,通过安装在末端的喷雾灌溉装置对目标位置的农作物进行喷洒灌溉,随后末端执行器再移动到下一个农作物幼苗上方位置,以此循环作业。
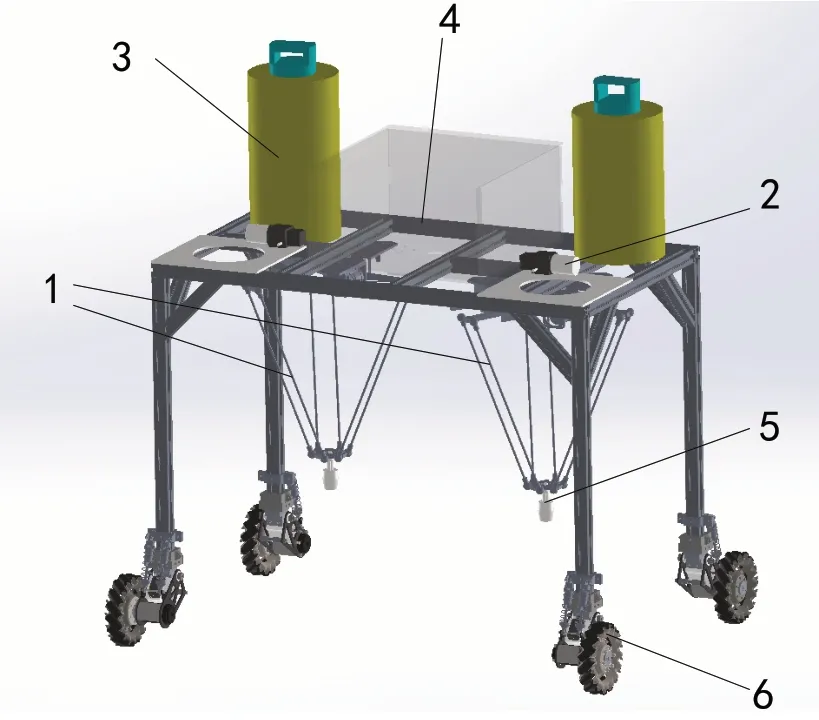
图4 移动并联多功能农业机器人三维建模图
3.1 并联机构设计
并联机构模块主要由动平台、定平台、主动杆、从动杆、球铰、L型支架、磁编码器固定件和电机构成,如图5所示。
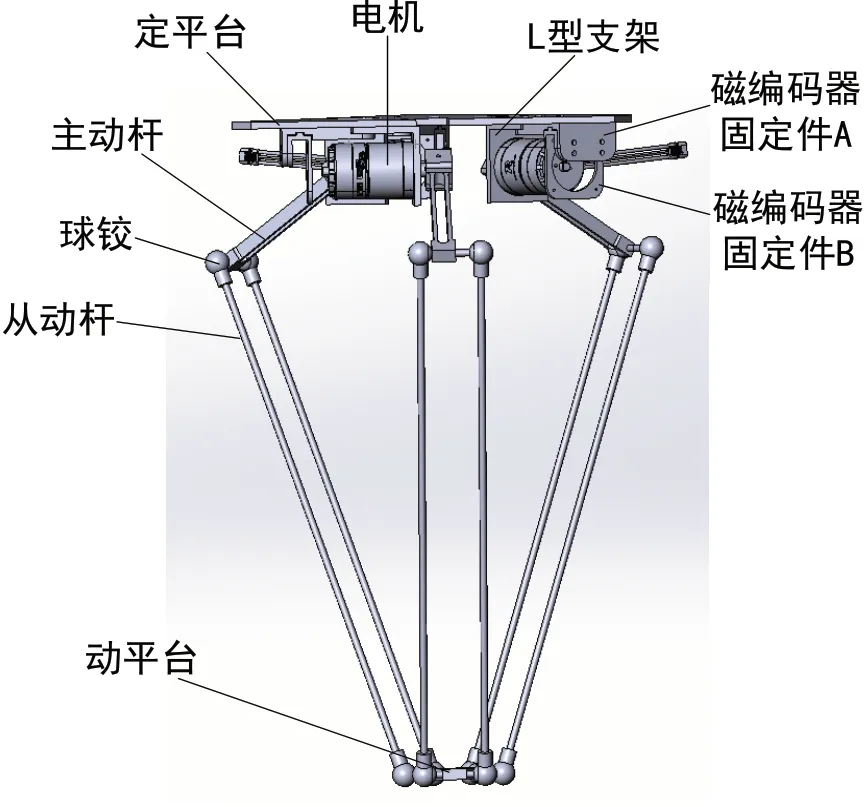
图5 并联机构模块
3.2 外部框架设计
为了保证较强的通过性,框架采用四条腿的形式,即用四根铝型材与轮系相连接。这种结构在田间作业时有很强的通过性,直行或者侧向行驶时都能极大程度地避免与农作物的碰撞接触。
3.3 移动底盘设计
农业机器人的工作环境是凹凸不平的农田,在田间作业时平稳性较差,会产生大振幅振动。为保证农业机器人平稳行驶,减小对联轴器的径向弯曲应力,延长联轴器的使用寿命,需要设置合适的避震装置。相比其他移动机构,该移动底盘结构简单,且对田间土地的破坏最小。
3.4 轮系及包覆机构设计
为了将电机、避震器和框架合理连接,设计一种包覆机构,如图6所示。其主要由两块悬挂侧板和三个垫块组成,两个悬挂轴承座垫座包覆住电机,两块侧板上用一根螺栓固定住避震器。
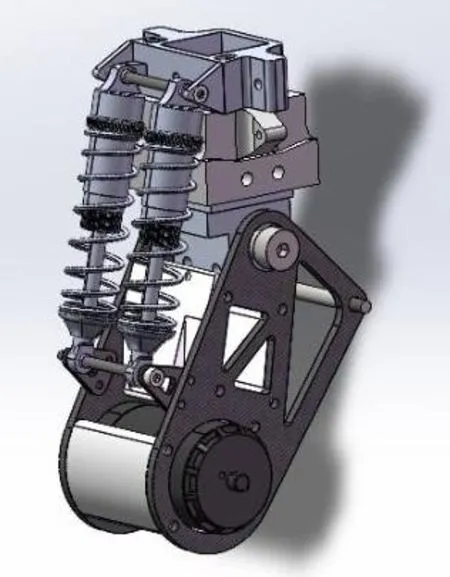
图6 电机包覆机构三维建模图
轮系爆炸图如图7所示,主要由螺栓、压紧帽、麦克纳姆轮、联轴器、悬挂轴承座、挡边轴承、悬挂侧板、悬挂轴承座垫座、光轴座、铝方管、避震器固定件、40转30连接件、避震器、电机、悬挂垫块等组成。

图7 轮系爆炸图
4 有限元分析
作为并联机构中的关键部件,主动杆起到连接电机和从动杆的作用,主要承受从动杆、动平台以及末端执行器的重量。为验证主动杆强度是否可靠,需进行有限元分析。据静力学分析可知,在从动杆垂直位置时,主动杆受力最大。由此可通过Ansys Workbench进行有限元分析。首先将建立的主动杆三维模型导入到Ansys Workbench中,对该模型进行材料设置,可知主动杆受到从动杆、动平台和喷头的重力,合计为10 N。其次设置主动杆末端的拉力为10 N,然后进行求解,结果如图8、图9、图10所示。

图8 主动杆总形变

图9 主动杆等效应力
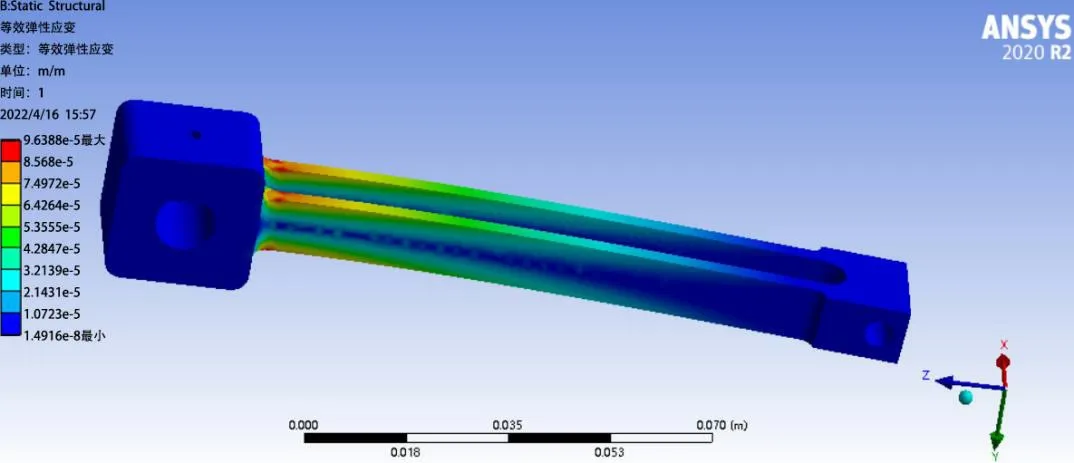
图10 主动杆等效弹性应变
可以看出,主动杆最大总形变为0.06 mm,主动杆最大等效应力发生在主动杆与电机轴连接一侧的开槽处,为6.9 MPa,最大等效弹性应变也发生在主动杆与电机轴连接一侧的开槽处,为0.000 1 m/m。形变均处于合理的范围内,因此主动杆设计合理,能承受住工作时的所承担的力。
5 实物装配与实验
将各个部分依次实物化,并进行合理组装。实验部分主要进行移动平台实验和农作物定位模拟实验。
5.1 移动平台实验
为验证农业机器人的移动能力和速度,在地上贴了一条黄色测试标签。农业机器人从起点出发进行直线行驶,通过计算,行驶速度为0.5 m/s。同时,为验证其侧向移动的优越性,对其转弯能力进行测试,速度约为0.3 m/s,可以发现这样的侧向移动并不会像普通轮子转弯那样导致工作盲区。移动平台实验验证了农业机器人具备灵活的行走能力,不管是直线行驶还是侧向行驶都具有很强的通过性,而且行驶的速度和稳定性都符合预期。农业机器人直线行驶和侧向行驶测试现场实物图如图11至图14所示。

图11 直线行驶移动起始点
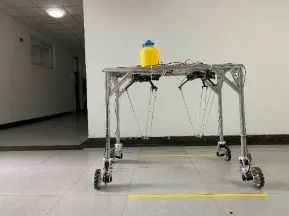
图14 侧向行驶移动终点

图12 直线行驶移动终点
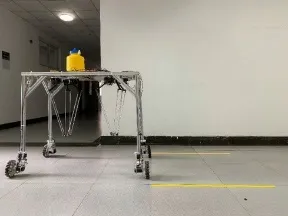
图13 侧向行驶移动起始点
5.2 农作物定位模拟实验
按照设定好的程序,对目标农作物进行定位模拟实验,机器人运动到农作物正上方后,双并联机构同时快速对目标农作物进行标定,且准确无误,实验效果如图15、图16所示。农作物定位实验验证了农业机器人作业的特点,能够精准快速地定位到农作物上方。

图15 双并联机构同时标定实验图

图16 双并联机构同时标定实验俯视图
6 结束语
课题组研制的移动并联农业机器人机构,结合移动平台和并联机构各自的优势,应用于农业灌溉作业。本机构兼顾移动平台出色的全方位移动能力,双Delta并联机构能够轮流或并行操作提高效率。结果表明,课题组研制的移动并联农业机器人可以有效实现稳定行走和精准定位喷洒作业,与人工喷洒农药和植保机覆盖式喷洒相比,本设计的优势尤其明显,各项资源均被有效利用,有利于节能减排。
猜你喜欢
今日农业(2022年16期)2022-11-09
今日农业(2022年15期)2022-09-20
今日农业(2022年13期)2022-09-15
电机与控制学报(2018年9期)2018-05-14
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
作文周刊·小学一年级版(2016年14期)2016-05-10