
具有牵引失效自检测功能的高负载比微型拖曳机器人设计方法
2022-11-16 16:26王亚锋
海军航空大学学报 2022年1期
王亚锋,田 雨,崔 晶
(1.32021部队,北京 100094;2.北京工业大学,北京 100094)
随着机器人技术的不断发展,机器人小型化、微型化已逐渐成为热门研究方向。微型机器人最大的优势在于体积小、重量轻、机动灵活。它们在狭小的空间可以辅助或者独立完成人类无法完成的任务[1],并在医疗、工业等领域均有着巨大的应用价值,但同时,它又因体积小,难以提供大的负载能力,而只能作为小型的移动探测器或提供很小的负载力[2-3]。
传统微型机器人难以实现大负载力的原因在于它们都是依靠自身的移动来带动负载的移动,拖曳负载的能力完全取决于机器人驱动能力的大小。常用的驱动技术有微型电机驱动[4-5]、压电驱动[6-7]、形状记忆合金驱动[8]等。微电机驱动的优势在于可以在微型化的同时实现高精度的速度和位置控制,但由于驱动力大小与电机的减速装置有关,微型化的同时,输出功率也被限制,因而难以提供较大的输出力;压电驱动的优点是小体积可以提供大的输出力,响应速度快,然而需要较高的驱动电压,并且输出位移小;形状记忆合金的优点是输出位移大,驱动力大,缺点是由于需要加热和冷却,所以响应速度变慢。
近年来,一些学者根据壁虎脚掌黏附墙面的仿生学原理,设计了1 种基于分子间范德华力作用的黏附脚掌[9],即通过很小的脚掌就可以产生很大的黏附力,这为设计具有大负载能力的微型机器人提供了1个新的思路。2011年,美国卡内基梅隆大学的研究人员基于黏附脚掌理论设计出了1 种微型机器人[10],它可以在水平或垂直表面自由运动,并且可以在垂直表面携带100 g(超过自重17%)的负载。2015 年,美国斯坦福大学的研究人员同样基于仿壁虎的黏附脚掌理论设计了1 种轮式微型机器人μTug[11],它可以产生最大38 N 的拉力,最多可以拖拽22 kg 负载,超过自身质量1 800 倍。由于所接触的表面污渍对黏附脚掌的加载性能会产生影响,所以考虑如何对黏附脚掌在加载时出现的失效行为进行准确估计,是亟待解决的问题。
本文基于楔形刚毛阵列的黏附脚掌原理,设计了1 种具有牵引失效自检测的微型拖曳机器人。首先,针对黏附脚掌的加载、脱附的特性,设计了机器人的驱动方式和运动方式,在保证黏附脚掌加载可靠性和易脱附性的基础上,实现机器人的移动;然后,采集了从加载到黏附失效过程中黏附力的变化曲线,分析了黏附脚掌失效时黏附力的变化特征,采用电容式触觉传感器[12]对牵引失效现象进行检测,并将电容式触觉传感器集成到机器人上,实现微型机器人牵引失效的自检测;最后,设计实验样机,验证了微型机器人设计的可行性。
1 微型机器人的结构设计与运动过程分析
1.1 系统构成
微型拖曳机器人主要由3 个部分构成:机器人的运动控制系统、机器人驱动执行结构与牵引失效的检测系统。如图1 所示,数字1~11 分别表示:1)电机驱动电路板,2)核心控制电路板,3)底板,4)摩擦垫,5)前臂,6)驱动轮,7)直流减速电机,8)电机套筒,9)触力传感器,10)黏附脚掌,11)舵机。
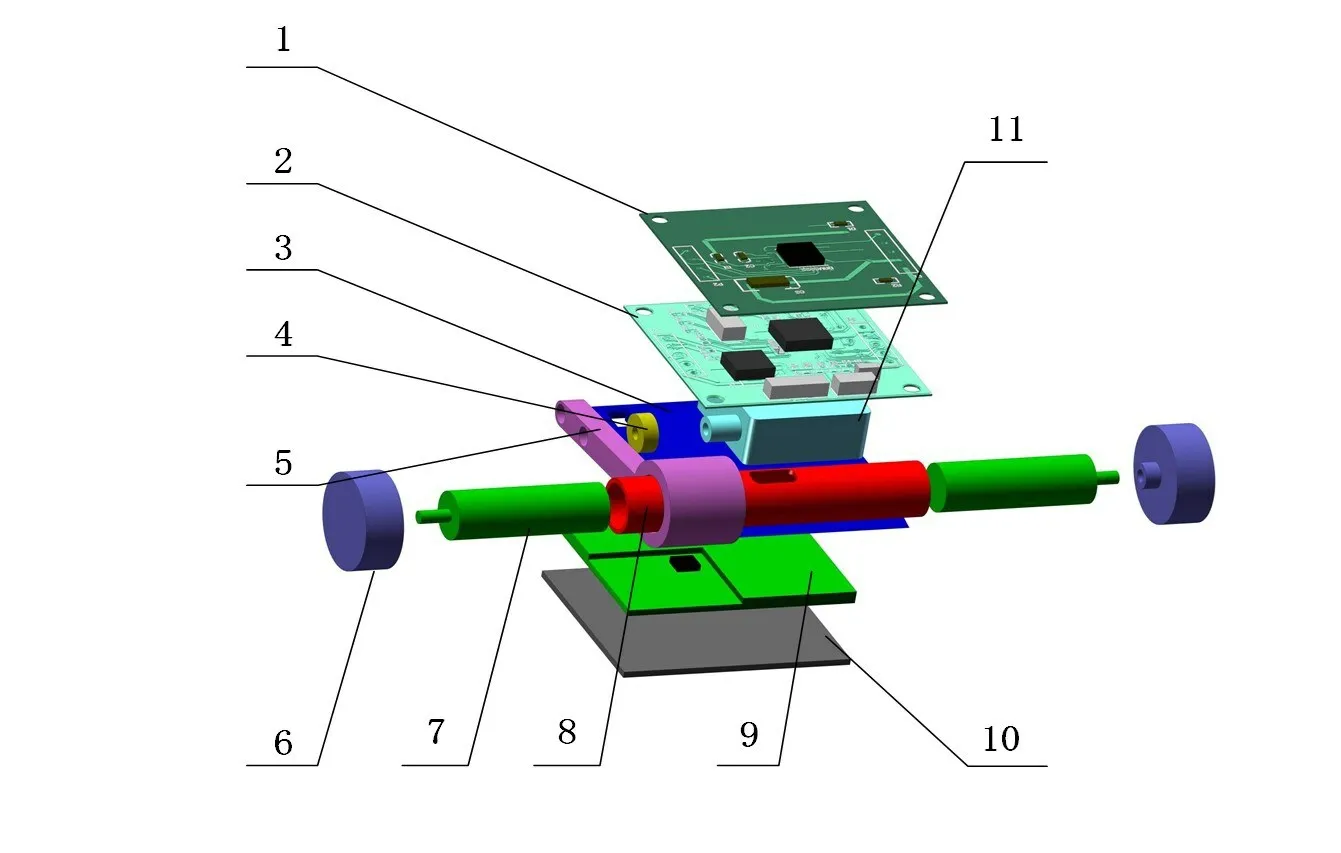
图1 微型拖曳机器人的构成Fig.1 Composition of micro towing robot
机器人的运动控制系统由核心控制电路板与电机驱动电路板组成。核心控制电路板用于产生PWM信号来控制舵机,同时通过电机驱动电路板控制直流减速电机。
机器人驱动执行结构主要包括舵机、前臂、黏附脚掌、直流减速电机和驱动轮。其中,舵机用于驱动黏附脚掌的加载与脱附,通过前臂来控制电机套筒的升降,控制驱动轮与接触表面,实现牵引状态和移动状态的切换。
牵引失效的检测系统主要通过触力传感器(本文采用电容式触力传感器)来实现。触力传感器对加载过程中黏附力的变化数据进行采集,并对采集的数据进行差分、滤波等处理,再与设定的阈值进行对比,最终实现失效检测。
1.2 微型机器人的运动过程分析
与传统的微型机器人相比,本文所设计的微型机器人模仿尺蠖运动,将拖曳负载的过程与自身移动的过程分开,1 个运动周期分为牵引负载移动和机器人自身移动,如图2 所示。这样可避免微型机器人只能通过自身移动来拖动负载的问题。
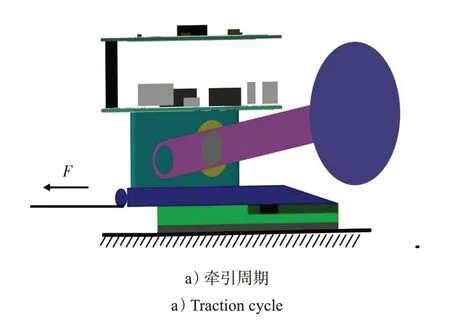

图2 微型拖曳机器人的运动周期Fig.2 Motion cycle of micro towing robot
当机器人牵引负载时,舵机开始逆时针旋转收紧腱线,同时拉动负载,此时与前臂固定在一起的电机套筒被抬起,驱动轮离开接触面。同时,黏附脚掌与接触面接触,依靠机器人与负载之间的相互作用力,为黏附脚掌提供切向载荷,实现黏附脚掌的黏附,通过黏附力将机器人固定在表面上,保证在舵机拉负载的过程中机器人不被相互作用的力拉动,即实现牵引负载的功能。
当机器人自身移动时,舵机开始顺时针旋转释放腱线,此时与前臂固定在一起的电机套筒被放下,驱动轮与接触面接触。同时,依靠前臂的支撑使黏附脚掌与接触表面分离,机器人从接触表面被释放,驱动轮通过核心控制单元输出信号使其转动,实现机器人的自身运动。以上2 个状态交互执行,最终实现微型机器人牵引负载的功能。
1.3 黏附力的产生机理
微型拖曳机器人所需牵引力设计原理源自北京工业大学机电学院已有的1 种楔形刚毛阵列[13-14]的黏附脚掌,该黏附脚掌仿照壁虎脚掌的结构制作而成,其表面由数个微米级的楔形刚毛构成,如图3所示。

图3 扫描电镜下的楔形刚毛阵列Fig.3 Observation of the wedge-shaped bristle array by scanning electron microscope
与纤维状刚毛[15]、蘑菇状刚毛[16-17]相比,楔形刚毛阵列的最大优点是可以对施加的切向载荷的变化做出非常快速地响应,容易实现脱附。对于驱动力比较差的微型机器人来说,楔形刚毛阵列易脱附的特点至关重要,楔形刚毛实物图,如图4所示。

图4 楔形刚毛实物图Fig.4 Physical picture of wedge-shaped bristles
黏附脚掌被放置在接触面上时,只有楔形刚毛阵列的尖端与接触表面接触,接触面积很小。当对黏附脚掌施加切向载荷时,受到剪切力的作用,刚毛弯曲,且刚毛侧面与接触表面接触,刚毛的弯曲增加了黏附脚掌与接触表面的接触面积,从而使黏附脚掌产生超强的黏附力[18]。当黏附脚掌的切向载荷被释放时,楔形刚毛将恢复到原来的状态,楔形刚毛与接触表面的接触面积减少,黏附力消失,实现黏附脚掌的脱附。楔形刚毛在加载、脱附过程中的变化,如图5所示。
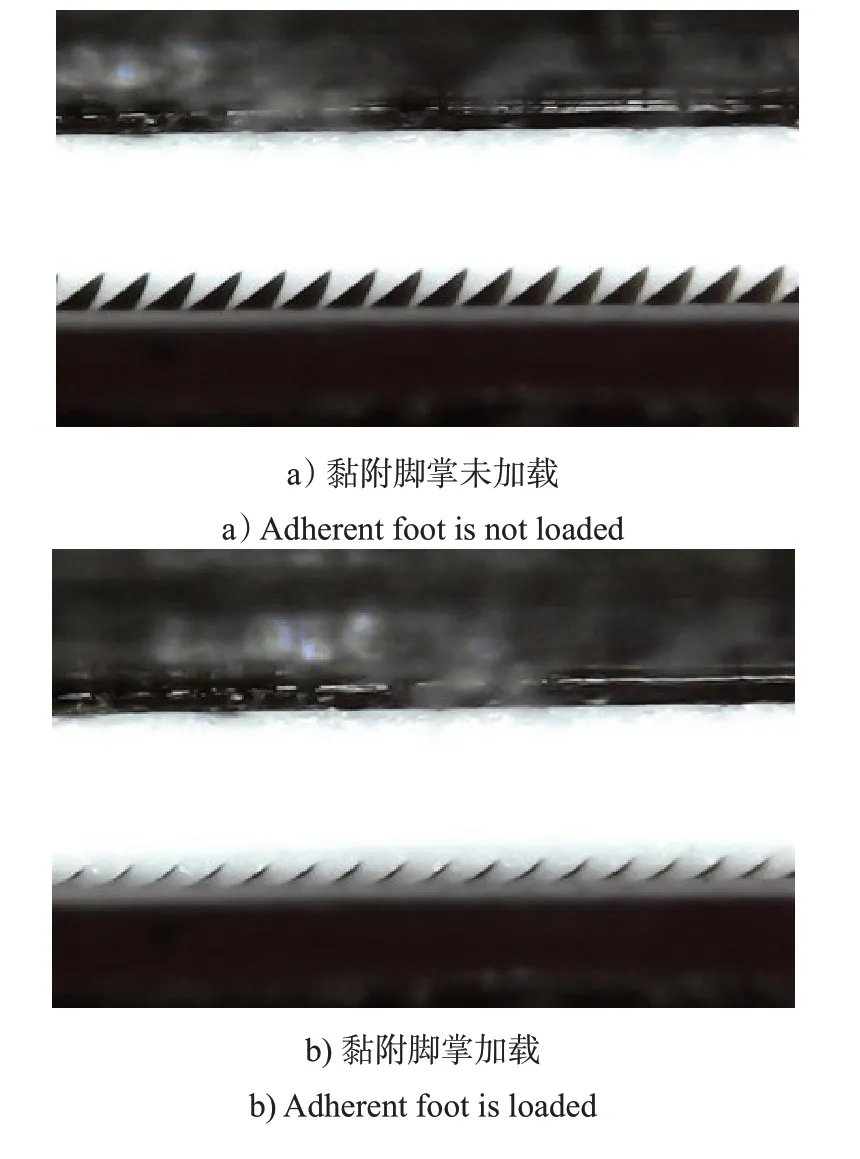
图5 楔形刚毛在加载脱附过程中的变化Fig.5 Changes of wedge-shaped bristles during loading and detaching
2 牵引失效检测方法的原理与实现
2.1 牵引失效检测方法的原理
牵引失效即为牵引过程中黏附脚掌的黏附失效。由于微型机器人在牵引负载时依靠黏附脚掌将其自身固定在接触表面上,通过黏附脚掌所产生的黏附力保证舵机在拖曳负载时,机器人不会被相互的作用力拉动。但是,黏附脚掌所提供的黏附力并不是无限大的,而且接触面的瑕疵和污染都会影响到黏附脚掌的黏附效果。黏附力失效会导致微型机器人在拖曳负载时被相互作用力拉动而脱离接触表面,从而破坏机器人的正常工作周期。
黏附脚掌所产生的黏附力与摩擦力不同,黏附力的大小不取决于法向力的大小,而是与接触表面面积有关,通过接触面积的变化可以判断黏附脚掌是否失效。对于接触面积的测量,一般采用光学的方式测量:将脚掌置于通明面板上,通过LED 灯对面板进行照射,脚掌与面板接触的地方,光线被反射回来,没有接触的地方光线反射量小,由此得到接触面积的大小。但对于微型拖曳机器人而言,该方法难以被集成。
因此,我们将每1 根楔形刚毛等效为1 个非线性弹簧,楔形刚毛阵列可以看成是若干个非线性弹簧并联,从而将接触面积的大小等效为非线性弹簧刚度的大小,如图6所示。

图6 楔形刚毛等效模型Fig.6 Equivalent model of wedge-shaped bristles
当黏附脚掌没有被加载时,楔形刚毛的尖端与接触表面接触,此时没有黏附力产生;当黏附脚掌被加载时,楔形刚毛在加载力的作用下发生形变,此时接触面积增大。楔形刚毛的总刚度增大,黏附力随之增大。随着加载力的继续变大,楔形刚毛形变所产生的弹性力逐渐大于其产生的黏附力,导致部分楔形刚毛脱离接触表面,此时接触面积减小,楔形刚毛的总刚度减小,黏附力也随之减小直至失效。故可通过黏附脚掌的刚度变化,反映黏附力的大小变化。
由于切向加载力与黏附力等大反向,通过对切向加载力随时间的变化率的测量,我们可以间接得到黏附脚掌的等效弹簧刚度的变化规律,进而得到黏附脚掌与表面的接触面积的变化:

2.2 牵引失效检测方法的实现
根据上述内容,通过设计1 种基于电容式触力传感器的阈值检测法,对黏附脚掌的失效产生进行检测。利用电容式触力传感器实时监测微型机器人在牵引负载时黏附力的变化情况,并依靠检测信号快速切换到机器人的自身移动的周期,避免牵引失效现象的发生。
该传感器切向测量单元基于电容极板间变面积的测量原理实现黏附力变化的检测,2 个电容极板分别设置在2 块不同的电路板上,电容极板在电路板上分布采用的差分指状结构,有助于提高传感器的灵敏度。切向介质层采用了1种超薄的硅胶弹性体。将黏附脚掌固定在下层电路板上,底板固定在上层电路板上。当牵引负载时,由于切向加载力的作用,上层电路板相对于下层电路板,容易发生水平位移,2个电容极板之间的相对面积会发生改变,从而使电容值发生变化。通过对电容值变化的测量,得到加载过程中黏附力的变化,如图7所示。

图7 触力传感器的切向力检测原理Fig.7 Principle of tangential force detection for contact force sensors
黏附脚掌加载到失效的过程中,黏附力随时间的变化曲线、黏附力变化速度随时间的变化曲线,如图8所示(加载是反向加载,故力值为负)。

图8 黏附脚掌加载时的黏附力变化及变化速度Fig.8 Change and change rate of adhesion force for loaded adherent foot
当黏附失效发生时,黏附力下降,黏附力的变化速度会发生明显的突变。通过设定阈值来检测黏附力变化速度的突变,从而实现黏附失效的检测。
对于微型拖曳机器人而言,阈值的设定还要考虑当负载被拉动时,负载由静止到运动会产生1 个静摩擦向滑动摩擦的转变,由于最大静摩擦力大于滑动摩擦力,所以受动静摩擦力转变的影响,切向加载力会瞬间减小,切向加载力的减小同样会造成黏附力变化速度的突变,如图9所示。


图9 负载被拉动时的黏附力变化及变化速度Fig.9 Change and change rate of adhesion force when the load is dragged
通过比对发现,负载被拉动时黏附力的变化加速度明显小于黏附脚掌失效时黏附力的变化加速度,通过设定合适的阈值,可以区分负载移动对失效判断的影响。
综上所述,牵引失效检测方法的实现可整理如下:
第一步,对机器人的负载能力进行测试,明确微型机器人的最大负载能力;
第二步,给机器人加载超过其最大负载能力的负载,根据牵引失效时黏附力变化速度的突变情况采样,确定黏附脚掌失效检测的阈值设置上限,记为bu;
第三步,给机器人加载小于其最大负载能力的负载,采样负载被拉动时,动静摩擦转变产生的黏附力变化速度的突变情况,确定黏附脚掌失效检测的阈值设置下限,记为b1;
第四步,选取合适的阈值b,满足b1<b<bu;

3 微型拖曳机器人的实验验证
3.1 微型拖曳机器人及其实验系统
对微型机器人的负载能力进行了多次测量,微型拖曳机器人使用的黏附脚掌,采用标称对称哑铃片作为机器人的负载,如图10所示。机器人的最大负载质量可以达到12 kg,机器人自重只有52 g,负载超过自身质量的231倍,实现了机器人高负载自重比。

图10 机器人牵引12 kg 负载Fig.10 Robot tows 12 kg load
3.2 微型拖曳机器人拖曳实验及牵引失效检测
为了验证牵引失效方法的可行性,我们在光滑的玻璃表面进行机器人拖曳负载实验,使负载的总重量超过机器人的最大负重极限,微型机器人能否拖动负载,将决定测试结果成功与否。我们对机器人整个运动过程中的黏附力的变化以及负载的运动状态进行检测,通过这2 个变量的变化来验证牵引失效检测方法的可行性。
在负载上加装加速度计ADXL345,以检测负载的运动状态。当负载静止时,加速度数值没有明显的变化。当负载被拖动的一瞬间,由于动静摩擦力的改变,水平方向上会产生1个加速度,通过检测这个信号来确定负载是否产生运动。同时,应用电容式触觉力传感器来检测加载过程中的黏附力变化情况。通过对整个运动过程中加速度变化和黏附力变化信息的采集,表征出机器人的运动状态和负载的运动状态,测试结果,如图11所示。
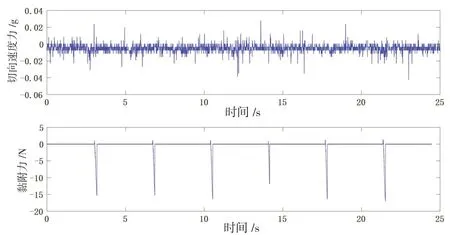
图11 牵引失效时加速度与黏附力的变化Fig.11 Changes of acceleration and adhesion force during traction failure
在图11 中,由于负载没有被机器人拉动,负载上的加速度计所采集的信号基本上都是高频的噪声,加速度没有明显变化,负载处于静止状态,此时黏附力呈现周期性的变化。在机器人的牵引周期中,黏附脚掌加载,黏附力逐渐增大,由于负载的重量超过机器人的负载能力,黏附脚掌发生失效,通过牵引失效检测使机器人停止加载,黏附力减小为0,同时机器人从牵引状态转变为移动状态,此时黏附力为0,直至下一次的牵引周期。由于机器人牵引失效检测的存在,可以使机器人在检测到失效后,立刻从牵引状态改为移动状态,从而避免黏附失效对机器人运动产生破坏性的影响,最终完成牵引失效的检测。
同时,我们还测试了牵引失效检测对机器人正常加载时的影响。同样在光滑的玻璃表面进行机器人拖曳负载的实验,使负载的总重量小于机器人的最大负重极限,确保机器人可以牵引负载,测试结果,如图12所示。

图12 正常加载时加速度和黏附力的变化Fig.12 Changes of acceleration and adhesion force during normal loading
在图12 中,由于负载被机器人拉动,所以此时负载上的加速度计所采集的信号有明显的变化,加速度发生突变的时间,刚好出现在黏附脚掌加载时。黏附力由于动静摩擦的转变而突然下降的时候,从黏附力的变化来看,机器人处于正常的加载、移动交替变换的运动周期中。由此可见,引入失效检测的方法后,在正常加载而没有发生黏附失效时,机器人对负载的加载没有受到牵引失效检测引入的影响。
4 结论
本文基于楔形刚毛阵列的仿生黏附脚掌原理,设计了1 种具有牵引失效自检测的微型机器人,该机器人解决了微型机器人的小体积和大负载能力之间的矛盾,为高负载能力的微型机器人设计提供了1 种新的思路。同时,本文对黏附脚掌在加载时黏附力失效的问题进行了研究,并且根据黏附脚掌在应用时黏附力的变化特征,设计了1 种基于阈值检测的牵引失效检测的方法。
设计的机器人样机在质量仅有52 g 的情况下,可以在光滑表面拖动12 kg 的负载,负载自重比可以达到231 倍,实现了微型机器人高负载自重比的能力。通过对加载过程中负载的运动状态以及黏附力的变化情况的检测,验证了牵引失效方法的可行性,并通过样机实际负载进行了验证。
猜你喜欢
客联(2022年3期)2022-05-31
现代电子技术(2022年6期)2022-03-25
故事作文·低年级(2021年9期)2021-11-04
考试与评价·高二版(2020年1期)2020-09-10
阅读与作文(英语高中版)(2019年8期)2019-08-27
创新作文(1-2年级)(2015年9期)2015-10-28
股市动态分析(2015年50期)2015-01-05
网络与信息(2009年3期)2009-05-21
祝您健康(1985年6期)1985-12-30
