基于参数识别的同步电机滑模控制系统设计
2022-10-31 10:21金爱娟尹晨滨李少龙
农业装备与车辆工程 2022年4期
金爱娟,尹晨滨,李少龙
(200093 上海市 上海理工大学 光电信息与计算机工程学院)
0 引言
永磁同步电动机(Permanent Magnet Synchronous Machines,PMSM)因其高效率、运行可靠、高控制性能等优势被广泛应用于各类工程领域[1]。精确的转速和转子位置信息是实现高性能磁场定向控制(Filed Oriented Control,FOC)的前提。机械式传感器可以观测电机转子信息,但会增加系统成本,降低运行可靠性且并不适用于所有场合,因此基于无传感器的控制策略在不断发展,其中滑模观测器因其较好的鲁棒特性而得到了广泛研究。
滑模观测器是通过反电势提取信息而后进行估计的一种无传感器控制方法,滑模控制系统性能表现与电机参数的准确性具有密切关系。在实际运行中,电机温度的变化导致定子电阻发生变化[2],不同运行工况也会使电机电感值发生变化[3]。为了降低电机参数不准确造成的影响,提高滑模控制系统性能,需要对永磁同步电机进行电阻及电感在线辨识。
目前国内外研究的同步电机在线参数辨识方法主要有最小二乘法[4]、卡尔曼滤波法[5]、模型参考自适应法[6]、人工智能识别法[7]等。递推最小二乘算法原理简单,具有良好的识别精度且算法收敛速度快,是常用的在线辨识算法。但是递推最小二乘法在识别过程中对所有旧数据进行保留,大量数据的存在导致辨识实时性差。文献[8]在递推最小二乘算法中引入固定遗忘因子,提高算法的实时辨识能力。但遗忘因子最小二乘辨识算法中遗忘因子设置过小会降低系统稳定性,过大会导致算法收敛速度过慢,辨识结果不能及时跟随真实值变化,影响控制性能,固定遗忘因子显然无法使控制系统获得最佳性能。
本文对递推最小二乘辨识算法实现辨识的原理进行了阐述,加入动态遗忘因子对永磁同步电机参数进行在线辨识,解决固定遗忘因子带来的问题。将识别的电阻值与电感值反馈到滑模观测器,提高滑模控制系统中电机运行稳定性与转子位置识别准确性,证明将电机参数在线辨识与滑模控制系统结合可以提高系统性能。
1 PMSM 参数辨识数学模型
两相同步旋转坐标系中,表贴式永磁同步电机电感Ld=dq=Ls。忽略铁芯饱和,不计涡流和磁滞损耗且各绕组对称时,表贴式永磁同步电机在d-q坐标系中的电压方程为

式中:ud,uq——d,q轴定子电压;id,iq——d,q轴定子电流;Ls——定子绕组电感;R——定子绕组电阻;ωe——转子电角速度;ψf——转子永磁体磁链。
对式(1)离散化处理可得式(2)[9]:

将式(2)作为永磁同步电机参数估计的基本模型,对电机定子电阻、电感进行在线估计。
2 最小二乘算法
2.1 最小二乘算法
最小二乘算法由高斯在1975 年提出[10],被广泛应用于系统参数辨识,其模型如图1 所示[11]。

图1 最小二乘算法模型Fig.1 Model of least squares algorithm
由图1 可得最小二乘算法表达式为

式中:φT(k)θ(k)——系统模型表达式;φT(k)——可以观测到的中间量矩阵;θ(k)——需要辨识的系统参数;e(k)——均值等于0 的随机变量矩阵[12],表示辨识系统的扰动误差。
递推最小二乘算法能够解决在线辨识过程中数据量大导致的内存占用大以及处理速度慢的问题。但随着数据量的增加,递推最小二乘算法的修正能力不断下降,可以通过在递推最小二乘算法中引入遗忘因子以保证算法性能。构造带有遗忘因子的目标函数为

式中:λ∈(0,1——遗忘因子,在实际应用中通常取值0.900~0.995[13]。
2.2 动态遗忘因子
传统最小二乘参数递推算法中遗忘因子是根据跟踪性能以及对噪声的鲁棒性折中确定的固定值,起到按固定速率削弱既往观测数值的作用。由式(3)可知

当误差大时,要取较小的遗忘因子提高算法处理速度;当误差小时,要取较大的遗忘因子提高识别精度。显然,固定的遗忘因子无法实现这一目的。本文采用动态遗忘因子[14]提高递推最小二乘辨识算法的性能。

式中:λ(k)——遗忘因子;λmin——最小遗忘因子;ρ——常数;e(k)——最小二乘算法中的误差。
动态遗忘因子的实现机制是当预测误差较大时,采用较小的遗忘因子;在预测误差较小时,则采用较大的遗忘因子。
采用动态遗忘因子的最小二乘递推公式为

对比式(2)和式(3)可知,对电机最小二乘算法模型为

3 永磁同步电机滑模控制系统
3.1 滑模控制器的设计
滑模控制理论具有良好的鲁棒性,在非线性系统中得到了广泛应用。重写表贴式永磁同步电机电压方程如式(9)所示。
根据滑模变结构理论,定义滑模切换面为:


式中:υα,υβ——切换信号;k——滑模增益。可以得到定子电流误差方程为

构建正定函数:

根据李雅普诺夫稳定性理论,式(15)求导并代入式(14)可得滑模观测器稳定条件为

3.2 位置与速度估计
滑模控制中的高频抖振会使得反电势信号中存在抖动,直接利用反三角函数求取转子位置角及电角速度会放大抖动带来的误差,估计得到的角度信息不够精确。锁相环技术由于具有抗噪声和提供快速、准确的同步信息的特点,在电源、通讯系统和电机控制系统[15]中得到了广泛的应用。基于锁相环的位置估计原理结构如图2 所示。

图2 基于锁相环的位置估计原理图Fig.2 Schematic diagram of position estimation based on PLL
转子误差信息表达式为

式中:k=ψf ωe。
锁相环的基本原理是将压控振荡器输出信号的频率与相位锁定为参考信号的频率与相位。图2的等效框图如图3 所示。

图3 基于锁相环的位置估计等效框图Fig.3 Equivalent block diagram of position estimation based on PLL
由图3 可知,锁相环闭环传递函数以及误差传递函数为

由式(18)及典型2 阶系统传递函数可知

式中:ωn——系统自然频率;ξ——阻尼系数。
合理选择kp与ki的值就能够保证系统具有理想的稳态与动态响应。
滑模观测器通过电机参数获得电机运行信息,希望滑模控制系统具有更好的控制性能,准确的电机参数信息十分重要。通过在线辨识得到电机定子电阻值和电感值,然后将识别的参数信息反馈到滑模观测器中,可减小电机运行过程中参数变化带来的不利影响,提高同步电机滑模控制系统整体性能。
4 控制系统仿真实验
为了验证在永磁同步电机滑模控制系统中加入电机参数在线辨识环节可以提高控制能力,本文在MATLAB/Simulink 进行仿真试验,系统模型如图4 所示。表1 为本文采用的电机参数。

图4 控制系统仿真模型Fig.4 Model of control system simulation

表1 永磁同步电机参数Tab.1 Parameters of PMSM
在递推最小二乘算法中加入动态遗忘因子,而后对电感及电阻在线辨识得到的结果如图5、图6 所示。由辨识结果可知,系统启动大约0.003 s 时,电感辨识模型开始对电感值进行辨识。大约在0.04s后,能够准确估计出电感参数;大约0.05s 后,电阻辨识结果与实际电机电阻基本相同,达到了参数辨识的效果。

图5 电感辨识结果Fig.5 Inductance identification results

图6 电阻辨识结果Fig.6 Resistance identification results
设定电机转速为1500 r/min,采用id=0 的控制策略,传统滑模控制系统得到的转速波形如图7 所示,加入参数辨识后滑模控制系统得到的转速仿真结果如图8 所示。

图7 传统滑模控制得到的转速波形Fig.7 Rotational speed waveform obtained by traditional sliding mode control
由图7、图8 可知,传统滑模控制方法与本文使用的控制方法在电机启动0.1 s后均能控制电机转速达到稳定转速1500 r/min,但传统方法控制的电机速度波动明显,转速不稳定,本文控制方法得到的电机转速波动小,电机运行更加稳定。
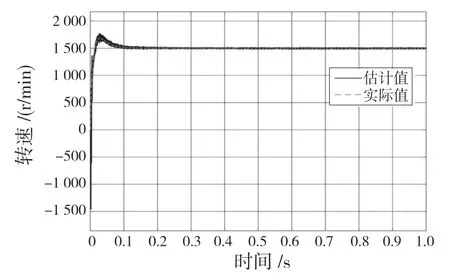
图8 加入参数辨识得到的转速波形Fig.8 Rotational speed waveform obtained by adding parameter identification
传统滑模控制系统的转子位置估计结果如图9 所示,加入参数辨识后滑模控制系统的转子位置估计结果如图10 所示。

图9 传统滑模控制测得的转子位置Fig.9 Rotor position measured by traditional sliding film control

图10 加入参数辨识后转子位置Fig.10 Rotor position obtained by adding parameter identification
由图9、图10 可知,传统滑模控制系统估计得到的转子位置与实际转子位置存在明显误差,本文使用的控制方法估计得到的转子位置与实际转子位置更加接近,转子位置辨识精度提高。
5 结论
本文将滑模控制系统与基于动态遗忘因子的最小二乘参数识别环节相结合,对电机电阻值与电感值进行在线辨识并反馈到滑模观测器中。仿真实验结果表明,将参数辨识环节加入到滑模控制系统中可以有效提高电机转速的稳定性,同时系统对电机转子位置估计也更为精确,提高了永磁同步电机的控制能力。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
计算机与数字工程(2022年4期)2022-05-10
西部交通科技(2022年2期)2022-04-27
汽车实用技术(2022年4期)2022-03-07
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
科技视界(2017年15期)2017-10-28