
某型飞行器气动参数辨识与弹道仿真
2022-12-03 16:38梁明
上海航天 2022年5期
梁明
(中国人民解放军91851 部队,辽宁 葫芦岛 125001)
0 引言
随着计算机技术的不断发展,模型辨识方法与计算机技术相结合,使得模型辨识精度越来越高,在航天飞行器领域的应用越来越广泛[1]。本文建立了某型飞行器动力学模型结构,对气动力辨识输入参数进行了分析;采用迭代算法得出辨识参数,并对辨识精度进行了分析,认为主要是观测量测量误差、物理几何参数误差影响辨识精度。模型辨识的难点在于参数精度的分析和确认,本文在初步分析影响精度主要因素的基础上,将辨识得到的气动参数带入弹道仿真程序进行仿真验证。
1 建立某型飞行器动力学模型
1.1 理论分析
在建立模型过程中,将某型飞行器视为运动刚体,其在空间的运动可以分解为3 个线位移和3 个角位移,用6 自由度来进行描述,采取输入激励信号激发某型飞行器运动模态,从而辨识出该型飞行器的相关气动参数[2]。
某型飞行器助推器工作时间比总飞行时间要短的多,一般只有3~4 s,但助推器的推力很大,通常助推器推力产生的纵向过载可达15~18g,在助推器推力持续作用时,空气动力的影响几乎可以忽略,且助推段很难获得满足参数辨识要求的响应参数[3],因此本研究中不考虑助推器的推力。在上述条件下,某型飞行器6 自由度动力学数学模型为[4]

式中:Wxd、Wzd为风速在地面座标系的分量,Wxd=WcosψW,Wzd=-WsinψW,ψW为风向角。
气动系数的模型应根据某型飞行器气动外形的特点来确定[5],一般情况下可表示为
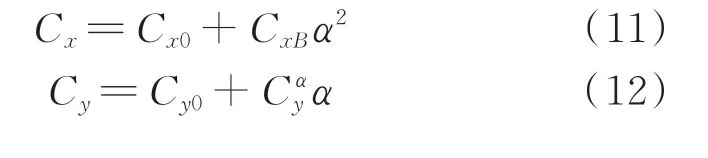
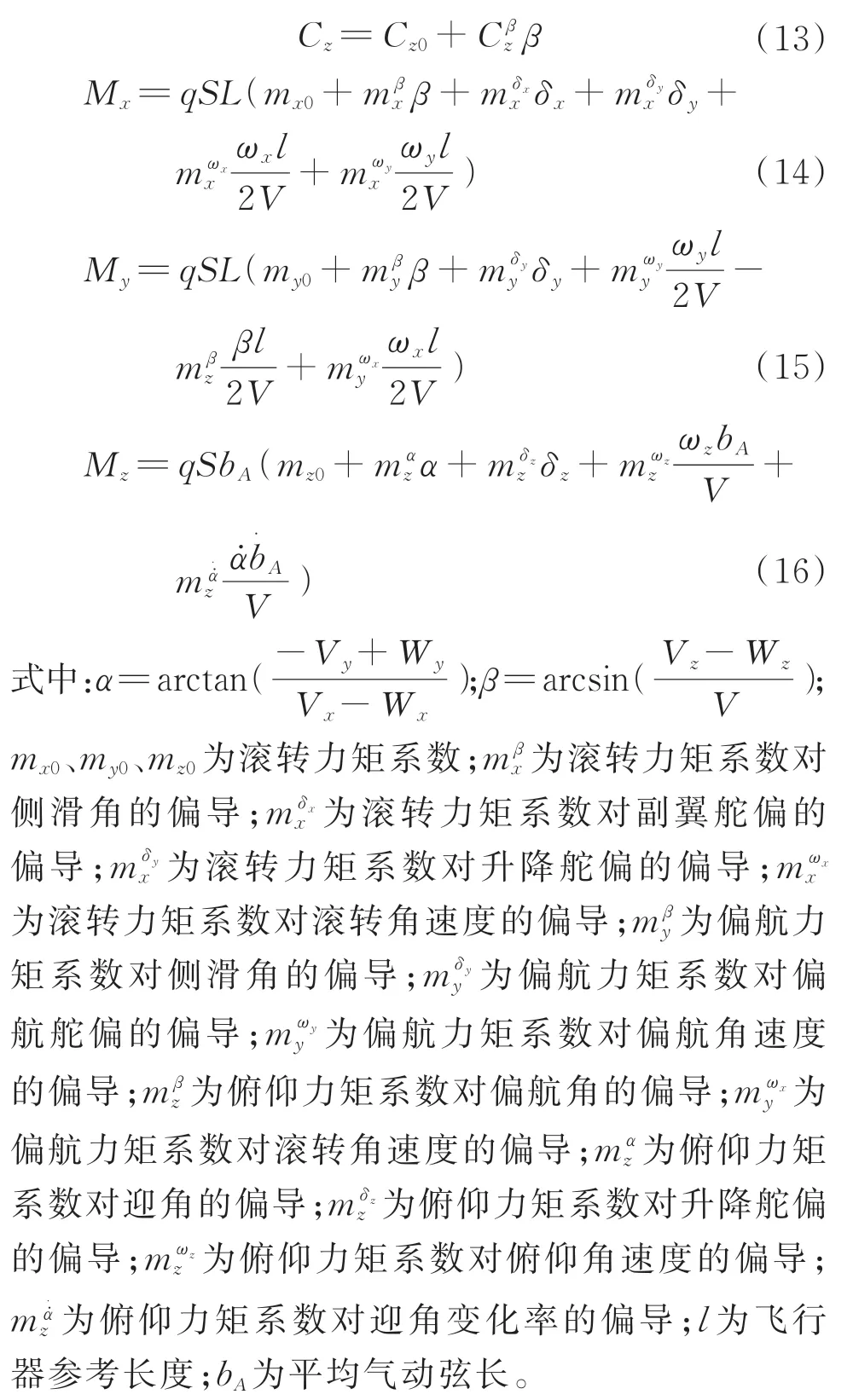
以上方程再加上控制方程就成为一个完整的方程组。某型飞行器的调节规律方程通常可表示为[6]
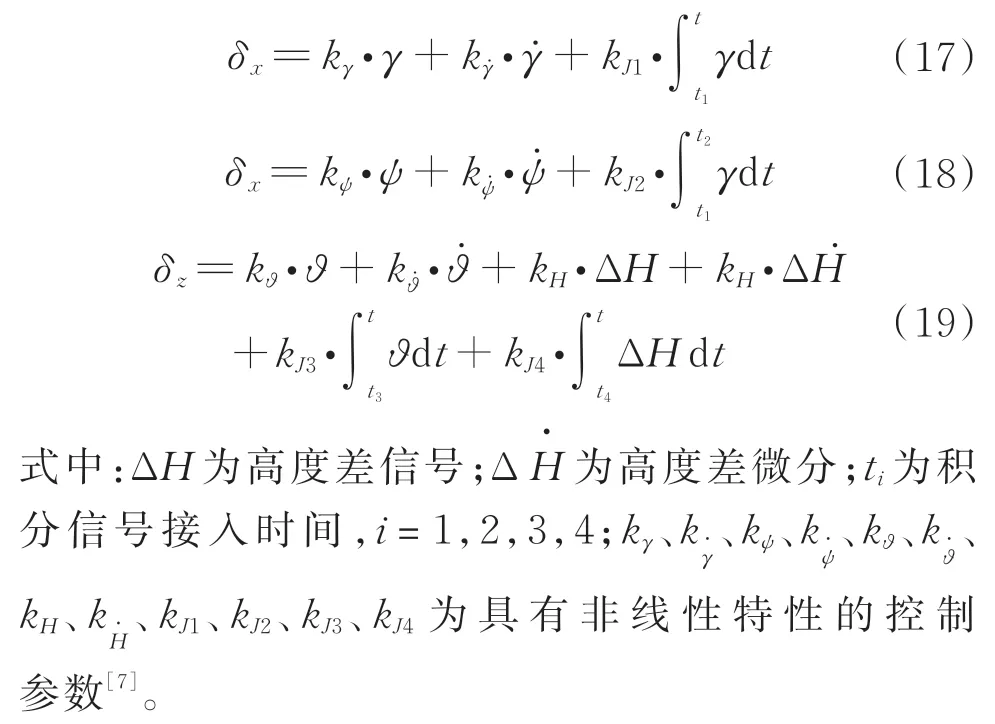
从调节规律的方程还可以看出,某型飞行器3 个通道的控制是互相独立的,正常飞行情况下,可以将6 自由度动力学数学模型,简化为纵向和侧向2 个3 自由度的动力学模型[8]。
1.2 辨识输入数据
1)导弹的结构参数:导弹质量m,转动惯量Jx、Jy、Jz,导弹质心XT、YT,参考面积S,平均气动弦长bA,参考长度l,传感器的安装位置等;
2)外弹道测量参数:导弹速度V、飞行高度h等;
3)气象测量参数:密度ρ(若密度无实测值可根据飞行高度计算)、风速W、风向角ψW等;
4)内弹道测量参数:舵偏角δx、δx、δx,导弹姿态角ψ、ϑ、γ,导弹转动角速度ωx、ωy、ωz,导弹轴向、法向、侧向过载Nx、Ny、Nz,发动机推力R,导弹攻角α,侧滑角β等。
2 迭代算法
采用牛顿-拉夫逊迭代公式[9]

式中的d修正量Δθk可由下列线性代数方程组计算[10]:
具体迭代过程为根据某型飞行器理论计算结果,给出待估气动参数的初值θ0,由状态方程、观测方程和灵敏度方程积分出某型飞行器的状态值x、观测值y和灵敏度阵;然后,解线性代数方程组求出Δθ0,再以θ1=θ0+Δθ0代替原来的θ0,重复以上计算过程,每迭代一次都需要计算似然准则函数Jk和Jk/Jk-1[11]。当时,则认为迭代收敛,此时的待估参数θk,即为所求的气动参数,一般情况下取ε=0.01[12]。
3 辨识精度分析
影响气动参数辨识精度的因素较多,归纳起来有以下几个方面:
1)观测量的测量误差。观测量的测量误差是影响辨识精度的重要因素[13]。利用飞行试验数据进行参数辨识时,观测量一般取导弹转动角速度ωx、ωy、ωz,姿态角ψ、ϑ、γ,导弹轴向、法向、侧向过载Nx、Ny、Nz,导弹攻角α,侧滑角β。分别由安装在弹体内部的角速率传感器、角位移传感器、过载传感器、攻角传感器及侧滑角传感器获得。通过遥测传感器获得时,零位漂移、死区、安装误差不可避免,但选择高精度的传感器可以使误差减小,为满足气动参数辨识的需要,遥测传感器应满足如下要求:
(1)噪声强度系数不高于1%;
(2)角位移传感器的零位漂移速度应小于每分钟0.1∘,角速率传感器的零位漂移小于峰值的0.2%,过载传感器零位漂移应小于峰值的1.0%;
(3)传感器的标定误差应小于0.3%;
(4)闭环飞行试验中,角速率、角位移、过载传感器的死区分别应在0.03(°/s,(°),g)的范围内;
(5)角速率传感器安装角的偏移度要小于0.1°,过载传感器安装角的偏移度要小于0.2°,过载传感器质心位置及安装位置误差要小于3.0 mm。
2)几何和物理参数的误差。几何参数包括特征长度、面积,物理参数包括惯性力矩、动压、质量,这些量中任何一个量值存在的误差,都会对气动参数估值产生相同的误差[14]。
4 参数辨识应用
4.1 可辨识性分析

若右端某一项远小于左端,则该项是不可辨识的;若左端接近于零,则该项也是不可辨识的,其余类同。
数据取自该型飞行器6 自由度85~86 s 的内、外弹道数据,数据包括:光测数据t、V、h、θ、ψc,遥测采样数据ωx、ωy、ωz、Nx、Ny、Nz、δx、δy、δz、α、β,弹体结构参数l、bA、S、m、Jx、Jy、Jz,气象数据ρ、W、ψW等。
为了分析这段数据的可辨识性,将动力学方程的各项分别逐项计算,结果见表1—表3。可以看出与各项的数量级相当,这表明纵、侧向气动系数均可进行辨识,可以采用6 自由度参数辨识的基本方程组进行辨识,表中数据还表明阻尼参数的数量级较小,会有较大的辨识误差[16]。
表1 辨识数据x表Tab.1 x table of identification data

表1 辨识数据x表Tab.1 x table of identification data
表2 辨识数据y表Tab.2 y table of identification data
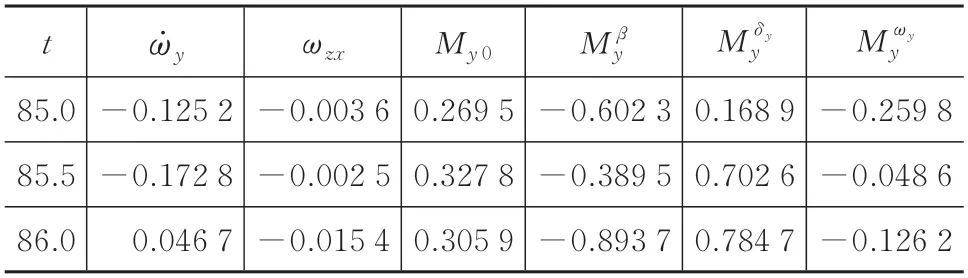
表2 辨识数据y表Tab.2 y table of identification data
表3 辨识数据z表Tab.3 z table of identification data
表3 辨识数据z表Tab.3 z table of identification data
4.2 辨识结果
采用极大似然法,对仿真数据采取参数辨识的基本方法进行辨识[17]。
状态变量为
观测量为

待估参数为

共辨识出21个气动系数,辨识结果见表4~表7。

表4 辨识结果(1~5)Tab.4 Identification results(1~5)

表6 辨识结果(11~16)Tab.6 Identification results(11~16)

表7 辨识结果(17~21)Tab.7 Identification results(17~21)
辨识得到的气动参数为计算飞行器弹道导弹飞行力学所需要的升力、阻力、侧向力,俯仰、滚转、偏航力矩系数及其对迎角、侧滑角、舵偏角的偏导。辨识得到这些气动参数之后,便可以对导弹的弹道进行仿真分析[18]。
5 辨识模型的弹道仿真
通过对该型飞行器控制系统和动力系统进行辨识,得出了部分模型辨识参数,下面验证这些实辨参数模型。
根据理论模型编写弹道仿真程序,可有效地计算该型号飞行器的控制弹道,并经过多次实弹飞行试验验证。验证结果表明,该理论模型精度较高,满足要求。
将实辨模型代入该型飞行器弹道仿真程序,替换原来的理论模型,进行弹道仿真计算。从仿真结果看,弹道变化平稳,与试验数据吻合较好,误差符合规定的范围,通过本方法得到的气动力参数精度已满足工程实际需要,实际辨识模型参数具有可信性[19]。Y方向仿真弹道如图1 所示,该弹道反映了某型飞行器初始正常爬高,按照预定程序下滑、稳定平飞、91 s 开始规避爬升、跃过目标舰后下滑入水自毁。
图1 Y 方向仿真弹道Fig.1 Simulation ballistics in the Y-direction
等效飞行高度曲线如图2 所示,该曲线反映了某型飞行器高度通道输出变化规律,从0~90 s 高度通道正常输出高度表测量高度,90 s 以后输出固定高度电平,从而完成安控规避。X方向仿真弹道曲线如图3 所示,该曲线反映了该型号飞行器纵向位移平稳。

图2 等效飞行高度仿真Fig.2 Equivalent flight altitude simulation
图3 X 方向仿真弹道Fig.3 Simulation ballistics in the X-direction
1~4 舵机仿真曲线分别如图4~图7 所示,4 条仿真曲线反映了某型飞行器舵机系统的变化规律,这4 个舵机系统动作对称性好,响应速度快,满足该型飞行器控制要求[20]。
图4 1 舵机仿真曲线Fig.4 Simulation curve of Servo 1
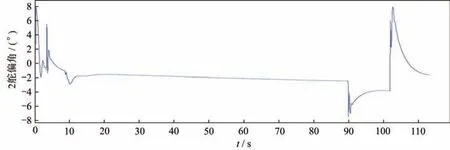
图5 2 舵机仿真曲线Fig.5 Simulation curve of Servo 2
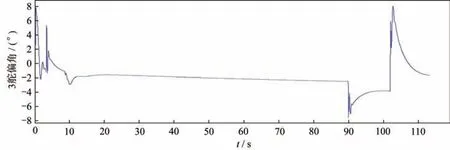
图6 3 舵机仿真曲线Fig.6 Simulation curve of Servo 3
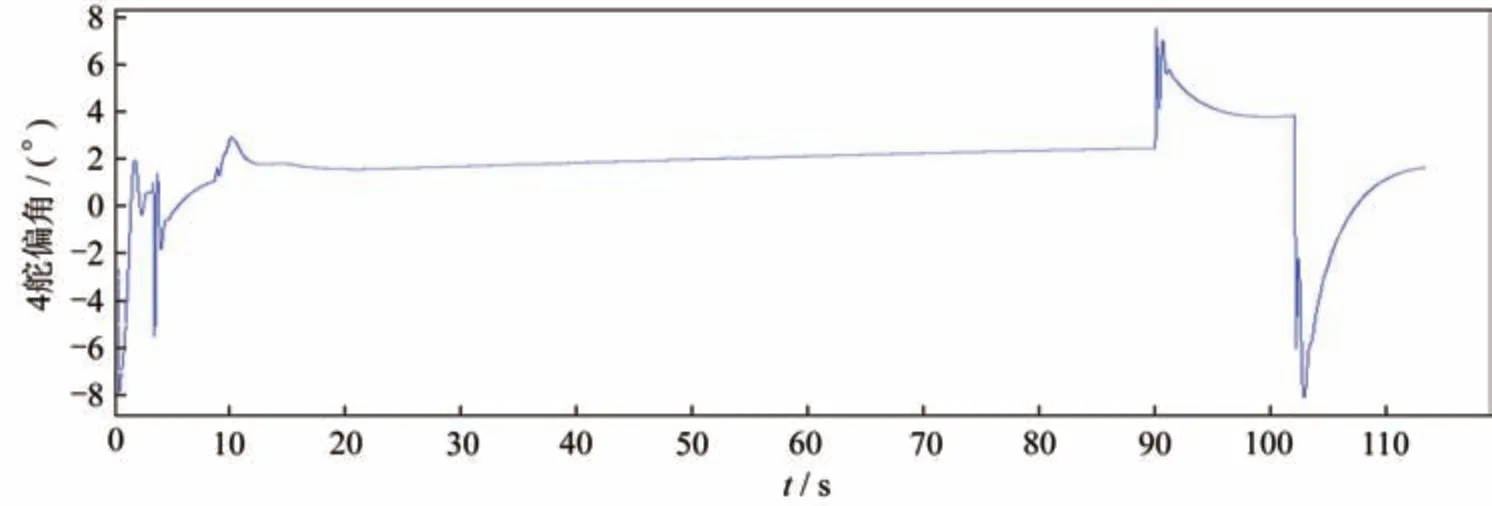
图7 4 舵机仿真曲线Fig.7 Simulation curve of Servo 4
6 结束语
本文介绍了一种飞行器气动模型参数辨识方法,利用该方法进行了飞行器的典型气动参数辨识,并将辨识得到的气动数据代入弹道仿真程序中进行验证。验证结果表明,该气动参数得到的弹道与实际情况吻合程度高,辨识精度较好。同时作为一种工程方法,该气动参数辨识方法使用较为方便,计算耗时较少,适合于多种工程场景,在工程领域有广泛的应用前景。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2021年6期)2021-07-20
自动化学报(2019年6期)2019-07-23
电子制作(2019年7期)2019-04-25
测控技术(2018年9期)2018-11-25
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
制导与引信(2016年3期)2016-03-20
弹箭与制导学报(2015年1期)2015-03-11
