
考虑空域功能性的终端区内三维扇区划设方法研究
2022-11-03 13:52徐灿田勇牛科新巩文健李桂芳
科学技术与工程 2022年28期
徐灿, 田勇*, 牛科新, 巩文健, 李桂芳
(1.南京航空航天大学民航学院, 南京 211106; 2.中国民用航空华东地区空中交通管理局, 上海 200335)
随着民用航空的稳步发展[1],现有的空域容量无法满足快速增长的交通需求[2-3]。终端区作为航空器飞行过程中的重要区域,运行环境复杂,空域容量时常逼近阈值。目前大多终端区扇区是参照国际民航组织的相关文件,结合主观经验设计的。这显然不能满足日益增长的交通需求,易导致管制负荷不均匀,最终限制空域容量提升[4]。
对此,中外学者一直积极探索科学的扇区划设方法。Kumar[5]以减少飞行碰撞为目标划设扇区。Sergeeva等[6]提出了一种启发式算法优化管制扇区。Zenlinski[7]总结了Voronoi图、混合整数规划和航迹聚类3种经典扇区划设方法的优缺点。Yin等[8-9]对新加坡高空空域进行了多目标扇区划设。Ghorpade[10]提出了一种基于加权图的空域配置模型。Oktal等[11]对建立的多目标扇区划设模型进行了标量化。
近年来,学者们开始考虑三维扇区划设。Tang等[12-13]提出了改进的智能体模型,较好地满足了相关约束。Min[14]提出了一种减少过载扇区管制负荷的三维扇区划设方法。Chen等[15]通过改进遗传算法进行了三维扇区划设。王超等[16]使用二叉空间分割法划设扇区。Wong等[17]提出了考虑下一小时流量的动态扇区配置方法。Wong等[18]提出了一种滚动优化方法,根据流量的不同实现扇区的渐变。
相比于高空区域,终端区扇区划设的研究较少。Wei等[19]对美国典型终端区进行研究,先在垂直方向上进行分割,而后对分割的高度层分别采用混合整数规划方法划设扇区。Granberg等[20]提出了新的终端区扇区划分方法,能够增强扇区形状的凸性。Granberg等[21]以斯德哥尔摩阿兰达机场为实例,为终端区动态扇区划设提供了概念验证。
上述研究取得了较为丰富的成果,但主要针对航路扇区,终端区扇区划设的研究较少,少数关于终端区扇区划设的研究也未能有效考虑空域功能性。在管制负荷的衡量方面,研究大多基于静态的交通密度,或只选取高峰小时内的航迹数据进行统计。《民航空管系统第十三个五年发展规划》提出了“持续优化管制扇区构型,实施扇区功能化划设”。为此,将终端区空域划分为若干三维空域单元并赋予其确定的功能属性,以管制负荷为优化目标,并考虑空域单元功能的相似性,对空域单元组合形成扇区。具体地,将管制负荷分为监视负荷与协调负荷,监视负荷基于动态密度计算,协调负荷基于移交航空器架次计算。
1 问题描述
1.1 空域建模
将终端区空域分割为若干三维空域单元,每一空域单元内包含部分雷达航迹,设在某一时间段内的终端区运行的航空器架次为m架,航迹数据的集合T可表示为
T={P1,P2,…,Pm}
(1)
每条航迹数据的集合可表示为
Pi={pi,1,pi,2,…,pi,n}
(2)
式(2)中:pi,j为第i条航迹的第j个航迹点,该航迹共有航迹点n个,按时间顺序排列,每个航迹点可定义为一个六维的向量,即
pi,j={x,y,h,d,v,t}
(3)
式(3)中:x为经度;y为纬度;h为高度;d为航向;v为速度;t为获取雷达数据的时间。
终端区空域可表示为
(4)
P′={pi1,j1,pi2,j2,…,pin,jn},
1≤it≤m;1≤jt≤nit
(5)
式中:L(P′)uvz为一个空域单元格;P′为该单元格中包含的航迹点的集合;m为终端区所有航迹数目;nit为航迹Pit中航迹点数目;u、v和z分别为单元Luvz中心点的经度、纬度和高度。
1.2 优化目标
以最小化扇区的管制负荷之和,以及均衡扇区间的管制负荷为优化目标。管制负荷通常包括监视负荷、协调负荷与冲突负荷。监视负荷是指管制员检查扇区内每架航空器的飞行轨迹和飞行情况并对其做出具体管制提示的工作量;协调负荷是指当航空器穿越扇区边界时,管制员和飞行员、管制员与管制员之间的信息交换过程中管制员承受的工作量;冲突负荷为管制员解决扇区内飞行冲突的各种行为的工作量。通过动态密度的概念将冲突负荷纳入监视负荷中,认为管制员对所辖扇区内航班的监视包括了潜在冲突的解决等工作。
对于监视负荷,早期研究中的监视负荷通常只使用静态密度,即一个扇区内航空器的架次来表示。然而,同一时间段内并非所有航空器所需要的监视工作量都是相同的,飞行状态改变的航空器通常需要耗费管制员更多的精力,仅用航空器架次衡量监视负荷并不够准确。对此,有学者提出了动态密度的概念[8-9],采取各交通复杂度因子加权组合的动态密度反映交通流的复杂度。给定扇区i的动态密度ρi定义为
(6)
式(6)中:N为给定时间扇区内的航空器架次;NH为航向变化大于15°的航空器架次;NS为速度变化大于18 km/h的航空器架次;NA为高度变化大于250 m的航空器架次;CP为横向距离小于10 km、垂直距离小于300 m的航空器数量;W1、W2、W3、W4、W5为需要预先确定的主观权重,分别取1、2.40、2.45、2.94、8。
而协调负荷的指标则相对简单明确,则以离开一个扇区的航班数量表示。综上,扇区i的管制负荷可表示为
(7)
功能性扇区划设的两个目标可分别表示为
(8)
Obj2=min[SD(Workload,i)]
(9)
式(9)中:SD(Workloadi)为各扇区间管制负荷的标准差。
1.3 约束条件
考虑到扇区划设的实际可行性,在划设扇区的过程中,考虑以下约束:①唯一性约束,即每一个空域单元只能被分配给一个扇区;②连通性约束,即同一扇区不能不相联通,如图1所示;③方便移交约束,即扇区边界距离航路交叉点的距离不能小于10 km,如图2所示。

图1 扇区连通性约束Fig.1 Sector connectivity constraint

图2 方便移交约束Fig.2 Facilitate handover constraints
2 划设方法
2.1 高度分层

图3 Delaunay三角剖分形成的Voronoi图Fig.3 Voronoi diagram formed by Delaunay triangulation
目前终端区扇区高度上通常是划为高低两部分,高扇区用于处理初始进场、最终离场和较高高度飞越航班,而低扇区用于处理五边进近、初始爬升离场航班。依照先垂直后水平的思路,首先对终端区内的各高度层提取表征航空器运动特性的参数,即平均高度变化率、平均航向变化率和平均速度变化率。接着,对数据进行标准化处理,采用Q型聚类的方法,将聚类数目分为2~4类,度量标准采用欧式距离。
2.2 三维空域单元的生成
在将终端区的高度层进行合并的基础上,分别对合并后的高度层划设扇区。通过Voronoi图将合并后的高度层水平划分为若干子单元,各子单元覆盖相应高度,即为三维空域单元。设有空间目标簇,可表示为
P={p1,p2,…,pn}⊆RN,V(pi)
={y|Dist(y,pi)≤Dist(y,pj)}
(10)
式(10)中:Dist(y,pi)为点y到pi的最小距离;V(pi)为以pi为生长源的Voronoi多边形;pj为平面中其他生长源;V(pi)={V(p1),V(p2),…,V(pn)},即为Voronoi图。
生成Voronoi图的关键在于生长源pi的选择。在终端区空域中,可以将航路点作为自然的生长源,得到空域Voronoi划分图,如图3所示。
在设计匹配网络之前,根据频率间隔和功率大小,做好设计规划工作,共塔频率之间的频率比原理上不得小于1.1,实际上最好不要小于1.5,否则很难做到理想的匹配网络。一个理想的天调网路应具备稳定性和可靠性,匹配状态良好,驻波比小于1.1,带宽足够大。
结合高低扇的划分,需确定各生长源的高度,将其分配至不同的高度层。通过提取各生长源100 m内航迹点的高度,采用K-means算法对高度聚类,确定各生长源的高度。部分生长源被多条航线穿越,其附近航迹点具有多类高度。此外,考虑到方便移交约束,需合并生长源距离小于10 km的空域单元,以获得蜕变的空域Voronoi图作为扇区划设的基本单元。
2.3 功能性的确定
为了使最终划设的功能性扇区内的空域单元具有功能上的同一性或接近性,需确定各空域单元的功能性,各单元的功能取决于单元内生长源的属性。部分航路点本身具有多种功能,此外,Voronoi图蜕变的过程中会导致有些空域单元包含多个航路点,因此会存在一个空域单元具有多个功能的情况。
在各有限单元进行组合形成扇区的过程中,具有完全相同功能属性的空域单元进行组合时优先级最高;两空域单元属性交集不为空集且不完全相同时优先级次之;而功能属性完全不同的空域单元在组合时优先级最低。

图4 上海终端区空域范围示意图Fig.4 Schematic diagram of the airspace range of Shanghai terminal area
2.4 算法设计
在空域单元组合时采用NSGA-II算法,具体流程如下。
(1)适应度函数表示。适应度函数即为目标函数。
(2)初始解的产生。按照实数编码规则产生100个初始可行解,对于种群中的每一个个体,编码的索引代表空域单元的序号,编码值表示Voronoi单元所处的扇区,根据Voronoi单元的性质,在生成编码后1.3节中的约束①和③自然满足,为使得约束②得到满足,通过以下步骤生成可行解。
步骤1规定已考虑的单元集A和未考虑的单元集U,初始的A为空集,U包含所有的单元。
步骤2在所有的Voronoi单元中随机选择n个(最终生成的扇区数量),将其编码为1~n,并将这n个单元所处集合修改为A。
步骤3在A中随机选择一个单元,并在U中随机选择一个与其相邻的单元设置相同的编码,将选中的单元所处集合修改为A。
步骤4循环步骤3直到U为空集。接着对初始解集中的每一个体分别计算适应度值和拥挤度,并按适应度的大小进行非支配排序。
(3)选择、产生新解。采用锦标赛选择方法挑选适合繁殖的父代,每次随机选择两个个体,优先选择排序等级高的个体,如果排序等级一样,则优先选择拥挤度大的个体。然后对挑选出的父代的基因进行交叉和变异操作,产生新的子代。为保证产生的新解均为可行解,交叉操作选择单点交叉方式,在随机选择的位置点上进行分割并交换右侧的部分,只需判断交叉点位置的编码是否满足约束②。变异操作则将随机选择的位置点处的编码随机变为与该单元相邻单元的编码。在修改空域单元所处的扇区时,按照不同的优先级次序进行。
(4)合并子代和父代种群,对新的种群进行适应度计算,并选择前50%的解作为新的解集。
(5)若未达到迭代次数,则返回(3),直至达到迭代次数。
3 实例分析
3.1 上海终端区运行环境
上海终端区目前为中国最繁忙的终端管制区,如图4所示,其东西长约300 km,南北宽约200 km,管制高度为6 000 m(含)以下,主要负责向上海虹桥、浦东国际机场进离场航班,辖区内其他机场及周边机场的飞越航班提供空中交通管制服务。
目前上海终端区划分为11个扇区,其北向运行时扇区划设方案如图5所示。
使用2021年6月14—20日上海终端区内北向运行时雷达记录的航迹数据。对原始航迹数据进行预处理,包括数据的清洗、分类及重采样。
3.2 上海终端区三维空域单元的生成
根据2.1节所述高度分层方法,可得到上海终端区中各个高度层进场、离场、飞越3种类型航班的运行状态。其中进场航班各高度层内的运动参数绝对值如表1所示。
采用SPSS软件,对各个高度层进行聚类,结果如图6所示。可以看出,对于进场航班,高低扇区界限范围为2 400~3 000 m。类似地,确定离场与飞越航班高低扇区界限范围,最终以2 700 m为高低扇分界线。事实上,目前上海终端区高低扇的分界也正是2 700 m。
图5 上海终端区北向运行时现行扇区划设方案Fig.5 Current sector plan for the northbound operation of the Shanghai terminal area

Y为标准高度层图6 进场航班垂直高度聚类树状图Fig.6 Arrival flight vertical height clustering dendrogram
水平划设时,以航路点为生长源将终端区分为若干个泰森多边形,以此作为空域单元。考虑到高低扇区,在K-means聚类时令聚类族的数量k=2。

表1 进场航班各高度层参数统计Table 1 Parameter statistics of each altitude of the arriving flight
低扇区共被分配生长源51个,高扇区共被分配生长源55个。通过ArcGis软件生成以不同生长源为中心的泰森多边形,如图7所示。
将生长源小于10 km的两个相邻空域单元合并,获得蜕变的空域Voronoi图,如图8所示。部分生长源高度聚类结果如表2所示。
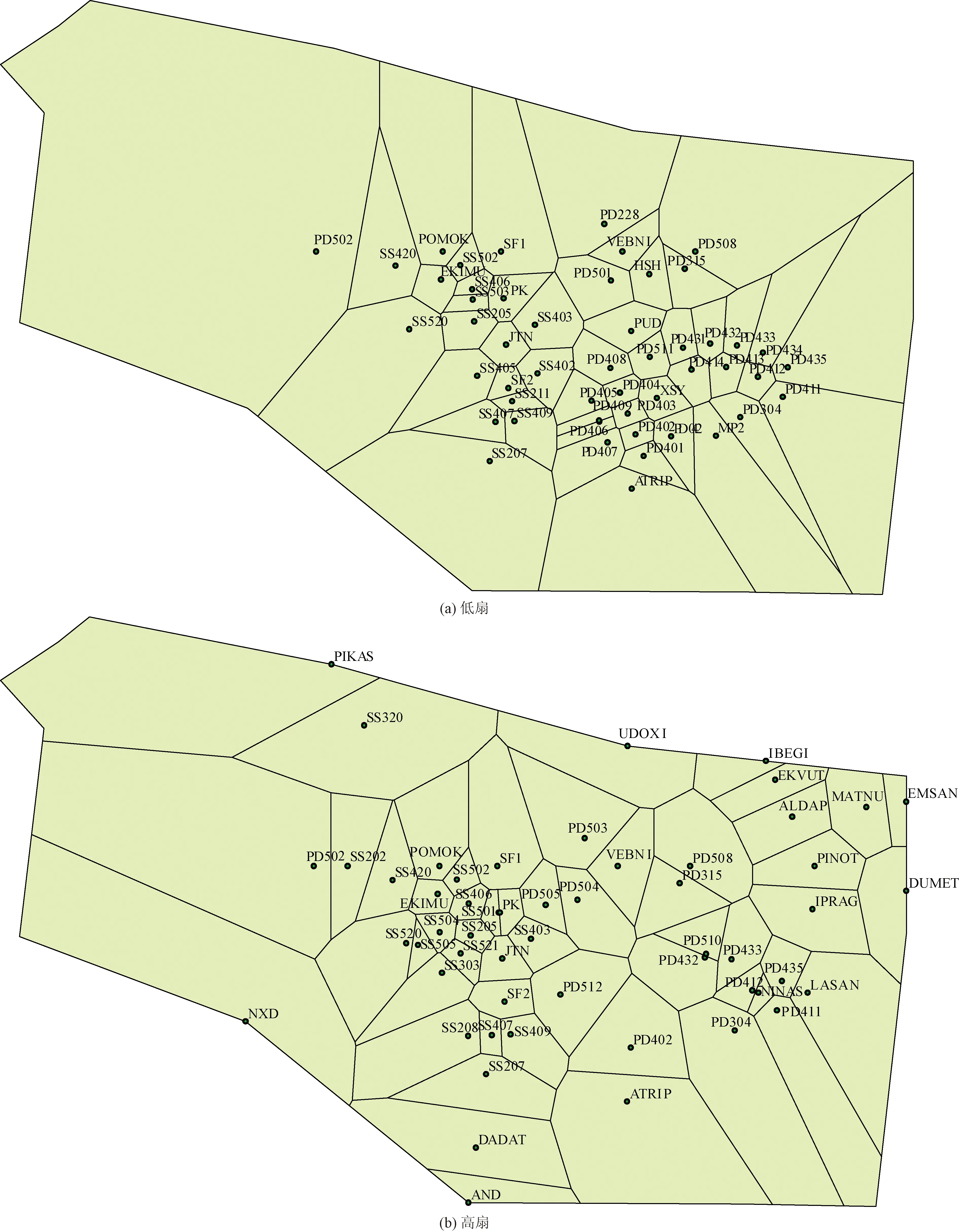
图7 上海终端区初始空域Voronoi图Fig.7 Voronoi map of initial airspace in Shanghai terminal area
按照机场及飞行性质的不同将空域单元分为虹桥进场、虹桥离场、浦东进场、浦东离场以及飞越单元5种。表3为部分空域单元的功能属性。

图8 上海终端区蜕变空域Voronoi图Fig.8 Voronoi map of transformed airspace in Shanghai terminal area

表2 部分生长源高度的K-means聚类结果Table 2 K-means clustering results of partial growth source heights

表3 部分空域单元功能属性示例Table 3 Examples of functional properties of some airspace units
3.3 上海终端区功能性扇区的划设
通过计算得到各空域单元内的动态密度分布,可以看出高扇相比低扇的监视负荷分布更加均匀,监视密度分布如图9所示。高扇内几乎每一个空域单元都分布有一定数量的监视负荷。而低扇的监视负荷密度显然分布不均匀,靠近中心的单元密度较大,而外围单元则十分稀疏。考虑到空域容量限制,根据上海终端区现行扇区数量设定高扇划设7个扇区,低扇划设4个扇区,最后一代种群生成的Pareto解集即为各空域单元组合的优解集,如图10所示。
3.4 结果分析
由图9可知,降低各扇区管制负荷之和与管制负荷的标准差出现了此消彼长的现象。经计算,原始扇区划设方案各扇区管制负荷之和为183 230.93架次,扇区间管制负荷的标准差为6 429.24架次。在Pareto优解集中,使得各扇区管制负荷之和最低的解可将管制负荷之和降低7.54%,管制负荷标准差降低11.19%。而使得各扇区管制负荷标准差最小的解可将管制负荷之和降低5.23%,管制负荷标准差降低20.61%,如表4所示。
从优化效果来看,相比原扇区划设方案,优化后各扇区管制负荷之和可减少5%~8%;标准差可减少11%~20%,均衡了各扇区的管制负荷。这说明原扇区划设方案下各扇区间管制负荷之和不大,但各扇区间管制负荷却相差较大,即管制负荷标准差可优化空间更大。因此,选择各扇区管制负荷之和小于原始扇区的情况下,降低所有扇区的管制负荷之和效果更好的解作为上海终端区优化后的扇区划设方案,如图11所示。

图9 上海终端区空域单元监视密度分布Fig.9 Distribution of airspace unit surveillance density in Shanghai terminal area

图10 NSGA-II算法得出的Pareto优解集Fig.10 Pareto optimal solution set obtained by NSGA-II algorithm

表4 各扇区划设方案对比Table 4 Comparison of various sector planning schemes

图11 优化后的上海终端区扇区划设方案Fig.11 The optimized sector plan for Shanghai terminal area
4 结论
结合空域的功能性研究了终端区三维扇区划设问题,以管制扇区负荷为优化目标,考虑了包括连通性约束等在内的约束条件。在划设方法上,针对不同航班类型通过层次聚类的方法在高度上将终端区分为高低扇,然后通过泰森多边形生成若干空域单元,并赋予各空域单元以功能性。采用NSGA-II算法对各空域单元组合生成扇区。选取了上海终端区进行实例验证,结果表明,相比于原扇区划设方案,优化后的扇区划设方案最高可将所有扇区管制负荷之和降低7.54%,各扇区管制负荷的标准差降低20.61%,因此,提出的方法显示了其在实际扇区划设中的巨大潜力,未来可以进一步研究如何将空域功能性细分并动态组合扇区。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
计算机技术与发展(2022年7期)2022-08-02
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
南北桥(2022年2期)2022-05-31
当代陕西(2019年11期)2019-06-24
电脑知识与技术(2018年12期)2018-07-12
神州·中旬刊(2018年4期)2018-04-26
电脑知识与技术·经验技巧(2017年9期)2018-02-24
