
风扰动下固定翼无人机指令滤波反步着陆控制
2022-10-25 12:13徐子琴
计算机仿真 2022年9期
徐子琴,雷 明
(上海交通大学航空航天学院,上海 200240)
1 引言
无人机凭借其成本低、机动性强、灵活可靠等优势,被广泛应用于民用和军事领域,其中固定翼无人机的应用最为广泛。在固定翼无人机的任务飞行过程中,着陆阶段是最为关键且容易发生事故的一个阶段。统计数据表明,近一半的飞行事故发生在着陆阶段。因此,设计一种控制性能好、精度高的自动着陆控制器显得尤为重要。然而,自动着陆控制器的设计面临着许多挑战,如无人机存在模型不确定性以及在着陆期间会受到外部风干扰的影响等。这些因素为着陆控制系统的设计带来了很多困难,也吸引着众多学者进行研究。
近年来,许多控制方法被应用于自动着陆控制研究中。文献[3]利用经典的PID控制方法设计了固定翼无人机着陆控制器。文献[4]采用H控制方法设计了一种级联结构的自动着陆控制器,实现了在大侧风环境下的安全着陆。文献[5]针对固定翼无人机设计了一种微分形式的H控制器,能够抑制一定程度的外界风扰动的影响,实现安全着陆。上述文献都是基于小扰动线性化模型进行控制器设计的,由于实际模型的非线性,往往需要进行增益调度设计,使得设计过程非常繁琐。采用非线性控制方法可以大大简化设计过程,文献[6]设计了一种非线性动态逆自动着陆控制器并通过神经网络对系统中的扰动进行估计。文献[7]利用滑模控制方法为高攻角试验机设计了自动着陆控制律并与PID控制方法进行对比,结果表明滑模控制方法具有良好的控制效果,但文中未考虑风干扰的影响。
反步法是一种重要的非线性控制方法,因其系统化的设计过程在非线性控制领域被广泛应用。然而反步法的鲁棒性不够强,通常需要与其它控制方法进行结合以增强鲁棒性。文献[8]针对飞机纵向动力学模型设计了一种自适应反步控制器,实现了在气动参数不确定下准确跟踪航迹角指令与空速指令。文献[9]利用自适应反步控制方法对参数不确定下高超声速飞行器的纵向运动进行控制。此外,传统反步法存在“微分爆炸”问题,为此,Swaroop等提出了“动态面控制”方法,利用低通滤波器来获取虚拟控制律的微分信号。然而,低通滤波器产生的时间延迟可能会导致系统发散。此外,跟踪微分器、滑模微分器以及指令滤波等方法也常被用于解决“微分爆炸”问题。其中,指令滤波法能在滤波的同时中引入幅值、速率和带宽约束,对虚拟控制输入与实际控制输入信号进行约束限制,满足实际控制系统的需求。
本文针对固定翼无人机着陆期间的飞行环境存在模型不确定及风干扰的情况,设计了有限时间扩张状态观测器对复合干扰进行快速精确估计,提高了控制系统的鲁棒性,避免了文献[8,9]中将反步控制方法与自适应控制方法结合可能引起的参数漂移现象;将有限时间扩张状态观测器与反步控制方法进行结合设计了高度控制器以及空速控制器,相比于文献[3-5]采用的线性控制方法,无需进行增益调度设计,简化了设计过程;通过指令滤波器求取虚拟控制量的微分信号,解决了“微分爆炸”问题,在一定程度上简化了控制器;最后,通过仿真对比验证所设计控制策略的有效性。
2 无人机动力学模型
固定翼无人机在着陆时可能遭遇阵风等风干扰,由于无人机着陆时的空速较低,显然风干扰会对无人机的运动产生较大影响。因此,为研究风干扰下的固定翼无人机自动着陆控制问题,首先应尽可能准确地建立固定翼无人机在风干扰下的非线性动力学模型。固定翼无人机的动力学模型为


(1)

(2)


(3)

(4)

(5)


(6)

(7)
式中:为升降舵偏转角;为奥斯瓦尔德效率因子;=为机翼的展弦比,为翼展;、、为气动导数。
3 控制器设计
3.1 控制目标
针对固定翼无人机的纵向自动着陆控制问题,将无人机的纵向动力学模型分为空速子系统以及高度子系统,对这两个子系统分别设计控制器,其中空速控制器用于控制无人机的空速在着陆过程中始终保持不变,高度控制器用于控制无人机的高度在着陆阶段始终能稳定跟踪高度指令。本文将结合有限时间扩张状态观测器和指令滤波反步法设计纵向自动着陆控制器,保证无人机的空速和高度在着陆过程中稳定跟踪其参考指令。控制系统框图如图1所示。

图1 纵向着陆控制系统框图
3.2 有限时间扩张状态观测器设计
无人机的空速子系统以及高度子系统均存在模型不确定性以及风干扰的复合干扰。为了削弱复合干扰带来的不利影响,引入有限时间扩张状态观测器对复合干扰进行估计与补偿。考虑如下非线性系统

(8)


(9)


(10)


(11)

3.3 空速控制器设计
本节基于动态方程式(1),即空速子系统进行控制器设计。采用32节介绍的有限时间扩张状态观测器估计空速子系统中的复合干扰,在此基础上,利用反步控制方法设计控制输入保证着陆过程中空速保持不变。空速子系统可表示为

(12)
式中

(13)
定义空速跟踪误差=-,其中为空速指令,对进行求导可得

(14)
设计控制输入为

(15)


(16)

3.4 高度控制器设计
本节基于固定翼无人机动力学方程(2)-(5),即高度子系统进行控制器设计。与空速控制器的设计方法类似,采用有限时间扩张状态观测器对高度子系统中的复合干扰进行估计,并基于反步法设计控制器。由于高度子系统是4阶的,利用反步法设计控制律时,对空航迹倾斜角、俯仰角和俯仰角速率这三个状态量是作为虚拟控制输入的,在进行下一步虚拟控制律设计时需要用到前一步虚拟控制律的导数信息,然而固定翼无人机动力学模型中的非线性和不确定性使得求取虚拟控制输入的导数信息时需要大量的计算,即导致所谓“微分爆炸”问题。为了解决这个问题,本文将采用指令滤波器获取虚拟控制输入的导数信息。
指令滤波器可以表示为如下状态方程形式

(17)

高度子系统可以表示为

(18)
其中

(19)


(20)
高度子系统为4阶系统,需要通过四步设计环节完成控制器的设计。
步骤一:设计虚拟控制输入
定义高度跟踪误差为=-,其中为高度指令,为使跟踪指令信号,选择对空航迹倾斜角作为虚拟控制量。对进行求导可得

(21)
指令可设计为

(22)

(23)

为了避免下一步设计环节中对虚拟控制量进行求导运算,引入如下指令滤波器

(24)

定义补偿跟踪误差系统

(25)
式中:、为指令滤波器的误差补偿信号,将在步骤二中进行定义。
步骤二:设计虚拟控制输入
定义航迹角跟踪误差为=-,,为使跟踪指令信号,,选择俯仰角作为虚拟控制量,对进行求导可得

(26)
指令可设计为

(27)
(28)

同样为了避免下一步设计环节中对虚拟控制量进行求导运算,引入如下指令滤波器

(29)

定义补偿跟踪误差系统

(30)
式中:、为指令滤波器的误差补偿信号,将在步骤三中进行定义。
步骤三:设计虚拟控制输入
定义俯仰角跟踪误差为=-,,为使跟踪指令信号,,选择俯仰角速率作为虚拟控制量。对进行求导可得

(31)
指令可设计为

(32)
式中:>0为待设计的控制增益。
引入如下指令滤波器获取虚拟控制量的导数信息

(33)

定义补偿跟踪误差系统

(34)
步骤四:设计控制输入
定义俯仰角速率跟踪误差为=-,,对进行求导可得

(35)
控制输入可设计为

(36)

(37)

4 稳定性分析
对于纵向自动着陆控制系统,选取Lyapunov函数

(38)
对求导可得






(39)

根据Young’s不等式可得


(40)
由(39)式与(40)式可得



(41)


≤-+
(42)
式中



(42)式的解为

(43)

5 仿真结果与分析
5.1 仿真参数设置
固定翼无人机的纵向着陆过程分为进场平飞、直线下滑以及指数拉平阶段。在进场平飞段,无人机的高度保持不变;在直线下滑段,无人机沿倾斜角为-3°的直线下滑;在指数拉平阶段,无人机沿指数曲线下滑,拉平决策高度为15。无人机的空速在着陆过程中始终保持不变。本文设计无人机着陆时的空速指令为=35,高度指令为

(44)
在仿真零时刻开始,施加如表1所示参数不确定性

表1 仿真中施加的参数不确定性
仿真环境设置为图2所示根据美军标--8785设定的阵风干扰,其在惯性地面坐标系的轴和轴负方向的分量如图所示。
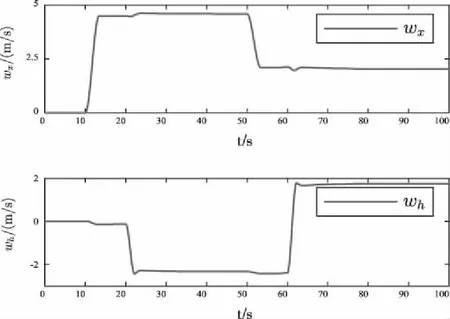
图2 阵风干扰
为了验证本文所提控制方法的有效性,对如下两种控制方法进行仿真对比。
方法一:本文所提出的基于有限时间扩张状态观测器的指令滤波反步方法。有限时间扩张状态观测器参数设计为β=β=β=β=3、β=β=β=β=7、γ=γ=γ=γ=0.6;控制器参数设计为k=0.5、k=0.8、k=2、k=2、k=4;指令滤波器参数设计为ζ=ζ=ζ=0.8、ω=ω=ω=10。
方法二:采用控制方法的纵向着陆控制方案
1)高度控制律


2)空速控制律

其中,k=0.027、k=0.005、k=-6.7、k=-12.5、k=0.88、k=0.5、k=0.03。
5.2 仿真结果分析
仿真结果如图3~12所示,图3为无人机的高度跟踪曲线,图4为无人机的高度跟踪误差曲线,图5为无人机的空速跟踪曲线,图6为无人机的垂直下降速度曲线,图7~10为采用本文所提出的控制方法时各子系统通道的实际干扰与有限时间扩张状态观测器的干扰估计值曲线。图11,12分别为升降舵偏转角以及油门开度曲线。

图3 高度跟踪曲线

图4 高度跟踪误差曲线

图5 空速跟踪曲线

图6 垂直下降速度曲线

图7 空速通道干扰曲线

图8 高度通道干扰曲线
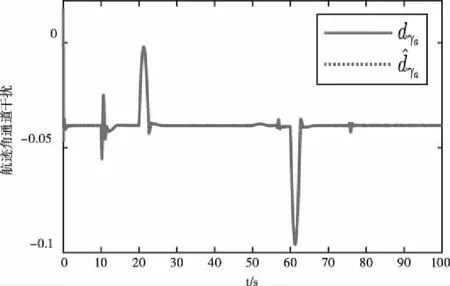
图9 航迹角通道干扰曲线

图10 俯仰角速率通道干扰曲线

图11 升降舵偏转角

图12 油门开度
本文所提出的控制方法采用了有限时间扩张状态观测器估计模型不确定性与风干扰的复合干扰,由图7~10可知,各通道的干扰估计值与实际值曲线基本重合,有限时间扩张状态观测器实现了对复合干扰快速而有效的估计。
从图2所示阵风干扰曲线可以看出,风干扰在10、20、50、60时发生突变,对无人机的高度与空速跟踪性能会产生较大影响。从图3、4所示的高度跟踪曲线以及高度跟踪误差曲线可以看出,采用本文所提出的基于有限时间扩张状态观测器的指令滤波反步控制方法时,无人机的高度很好地跟踪了参考指令信号,整个着陆过程中的最大高度跟踪误差仅为092。从高度跟踪误差曲线的变化趋势可以看出,无人机的高度跟踪误差会在第10、20、50、564、60时开始增大随后在控制器作用下又逐渐减小。第10时无人机的高度指令由平飞切换为直线下滑;第20时风干扰快速变化到-25左右;第50时风干扰快速减小到2;第564时无人机的高度指令由直线下滑切换为指数拉平;第60时风干扰由-25左右快速变化到接近2;这些变化对无人机的高度指令跟踪会产生较大的影响,无人机的高度跟踪误差相应地也在这些时刻开始增大。采用控制方法时,无人机的高度跟踪误差变化趋势与本文所提出的控制方法类似,但高度跟踪误差相比本文提出的控制方法较大,最大高度跟踪误差超过了3。
从图5所示的空速跟踪曲线可以看出,采用本文所提出的控制方法时,无人机的空速很好地跟踪了参考指令信号,最大空速跟踪误差仅为002,无人机的空速跟踪误差会在第10以及第50时增大,这是由于第10以及第50时风干扰的大小开始迅速变化,导致空速通道干扰较大,采用控制方法时,无人机的空速跟踪误差最大达到044。由此可知,对于存在风干扰以及模型不确定性的固定翼无人机纵向着陆控制系统,控制方法的效果比较差。从图6所示垂直下降速度曲线可以看出两种控制方法下,无人机触地时的垂直下降速度都在-02左右,在允许的安全接地速度范围以内。
6 结论
本文主要研究了固定翼无人机在外部风干扰以及模型不确定性影响下的纵向自动着陆控制问题。通过理论分析与仿真验证,有如下结论成立:
1)设计了有限时间扩张状态观测器,对复合干扰进行有限时间精确估计。
2)基于有限时间扩张状态观测器设计了指令滤波反步控制器,通过指令滤波解决了因对虚拟控制量反复求导而导致的“微分爆炸”问题。
3)仿真结果表明,本文所提出的控制方法对空速与高度指令具有较高的跟踪精度,并具有较出色的抗干扰能力。相比于控制方法具有更好的着陆控制性能。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
缔客世界(2020年10期)2020-04-10
电子制作(2019年7期)2019-04-25
科学与财富(2017年33期)2017-12-19
北京航空航天大学学报(2017年6期)2017-11-23
航空模型(2016年10期)2017-05-09
航空模型(2016年10期)2017-05-09
