
煤矿井下水仓清理机器人系统设计与应用
2022-11-24 00:59石军杰高贵军游青山邱建都
煤炭工程 2022年11期
石军杰,高贵军,游青山,安 彬,邱建都
(1.太原理工大学 机械与运载工程学院,山西 太原 030024;2.矿山流体控制国家地方联合工程实验室,山西 太原 030024;3.重庆工程职业技术学院,重庆 402260;4.太原市轨道交通发展有限公司,山西 太原 030000)
国家煤矿安监局针对煤矿灾害重、风险大和下井人员多等问题,提出的《煤矿机器人重点研发目录》中运输类机器人就包含水仓清理机器人。采用机器人对水仓进行清理,可以将清仓工人从危险的工作环境中解放出来。对强化煤矿安全生产管理、真正实现减员增效、节能降耗具有重要意义[2]。
现有的水仓清理设备自动化程度低,需要工作人员跟机进行操作,存在一定的风险。本文研发一套适用于煤矿井下水仓煤泥自主清理机器人系统,采用多种传感器、摄像头结合,实现对水仓煤泥清理进程及水仓清理机器人位姿的监测,采用网络通信技术,实现远程操控机器人进行清仓及对工作面状态监测。解决煤矿水仓清理的难题,提高生产效率,达到“机械化换人,自动化减人”的目的[3]。
1 水仓清理机器人系统组成
矿井水仓自主清理机器人系统由清仓机器人、通信系统、供电系统及地面工作站组成,如图1所示。

图1 水仓清理机器人系统组成
清仓机器人主体属于水仓清理机器人系统的井下工作模块,负责清理煤泥、煤泥脱水、运输及井下水仓信息的采集。主要由绞龙连续挖取装置、煤泥泵送装置、快速振动脱水筛、履带行走装置、带式输送机、照明设备、激光雷达、里程计及避障装置等组成。清仓机器人行走机构采用履带行走装置,可保护水仓底部结构,通过性和爬坡能力强,适应水仓的带倾角结构,且不易打滑,牵引附着能力好。清仓机器人组成如图2所示。
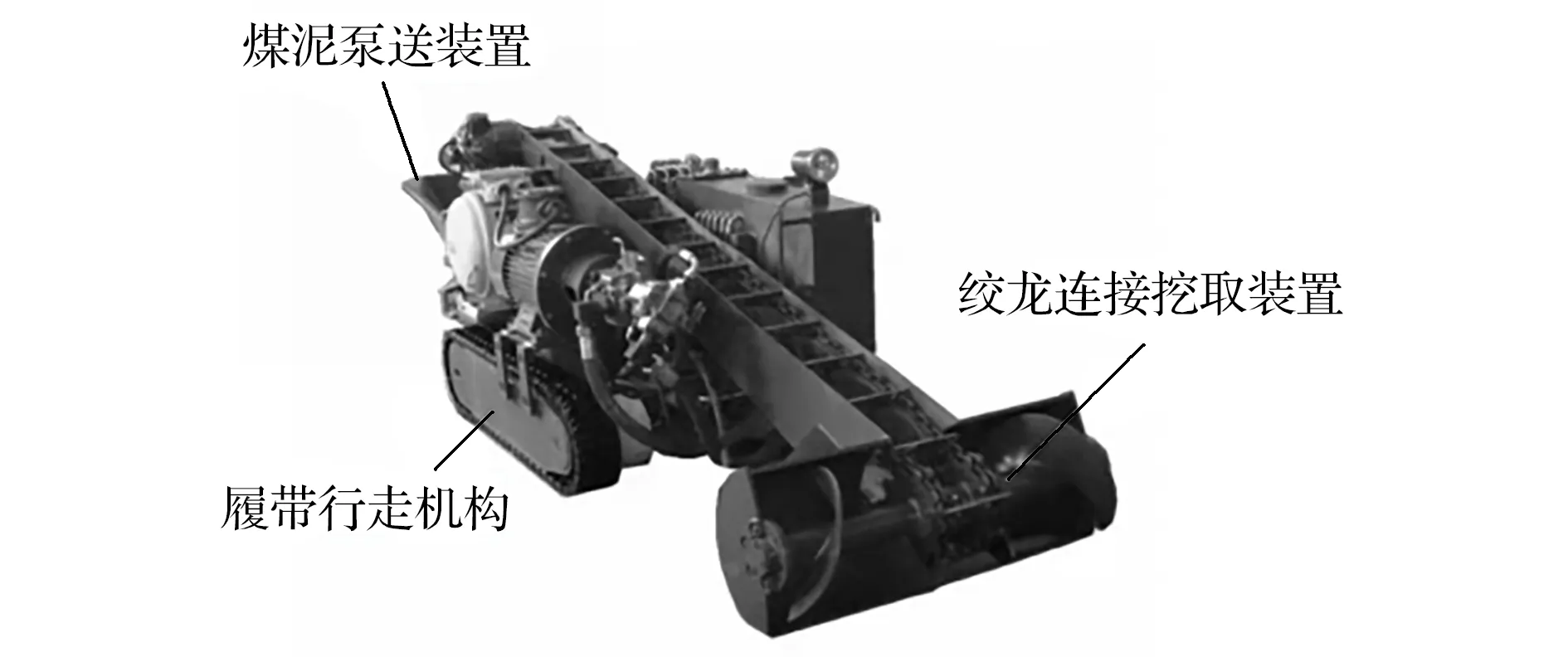
图2 清仓机器人主体
水仓清理机器人各种传感器及摄像头采集到的信息使用无线通讯系统传输,可将实时数据传输至地面远程控制端。通讯系统使用5G无线通讯系统,能够准确、全面的获取井下水仓清理数据及环境视频,实现井上井下各种数据的快速传输及根据现场情况对设备进行远程控制。无线通讯系统主要组成部分有无线基站、交换机及各个终端。无线基站主要由基站收发台及基站控制器组成,基站收发台可看作一个无线调制解调器,负责信号的接收和发送及处理,起到连接机器人与上位机,实时传输数据的作用。基站控制器负责所有的信号接口管理,主要是无线信道的分配、释放与管理,保证数据信号实时传输。水仓清理机器人也配备红外遥控功能,可供井下跟机人员进行操控应对突发紧急情况。
水仓清理机器人的供电系统由变压器、控制面板、可控开关及供电电缆组成。清仓机器人上电机额定电压为660V,供电电缆提供660V电压,其上一些部件,如液压油箱散热风扇、井下照明设备等额定电压为220V,通过变压器降压后才可以正常工作。电控柜上有相应的控制面板,可在紧急情况时,跟机人员现场操作,也可由地面远程控制端通过控制模块进行操控。对用电设备进行远程控制及设备数据采集时,需要使用PLC系统进行操作。水仓清理机器人的供电电缆缠绕在电缆盘架上,可随机器人的移动自动收放电缆长度。
在麦当劳吃完炸鸡腿和汉堡,大林带着倩倩去了顶楼的游乐场。低劣的投币游戏器材,孩子们坐在小鸡小猪的背上享受童年的乐趣。无忧的乐趣。父女俩拿着橡皮锤打了东躲西藏的老鼠,换来了一个气球的奖品。牵着飘飞的气球,倩倩洋溢着荣誉的笑脸。
地面工作站主要包括远程操作软件平台和数据存储服务器。远程操作软件平台是水仓清理机器人远程控制清仓的操作界面,可以实时查看清仓机器人的清仓进度、机器人位姿及工作面的实际清理状况,可以调取清仓机器人清仓过程中的各种数据,根据这些数据调整操作程序,可在地面实现对清仓机器人的远程控制。
上位机系统作为水仓清理机器人的中枢,负责处理和显示各种信号。视频采集摄像头采集清仓机器人清淤过程中水仓内煤泥的状态、挖取装置与脱水装置工作时的图像信号,通过上位机中的图像识别算法,监测煤泥处理。通过激光雷达、位置传感器、里程计和IMU等多传感器融合的方法获取水仓清理机器人的位姿信息,减小定位误差,满足清仓机器人的实时定位需求,方便操控人员掌握其状态。
2 水仓清理智能控制系统
水仓清理智能控制系统是上位机系统的一部分,是水仓清理机器人的决策层。针对井下水仓复杂的地形环境,需要使用大量的满足煤矿防爆要求的传感器来进行智能监测。
1)有害气体传感器。水仓清理机器人上安装有高灵敏度的CO、CH4、H2S传感器。清仓工人进入水仓工作时,对温度、距离等信息易感知,对甲烷、一氧化碳等有害气体难以感知,容易导致气体中毒,危害身体健康。利用传感器实时监测水仓内的环境信息,当环境中的有害气体浓度达到检测值时,自动报警,避免事故发生。
2)激光雷达传感器。激光雷达主要负责水仓清理机器人在煤矿水仓的定位与井下水仓的地图构建,采样频率高达8000次/s,可以使机器人更快速、精确的见图。
3)压力传感器。清仓机器人挖取、行走装置由液压驱动,在关键管路上安装压力传感器对其压力进行监测,保证清仓机器人正常工作。
4)超声波传感器。在清仓机器人与水仓壁临近的四个角上安装有超声波传感器,负责清仓机器人本体与水仓壁之间距离的检测。
3 水仓清理机器人性能参数及功能
3.1 性能参数
煤矿井下水仓清理机器人的技术参数见表1。
3.2 工作环境要求
1)水仓断面高度大于等于2.2m。
2)水仓断面宽度大于等于2.5m。
3)水仓入口坡度小于等于25°。
4)水仓长度小于等于500m。
5)煤泥淤积厚度小于等于1.5m。
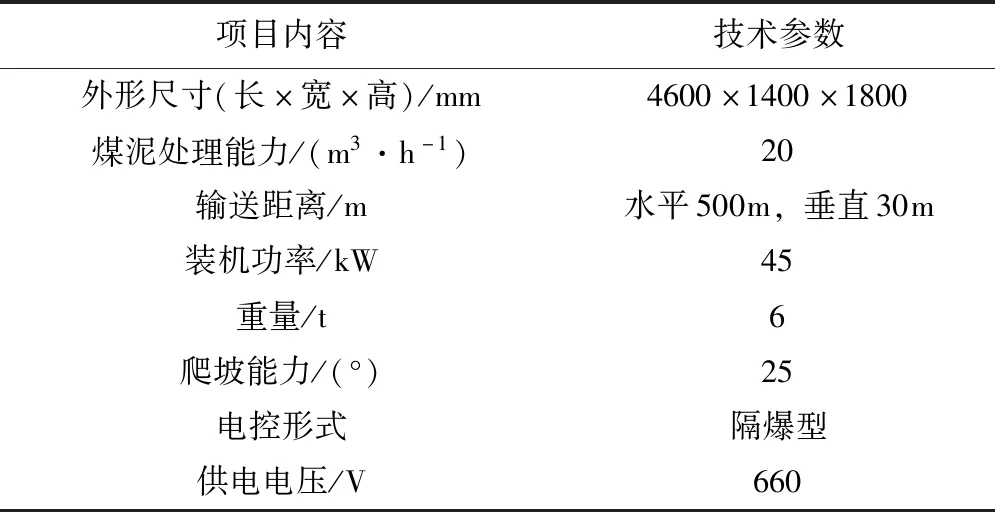
表1 水仓清理机器人的技术特征
3.3 功能说明
煤矿井下水仓清理机器人系统可代替人工完成矿井水仓淤积煤泥的清理工作,清仓效率高,大大减轻了清仓工人的劳作强度;将机器视觉技术与无线通讯网络技术相结合,可在水仓外或者地面实现井下水仓清理进度及水仓煤泥状态的监测,从而控制水仓清理机器人自主清仓,无需清仓人员在水仓内跟机操作,减少井下危险区作业人数,降低安全风险。配备自动避障与定位技术,可自动调整位姿,避免损坏机器人本身与水仓墙体结构,有效避免潜在危险发生。
该煤矿水仓清理机器人系统可实现的主要功能有:
1)视频信号采集。清仓机器人主体安装有矿用本安防爆云台摄像机,10倍变焦,360°无限位旋转,能在光线较暗的条件下获得良好的视频信号效果,抗干扰性好,实现清仓时的现场状况观察,掌握清仓进程及时调整机器运行方式。
2)智能清仓功能。水仓清理机器人支持全自动清仓模式、遥控清仓模式和就地控制模式。全自动清仓模式包括智能清仓和联动清仓两种模式。智能清仓模式下,水仓清理机器人根据事先定下的清仓任务、进程等信息,自动进行水仓内煤泥的清理。联动清仓模式下,由远程操作控制平台根据井下水仓情况下指令,清仓机器人按指令进行清仓、停机等一系列操作。遥控清仓模式下,由工作人员根据井下实际情况手动遥控清仓机器人,完成清仓工作。就地控制模式下,清仓人员可通过按电控柜控制面板上的按钮实现对清仓机器人的操控。
3)自动定位功能。水仓煤泥淤积多超过1m,清仓任务繁重,在正常8h班制的情况下,水仓清理机器人每天可向前清理煤泥20m,随后需返回水仓外,次日进行清仓时,清仓机器人可根据上次清仓存留的定位数据确定本次清仓的起始位置。清仓机器人的自动定位功能是清仓机器智能化运行的必要条件。
4)主动避障及位姿调整功能。煤矿井下水仓环境恶劣,整体为一封闭型巷道,墙壁上布有很多管道和线路,使得井下环境更加复杂。当激光雷达和位置传感器检测到清仓机器人与前进路上的障碍物(如墙壁、管路等)的距离小于预设值时,机器人停止,自动调整机身角度避免水与障碍物发生碰撞,损坏清仓机器人与水仓结构稳定性。水仓清理机器人上安装有陀螺仪,可根据倾斜角度判断清仓机器人有无侧倾风险,可后退再次清理一边履带行走装置下的煤泥,保障清仓工作稳定安全进行。
5)煤泥状态智能监测功能。由于煤矿煤层赋存条件的不同,开采方式的不同,煤矿水仓具有不同的特点,水仓沉积的煤泥也具有不同的黏性。水仓清理机器人的挖取装置由液压驱动,其液压管路上安装有压力传感器,可将压力信号转换为模拟量传回上位机,通过该方法可自动判断出煤泥的黏度,从而自动调节稀释喷头的喷水量实现淤积煤泥黏度自动调节,使煤泥处于清仓机易清理的状态,保障煤泥清理的效率。
6)管路、线缆自动收放功能。水仓清理机器人配备泵送管路收放盘及电缆收放盘架,当清仓机器人在水仓内清仓时,根据机器人在井下的位置变化,自动调节泵送管路及电缆线的长度,取代人工在井下铺设管路及线缆,使清仓工艺更加便捷。
7)水资源循环使用。煤泥水混合物经过快速振动脱水筛脱水后,煤泥含水率小于40%,使用胶带运输至指定位置,分离出来的水通过管路回收进入补水稀释管中循环使用。
8)处理后煤泥数据采集功能。在输送带上配有对称式带式输送机称量装置,可对脱水处理过的煤泥进行称重,并将数据传回数据端存储,实现煤泥清理班产量、日产量、月产量和年产量的统计和结算,优化生产管理。
4 水仓清理机器人应用实例
目前,该水仓清理机器人系统已在潞安集团潞宁孟家窑煤业有限公司矿井水仓投入使用。水仓清理机器人清理煤泥过程中将水仓中煤泥状态以及振动筛处理后煤泥状态的视频信号通过无线基站传到上位机进行处理,使用图像识别算法得出煤泥的处理量,存入数据库,方便调取监测。调度室工作人员可通过水仓清理机器人监控系统界面和视频信息获得井下水仓及水仓清理机器人的状态信息。当煤泥处理量小于设定的数值时,清仓机器人自行移动或者由地面控制人员控制清仓机器人移动清理其余地方的煤泥。
水仓清理机器人的使用,使得水仓清理人员无需进入水仓,只需在安全的地方控制水仓清理机器人进行水仓清淤,降低工人的劳动强度,大大提高了水仓清理效率,能够在较长时间内保证水仓的有效容积,为煤矿涌水提供最大的安全容积,保证煤矿的安全生产。
5 结 语
水仓清理机器人集煤泥自主挖掘、脱水、运输于一体,通过多种传感器、摄像头配合使用及网络通信技术,实现对水仓煤泥清理进程及机器人位姿的监测,并及时高效地清理水仓中的煤泥。水仓清理机器人的应用可取代人工对煤矿井下水仓进行清理工作,极大降低清仓人工的投入,提高企业生产的安全性与生产效率,符合国家加快建设煤矿智能化的要求,具有显著的社会意义与经济效益。
猜你喜欢
山东煤炭科技(2022年5期)2022-06-21
选煤技术(2022年1期)2022-04-19
中国煤炭(2022年2期)2022-03-04
山西冶金(2020年6期)2021-01-22
矿产综合利用(2020年1期)2020-07-24
文萃报·周五版(2019年49期)2019-09-10
山东煤炭科技(2019年6期)2019-07-15
山东工业技术(2016年15期)2016-12-01
中国煤炭(2016年1期)2016-05-17
现代食品(2016年1期)2016-03-24
