高超声速飞行器地面颤振评估技术研究
2022-11-02 09:37王彬文宋巧治陈浩宇
南京航空航天大学学报 2022年5期
王彬文,宋巧治,陈浩宇
(中国飞机强度研究所航空声学与振动航空科技重点实验室,西安 710065)
高超声速飞行器飞行马赫数高,其结构在流场中会产生强烈的激波并和附面层作用,从而引起显著的气动加热效应。气动加热一方面降低了材料的力学性能,另一方面不均匀的气动热场会使结构产生不均匀的应力分布,显著改变结构的动力学特性,进而使结构的颤振特性发生改变。因此,在高超声速飞行器研制中必须关注结构在所有典型工况下的颤振特性,从而保证其在全飞行包线内的安全性。
对于高超声速飞行器存在的热颤振问题,由于难以准确在地面模拟飞行器结构实际承受的高超声速流场及气动热环境,目前工程研制中尚未建立完善的地面试验验证手段,结构的热颤振特性难以充分验证,这使得后续的飞行试验风险大幅提高,显著增加了高超声速飞行器的研制成本。
针对高超声速飞行器热颤振试验验证手段匮乏的现状,研究人员近年来正逐步尝试将地面颤振试验技术引入热颤振研究领域。地面颤振试验是一项利用激振器模拟结构实际飞行中承受的非定常气动力,从而在地面实现颤振现象模拟的试验技术。该技术最早由美国John Hopkins 大学应用物理 实 验 室 的Kearns[1]在1962 年 提 出,但 是 由 于 缺乏先进的数字计算技术,该项试验技术在当时尚不具备工程价值。到21 世纪初,随着非定常气动力数字计算技术的进步及控制理论的发展,俄罗斯的Smyslov 等[2-3]及美国的Zeng 等[4]先后提出了较为完整的地面颤振试验技术工程应用方案并进行了试验验证。近年国内也对地面颤振试验技术进行了技术攻关,对其中的非定常气动力重构[5-7]、气动力模拟加载控制[8-9]等关键技术开展了诸多研究,进一步提升了地面颤振试验的技术成熟度。
热颤振验证是地面颤振试验技术具有较高研究价值的一个应用场景,该试验理念最早由潘树祥等[10]在1984 年提出并进行了初步的技术探索,但受限于当时的试验能力并未进一步研究。笔者团队[11-12]近年来开展了诸多考虑气动热环境的地面颤振试验相关技术研究,并在文献[13]中实现了针对受热翼面结构的时变颤振边界预测与验证,但是该试验方案中仍存在着气动力加载控制频带窄、试验温度较低等不足,为此本文将对相关试验技术开展进一步的优化与研究,提升地面颤振试验技术的应用范围与测试结果精度。
1 热环境地面颤振试验原理
地面颤振试验是一种半实物仿真试验技术,而受热结构的颤振边界预估与验证则可以视为常规地面颤振试验技术的拓展与延伸。该项技术在采用离散激振设备模拟结构的非定常气动力的同时,利用石英灯辐射加热系统模拟结构在高超声速流场中承受的气动热环境,从而在地面实现真实飞行器结构的颤振(流-固-热耦合)现象模拟测试,为高超声速飞行器热颤振边界验证提供一种可行的试验手段。
在试验过程中,采用闭环温控的方式使石英灯辐射加热系统根据预设的温度变化曲线实现热环境加载,模拟结构在飞行轨迹中经历温升效应;采用多种振动传感器对结构的振动响应信号进行测试,基于重构的非定常气动力模型利用测试振动信号进行结构非定常气动力计算;通过多个离散点的激振器对气动力进行模拟激励,并利用控制器确保激励的精度,最终通过对试验结构施加初始扰动并观察其响应,实现对真实飞行器结构的热颤振边界测试,试验系统如图1 所示。
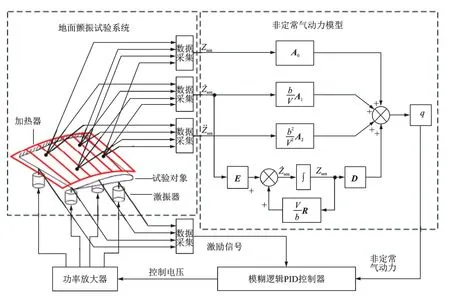
图1 热环境地面颤振试验系统Fig.1 Ground flutter test system with high temputure
2 结构热颤振特性分析
2.1 研究对象
本文采用了一个钛合金三角形翼面作为研究对象,其根弦长1 800 mm,梢弦长150 mm,半展长1 200 mm,前缘线与根弦的夹角为31°,厚度9 mm,试验件根部通过螺栓与钢梁底座连接模拟固支边界,具体形状如图2 所示。试验件材料为TA15 钛 合 金,其 密 度 为4 450 kg/m3,泊 松 比为0.39。
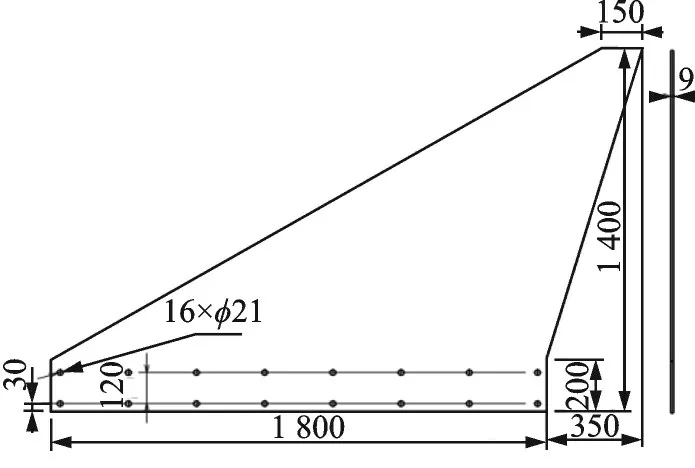
图2 翼面几何尺寸Fig.2 Geometrical size of wing
2.2 气动热环境
本文通过工程方法计算结构承受的气动加热热流密度,再通过结构传热计算获得结构的温度场,由于本次研究采用的三角形翼面结构构型简单,因此采用工程算法可以兼顾计算精度和效率。
依据牛顿冷却定律,在超声速流场中边界层传递至结构的热流密度可表示为

式中:qa为气动加热热流密度;α为对流换热系数;Te为边界层外缘的流体温度;Tw为绕流物体壁面温度;ε为热辐射系数;σ为波尔兹曼常数。
对于飞行器的非驻点部位,对流换热系数α可分为层流和湍流两种流动情况进行计算,对于本文中的翼面结构可用层流条件计算

式中Ve为边界层外缘的流体运动速度。在采用参考温度法时,密度ρ*、定压比热C*p、雷诺数Re*、普朗特数Pr*均为特定参考温度T*下的值,其中密度ρ*由边界层外缘密度ρe根据流体动力学关系计算得到,定压比热C*p可查表获取,雷诺数Re*和普朗特数Pr*计算公式为
式中粘性系数μ*可依据萨特兰公式计算
式中γ为比热比,对于量热完全气体γ=1.4,r为恢复因子。
设定飞行环境为海拔高度20 km,飞行马赫数由Ma3.6 升至Ma5,选取Ma3.6、Ma4、Ma4.5、Ma5 共4 个工况点,采用上述气动加热工程近似方法及结构传热有限元法进行求解,可得在加速过程中结构前缘最高温由450 ℃升至730 ℃,最终Ma5 状态下结构温度分布如图3 所示。
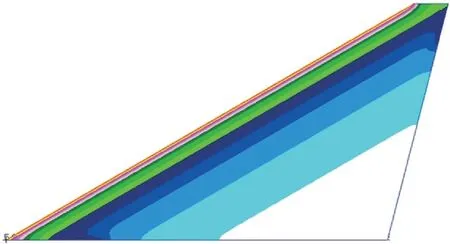
图3 Ma 5 下结构温度场Fig.3 Structure temperature field at Ma 5
2.3 动力学特性分析
以2.2 节所得时变温度场作为边界条件开展结构动力学分析。采用时间冻结假设,在选取的4个工况点温度场下,分别开展热模态及热颤振分析。
热模态分析从材料弹性模量以及不均匀热应力两方面考虑温度对结构模态特性的影响,计算结果显示,随着结构前缘最高温由450 ℃升至730 ℃,结构第一阶模态频率由5.76 Hz 降至3.76Hz,第2阶模态频率由15.59 Hz 降至10.04 Hz,在最高温440 ℃及730 ℃下结构的前两阶模态频率如图4所示。
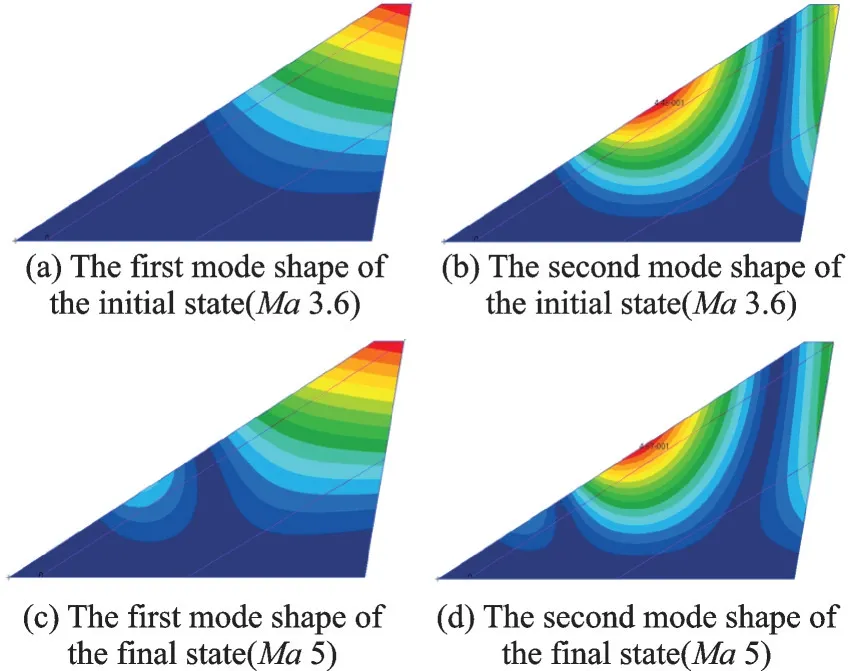
图4 结构前两阶热模态振型Fig.4 Two lower mode shapes of structure
根据上述不同工况点下的热模态数据开展颤振分析,获得4 个工况点的第2 阶模态分支v-g曲线如图5 所示。结果显示,在翼面结构温度场由初始状态变化至最终状态的过程中,其颤振临界速度由1 362 m/s 降至886 m/s,颤振频率由12.5 Hz 降至7.6 Hz。

图5 第2 阶模态v-g 曲线Fig.5 The second modal’s v-g plot
3 考虑多工况的气动力综合优化重构
3.1 气动力模型优化降阶
如第1 节所述,地面颤振试验采用离散激振力来模拟结构在飞行中实际承受的分布式非定常气动力,该方法的可行性已在文献[5]中进行了验证。确保离散激振力与连续非定常气动力等效是保证颤振边界结果精度的前提,而在试验设计中该工作可进一步转化为最优的试验激励/拾振点位置选取问题。
针对上述问题,目前相关研究通常采用基于广义力等效的遗传优化算法进行求解。广义力等效优化的基本思想是在某一插值点布置方案下,通过该插值点进行离散激振力加载时的广义力与颤振实际发生时结构承受的广义气动力误差最小,则该方案即为最优方案。文献[5]经过推导得,该优化目标等效于通过该组插值点表示的气动网格插值振型与原始模态振型之间的误差最小,即
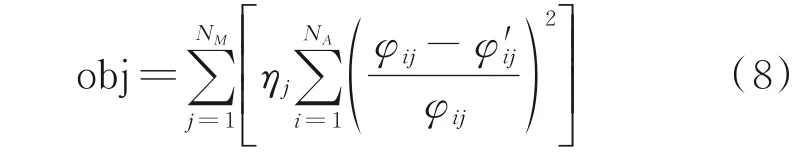
式中:ηj为j阶模态对颤振的贡献量;NM为主要模态数量;NA为气动网格节点数量;φij与φ′ij分别为缩减前后的气动力插值振型。obj 越小,说明缩减前后插值振型越接近,气动力模拟精度越高。
如式(8)所示,基于广义力等效的优化降阶方法需要采用结构模态振型作为气动力插值目标振型,而在热颤振系统中受气动热影响的结构热模态振型具有时变特性,这会导致在整个飞行包线的不同时刻采用式(8)所示方法所得的最优插值点位置有所不同,而在试验过程中激励/拾振点位置不能改变,因此采用如下方案,在飞行包线上进行典型工况点采样,并在式(8)中引入采样工况点的热模态参数进行综合优化,构建优化目标函数如下
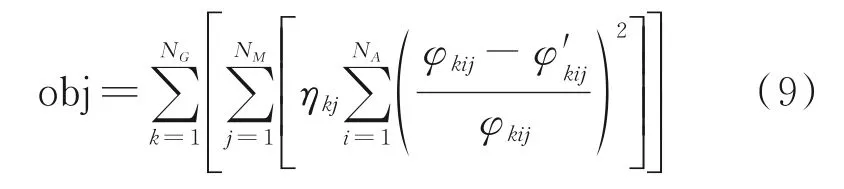
式中NG为选取的典型工况数量。
显然,通过式(9)所得的插值点布置方案虽然不是每一个采样工况处的最优方案,但是考虑整个时变历程中所有的采样工况点后该布置方案加权最优,在试验全过程中采用该布置方案所得试验结果均能保持较高可信度。
采用上述方法对第3 节所述翼面试验对象开展综合降阶优化,得到试验激励/拾振点(共点)布置方案如图6 所示。
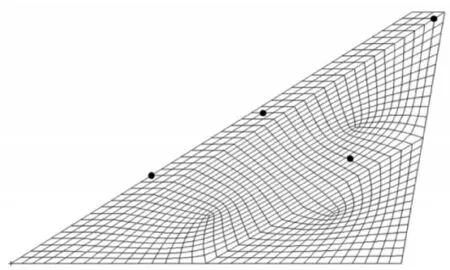
图6 最优试验激励/拾振点布置方案Fig.6 Optimal locations of the exciters and transducers
3.2 非定常气动力模型重构
在地面颤振试验中,需要根据测量得到的结构振动响应(包括位移、速度和加速度)计算气动力,因而采用频域内的气动力计算方法将飞行器及其部件受到的空气动力表示为结构物理变形的函数,表达式为

式中:fa为频域非定常气动力;q∞为来流动压;za表示结构的振动幅值;k=ωb/V为减缩频率,其中ω为简谐运动的圆频率,b为参考长度(对于翼面类结构一般取根弦长度的一半),V为来流速度。A(k)称为气动力影响系数(Aerodynamic influence coefficient,AIC)矩阵。
从物理意义的角度讲,气动力影响系数矩阵表示的是气动网格单元上的气动力fa与该单元上结构振动幅值za之间的关系,也可认为该矩阵描述了结构至气动力的传递关系,因此列向量fa、za的长度应与矩阵A(k)的维数一致。而如3.1 节所述,在地面热颤振试验中气动力模型输入输出量均为降阶后插值点处的信号zs、fs,因此也需要对式(10)进行降阶处理。
降阶前后插值点处位移与力的转换关系可表示为
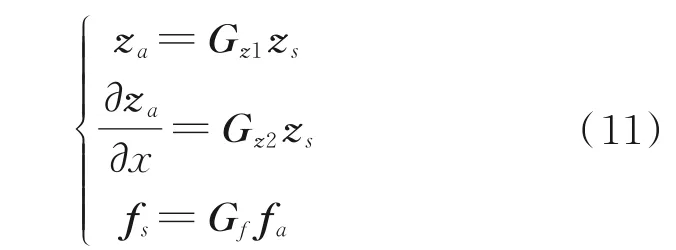
式中:Gz1、Gz2为位移插值转换矩阵;Gf为力插值转换矩阵。根据式(11),可将式(10)降阶处理为

由减缩频率定义可知,式(12)为频域的结构-气动力关系式,而在试验中传感器输入的响应信号及激振器输出的力信号均为时域信号,因此需要将式(12)转换至时域,该转换过程可以通过最小状态法有理函数拟合实现,最终关系式为
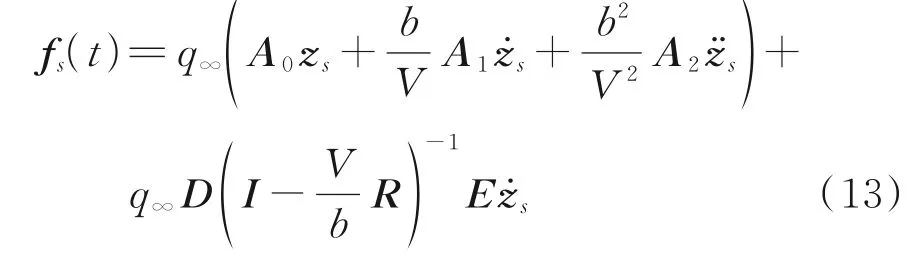
式中A0、A1、A2、D、E和R均为有理函数拟合所得的系数矩阵。显然,在式(13)中输入为各个节点的位移、速度与加速度。输出为节点应承受的非定常气动力,并且计算为低阶矩阵运算,可实现气动力实时计算的目标。
4 模糊增益自适应PID 控制
地面颤振试验需要采用电磁激振器将计算得到的等效气动力加载至被测结构,而在该过程中各个激振器会通过被测结构相互影响,为降低这种耦合效应导致的激振器加载偏差,需要采用控制算法对激振系统进行加载控制。
比例、积分和微分(Proportional integral derivative,PID)控制是目前应用最广泛的控制技术,由于其参数整定不依赖于受控对象的数学模型,因此在面对被测结构具有时变特性的加载系统时,能够在时变全历程中均保持较好的控制性能。此外,PID 控制器将每一个加载通道视为一个单输入/输出系统进行控制,则其余加载通道对该通道的影响可被视为外部扰动,因此当试验加载通道数较多时,这种不考虑各通道解耦的控制方法在计算效率方面优势显著。
由颤振发生原理可知,在地面颤振试验中激振器预期加载信号与实际加载信号均为类正弦信号,因此信号加载的数值偏差可从正弦波的角度划分为幅值偏差与相位偏差,而决定激振器加载精度的主要因素为相位偏差(在相位一致时幅值偏差可由比例增益环节快速调整)。在应对此类动态系统时,由PID 控制理论可知,其控制精度主要取决于微分增益,在理想模型中微分增益越大则控制精度越高。但是微分环节对噪声等高频扰动较为敏感,考虑到实际试验中的信号质量,较大的微分增益极易造成系统发散[14]。为了在控制精度可接受的前提下确保加载控制系统稳定性,在此引入模糊控制理论对微分增益进行自适应调节。
模糊增益自适应PID 控制原理如图7 所示,通过推导出PID 参数与加载偏差间的模糊关系,在原有PID 控制系统的基础上增添模糊控制器,从而在系统运行中根据实时加载偏差对PID 参数进行调整(本研究中只调整微分增益Kd),从而保证受控系统的加载精度与稳定性。
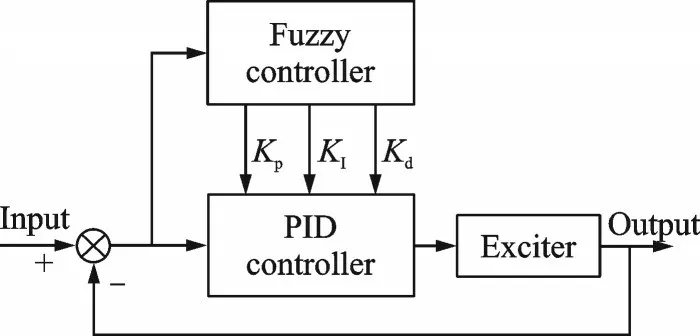
图7 模糊增益自适应PID 控制方法Fig.7 Adaptive fuzzy PID control method
为了实现适用于本次受控对象的控制器构建,首先需要明确加载偏差与PID 控制器性能间的模糊关系。依据经验,当理想信号与实际加载信号的相位偏差至多约±5°时,即视为激振器加载精度满足试验需求,此时被控系统的伯德图如图8 所示,对应的时域加载数值偏差如图9 所示。
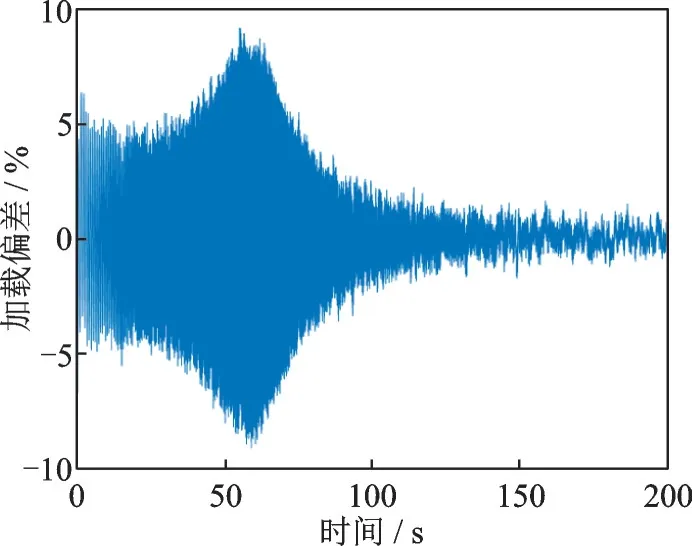
图9 被控系统时域加载数值偏差Fig.9 Time domain loading deviation of the controlled system
由图8、9 可知,加载相位偏差不超过5°对应的加载数值偏差应不超过10%,由于加载数值偏差可以在试验进程中实时获得,因此可以构建加载偏差最大值Maxe与输出PID 微分增益修正量Kd间的模糊关系:
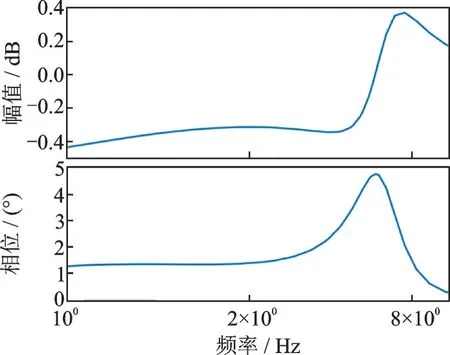
图8 被控系统伯德图Fig.8 Bode diagram of the controlled system
(1)Rule 1:If(MaxeisN)then(KdisN);
(2)Rule 2:If(MaxeisZ)then(KdisZ);
(3)Rule 3:If(MaxeisP)then(KdisP)。
其中,Maxe的论域应按照前文所述不超过10% 的限制条件对称划分,在此设置为[0.06,0.14],Kd的论域设为[—0.5,0.5],隶属度函数构建如图10 所示。
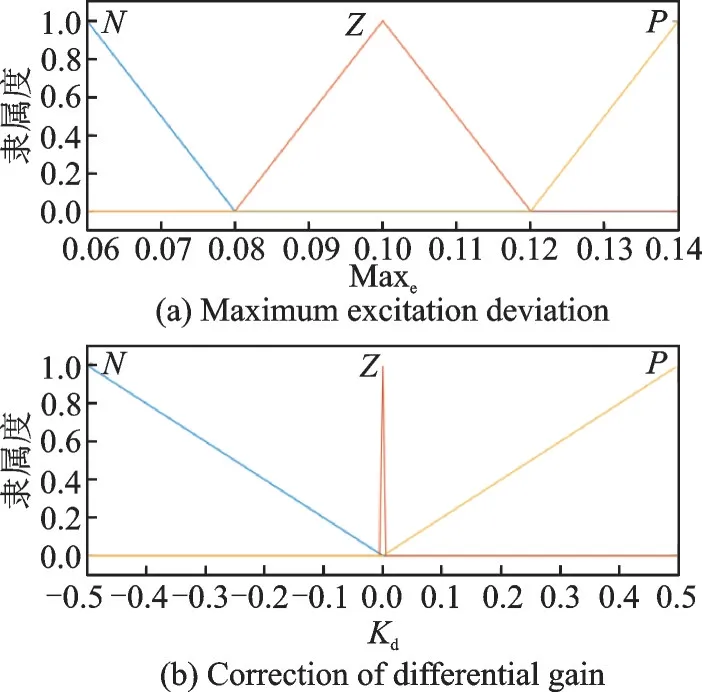
图10 隶属度函数Fig.10 Subordinating degree function
为验证控制器效果开展扫频试验,向被测结构两个加载通道同时加载1~40 Hz 的扫频信号,可得其中一通道在引入控制器前后的输出信号如图11 所示。显然,模糊增益自适应PID 控制方法能够在保证系统稳定的前提下,较为显著地提升激振力加载精度,满足地面颤振试验中多通道激振力精准加载的需求。
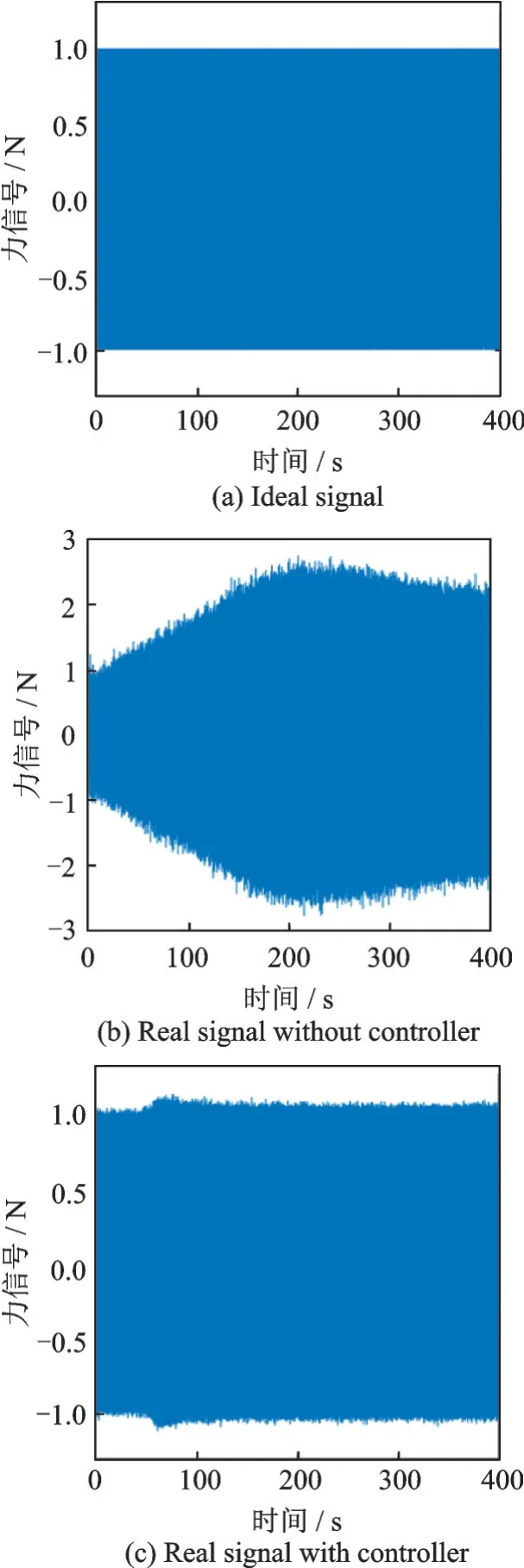
图11 扫频试验输入及输出信号Fig.11 Input and output signals in frequency sweep test
5 地面颤振试验系统集成
5.1 气动热环境模拟
本文采用石英灯辐射加热方式模拟结构承受气动热环境,加热系统由石英灯管辐射加热器、热电偶、加温控制仪和可控硅等组成,如图12所示。加热系统工作原理可概括为:系统通过布置于被测结构表面的温度传感器获取测点温度,加温控制仪根据测得温度与预设温度计算加载修正量并通过可控硅调整石英灯加热器功率,实现温度场的闭环控制。
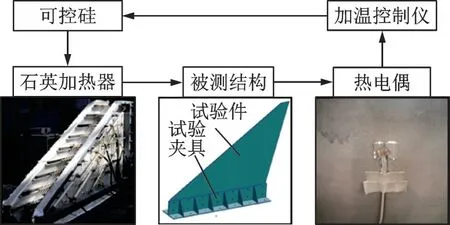
图12 气动热环境模拟系统Fig.12 Aerodynamic heating simulation system
依据2.2 节计算所得温度分布,将翼面划分为8 个加热温区,翼面两侧温区对称布置,加热方案如图13 所示。正式试验温升时间设定为70 s,其中1/5 与2/6 温区为一组,并始终保持同温,温度由450 ℃升至720 ℃,温升速率为4 ℃/s,3/7 温区温度由250 ℃升至390 ℃,温升速率为2 ℃/s,4/8 温区温度由150 ℃升至220 ℃,温升速率为1 ℃/s。
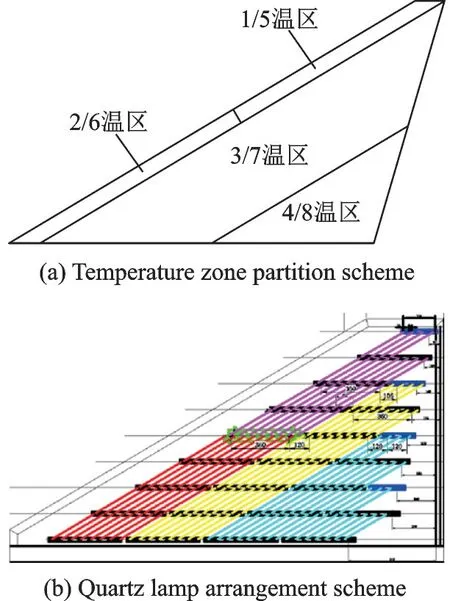
图13 试验结构加热方案Fig.13 Test structure’s heating scheme
5.2 结构激励与响应测量
结构激励采用模态激振器进行,同时设置隔热连杆以保护激振器和力传感器免受高温影响。为提高高温环境下响应测试信号质量,试验采用轻质陶瓷杆将结构响应信号引出高温环境进行测量,如图14 所示,相关文献[15-16]已经证明采用此类轻质引申杆对结构模态特性的影响及动响应信号传递精度均能满足工程要求,可以用于地面颤振试验。
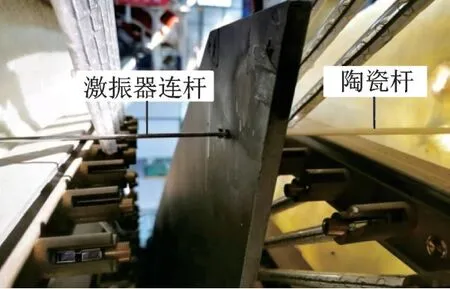
图14 结构测点处陶瓷杆引申装置Fig.14 Ceramic rod extension device on measuring point
6 试验测试与结果分析
利用第5 节所述气动热环境模拟系统与结构激励/测量系统集成构建能够模拟气动热环境的地面颤振试验系统,如图15 所示,其中采用激光位移传感器测量节点位移信号并微分获得速度信号,采用加速度传感器测量节点加速度信号。按照实际包线飞行过程中结构的颤振临界边界时刻改变,因此在试验系统中引入时变颤振边界跟踪模块,该模块通过在试验过程中依据实时获取的结构响应来调整试验风速,从而实现对时变颤振边界的跟踪与测试[16],该模块与非定常气动力模型、模糊PID 加载控制器均由NI 半实物仿真系统实现。
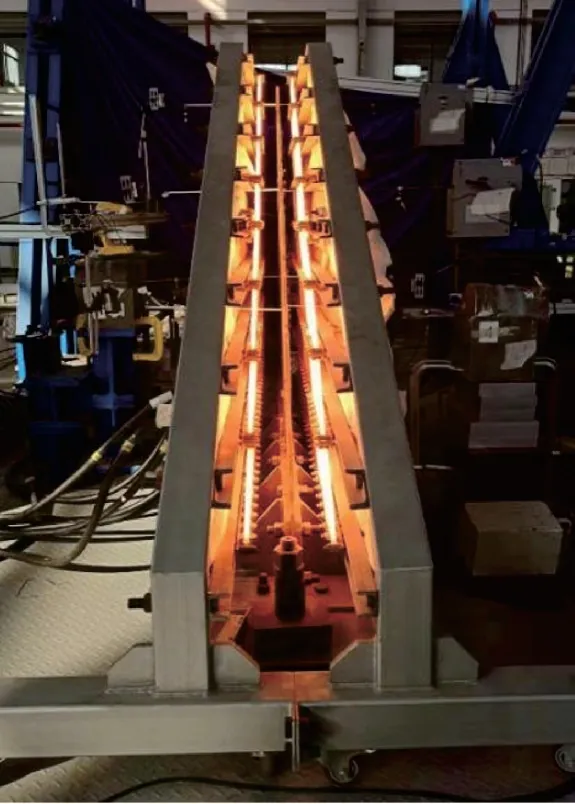
图15 地面颤振试验现场Fig.15 Ground thermal flutter test site
本次试验中,正式温升阶段的初始状态即为大梯度温度场(450-250-150 ℃),考虑到传热特性结构难以长时间保持该温度场作为预热状态。为此,设定全结构50 ℃作为预热温度场,并以5.1节设定的温升率从该预热温度场直接升温至最终状态温度场,并在加热系统启动100 s 达到初始状态温度场后开始正式试验,地面颤振系统在加热开启时即以一个极低的空速运行,在即将达到试验初始状态温度场前5 s 将空速调整为预实验所得的初始值(对于本次试验为1 500 m/s)并开启时变颤振边界跟踪模块。试验所得结构监测点响应与颤振临界速度曲线如图16 所示,图中时间轴包括空速预调整的0~5 s 及正式试验的5~75 s。

图16 地面颤振试验结果Fig.16 Ground thermal flutter test results
选取工况点处的数值计算结果(即图16 中三角形标记点)与速度跟踪数据作对比,结果如表1所示,可以看出地面颤振试验结果与分析结果较为接近,相对误差均在10%以内,满足工程颤振测试精度要求。

表1 地面颤振试验结果及误差Table 1 Ground thermal flutter test results and errors
7 结 论
本文研究实现了高超声速飞行器热颤振特性的地面测试与验证,证实了该技术的可行性与测试结果的可信度,为高超声速飞行器的颤振测试与评估提供了一种可行的试验手段。具体结论如下:
(1)本文建立了多工况点气动力综合优化缩聚方法,解决了时变结构的气动力降阶难题,满足了全飞行包线内的地面颤振试验需求。
(2)针对现有激振器加载控制算法控制带宽较窄的缺陷,本文基于模糊逻辑实现了PID 控制参数的在线调节与整定,适应时变系统激振力控制,确保了不同温度条件下的加载控制精度。
(3)本文搭建了地面热颤振试验系统,实现了满足高超声速飞行器真实飞行条件的高温环境及大温变区间下颤振边界的跟踪与测试,获得了温度对颤振特性的影响趋势。
(4)对于本文所采用的悬臂结构,气动热效应对结构颤振特性的影响主要来源于材料弹性模量随温度变化导致的结构模态频率改变,而不均匀温度分布造成的热应力对结构颤振特性影响不大。数值分析及试验结果均表明,随着温度升高,翼面结构的颤振频率及颤振临界速度均显著下降,因此有必要研究高超声速飞行器在不同航迹下的热颤振特性,确保其在全设计包线内的飞行安全。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
机械制造与自动化(2022年2期)2022-04-19
北京航空航天大学学报(2020年3期)2021-01-14
时代农机(2019年8期)2019-12-27
中国机械工程(2019年22期)2019-12-02
小哥白尼(趣味科学)(2018年5期)2018-06-21
科技创新与应用(2018年2期)2018-01-19
北京航空航天大学学报(2017年11期)2017-04-23
太空探索(2014年5期)2014-07-12