GAMIT和CosaGPS在工程控制测量中的应用
2022-11-26 05:47宁长春李世显
地理空间信息 2022年11期
王 瑞,宁长春,陈 联,李世显
(1.中油(新疆)石油工程有限公司,新疆 克拉玛依 834000;2.塔里木油田分公司油气工程研究院,新疆 库尔勒 841000)
在一般的中小型测绘工程控制测量项目中,短基线的GPS静态定位技术已经成熟,天宝TBC、莱卡LGO、中海达HGO、华测CGO等GPS接收机附带的随机软件已能满足大多数工程控制网数据处理的精度要求。然而,在一些大面积长距离的油气输送管道、沙漠公路等大型测绘项目中,测区线路长度可达几百甚至上千km,沿线控制点稀少、分布不均且离线路较远,强行引入到工程控制网中,必定导致基线超长且不合规范,此时的GPS接收机随机商用软件,因其数据处理模型存在一定的缺陷,无法消除或削弱星历误差、大气延迟误差等多项误差,因此解算精度不能满足要求。在我国西北的新疆、西藏等地区,测区往往没有可利用的已知控制点,无法进行常规GPS静态测量。
一种有效解决上述工程控制测量问题的方法是利用中国地壳运动观测网络工程的25个连续运行基准站和国内国外已有的地球动力学服务站(IGS)的全天不间断观测数据,任意未知站点在任何观测时段均可与它们组成结构良好的同步观测环,进而可精密确定未知站点的坐标。GPS连续运行基准站的存在大大降低了(甚至无需)未知观测点间观测同步的要求。将下载的连续运行基准站单天GPS观测数据作为已知点观测数据,引入测区布设的工程控制网中;再利用GAMIT软件进行长基线联合解算;然后利用CosaGPS数据处理软件进行网平差,通过历元框架转换、坐标形式转换精确求取待定点CGCS2000平面坐标;最后利用测区少量GPS/水准点和地球重力场模型EGM2008求取待定点的正常高。具体技术路线如图1所示。
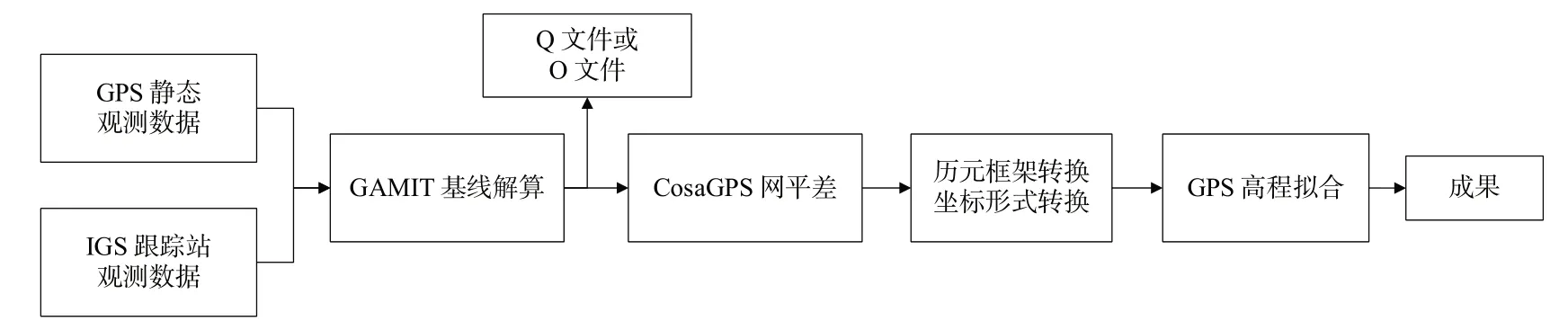
图1 基于GAMIT和CosaGPS的GPS静态观测数据数据处理流程图
1 GAMIT基线解算
1.1 GAMIT软件简介
GAMIT软件是由美国麻省理工学院和美国加利福利亚大学海洋研究所共同研制的,主要是用于定位和定轨的GPS数据分析软件包,也是世界上最优秀的GPS精密数据处理软件之一。它可采用精密星历,并考虑大气延迟、潮汐影响和其他系统误差模型,消除卫星钟差和接收机钟差的影响,减弱轨道误差、大气折射误差等系统误差的影响,从而提高精度。因其具有免费申请获得、源代码开放、更新速度快、解算精度高以及能进行数据自动化处理等优点,GAMIT软件在国内外得到了广泛应用。因此,当精度要求较高、商用处理软件无法满足精度要求时,可采用GAMIT软件对GPS控制网进行基线解算。目前该软件已更新到10.71版本,可采用安装虚拟机的方法搭建Ubuntu系统平台对GAMIT软件进行安装。
1.2 观测文件与星历文件准备
观测文件包括RINEX格式观测O文件、广播星历N文件和IGS精密星历sp3文件。本文首先利用GPS接收机的随机软件将GPS静态观测数据转换为RINEX标准数据格式,以供GAMIT软件计算使用;然后从武汉大学IGS数据中心下载所用IGS站的观测文件和星历文件。数据准备好后,在Ubuntu系统桌面上建立一个工程目录(即工程文件夹),用于存放本次需处理的所有数据,建立的所有目录均在该目录下。
1)建立子目录rinex,用于存放处理好的RINEX格式观测O文件。
2)建立子目录igs,用于存放从网上下载的对应时段的精密星历sp3文件。
3)建立子目录brdc,用于存放所有广播星历N文件。
4)建立tables目录,用于存放数据处理过程中所需的各种表格,可采用sh_setup命令建立。该命令可将GAMIT安装目录下自带的tables文件夹中的文件链接过来。
1.3 参数表文件准备
需要重点查看和设置的参数表文件包括月球星历表(luntab)、太阳星历表(soltab)、章动历表.(nutab)、极移参数(pole)、时间表(ut1.UT1)、天线高与相位中心偏移模式参数表(antmod.dat)、接收机与天线类型信息(rcvant.dat)和天线型号与量高方式改正数参数(hi.dat)。
1)首先打开观测O文件,查看接收机和天线型号;然后打开antmod.dat文件,查看其有无该接收机和天线类型,若无,则通过www.ngs.noaa.gov网站查阅该接收机天线类型,并添加到antmod.dat文件中;再打开rcvant.dat文件,根据天线型号查看gamit唯一内部码;最后找到接收机型号,若无,则自行添加。
2)打开hi.dat文件,根据天线型号查看量高方式,DHARP为直量至相位中心参考点,SLBCR为斜量至扼流圈底部。若量高方式不正确,直接修改;若找不到该天线型号,则手动添加并修改量高方式。
3)打 开tables文 件 夹,查 看soltab、luntab和nutab这3个文件表头日期,查看观测O文件日期是否在表头日期之内,若不在,则需更新这3个文件。
4)在tables文件夹中,输入doy命令,查看极移日期是否在pole.usno文件表头日期之内,若不在,则需更新pole和ut1两个文件。
上述参数表文件的更新可通过在tables目录下输入命令gftp,回车,再输入主机:garner.ucsd.edu,端口:21,用户名:anonymous,在密码处点击回车后链接至服务器,然后顺序点击achive-garner-gamit-tables进行单个文件的选择下载更新;也可直接通过ftp://lox.ucsd.edu/pub/gamit/tables/网站下载更新。
1.4 基线解算
1)打开tables文件夹,输入命令sh_upd_stnfo-files../rinex/*.yyo,更新station.info测站文件;然后打开测站文件,查看观测数据站名、接收机和天线类型、量高方式是否与参数表文件中设置的一致。
2)打开sestbl数据处理参数设置表,修改海洋文件,若不使用潮汐改正模型,则将Tides applied=31中的31改为23,Use otl.grid=Y中的Y改成N;再设置截止高度角Elevation Cutoff,保存即可。
3)打开process.defaults控制文件,可对采样间隔set sint、采样起始时间set stime、观测数据文件大小set minxf以及是否使用RINEX头文件进行设置,设置完成后保存即可。
4)上述参数文件设置完成后,在tables文件夹中执行sh_gamit-expt***命令,进行基线解算。解算过程中,若系统提示解算错误,则找到出现fatal的第一个地方,修改参数表文件,解决错误;再重新解算。
5)解算成功后,最终生成基线文件Q文件和O文件。
1.5 基线解算质量评价指标
在基线解算文件夹中打开sh_gamit_**.summary批处理综合文件,检查以下内容看基线解算是否合格:①文件中测站数Number of stations是否正确;②查看测站RMS值,通常3~10之间的数据较好;③文件中最后4个验后NRMS,此值应小于0.2;④相位模糊度的求解Phase ambiguities WL fixed 93.6% NL fixed 70.5%,两个值接近100%为最优,大于90%代表很好,70%~85%属于一般;⑤Q文件中基线解算的相对精度应小于10-8。
2 CosaGPS网平差
2.1 CosaGPS平差软件简介
为了满足工程测量单位对GPS数据处理的要求,在分析研究GPS数据处理理论的基础上,武汉大学自主研制了CosaGPS数据处理系统。该系统具有操作简便、界面友好、解算容量大、速度快、系统稳定性好、输出成果全、功能全面、能满足多种规范要求等优点。因此,与GAMIT/GLOBK相比,该软件更适合GPS工程控制网平差计算。
2.2 CosaGPS控制网平差
利用GAMIT软件进行基线解算,可输出Q文件和O文件两种格式的基线解算结果文件,每个文件中均包含两处基线向量数据,第二处是CosaGPS网平差所需的数据。为使CosaGPS软件能直接调用该部分数据,需要在该数据的上一行加入CosaGPS识别标志。本文以Q文件为例,说明如何调用该部分数据。
1)打开Q文件,找到第二处基线解算成果文件如下:

2)在该文件第一条基线的Baseline vector的前一行加入cosagps for gamit q-file识别标志点,保存即可。
3)打开CosaGPS软件,新建工程名称,设置存盘路径、选择控制网等级和坐标系统,基线类型选择gamit。
4)输入已知数据,可通过登陆itrf.ensg.ign.fr网站输入日期下载所需的IGS跟踪站三维空间直角坐标值,并将其作为已知点录入到CosaGPS软件。
5)读取gamit基线数据,形成独立基线文件,再进行三维向量网平差,输出待测点成果即可。具体解算步骤可参考CosaGPS软件说明书。
3 历元框架转换
经过CosaGPS网平差后可输出待测点三维空间直角坐标,需对三维空间直角坐标进行历元框架的转换,精确求取其在历元2000.0、ITRF97下的CGCS2000坐标。目前市面上有免费的大地测量工具集和一些测量小程序可供使用,本文采用西安测绘研究所刘光明老师编写的CGCS2000坐标转换程序集,具体步骤为:①利用微块体欧拉矢量法计算待测点测站速度值;②将当前坐标历元归算至2000.0历元;③在2000.0历元下进行不同参考框架间的转换,先查看已下载的IGS站坐标值文件中的参考框架,再登陆itrf.ensg.ign.fr网 站,点 击Transformation Parameters下载当前参考框架对应ITRF97的转换参数,最后输入到程序集中进行不同参考框架转换;④将CGCS2000三维空间直角坐标转换为高斯平面直角坐标和WGS84坐标即可。
4 高程拟合
4.1 EGM2008模型简介
EGM2008模型是一个完全阶次为2 190的全球重力场模型,基本网格分辨率为5′×5′,在全球范围内的精度可达13 cm,在我国大陆的总体精度为20 cm,我国西部地区为24 cm。因此,EGM2008模型具有很高的精度,是计算大地水准面高的首选地球重力场模型,可免费使用。
4.2 正常高计算
利用测区少量GPS/水准点和EGM2008模型进行似大地水准面精化,拟合得到待测点的正常高。该方法可达厘米级精度,能满足一般工程测量需求,详见实验数据分析。
5 实验数据分析
本文利用新疆乌什塔拉乡6个已知C级GPS点静态观测数据进行解算,观测时长为4 h,采样间隔为30 s,截止高度角为15°;利用IRKM、POL2、NVSK和LHAZ四个IGS连续运行基准站同天的观测数据进行联合解算,其中以IRKM、POL2、NVSK作为CosaGPS网平差的已知点,以LHAZ和6个C级GPS点作为检查点。网平差计算时,首先对求解的LHAZ站三维空间直角坐标进行检核(表1),合格后再计算6个C级GPS点的CGCS2000高斯平面直角坐标。对比数据如表2所示。由表1可知,CosaGPS软件解算得到的坐标与已知值的较差不超过1 cm,说明三维向量网平差结果精度较高,可进行下一步工作。由表2可知,通过历元框架、坐标转换求得的CGCS2000坐标成果点位误差最大为1.9 cm、最小为3 mm,外符合精度为1.5 cm,说明解算成果与原有成果符合度较好,精度较高。

表1 LHAZ站三维空间直角坐标解算成果比较表
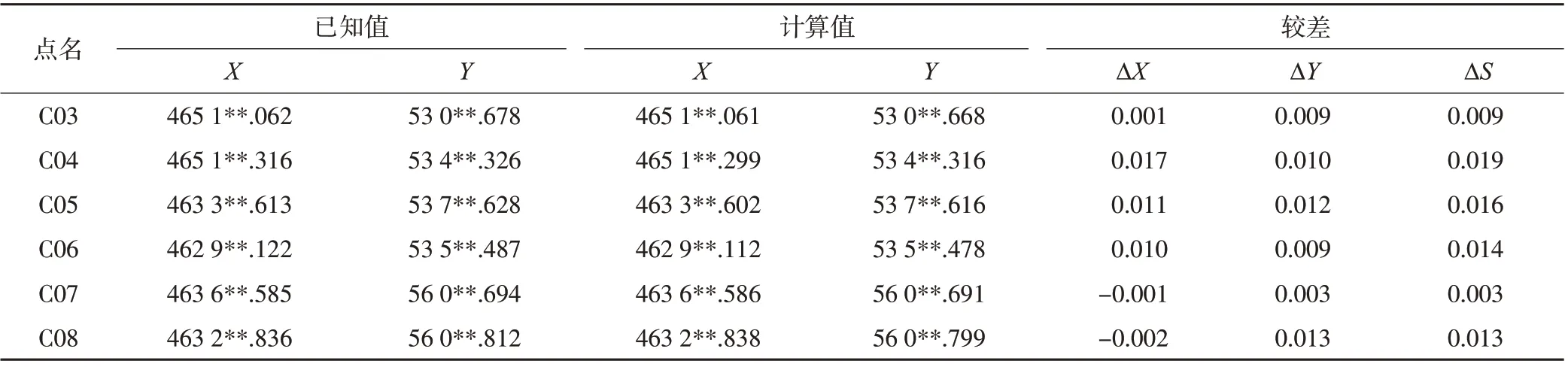
表2 GPS点CGCS2000解算成果比较表/m
GPS点正常高是基于EGM2008模型采用常数模型拟合的方式获取的,该测区跨度约为50 km,选取中央点C05作为已知高程点,计算得到另外5个GPS点的正常高,对比数据如表3所示,可以看出,高程拟合误差最大为5.9 cm、最小为-5 mm,外符合精度为3.8 cm,C级GPS点间距平均约为10 km。按四等几何水准的允许残差±20L判断,该方法得到的GPS拟合高程可达四等水准精度。
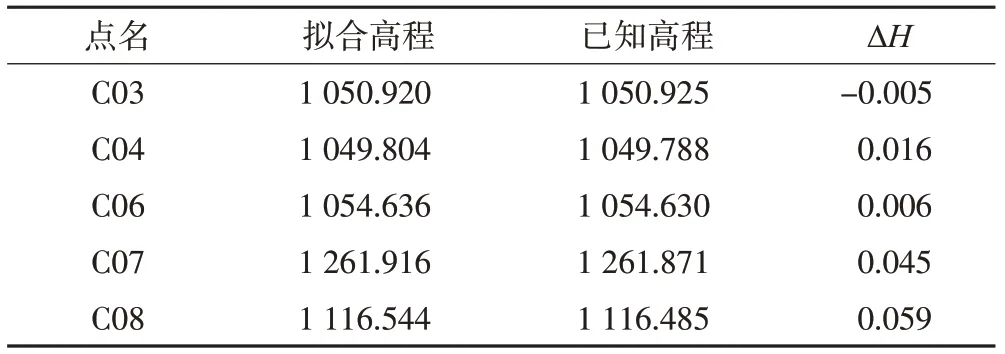
表3 GPS拟合高程比较表/m
6 结语
通过上述实验数据可知,在测区控制点稀少或无已知控制点时,可基于全球连续运行基准站和IGS跟踪站数据,利用GAMIT软件进行长基线解算,利用CosaGPS软件进行三维向量网平差;再通过历元框架、坐标转换精确求取待测点CGCS2000平面坐标;最后利用测区少量GPS/水准点和EGM2008模型进行似大地水准面精化,拟合得到待测点的正常高,高程精度可达厘米级,能满足一般工程测量的需要。该方法突破了常规工程控制测量联测已知点的瓶颈,大大缩短了工期,提高了工作效率,在精度满足规范要求的前提下可直接获取未知点CGCS2000平面坐标和高程,使测量方式多样化,克服了工程控制测量在复杂环境下的难点,是一种行之有效的方法,为实际工程运用提供了新的解决思路。
猜你喜欢
测绘学报(2022年5期)2022-05-31
导航定位学报(2022年1期)2022-02-17
科学(2020年5期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
全球定位系统(2019年4期)2019-08-30
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
导航定位学报(2016年4期)2017-01-05
舰船电子对抗(2016年5期)2016-12-13