超声速飞机层流布局设计与评估技术进展
2022-12-06 09:35袁吉森孙爵李玲玉于晟浩聂晗高亮杰韩忠华钱战森
航空学报 2022年11期
袁吉森,孙爵,李玲玉,于晟浩,聂晗,高亮杰,韩忠华,钱战森
1. 航空工业空气动力研究院 高速高雷诺数气动力航空科技重点实验室,沈阳 110034
2. 航空工业空气动力研究院 高超声速气动力/热技术重点实验室,沈阳 110034
3. 西北工业大学 航空学院 翼型/叶栅空气动力学重点实验室,西安 710072
4. 西北工业大学 航空学院 超声速客机研究中心,西安 710072
民用飞机自诞生以来,就以其快捷、舒适的特点成为人类出行的重要交通工具。但随着全球经济的发展以及国家之间交往的日益频繁,传统亚声速飞机已经难以满足人们对旅行速度的要求,发展飞行速度更快的超声速民机成为民航运输的迫切需求。早在20世纪70年代,以“协和”号、“图144”为代表的第一代超声速民机就已经研制成功,但这两种飞机油耗高、航程短、使用成本昂贵、声爆问题严重、安全性差,最终不得不退出了民航市场。此后世界多国提出了第二代超声速民机研究计划,诸如HSCT计划[1]、ESRP[2]计划等,但这些计划都并未付诸实践。近年来,新一代超声速民机因具有独特的旅行效率优势再次得到了国际航空界的普遍关注。世界各国纷纷掀起了新一代超声速民机的研究热潮,并制定了一系列研究计划,包括QSP计划[3]、“N+3”计划[4]、NEXST计划[5]等。
新一代超声速民机研制的重点在于解决声爆和经济性问题,因此需要突破的关键技术难题主要有:声爆预测及其抑制技术、超声速减阻技术、超声速变循环发动机技术、低声爆低阻布局与综合优化技术[6]。对于民用飞机,经济性是决定其能否成功投入商业运营的重要因素。相比于亚声速,超声速飞机因其升阻比大大降低,导致气动效率下降较为明显,如想成功在现代航空运输中得到广泛应用,巡航条件的减阻问题成为关键技术。与湍流流动相比,层流流动的摩擦阻力明显减小,如能在超声速飞机的表面保持更多的层流区,其巡航气动效率将大幅提升。
由于层流对于减阻的巨大潜力,航空界很早就开始了飞机层流流动技术的研究,形成了自然层流(NLF)、层流控制(LFC)和混合层流控制(HLFC)3种增强层流的技术手段[7-8],发展了数值模拟、风洞试验、飞行试验3种层流评估技术。亚/跨声速运输机布局的层流化的可行性已经在很多风洞试验和飞行试验得到了验证[9-11]。但对于超声速飞机,由于大后掠导致的强三维效应和高速的强可压缩性同时存在,层流设计相比于亚声速则具有更大的难度。而且高速边界层对表面缺陷、粗糙度、自由流湍流度和环境扰动十分敏感,在以层流增强为目标的设计优化任务中,必须准确地考虑这些可能因素。针对这一难题,国内外开展了超声速自然层流设计、流动控制和层流效果评估等方面的多项研究,并取得了诸多进展。
本文首先介绍了层流设计对超声速飞机气动效率提升的显著效益,然后阐述了超声速自然层流设计技术和流动控制两种有效的转捩延迟手段,接着简述了数值模拟、风洞试验、飞行试验3种层流评估技术,介绍了国内外典型的超声速层流布局设计与评估案例,最后总结了技术难点并给出了发展建议。
1 超声速飞机的气动效率
超声速飞机的巡航升阻比通常不足8.0,而亚声速运输机的巡航升阻比接近20.0,更小的升阻比意味着更多的燃料消耗和更高的飞行成本。如果在维持升力的条件下能够减少超声速飞机的总阻力,就可以提高升阻比,改善其经济性。
超声速飞机的主要阻力来源有:激波阻力、摩擦阻力、升致阻力、干扰阻力等。在超声速巡航(以马赫数2.0为例)条件下,激波阻力约占总阻力的20%,摩擦阻力约占40%,升致阻力约占35%,其他阻力约占5%[12]。因此超声速减阻的重点在于降低激波阻力和摩擦阻力。历史上对激波阻力的研究较为充分,建立了以机身面积律和后掠机翼为代表的典型布局形式。摩擦阻力在总阻力中占有很大的比重,因而通过层流设计技术来减小摩擦阻力对于超声速飞机气动效率的提升具有很大的工程意义。
洛克希德·马丁公司的Morgenstern等[4]给出了层流设计对N+3代超声速民机阻力系数和升阻比的影响,如图1所示。两者都是在马赫数1.6和5×104ft(1 ft=0.304 8 m)高度的巡航条件下进行评估的。随着层流范围的扩大,升阻比得到了明显地提高。如能保持40%弦长的层流范围就足以使升阻比提高约2.0;如能保持80%弦长的层流范围甚至可以使升阻比提高将近6.0。从图2可以看出,随着层流范围的扩大,燃油效率(红色线,定义为每磅燃油的乘客英里数)显著增加,最大起飞总重(深蓝色线)和燃油重量(浅蓝色线)显著减少。
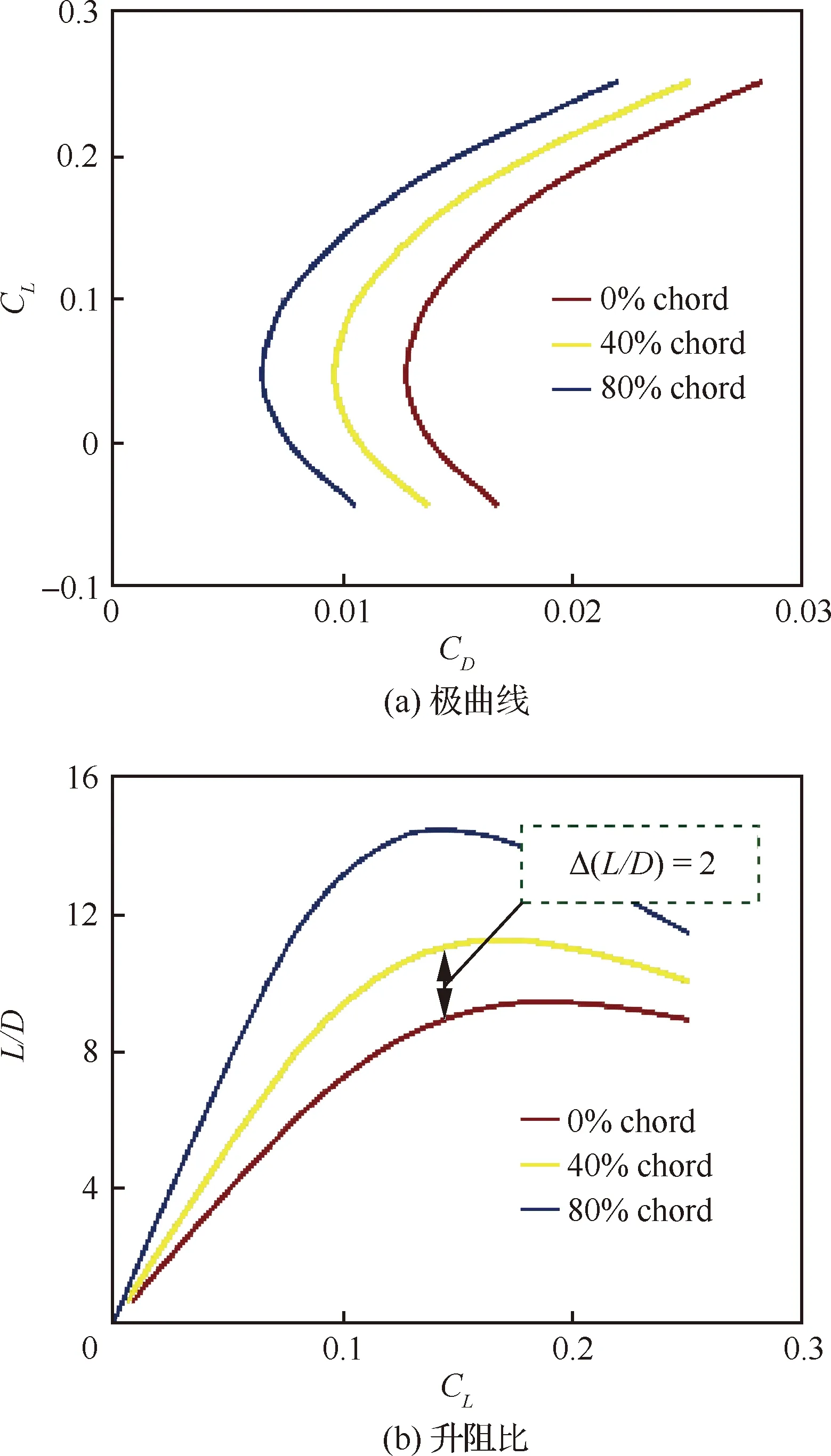
图1 3种自然层流水平下的巡航阻力极曲线[4]
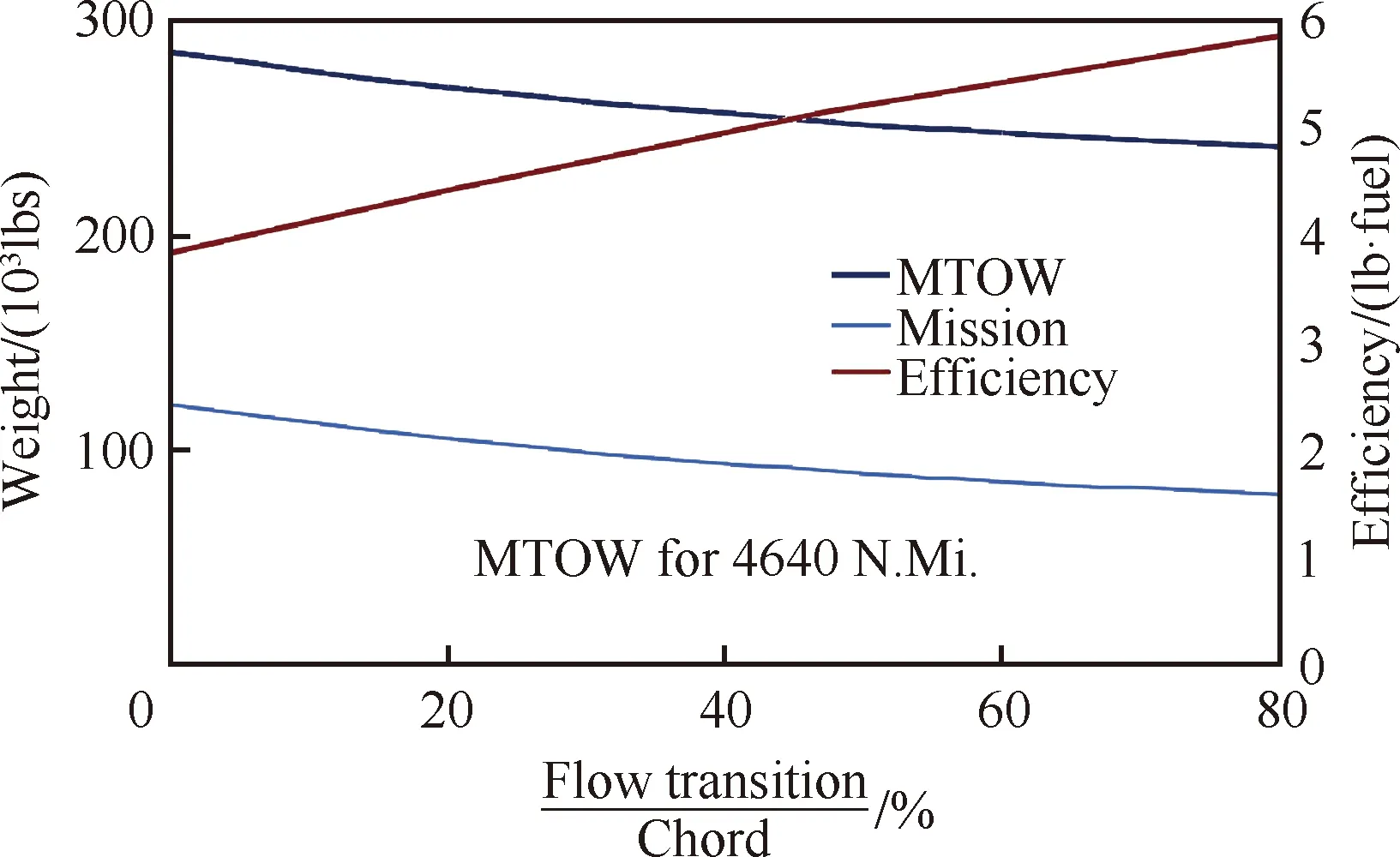
图2 自然层流带来的重量和燃油节省-恒定范围[4]
斯坦福大学的Sturdza[13]对巡航马赫数为1.5 的大型超声速公务机进行了层流效益评估,如图3所示。根据计算结果,将机翼层流范围从5%增加到80%,航程增加了近2 000 n mile(1 n mile=1 852 m),可以将一架仅能跨大西洋的飞机变为可跨越太平洋的飞机。图4是考虑5 000 n mile 固定航程的重量节省图[13]。从图中可以看出,将机翼层流范围从10%增加到80%,航程空重和起飞重量均可下降一半多。
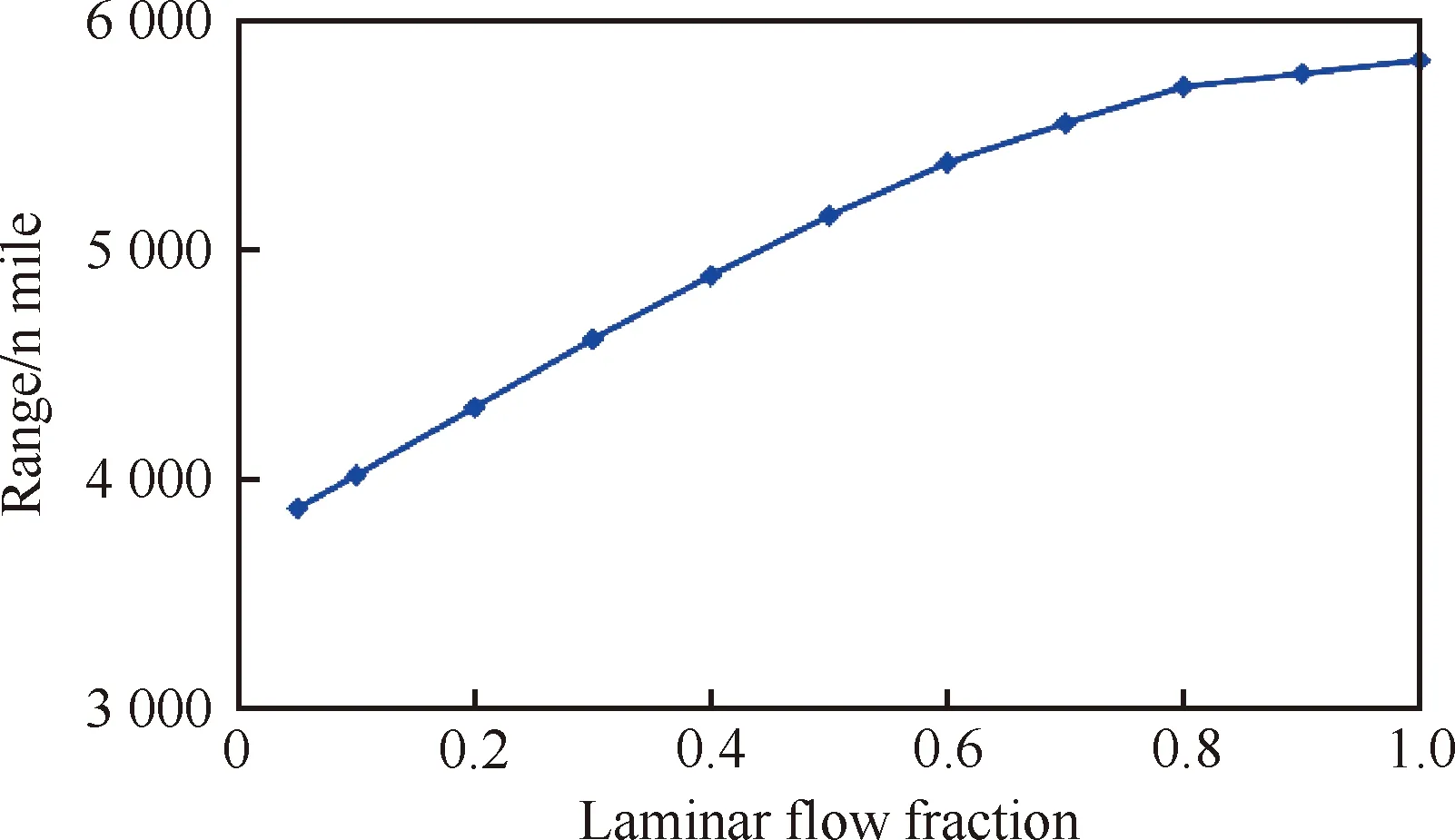
图3 层流对航程的影响[13]
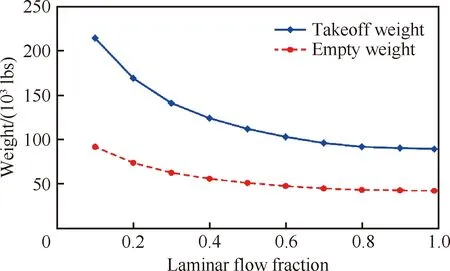
图4 层流对重量的影响[13]
综合来看,在保持升力和力矩特性相当的条件下,在超声速飞机表面维持更多的层流范围是提高其气动效率的重要途径,本文将针对超声速自然层流、流动控制和设计效果评估技术展开回顾。
2 超声速层流布局设计技术
2.1 超声速机翼的边界层转捩机制
对于超声速飞机,为了获得较低波阻的气动构型,采用后掠翼成为气动界的共识,经过多年的积累,大后掠翼布局已是超声速飞机的基本构型[14-15],故而当前的超声速层流布局设计主要针对该类布局来开展。对于超声速飞机的大后掠机翼,流动从层流向湍流转变的不稳定机制主要可归结为4类,如图5所示。
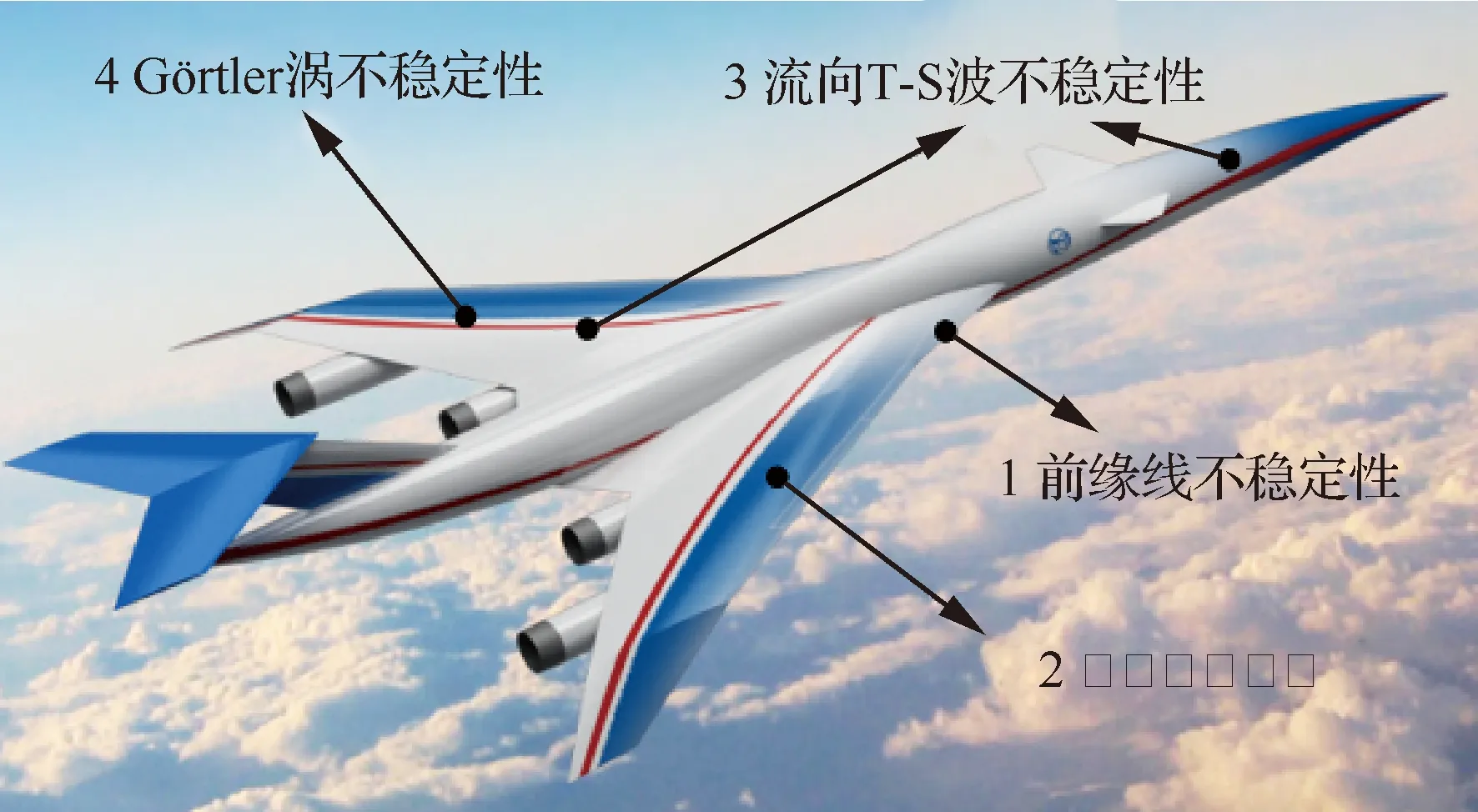
图5 超声速大后掠翼的4类不稳定机制
1) 前缘线不稳定性
前缘线[16-18],也叫驻点线,指的是机翼上静压最大的翼展方向线,它一般在靠近机翼前缘的位置,将气流分为上表面的一个分支和下表面的一个分支。对于后掠翼来讲,其前缘线也是一条空间后掠流线,如图6所示[19]。
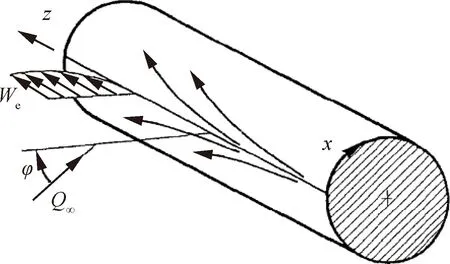
图6 前缘线示意图[19]
前缘线不稳定性(Attachment-line Instability)可分为两类:一是流动“自然”转捩。在前缘无污染的情况下,扰动亦可自激发展。如图7(a)所示[19],层流边界层在翼根附近的A点发展,然后可能在展向方向的下游变为湍流。二是前缘污染引起的流动转捩。靠近机身部位的翼根附近,机身的湍流边界层往往会沿着前缘线展向发展,如图7(b)所示[19]。由于其扰动较大,从而极易诱发转捩。
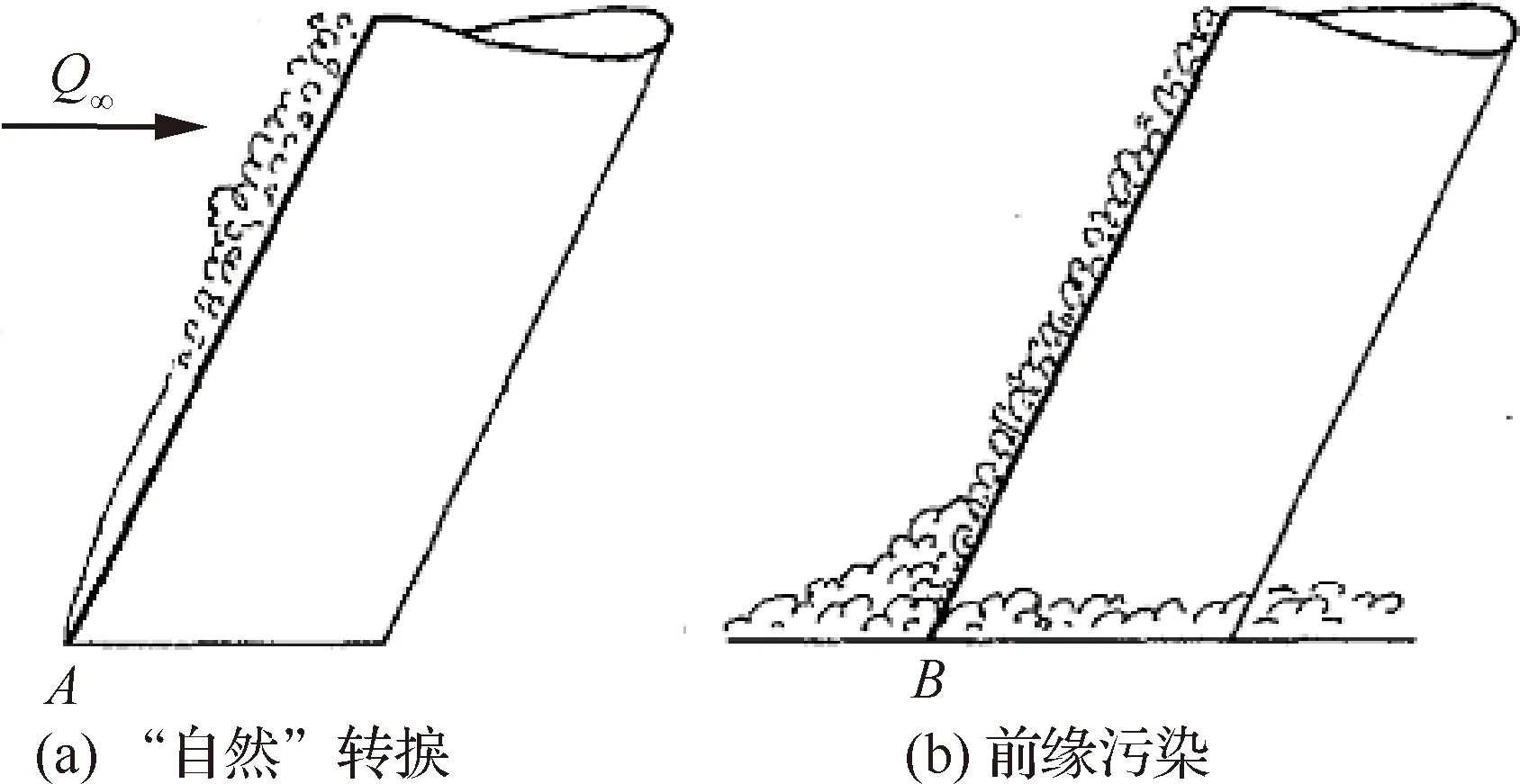
图7 “自然”转捩与前缘污染[19]
2) 横流不稳定性
后掠翼前缘附近存在着较强的展向压力梯度,使平行于机翼表面的无黏流线发生偏离;而在边界层内部,尽管越靠近壁面流向速度越小,但壁面法向压力梯度保持不变。因此,在边界层内部垂直于无黏流线的方向产生了二次流,称为横流[20-22]。图8显示了三维横流边界层速度剖面[22]。因为横流速度在壁面和边界层外必须为0,所以横流速度型必然存在拐点。拐点的存在提供了无黏不稳定性的来源,并且不稳定性表现为同向旋转涡流,其轴线与局部无黏流线呈一定角度的夹角。
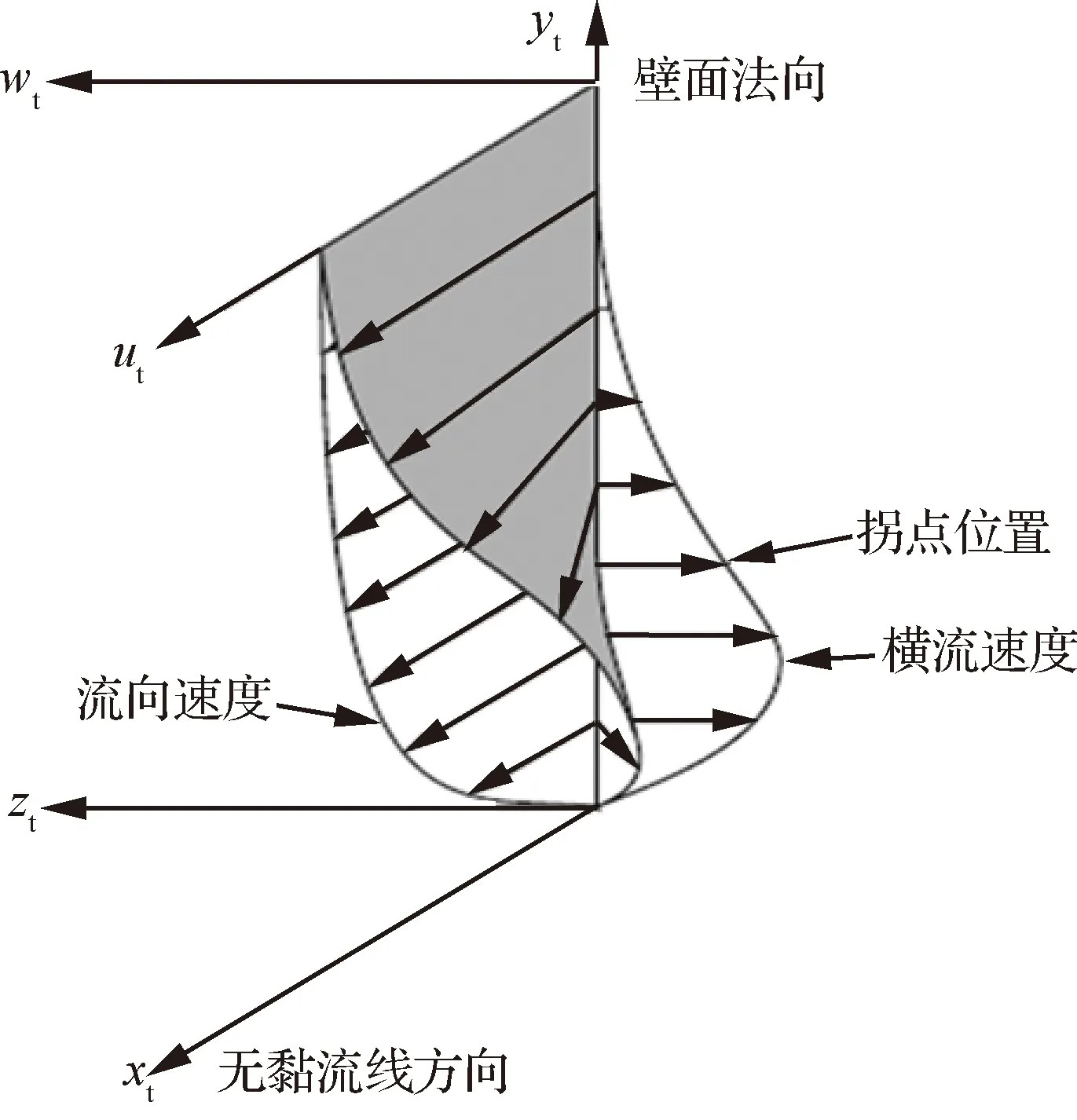
图8 三维横流边界层速度剖面[22]
横流不稳定性(Crossflow Instability)存在两种不稳定波(简称C-F波),一种是驻波(Stationary Crossflow Waves),一种是行波(Traveling Crossflow Waves)。前者属于定常扰动,物理上主要体现为表面非光洁带来的沿展向均匀分布的分离涡;后者属于非定常扰动,物理上主要体现为随流线向下游传播的声波扰动。根据边界层线性稳定性理论,行波扰动相比于驻波扰动具有更大的增长率,因而横流不稳定性应更多是由行波扰动引起。但线性稳定性理论分析是假设行波和驻波具有相同的初始扰动幅值。在实际的飞行试验和风洞试验中,哪种模态在边界层转捩中占主导地位取决于定常扰动和非定常扰动的相对幅值大小。对于飞行试验,来流湍流度很低,但飞机表面粗糙度较大,驻波模态可能占主导地位[23-24]。而对于风洞试验,来流湍流度往往较大,表面粗糙度不确定度也较大,两者都有可能[25]。
3) 流向T-S波不稳定性
T-S波[26-28]是流向平均速度剖面不稳定的结果,因其对应于Orr-Sommerfeld方程的不稳定特征值,也被称为模态不稳定性。通常亚、跨乃至超声速条件下,主导的是第1模态,在高超声速时才会出现高阶模态。T-S波不稳定性(Tollmien-Schlichting Wave Instability)主要与流向压力梯度相关,在顺压区域趋于稳定,逆压区域更趋于不稳定。
4) Görtler涡不稳定性
对于凹曲面,在离心力作用下会生成对转的旋涡,称之为Görtler涡[29-30],如图9所示[31]。Görtler涡的发展也可能会导致转捩发生,但对于超声速机翼,前缘区域基本不存在凹曲面,故一般不涉及Görtler涡不稳定性(Görtler Vortex Instability),只有机体的某些部位,如进气道压缩面、机翼后缘才有可能发生,设计中可单独予以考虑。
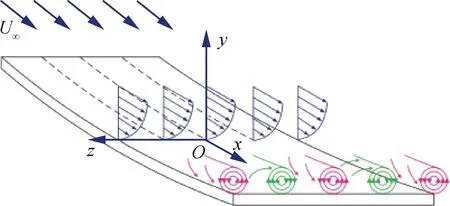
图9 凹曲面Görtler涡的示意图[31]
2.2 超声速机翼自然层流设计技术
要扩大机翼表面的层流范围,就要对以上4种不稳定性进行抑制。
1) 前缘线不稳定性抑制技术
通常超声速布局的基本构型都是机身机翼组合体形式,因而前缘线不稳定性必须考虑机身边界层污染。前缘线附近流动经过适当简化后,可归结为典型的带后掠Hiemenz流动。所谓Hiemenz流动指的是流动流向正对着的物体,从而发生滞止的现象,最简化的形式为气流撞击平板流动,如图10所示。如图11的气流撞击水平圆柱流动,也是Hiemenz流动的一种,本文研究的对象主要是如图6所示后掠Hiemenz流动。
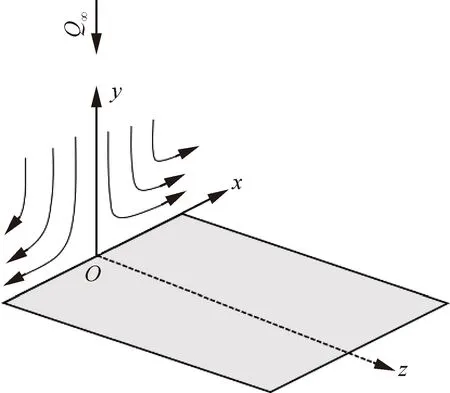
图10 平板Hiemenz流动示意图
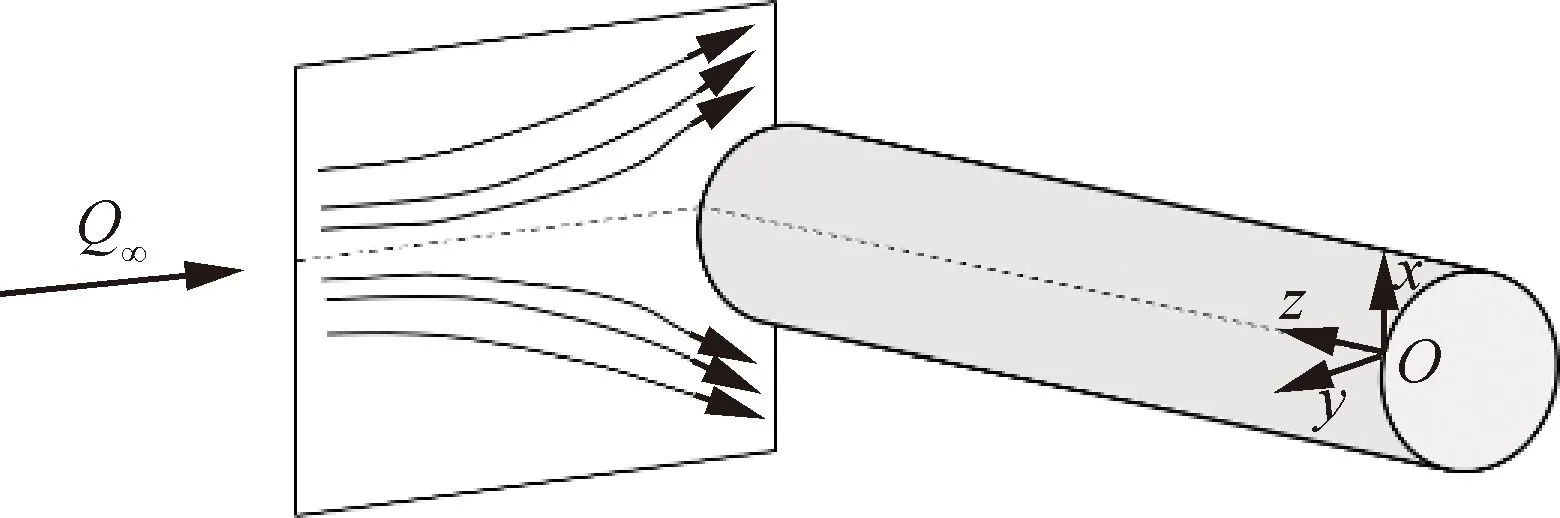
图11 圆柱Hiemenz流动示意图
带有机体边界层污染的后掠Hiemenz流动,其失稳机理还是比较复杂的,目前还未有精准的预测方法。前期Hall[32]、Theofilis[33]、Heeg[34]、符松[35]等采用线性稳定性分析方法开展了该类流动的转捩特性,为气动设计提供了一定的理论支撑。在实际设计中使用较多的是Pfenninger[36]和Poll[37-38]发展的方法,因其简洁便于引入布局设计,得到了较为广泛的应用。下面对这两种方法分别进行介绍。
Pfenninger在X-21的飞行试验中发现,后掠机翼前缘的展向湍流污染造成了机翼的层流损失,并且给出了污染发生的条件[36],即当ReθAL<100时,机翼可以始终保持层流;而当ReθAL>100时,在前缘污染作用下转捩就可能发生。这里,ReθAL=VeθAL/ν,其中ReθAL为前缘线的动量厚度雷诺数,Ve为自由流的展向速度分量,θAL为前缘线的当地动量厚度,ν为运动黏度。对于后掠圆柱,该表达式可改写为
(1)
式中:U∞为来流速度;R为前缘曲率半径;φ为前缘后掠角。

(2)

(3)
式中:ν*是参考温度下的运动黏度。
T*=Te+A(Tw+Te)+B(Taw-Te)
(4)
式中:Te是边界层边缘温度;Tw是壁面温度;Taw是绝热壁(恢复)温度;A、B为经验常数,通常取A=0.1,B=0.6。
Pfenninger和Poll提出的准则已经被许多风洞试验和飞行试验所验证[40]。根据这一准则,只要将前缘线雷诺数抑制在临界值以下,就可以有效防止前缘线转捩。
2) 流向T-S波不稳定性抑制技术
在研究T-S波不稳定性的Orr-Sommerfeld方程中,速度型曲率项d2U/dy2的正负是确定流动稳定与否的重要标志。壁面附近该项负值越大,边界层流动越稳定。由壁面附近边界层的动量方程可找出该速度型曲率项正负的方法,即可得出控制层流稳定的措施。动量方程为

(5)
式中:V0为壁面法向吹气速度(+为吹起,-为吸气);μ为黏性系数;T为温度。由此可见,∂p/∂x<0(顺压梯度)、V0<0(壁面吸气)、dμ/dT>0、∂T/∂y>0(壁面冷却)等为抑制T-S波不稳定性的可用措施[41]。
在自然层流设计中,主要考虑第1种措施,即顺压梯度控制。通过改变翼型的几何形状,使得机翼沿弦向的压力分布保持顺压梯度,即可有效地抑制T-S波不稳定性
3) 横流不稳定性抑制技术
随着机翼后掠角的增大,横流不稳定性会逐渐增强。理论分析表明,当机翼后掠角超过25°后,横流不稳定性将主导边界层转捩,而对于马赫数2.0级的超声速飞机而言,其机翼前缘后掠角通常达到65°。横流不稳定性是由横流速度型引起的,减少此速度分量可减弱不稳定性。对于给定的机翼前缘、后掠角和单位雷诺数,减少横流速度分量的唯一方法是减小弦向的压力梯度,但这又会增加T-S波的不稳定性,因此后掠机翼的自然层流设计面临既要抑制横流不稳定性,又要抑制T-S波不稳定性的压力分布设计问题[41]。另一方面,大型民用客机的飞行雷诺数较高,在高雷诺数条件下,横流不稳定性的抑制更加困难。
流向不稳定性和横流不稳定性受流向压力梯度的影响相反,在逆压区域,T-S波不稳定;在顺压区域,C-F波不稳定。由于机翼前部总是加速区(顺压区),加速区之后是减速区(逆压区),因此横流不稳定性主要位于前部,而流向不稳定性通常位于横流不稳定性的下游区域。对于后掠机翼,横流无法完全消除,只能尽量减弱其扰动幅值。如果能在前缘附近将C-F波抑制在临界值以下,然后在其下游采用微小的顺压或近似零压力梯度抑制T-S波,即可实现大范围的层流。同时考虑流向和横向不稳定性,需使得机翼沿弦向压力分布满足上翼面前缘吸力峰快速提升,继而沿弦向保持水平压力分布,即出现“平台区”。如图12所示,机翼沿弦向“平台区”占比越大,层流区就越大[42]。
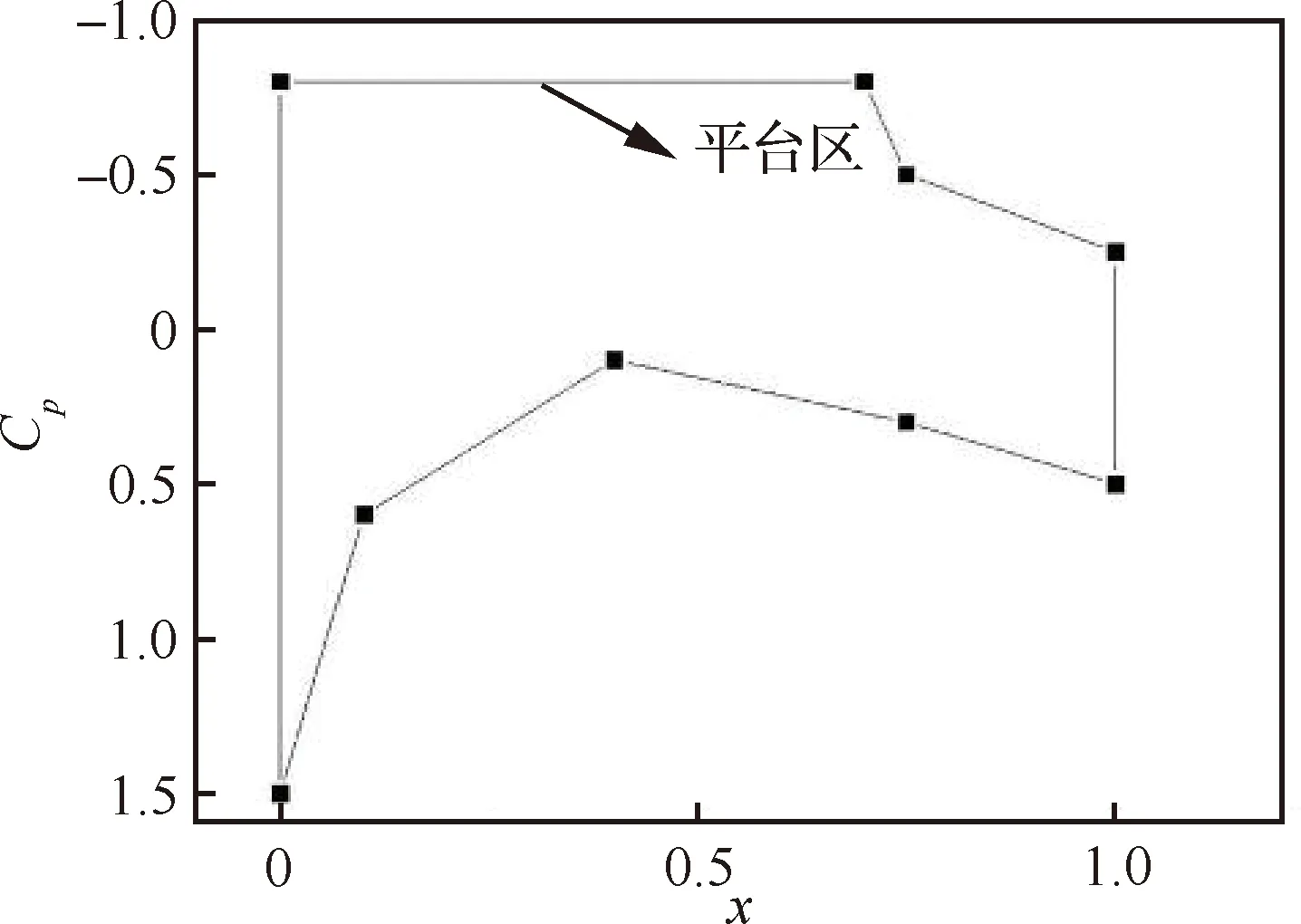
图12 机翼理想压力分布示意图[42]
4) Görtler涡不稳定性抑制技术
Görtler涡不稳定性发生于外形的凹面区域,是由边界层内的扰动在离心力的作用下发展成的Görtler涡引起的不稳定。凹面曲率大将助长此类不稳定性的发展,因此可以通过相应的外形设计即在表面进行曲率约束来消除凹曲面,从而规避Görtler涡的产生,对Görtler涡不稳定性进行有效抑制[41-43]。
综上所述,对超声速机翼开展自然层流设计的要点在于:
1) 该几何外形要控制前缘半径,避免前缘线污染引发的转捩,同时避免凹曲面设计,规避Görtler涡的产生。
2) 需要在满足其他流动约束(升力、俯仰力矩等)的条件下,对翼型几何外形和对应的压力分布曲线进行迭代优化,使得压力分布趋势既能满足对流向T-S波不稳定性的有效抑制,又能满足对横向C-F波不稳定性的有效抑制,从而得到满足合适压力分布的翼型几何外形。
3) 要整体考虑超声速飞机的自然层流设计,还需充分考虑机身、发动机等部件对机翼的综合影响,同时考虑机翼的厚度、安装角和扭转角等因素。
2.3 超声速层流保持技术
在自然层流设计的基础上,采用流动控制技术进一步延缓流动转捩,也是研究较多的技术,多年来人们提出了形形色色的控制方法。早期比较有代表性的是吹吸气技术,详见Joslin[44]的综述,但这些技术成熟度目前还不是很高,控制效果仍不是很理想,离实际工程使用均有着较大距离。近年来Malmuth等[45]提出的声学超表面技术、Saric等[46]提出的分布式粗糙元技术和Corke[47]提出的等离子体控制技术得到了越来越多的关注,本节作重点介绍。
2.3.1 声学超表面
1) 基本概念
声学超表面是一个表面具有亚波长尺寸微结构的层状材料。声学超表面技术延缓转捩是通过设计表面微结构的几何尺寸和排布方式,来调控模态扰动波的偏振、相位、振幅、频率等特性,从而抑制或破坏其增长或传播。
根据对扰动的抑制方式可分为两类声学超表面,一类是吸声型声学超表面,这类声学超表面可以耗散声波能量,进而抑制转捩。Malmuth等[45]最先提出使用超声波吸收表面来抑制转捩的方法,并由加州理工学院的Rasheed等[48]通过高超声速尖锥风洞试验验证了这一方法的正确性。
第2类是近零阻抗型声学超表面。这类声学超表面通过调控声波的相位,使壁面处的反射声波与入射波相位相反,实现相互抵消,从而抑制转捩。赵瑞等[49]考虑了相邻孔间干扰,详细分析了扰动和超表面的相互作用情况,提出可抑制Mack第2模态的近零阻抗型超表面。
2) 控制效果
赵瑞等[50]研究了缝隙型超表面(如图13所示)对单频、宽频第1模态的抑制作用,并进行了反向设计,给出了可以抑制第1模态的声学超表面要求。设计的声学超表面导纳相位θ接近0.5π,导纳幅值|A|在0~2范围内,在不同扰动频率下,各位置第1模态的增长率都有所降低,说明这一设计可以有效地抑制第1模态。
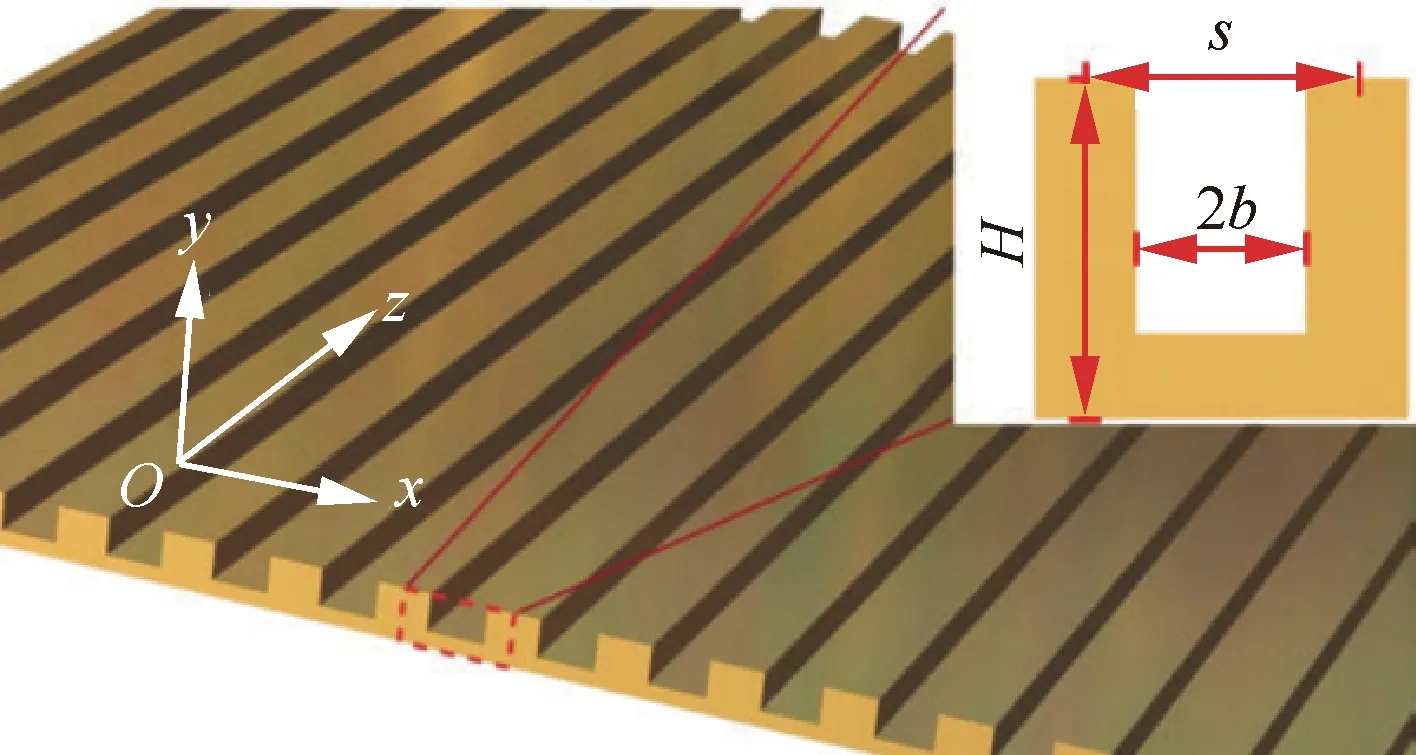
图13 缝隙型超表面的示意图[50]
随着进一步研究,王蔚彰等[51]对更大频率范围的第1模态和第2模态做出了分析,所得N值曲线如图14所示。发现设计的超表面在抑制第1模态的同时,会增强对第3模态的激发效果,并导致不稳定第2模态的频率降低,甚至在同一频率下同时出现不稳定的第1模态和第2模态。通过在不同频率范围内调节导纳相位和幅值,可实现宽频范围下同时抑制第1模态和第2模态扰动波。分析了超表面孔隙率、宽深比、深度等几何参数对导纳的影响,提出了一种可实现性宽频抑制的分段设计方案,并设计了两种相同深度拟合公式声学超表面。其中声学超表面A从0.05 m处开始每0.01 m分为一段;声学超表面B提高了工程上的可实现性,从0.05 m 处开始,每0.02 m分为一段。两种声学超表面的N值曲线如图15所示。两种声学超表面对第1模态的抑制效果基本相同,分段数更少的声学超表面B对低频第2模态的激发效果更显著。整体而言,两种声学超表面均可以在宽频范围内同时抑制第1模态和高频第2模态,且不过分激发低频第2模态。
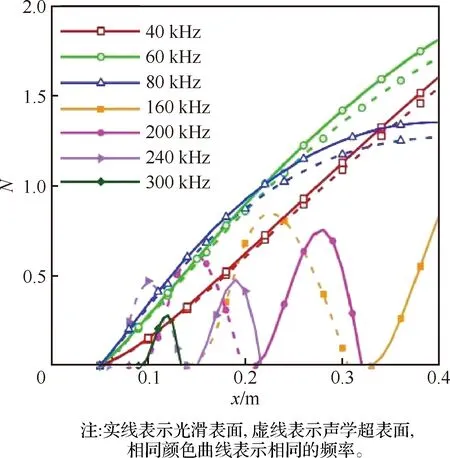
图14 声学超表面与光滑表面的N值曲线对比图[51]
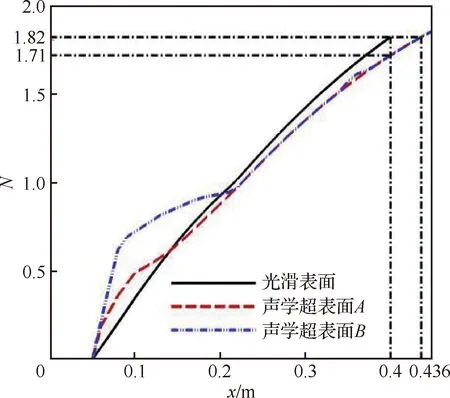
图15 声学超表面与光滑表面N值包络线对比[51]
3) 技术重点
声学超表面的技术重点在于声学超表面的设计,也就是声导纳参数的确定,对于超声速机翼设计,一般情况下仅考虑第1模态即可,在该马赫数下第2模态还未出现。
声学超表面的声导纳取决于壁面材料特性、孔隙率、壁面平均流动特性以及扰动参数。设计声学超表面首先要选择合适的声学超表面微结构类型,然后对流场进行稳定性分析,并引入超表面声学特性关系式,得到边界层中小扰动的色散关系,确定能够延迟转捩的声导纳幅值和相位。最后通过调节声学超表面的孔隙率、宽深比、深度等几何参数得到目标声导纳,达到延迟转捩的目的。
2.3.2 分布式粗糙元
1) 基本概念
分布式粗糙元(Distributed Roughness Elements,DREs)控制技术是指在机翼前缘附近放置一排沿展向的周期性粗糙元阵列来产生振幅均匀的定常横流涡。在大多数情况下,分布式粗糙元的添加会给边界层引入额外的扰动,促进转捩的发生。但当粗糙元的参数经过精心设计后,却有可能抑制横流不稳定性,从而延迟转捩。
在飞行环境和低湍流度风洞中,后掠翼的横流转捩由驻波主导。其扰动发展机制为,小波长扰动会率先增长,但会沿着下游的运动逐渐衰减,随后大波长扰动发展起来,沿流向在很长的距离内保持着不稳定,甚至通过二次失稳而发展成转捩。Reibert等[52]发现,在机翼前缘附近放置一排粗糙元可以激发相应波长的驻波模态。如粗糙元的间距为λ,则激发的扰动波长为λ,λ/2,λ/3,λ/4等,不会激发中间波长或波长超过λ的扰动。基于此,Saric等[46]提出可通过在前缘附近展向周期性地布置粗糙元来强制增大小波长扰动,使得大波长扰动的增长延后,从而达到延迟转捩的效果。在亚利桑那州立大学(ASU)的低湍流度风洞试验[46]和Cessna O-2外挂的飞行试验[23]中, DREs的控制效果均得到了验证。NASA的Owens等[53]进一步将DREs应用到超声速流场中,也观察到了后掠机翼上的转捩延迟。
2) 控制效果
Owens等[25]于2014年在SWT风洞中研究了DREs在超声速条件下对横流转捩的控制效果,发现临界间距能够引起转捩提前,而亚临界间距并未使得转捩延迟。Owens将亚临界间距的无效性归结于粗糙度高度,表示需要进一步研究粗糙元高度对转捩的影响。之后于2019年Owens等[53]在风洞试验和飞行试验中证实了,合适的DREs对超声速后掠翼的横流转捩是有延迟效果的,如图16和图17所示。在风洞试验中,有效的DREs控制将层流扩展了30 mm(约为弦长的5%);在飞行试验中,有效的DREs控制将层流扩展了25~30 mm(约为弦长的4%~5%),效果与风洞试验基本相当。
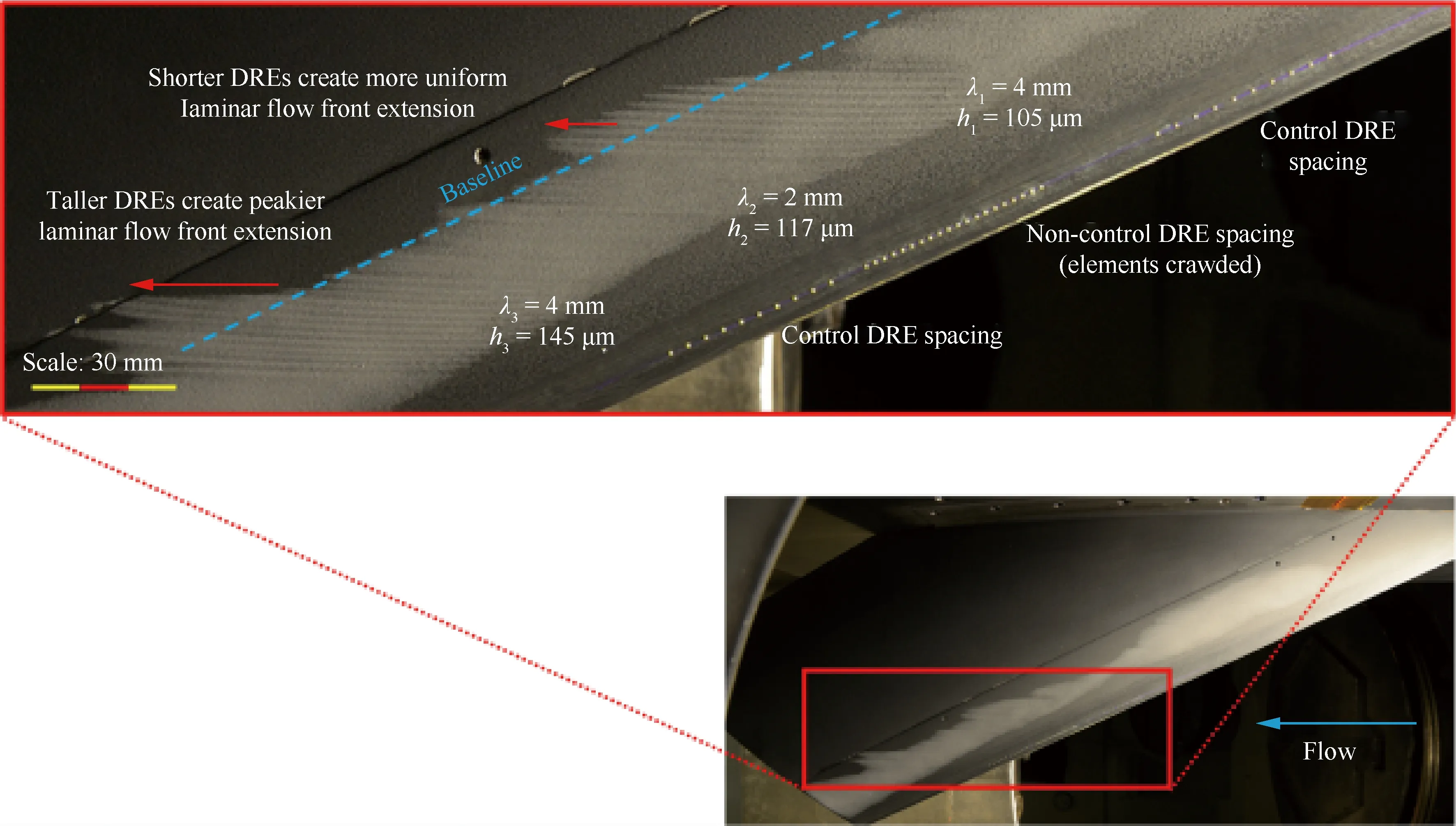
图16 DRE控制效果的风洞升华技术显示[53]
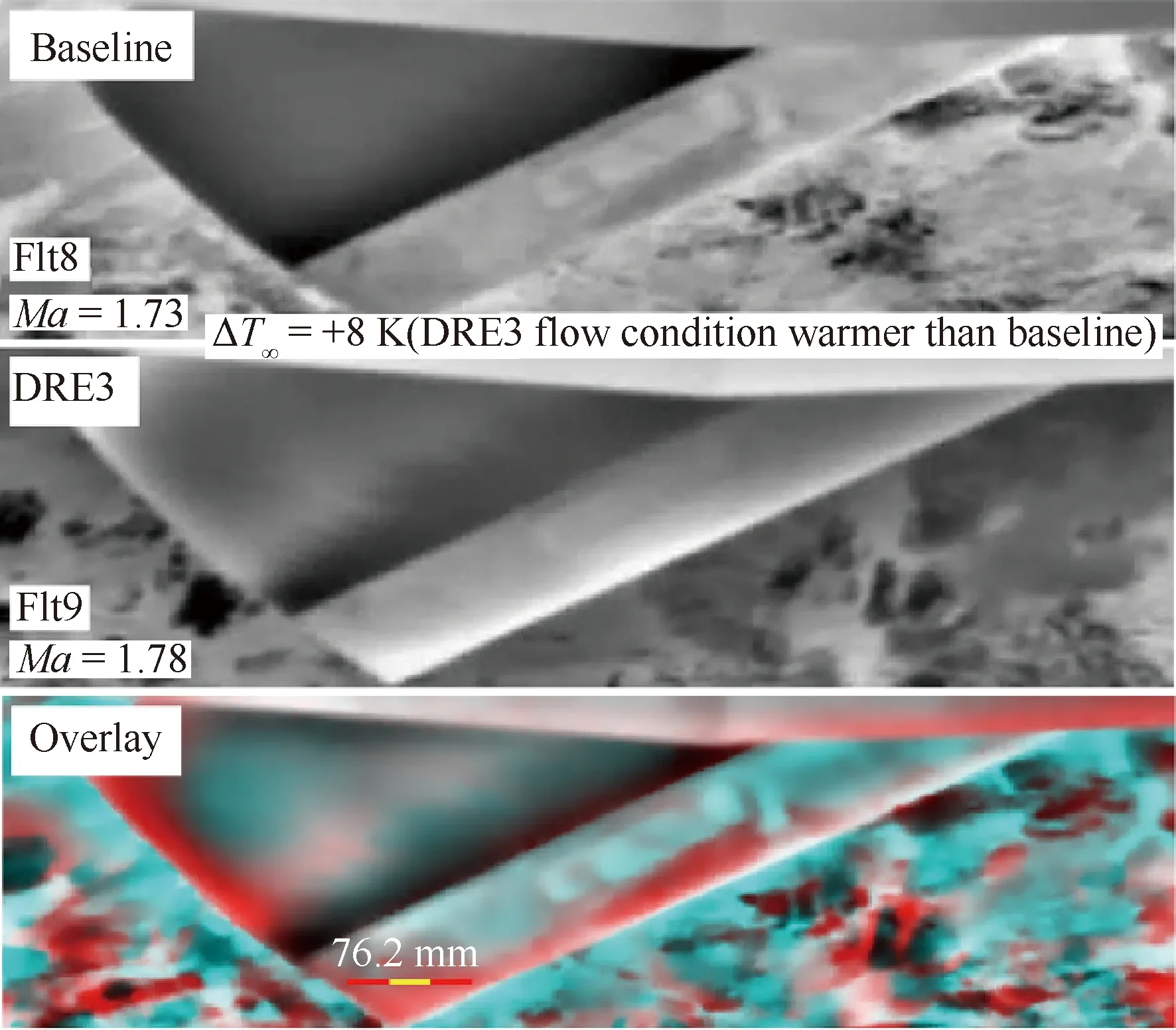
图17 DRE控制的飞行红外图像[53]
Owens等[53]的研究表明,精心设计的DREs在超声速条件下同样具有控制效果,但30 mm(5%弦长)的层流增加效果并不能满足超声速飞机的层流需求。如果将DREs的作用从扩展层流的角度转变为保护已建立的层流区域免受机翼前缘背景表面粗糙度增加的负面影响,那么DREs将有助于保持自然层流设计的结果。因为目前的自然层流设计技术并没有考虑到机翼前缘表面粗糙度的影响,实际上,机翼前缘总是存在随机的背景表面粗糙度(昆虫污染、油漆、磨损等)。因此,如能将分布式粗糙元层流保持技术有效地整合到超声速自然层流设计中,将会使设计的层流区域免受环境因素的影响。
3) 技术重点
分布式粗糙元的技术重点在于选择合适的粗糙元参数(包括位置、间距、直径、高度等)。根据目前已知的研究结果,可大致总结为以下几条准则:
1) 粗糙元的位置最好放置于中性点附近,对于后掠机翼一般位于2%~5%弦长的前缘处。靠前或者靠后都会削弱粗糙元的控制效果。
2) 粗糙元的间距应小于最不稳定波的波长(临界波长),一般选取临界波长的2/3。间距超过临界波长,会产生强烈放大的波,促使转捩提前发生;间距过小,粗糙元之间互相干扰导致控制效果减弱。
3) 粗糙元的直径一般为0.2~0.3 mm。直径太小不易实施,太大会使得间距效应减弱,并有可能诱导转捩。Owens等[53]的研究表明临界波长的展向分量与直径的比值应大于2.7甚至更高。
4) 粗糙元的高度是最难以确定的参数。高度过低控制效果不明显,高度过高可能直接诱导转捩。Saric等[24,46]的经验表明在亚声速条件下h/δDRE=0.05~0.1(约12~25 μm)时最有效;Owens的经验表明[53]在超声速条件下h/δDRE=0.4~0.6(约100~150 μm)时最有效。其中h为粗糙元高度,δDRE为粗糙元所在位置的边界层厚度。值得注意的是,在飞行试验的高雷诺数下,与风洞中同等高度的粗糙元会直接诱导转捩,故将高度降低到h/δ=0.1(约为25 μm)最为有效(不同雷诺数略有不同),h/δDRE=0.3时无控制效果,转捩未得到延迟。
2.3.3 等离子体控制技术
1) 基本概念
等离子体流动控制是基于等离子体气动激励的主动流动控制技术,其主要特点为没有运动部件、响应时间短、激励频带宽[54]。根据放电原理、等离子体特性的不同,等离子体气动激励可分为介质阻挡放电(DBD)、电弧放电、电晕放电以及其他新型等离子体气动激励。其中DBD等离子体流动控制是最为常用的等离子体控制技术,其基本原理如图18所示[55]。
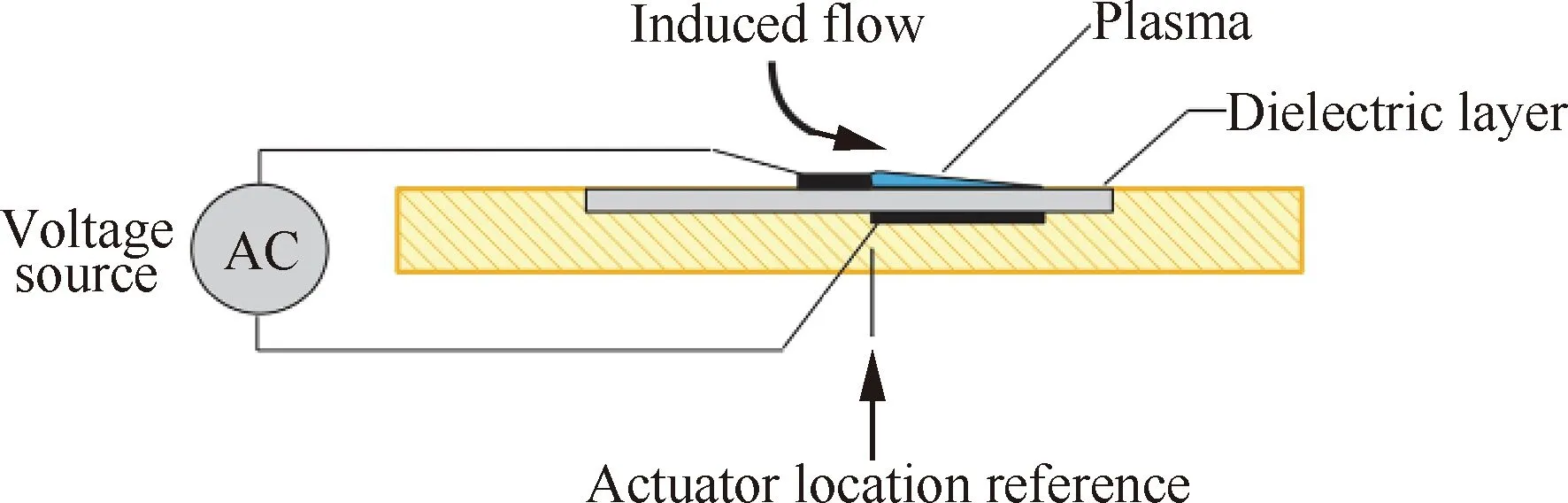
图18 DBD等离子体激励器示意图[55]
DBD等离子体激励器由两个电极组成, 一个电极暴露在空气中,另一个电极被电介质材料覆盖。当在这两个电极之间施加高压交流电后,电极附近的空气会被电离,产生体积力作用于周围空气,形成诱导气流。通过适当地配置两个电极,等离子体可以诱导任意形状和方向的气流。
Corke等[56]使用DBD等离子体激励器制作了流向涡发生器,用于产生类似分布式粗糙元的效应,来控制定常横流模态。如图19所示,激励器由“梳状”电极组成,这些电极与电介质层下侧的单个总线电极重叠。等离子体被设计成在“梳状”电极的边缘与下部总线电极重叠的区域中形成。这就产生了一个体积力矢量场,作用于每个梳状电极附近的中性气流。体积力矢量场被设计成引起反向旋转涡流的形成,该涡流类似于由分布式粗糙元产生的涡流。“梳状”电极的间距被设计成激发临界或亚临界定常横流模态。Corke等[56]随后在后掠翼模型上进行了试验,证明了该控制技术对于抑制横流不稳定性的有效性。
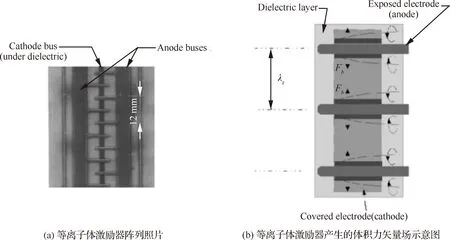
图19 等离子体激励器阵列[56]
2) 控制效果
Serpieri等[57]在后掠翼上使用展向调制等离子体激励器,实现了定常横流模态的选择性强迫,并且发现在亚临界强迫中横流不稳定性的增长小于临界强迫。Dörr和Kloker[58]采用DNS研究了等离子体激励对后掠平板横流不稳定性的控制效果,通过沿三维边界层的局部平均流动方向放置一排等离子体激励器,可以对横流产生体力以减小速度分量,同时激发亚临界模态。但这些研究都是在低速条件下进行。
Schuele[59]通过实验研究了超声速条件下微米大小的等离子体激励器方位角阵列产生的“主动粗糙度”对4.2°迎角尖锥边界层中定常横流模态的激发。图20(a)给出了可拆卸锥尖的整体视图,图20(b)和图20(c)显示了等离子体激励器梳状电极的排列。
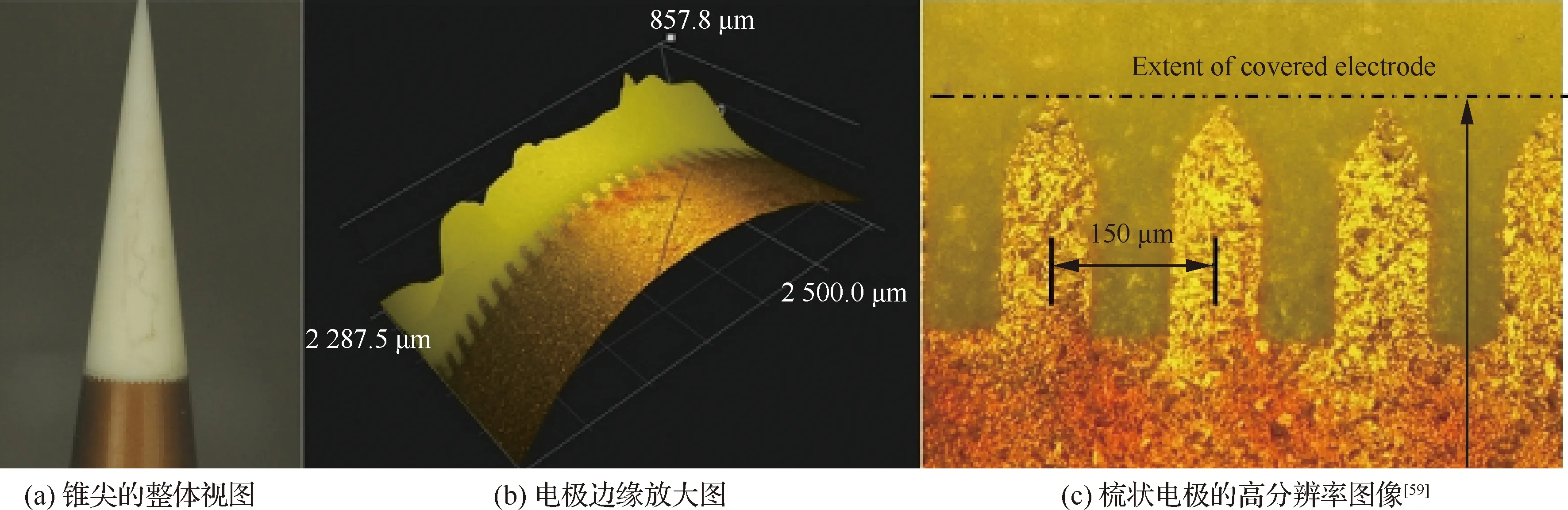
图20 带有锯齿边梳妆结构的锥尖[59]
基于线性稳定性计算,m=45被选择为临界波数,m=68被选择为亚临界波数。使用皮托管探头在不同轴向位置进行方位扫描,测量了x=5 in (1 in=25.4 mm)到x=9 in的5个不同轴向位置,增量为1 in,并比较了等离子体开启(红色曲线)和关闭(黑色曲线)的情况,m=68的测量结果如图21所示。
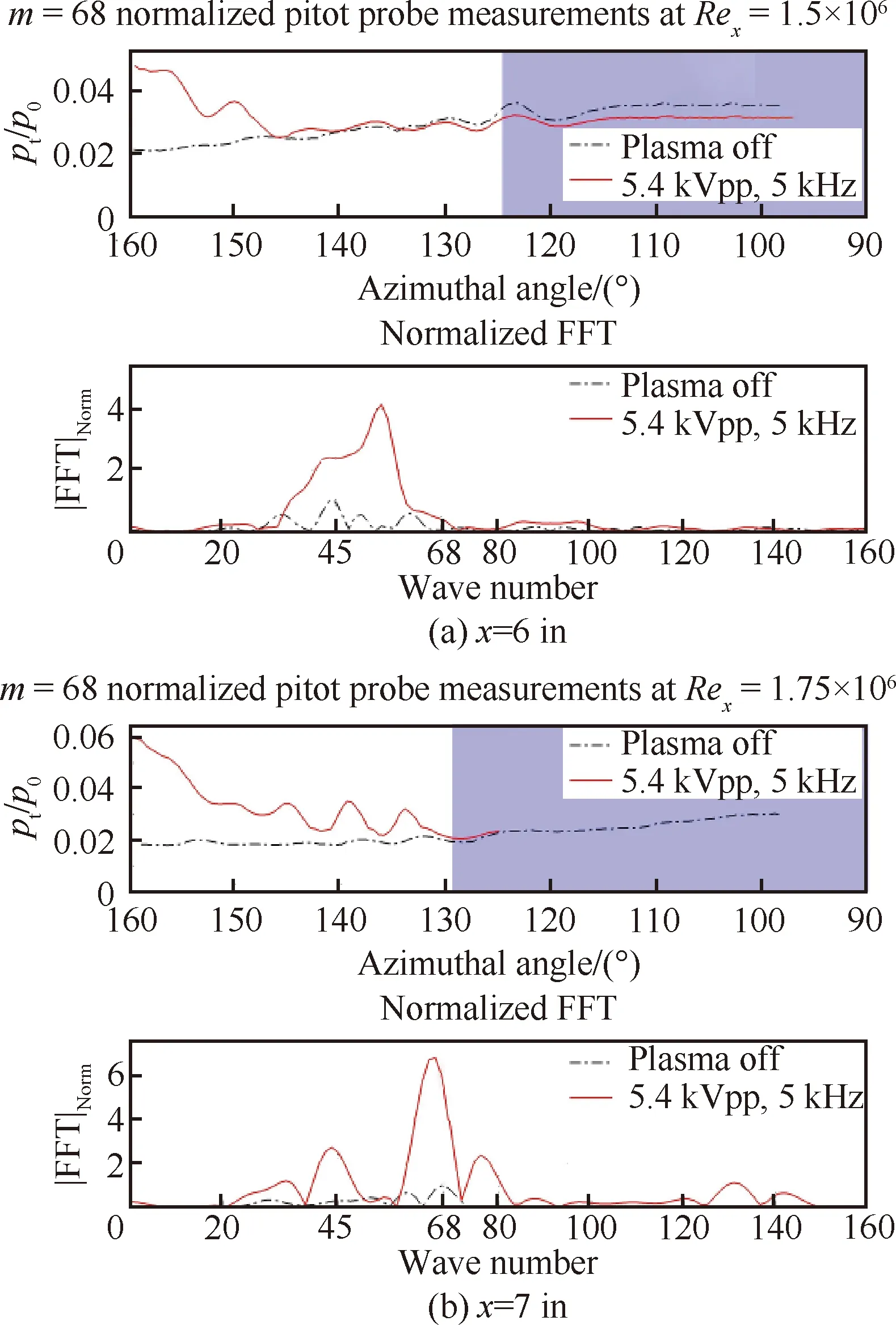
图21 m=68时不同轴向位置方位皮托管扫描结果[59]
从方位角总压的波数谱来看,在x=6 in时,m=68波数的能量略有增加,但仍小于m=55(线性理论预测的最大放大波数带);到了x=7 in,波数谱中的主峰已经非常接近m=68,而且这个峰值的幅度要远高于等离子体关闭状态;到了x=8 in,波数谱仍然显示m=68具有很高的能量,然而主要波数已经转移到线性放大范围之外的更高和更低的波数。
由此可见,等离子体激励器阵列的效果与分布式粗糙元类似,均能够通过激发亚临界模态,来衰减最不稳定模态的增长。
3) 技术重点
等离子体控制技术的重点在于产生稳定的展向均匀的流向涡流,通过强制增大亚临界模态的振幅,来抑制最不稳定模态的增长,因此等离子体激励器的布置与分布式粗糙元遵循的原则是基本一致的。除此之外,等离子体激励器的设计还有两点需要注意:一是避免等离子体激励器带来表面粗糙度的增加,进而直接促发转捩,特别是应用于弯曲表面时;二是在高雷诺数下,流动边界层物理厚度变薄,激励器的间距会很小,因此电极的物理尺寸也要足够小,这对实际应用将是很大的挑战。
3 超声速层流设计评估技术
超声速层流布局设计评估主要是对超声速转捩现象的精准预测。目前的评估技术主要有数值模拟技术、风洞试验技术和飞行试验技术,本节对其进行简要的介绍。
3.1 数值模拟
超声速转捩的数值模拟技术主要可分为直接数值模拟(DNS)、大涡模拟(LES)、间歇因子输运模型(RANS)和稳定性分析方法,DNS和LES方法因受制于计算量限制,目前仅用于简单外形的机理研究,稳定性分析方法和间歇因子输运模型方法是工程中常用的转捩特性评估方法,本节对其概念和实施方式进行简要介绍。
3.1.1 线性稳定性分析方法(eN方法)
稳定性分析方法是分析复杂系统动力学特性的典型方法。对于超声速转捩而言,需要判定的是Navier-Stokes方程的稳定性,已经发展的方法包括线性稳定性理论 (LST)、线性抛物化稳定性方程(LPSE)、非线性抛物化稳定性方程(NPSE)等。其中工程上最常用的方法是线性稳定性分析方法,也称为eN方法。
eN方法是20世纪50年代由Smith[60]和van Ingen[61]首先提出,基于LST计算扰动幅值的线性增长因子(N值)来判断转捩是否发生的预测方法。其主要思想是:对边界层中存在的小扰动进行线性稳定性分析,如果扰动最终衰减,则是稳定的;如果扰动幅值被放大,则是不稳定的。在不稳定的扰动向下游传播过程中,从其幅值开始放大处沿下游方向积分增长率可以得到幅值的放大倍数eN,取对数后为N值。当扰动的N值达到转捩判据NT时,则可判定转捩发生[62]。
在传统的eN方法中,NT主要依靠试验或经验来确定。对于航空飞行器来说,通过大量的风洞试验和飞行试验,确定NT的值一般取为9左右。在环境噪声比较小,且大部分扰动为线性波时,采用这种分析方法可获得比较理想的结果。但对于超声速情况,NT取值需要另行确定[63]。虽然基于线性理论的eN方法对NT的取值没有普适性,且忽略了非局部效应、非线性效应等,但该方法仍是工程界预测转捩最有效的方法。
目前eN方法在航空航天飞行器转捩预测中得到了广泛的应用,但是绝大多数是针对亚声速问题,少部分针对高超声速问题,相比而言针对超声速流动转捩开展的eN方法研究并不广泛。基于该方法发展出来的比较有代表性的转捩预测软件有eMalik软件、LASTRAC软件、PMNS3D软件等,这里简介如下。
1) eMalik软件
eMalik是美国国家航空航天局(NASA)的Malik等[64]基于LST编写的转捩预测软件。该软件开发时间比较早,功能比较简单,是最早公开报道的成熟转捩预测程序,可以对三维复杂外形的转捩问题进行预测。
eMalik软件在工程转捩预测中起到了重要作用。Berry等[65]曾使用eMalik对高超声速边界层转捩(Hypersonic Boundary Layer Transition)飞行试验使用的模型进行了流动转捩预测分析,并指出该模型上的主导转捩的失稳类型应该是横流失稳。
2) LASTRAC软件
NASA的Chang[66]基于LST、PSE等开发了一套流动稳定性分析和转捩预测的LASTRAC软件,该软件是目前功能相对较全的转捩预测程序,除LST外,还支持线性PSE和非线性PSE,可用于二维和三维问题,同时新版本支持非正交坐标系。
Chang等[67]使用LASTRAC软件对HIFiRe-5模型进行了N值计算,得到了N值分布云图。结果表明,使用LASTRAC软件计算得到的N值分布云图与流动转捩实验中测得的温度分布图在定性上是类似的。进一步说明该软件在工程上得到了成功的应用。
3) PMNS3D软件
国内也开展了转捩预测eN方法的应用研究。PMNS3D是西北工业大学自主研发的采用耦合eN转捩预测方法的三维RANS方程求解器[68],可以对机翼边界层内由T-S波不稳定性和C-F波不稳定性导致的转捩进行预测。该求解器主要由3个模块构成:① 三维RANS方程求解模块; ② 三维层流边界层方程求解模块; ③ 基于线性稳定性理论的eN转捩预测模块。不同模块耦合流程如图22所示[68]。
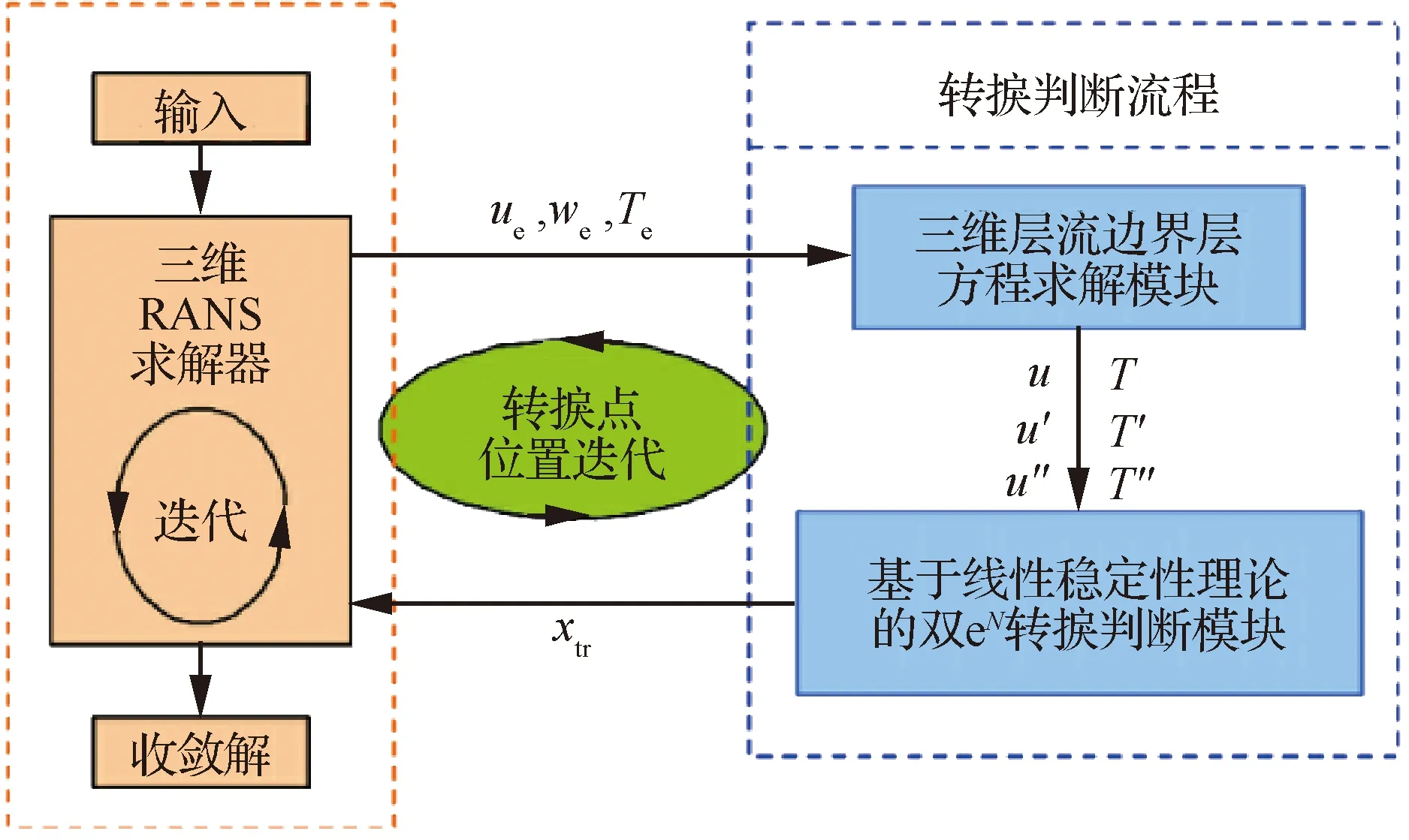
图22 RANS求解器耦合转捩预测模型的流程[68]
4) 天津大学的转捩预测软件
天津大学的黄章峰等[69-70]提出了高超声速边界层转捩预测软件的实现途径,其基本思路是结合流动稳定性分析和转捩工程应用方面的经验,建立特征值、感受性等一系列知识库,具体的软件流程图与知识库的关系如图23所示[70]。目前该软件已经完成了实用、智能的软件设计,编码实现了多块结构化网格外形流场的基本流处理、转捩位置评估等全自动操作,并在工程应用单位进行了初步应用。
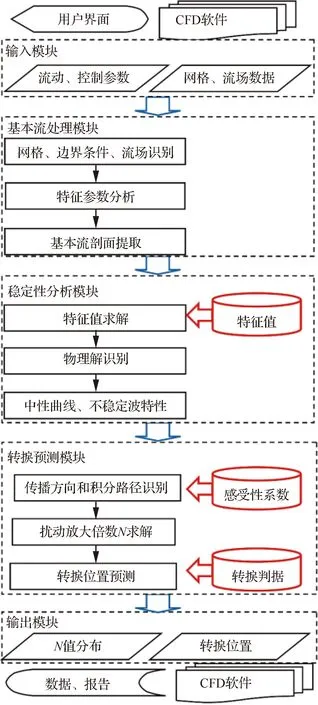
图23 软件流程图与知识库的关系[70]
除此之外,还有一些针对转捩预测的方法和软件,目前主要针对亚声速流动,在超声速流动中还未得到成熟应用,如法国宇航院(ONERA)的eN-Database转捩预测方法[71]、德国宇航中心(DLR)开发的LILO软件[72-73]、瑞典国防研究局(FOI)将eN-Database与求解器Edge耦合得到的转捩预测软件[74]、航空工业空气动力研究院(以下简称航空工业气动院)的非结构RANS求解器耦合eN-Database的转捩预测方法等[75],这里就不再作详细介绍。
3.1.2 间歇因子输运模型
基于RANS的转捩预测方法相比于采用DNS和LES方法预测转捩所需计算量小,更适用于转捩预测的工程应用,也是开展边界层转捩研究的重要模式。
近年来,基于RANS方法已发展了多种转捩预测模型[76],但相对于已知低速边界层转捩(由二维Tollmien-Schlichting不稳定波[77]主导),高马赫数边界层的转捩过程则是由高阶不稳定模态[27,78]主导,受多种因素影响且敏感性问题突出。基于RANS模式所建立的转捩模型若不能正确反映上述机制,则无法正确预测其转捩过程。另外,不同于物体几何特征简单的几何模型(如平板、锥型等),超声速飞机外形通常较为复杂,在真实飞行器的三维边界层中,存在明显的横流效应,成为三维边界层转捩的主导因素[79]。因此,迫切需要发展可正确描述高马赫数边界层转捩特有物理过程、适用于三维飞行器复杂外形边界层转捩预测、具备预测横向流动转捩能力的转捩模型。
间歇因子输运模型是一种工程转捩预测的数值方法。在转捩过程中,流动在同一空间位置会间歇性地呈现层流或湍流状态,称为间歇现象。间歇因子γ被定义为空间某点流态是湍流的概率。γ=0时为层流;γ=1时为湍流;γ从近似为0突然增长到1的位置被认为是转捩位置。对于简单外形,在经验关系式的基础上,采用间歇因子输运方程可以很好地预测转捩点与转捩区间。但由于经验关系式需要采用非局部变量,对于复杂外形飞行器绕流,这些非局部变量的获取将会带来较大的计算量,且往往要引入较大误差,发展基于当地变量的转捩预测模型逐渐成为共识[80-81]。
1) 基于当地变量的γ-Reθ t模型
为了建立基于当地变量的转捩预测模型,Langtry和Menter[80]首先提出了涡量雷诺数的概念,避免了求解边界层的厚度等非当地量,同时通过拟合不可压平板边界层转捩实验数据提出了一种基于当地变量的γ-Reθ t模型。该模型在k-ωSST湍流模型的基础上加入了两个额外的输运方程。其一是间歇因子γ输运方程,该方程通过控制边界层内湍动能生成项来触发和控制转捩过程;其二是关于转捩起始动量厚度雷诺数Reθ t的输运方程,用以保证所建立的模型方程中不含显式的非当地量。Langtry和Menter将上述两输运方程与k-ωSST湍流模型进行耦合,构造了一个四方程的转捩预测模型,实现了对低速转捩现象的模拟。
γ-Reθ t模型目前已经成功得到包括低速自然转捩、Bypass转捩和分离转捩等多种算例的验证。许多学者开始将该模型应用于高超声速边界层转捩模拟。Frauholz等[82]将γ-Reθ t模型引入Eisfeld的RSM湍流模型并应用于超燃冲压发动机的数值模拟中。Cheng等[83]对压力梯度和转捩长度关系式进行修正,对马赫数为8的尖锥进行了数值模拟,研究了来流湍流度和网格密度对转捩模拟结果的影响。Bensassi等[84]模拟了高超声速轴对称圆锥转捩流动,计算结果与实验符合较好。国内,张玉伦[85]和张毅锋[86]等对γ-Reθ t模型开展了高马赫数重新标定研究。尚庆[87]和刘周[88]等采用γ-Reθ t模型对高超声速尖锥及钝双楔开展了数值模拟研究。郑赟等[89]参考部分高超声速风洞的试验数据尝试对γ-Reθ t模型经验关联式进行改进。张晓东[90]、郝子辉[91]以及尤延诚[92]等对γ-Reθ t模型进行了高马赫数修正并应用于高马赫数边界层的转捩预测。
2) 基于当地变量构造的K-ω-γ模型
基于层流脉动能概念,Walters和Leylek[93]将湍动能分解,并通过引入层流与湍流中的相互作用,建立了一种基于当地变量的k-kL-ε三方程转捩模型[94]。该模型在低速平板、翼型实现了转捩的准确模拟,该模型并未引入间歇因子的概念,并且方程中各项的模化工作主要依赖数值试验,模型中参数过多。虽然k-kL-ε模型也建立在当地变量的基础上,易于集成到并行化CFD程序中,但其原始模型针对低速问题设计,未能考虑到超声速边界层转捩特有的多模态主导转捩的现象。为此,王亮和符松[95-96]在Menter等[80]的研究基础上,通过构造一种等效特征长度尺度并将其应用于总脉动动能及间歇因子输运方程的封闭模化中,针对高超声速边界层转捩预测提出了一种基于当地变量的K-ω-γ三方程模型;周玲和闫超等[97]对K-ω-γ转捩模式进行了改进,采用网格预处理技术,可以快速大规模并行获取具有非当地变量属性的边界层参数,同时考虑了横流转捩,具有推广至工程复杂外形应用的潜力。
K-ω-γ模型以k-ωSST湍流模型为基础,基于当地变量构造的高超声速转捩预测模型,由总脉动动能K、比耗散率ω以及间歇因子γ的输运方程构成。该转捩模型的主要思想是通过求解层流脉动能kL和间歇因子γ的输运方程来模拟转捩过程。层流脉动能kL物理上代表转捩之前不稳定波的发展,其输运方程求解结果主要作用是用于预测转捩区的起始位置。层流脉动能输运方程的生成项反映不稳定波随流向幅值的放大引起kL增大的过程,从而使得实际中的不稳定波幅值达到临界点引起转捩时,kL也达到模型中转捩起始的要求。生成项中最重要的参数是反映第1、第2模态的不稳定扰动波发展的时间尺度模型。K-ω-γ模型中并未单独为层流脉动能kL构造输运方程,而是层流脉动能和湍动能共享一个输运方程,并通过引入有效涡黏性系数来完成转捩之前层流脉动能方程和湍动能方程之间的切换。K-ω-γ模型中另外一个输运方程是间歇因子γ的输运方程,其主要作用是在kL增大到一定程度并触发转捩之后模拟转捩的整个过程。该模型在近期也得到了不断的关注和发展。
3.2 风洞试验
风洞试验由于成本低、效率高、测量技术丰富、能够比较真实地反应转捩现象,是目前进行超声速边界层转捩研究和层流评估的主要手段。本小节重点对风洞试验的难点、转捩位置测量技术和相关影响因素进行介绍。
3.2.1 风洞试验的难点
在风洞试验中进行层流研究必须面对一个重要问题,就是试验段的扰动水平。扰动水平的高低对转捩过程有着不可忽视的影响。对于大型超声速风洞,上游整流装置、喷管边界层、气动噪声等都会给流场带来扰动。因此,风洞的扰动水平要远高于飞行环境。在1985—1987年间的Falcon50垂尾尾流自由飞实验中,测得马赫数为0.65 条件下相对压力脉动P′/Q<0.4%,湍流度Tu<0.025%,;而在S2MA风洞中,测得的P′/Q≈1.6%,Tu≈0.19%,分别比飞行测量的扰动水平高4和7.5倍[12]。为了获得真实的转捩现象和可靠的转捩数据,理论上超声速风洞的来流湍流度应小于0.05%,但受限于风洞马赫数范围和尺寸限制,一般都难以达到。图24[25]给出了NASA的SWT超声速风洞在马赫数2.0时10 psi(1 psi=6 894.757 Pa)总压下自由流质量流量的波动水平,其质量流量的波动在0.1%以下,已经是比较理想的测量设备了。
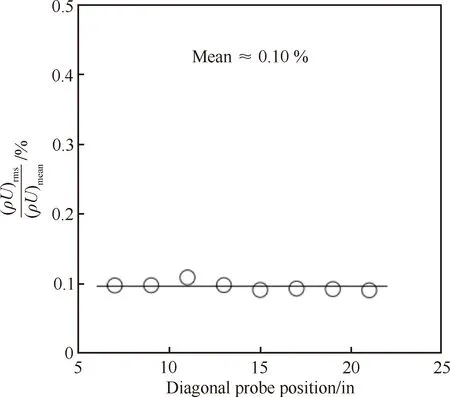
图24 马赫数2.0时热线探针自由流扰动水平的测量值[25]
图25给出了法国S2MA风洞超声速试验段的压力和速度波动水平。在0.5~1.5 bar(1 bar=105Pa)的总压范围内,马赫数1.5~2.5之间,压力和速度波动在0.1%~0.24%之间。采用Mack[98]提出的关于临界N因子和自由流湍流度Tu的关系式:
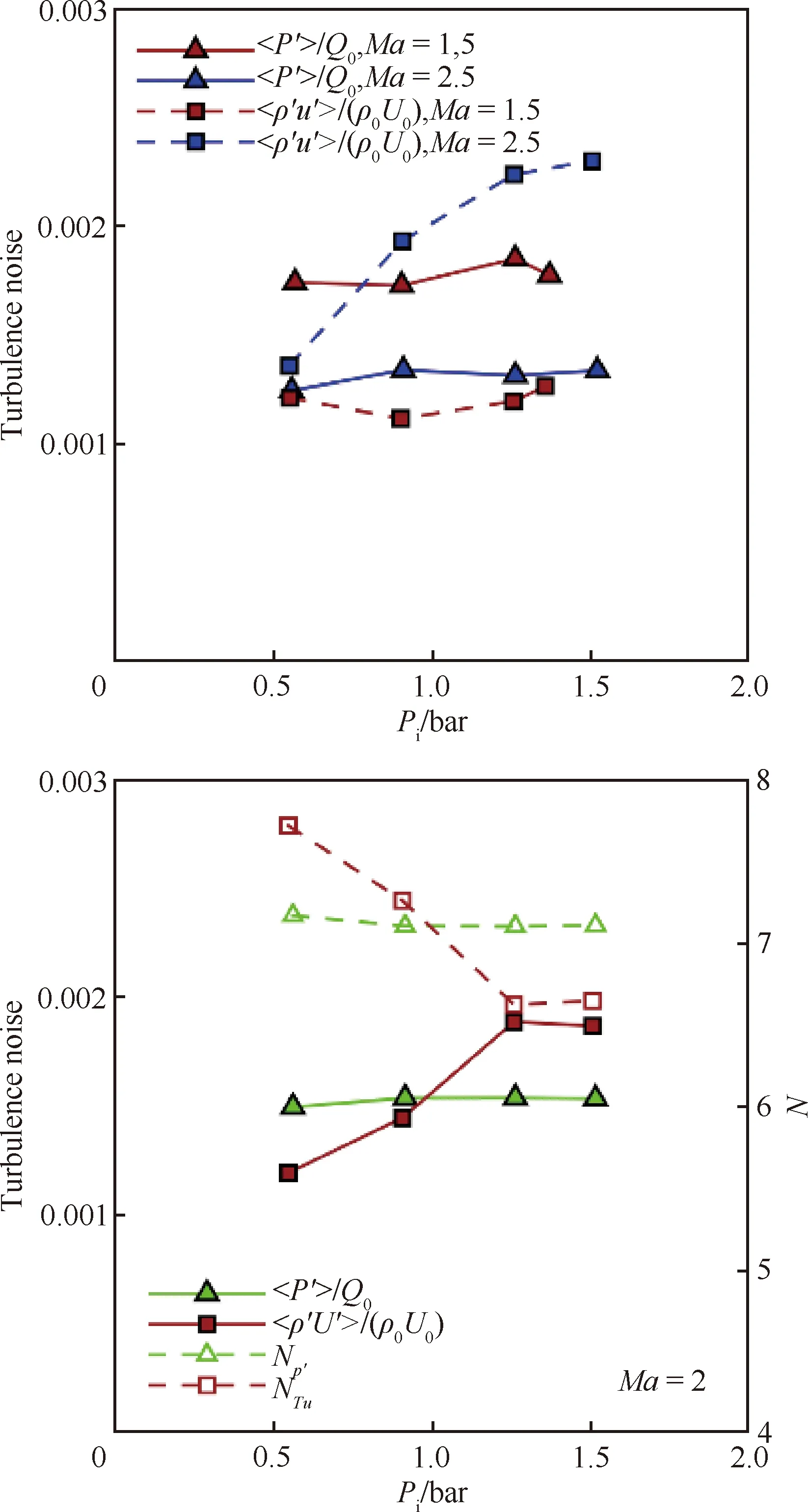
图25 S2MA试验段的自由流扰动和相应的N因子[12]
NT=-8.42-2.4×lnTu
(6)
计算得到的NT在6.5(0.5 bar)~8(1.5 bar)之间,在目前的超声速风洞中属于低噪声风洞。
航空工业空气动力研究院也开展了FL-1超声速风洞的背景扰动测量和分解研究。图26为扰动综合测量装置,包括了静压传感器、热线探针、皮托管。实验测量了马赫数2.0和3.0时的风洞来流静压脉动与激波后总压脉动,结果如表1所示。从声波扰动模态的幅值来看,该风洞背景噪声较大,属于典型的噪声风洞。后续将结合热线测量结果进行来流扰动模态的分解工作,以期获得更多的风洞背景扰动信息。
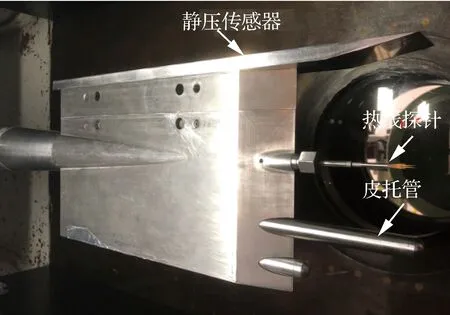
图26 风洞来流扰动综合测量装置
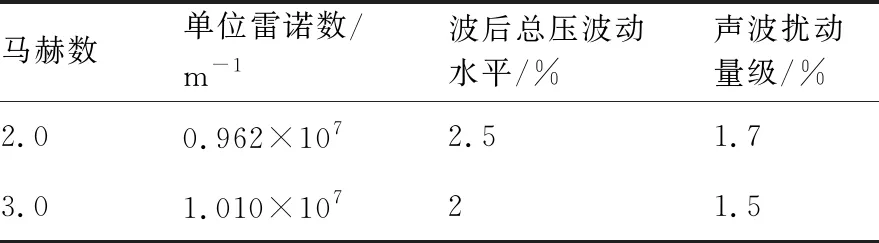
表1 FL-1超声速风洞来流扰动测量结果
从物理角度看,风洞试验虽不能复现飞行环境,从风洞试验中获得的转捩数据需进行一定的修正才能与飞行试验保持一致。但即便如此,在风洞中开展转捩试验依然是有意义的,其仍能给出合理的趋势,特别是便于测量并提供有关扰动放大和流动向湍流转变的重要信息。
3.2.2 转捩位置测量
对于超声速边界层转捩探测,常用的手段有:动态压力传感器、热流传感器、热线风速仪、红外热像技术、温敏漆技术和升华法等。
动态压力传感器、热流传感器、热线风速仪都是根据所测物理量在层流和湍流区域波动水平的差异来确定转捩位置。这种方法通常需要迎角或者雷诺数的连续变化来判断测点是位于层流区还是湍流区。因此,通过这种方法只能得到大致的转捩位置。JAXA在NEXST-1的风洞试验中就使用了这种方法,如图27所示[99]。随着迎角由负变正逐渐增大,压力波动的均方根值先保持不变后陡然增大,接着迅速下降。据此可以判断,该点在尖峰对应的迎角附近发生转捩。
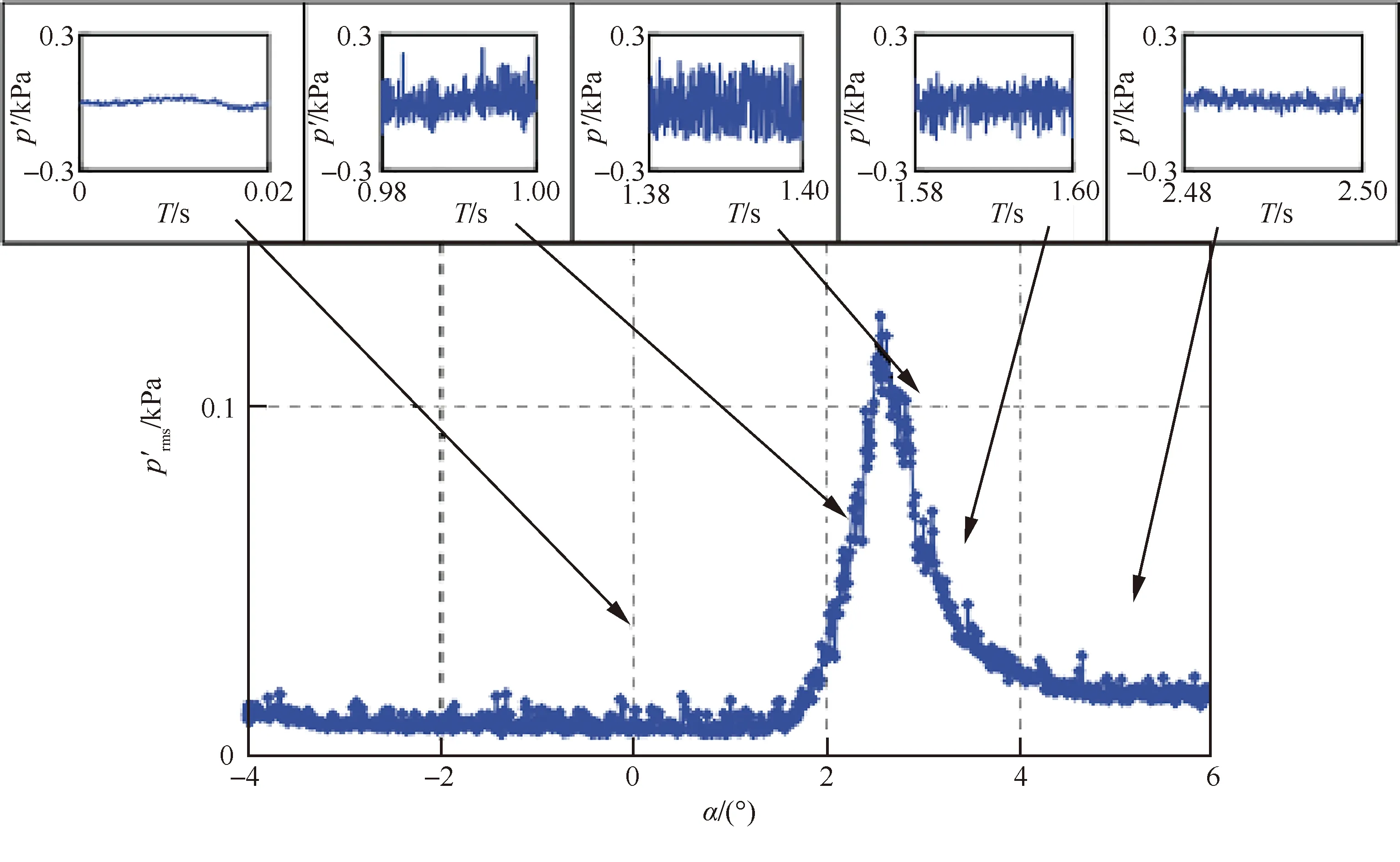
图27 动态压力交流输出随迎角的变化[99]
红外热像技术和温敏漆技术都是通过测量模型表面的温度,然后根据层流区和湍流区因换热效率不同产生的温差来确定转捩位置。红外技术的优势在于其较高的温度分辨率(约为0.02 K[100]),而TSP技术的温度分辨率大约是0.1 K[101]。但在超声速风洞中,由于来流静温比较低,模型表面温度会下降地非常快,因此如何维持来流与模型表面的温度差就成为这两种技术在超声速风洞中应用的关键。目前一种有效的方法是使用电阻加热涂层给模型表面均匀加热[102]。通过在模型表面喷涂一层低厚度的电阻加热涂层,然后通电加热,实现模型与风洞气流之间人为制造的可自由调控的温差。王猛等[103]将该方法应用到超声速流场的红外热像转捩探测中,成功地捕捉了后掠机翼的横流转捩现象,如图28所示,流动从左往右,给出了典型后掠机翼马赫数1.5条件下的转捩图像。
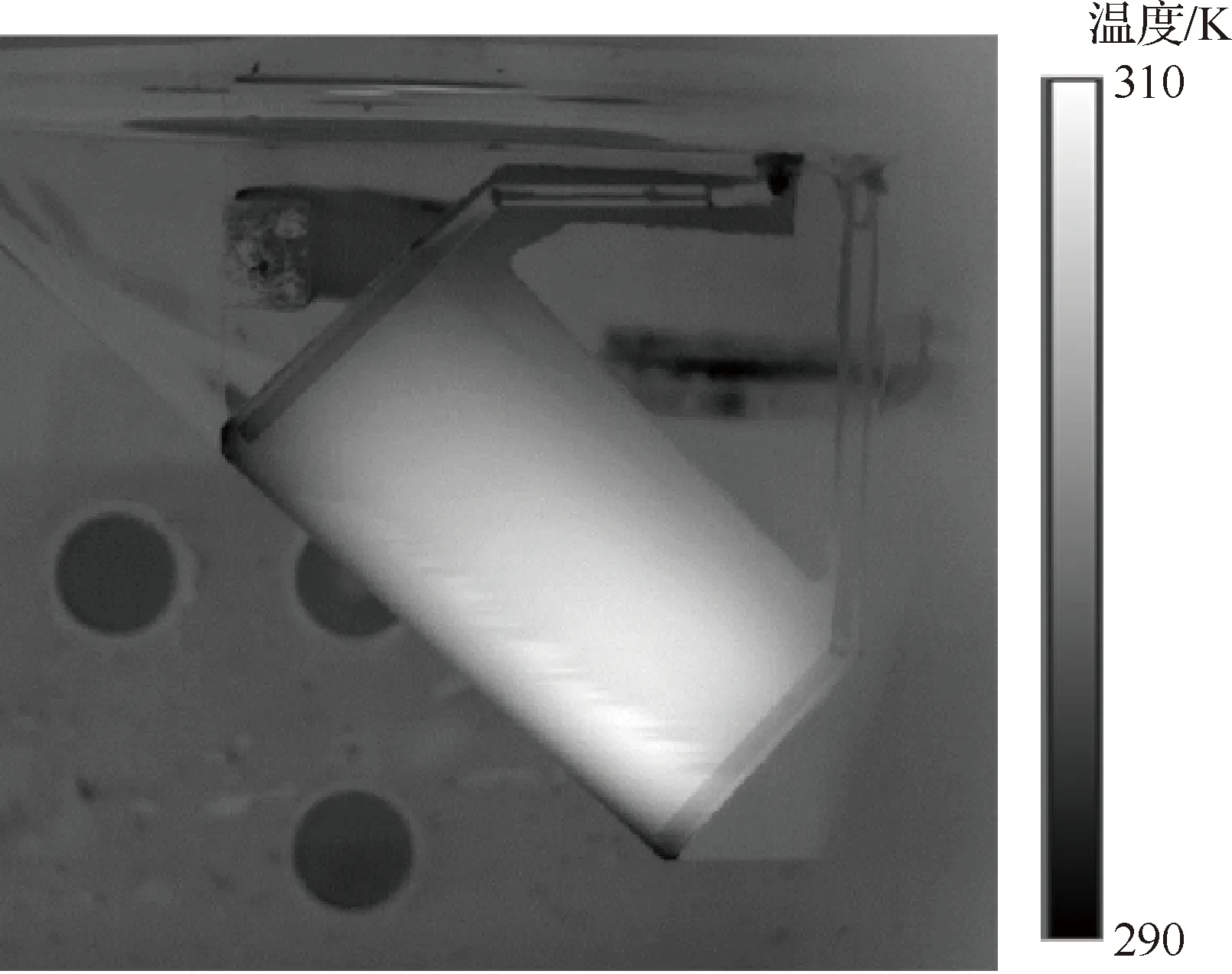
图28 马赫数1.5时的转捩测量[103]
升华法则是利用化学升华物质在层流区和湍流区升华速率的不同,当湍流区涂层消失后层流区涂层仍然存在,从而确定转捩位置。在低速和亚声速领域,升华法已经被广泛地应用[104]。但在超声速流场中,存在着升华速率过快,涂层易被吹掉等困难。因此,必须寻找新化学升华品、溶剂以及配比。NASA的Owens等[25]使用芴(C13H10)作为升华物,Vertrel SDG(一种航空发动机脱脂剂)作为溶剂,溶剂与升华物的比例选择为65∶1(体积比),在超声速风洞中取得了很好的效果,如图29所示。图中:psia中1 psi=6.895 kPa,a表示绝对压力。随着雷诺数的增大,后掠翼的层流范围明显减小。并且当雷诺数较大时,观察到了典型的锯齿状转捩前沿,如图29(c)、图29(d)所示,说明驻波主导了转捩。
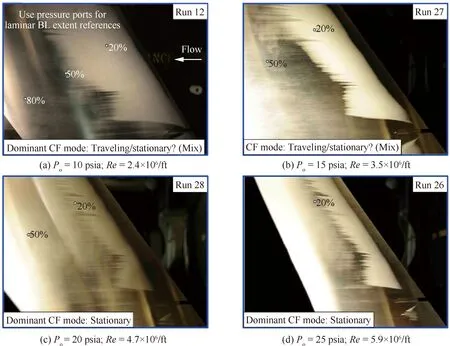
图29 马赫数2条件下不同雷诺数的转捩测量[25]
3.2.3 模型表面质量影响
层流保持效应高度依赖于模型表面质量。Radeztsky[105]、Saric[106-107]等的研究表明,横流不稳定性对表面粗糙度十分敏感,微米高度的粗糙元就足以增大横流驻波的扰动幅值,导致转捩提前发生。在处理边界层稳定性时,表面质量通常表示为基于粗糙度高度的雷诺数Rekk:
(7)
式中:k是粗糙度高度;Uz=k和νz=k分别为距离壁面z=k处未扰动边界层的平均速度和运动黏度。Archambaud等[108]通过ONERA的马赫数3.0风洞试验给出了临界N因子与Rekk的关系,即
NT=15.19-2.46×ln(Rekk)
(8)
图30为Archambaud等[108]的实验结果。从图中可以看出,对于尖前缘(LE)和钝前缘的后掠机翼,随着Rekk以对数标度增大,临界N因子呈线性减小,符合图中虚线(即关系式)所表示的函数关系。
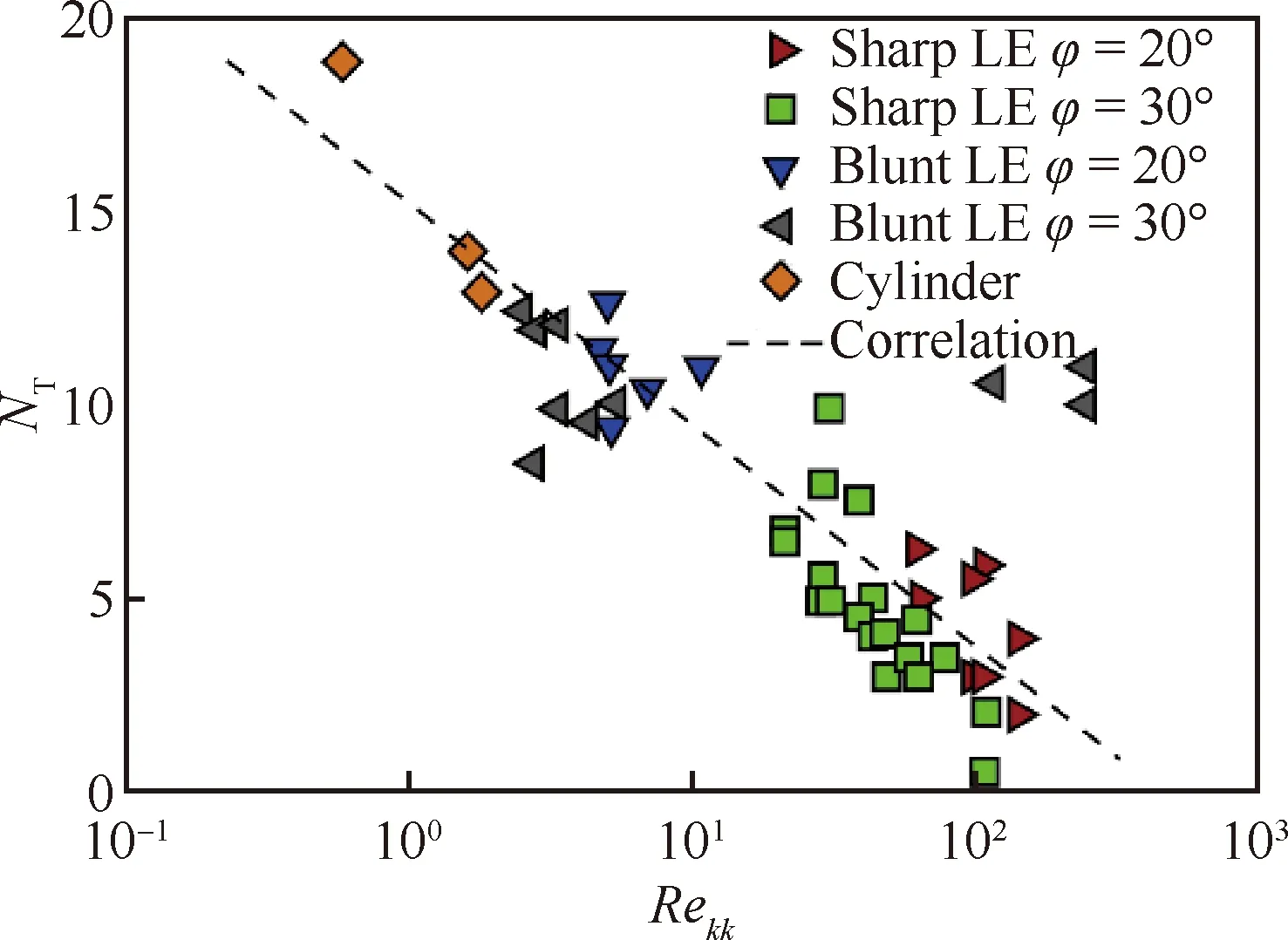
图30 粗糙度雷诺数Rekk与定常横流诱导的转捩N因子的函数关系[108]
Mack公式建立了临界N因子与湍流度水平的关系式。式(8)与之类似,主要反映的是表面粗糙度对横流驻波不稳定性的影响。
此外,实际模型还可能出现缝隙、台阶、螺钉等表面缺陷。在高雷诺数下,物体的边界层会很薄。这些表面缺陷的存在会给这些薄的边界层带来很大的扰动,不利于层流的保持。因此,为了确保层流性,风洞模型或飞行试验模型必须进行精心的打磨与抛光,以减少表面质量对转捩现象的影响。
3.2.4 雷诺数影响
超声速风洞受尺寸限制,实验雷诺数通常比飞行雷诺数小一个数量级以上。国外最大的超声速风洞为美国阿诺德工程发展中心(AEDC)的16S,试验段尺寸为4.88 m×4.88 m;国内最大的超声速风洞为航空工业气动院的FL-62风洞,试验段尺寸为2.4 m×2.4 m。然而这些风洞都不足以模拟真实尺寸飞机的高雷诺数。因此,在风洞中进行转捩实验,需要考虑雷诺数影响。
JAXA根据NEXST-1飞行试验的转捩数据,总结了雷诺数对大后掠NLF机翼转捩位置影响,如图31所示[109]。当雷诺数较低时,前缘附近C-F波引起的N因子放大被抑制,T-S波引起的N因子放大占主导,因此转捩位置在机翼后部缓慢向前移动(模式Ⅰ)。然而,随着雷诺数的增加,C-F波引起的N因子也随之增加。当超过某一雷诺数阈值,转捩迅速变成C-F波主导,因此转捩位置急剧移动到前缘附近的区域(模式Ⅱ)。之后,随着雷诺数的进一步增大,转捩位置不断向前移动(模式Ⅲ)。
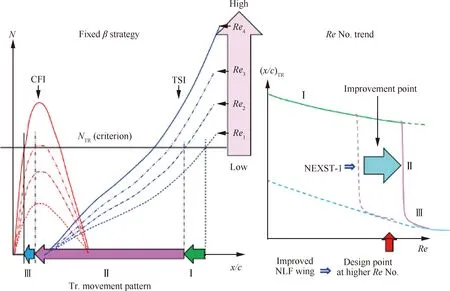
图31 雷诺数对大后掠NLF机翼转捩的影响[109]
3.3 飞行试验
飞行试验能够在真实飞行环境下进行转捩研究和层流评估,尽管其成本高、风险大,但仍然是不可或缺的研究手段。本小节将简单介绍飞行试验相对于风洞试验的优势和自身技术难点。
3.3.1 飞行试验技术的优势
1) 复现高空低扰动环境
3.2节介绍,超声速边界层转捩对外界扰动非常敏感,风洞中较大的来流扰动会使得转捩提前发生。尽管国内外相继建设了静音风洞,但喷管口径都较小,试验雷诺数远低于真实飞行雷诺数,不足以模拟真实的转捩现象。而飞行试验能够完全复现高空低扰动环境,得到真实的转捩结果。
2) 高雷诺数条件模拟
超声速风洞尺寸有限,通常都是采用缩比模型进行试验,因此试验雷诺数要远小于真实尺寸飞机的雷诺数。而飞行试验能够使用大尺寸甚至全尺寸模型,模拟真实飞机的高雷诺数条件。
3.3.2 飞行试验技术的难点
1) 精细化测量困难
与风洞试验相比,飞行试验测量技术较少,测量数据有限,且精度偏低。对于超声速转捩研究,飞行试验通常只能测量转捩位置,很难获取边界层的扰动信息,不足以支撑转捩机理等方面的研究。
2) 重复性较差
由于飞行试验牵涉面广,并且受大气条件影响,一般很难重复相同的飞行条件,因此数据重复性不高。美国航天飞机的数据表明,即使同一架飞行器在相同弹道多次飞行,转捩雷诺数也会出现比较大的变化[110]。
3.3.3 天地一致性问题
飞行试验是对设计及预测评估方法的综合检验,如上所述的飞行试验优缺点会造成风洞与飞行试验之间的空气动力学性能差异、环境差异以及几何模拟上的差异。风洞试验结果以及评估方法不能直接与飞行结果对比,需要经过多种修正。正确的利用飞行数据评价设计与预测手段是飞行试验技术关键。
在超声速转捩试验领域,由于目前数据积累并不像亚声速那样丰富,特别是针对机翼这样的复杂构型,数据积累就更少,故而有关试验数据的天地一致性问题并未有明确的结论,还需进一步的研究和探讨。
4 典型超声速层流布局设计与评估案例
4.1 NASA设计案例
NASA开展了自然层流机翼(NLF)设计的研究,最开始是将该技术应用于商用跨声速运输机的层流布局设计中[111],之后又将其成功扩展到超声速构型[112]。该NLF分析和设计方法包括一个流动求解器、网格操作工具、一个设计模块和转捩预测软件,如图32所示[112]。
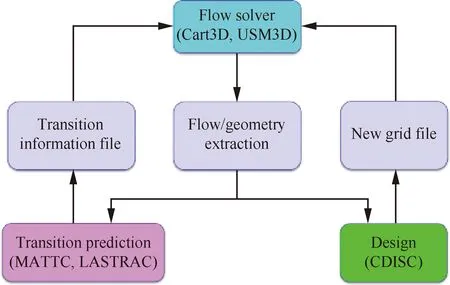
图32 NLF分析和设计框架流程图[112]
在超声速层流布局设计中,其将目标压力分布分为4个区域,如图33所示[112]。流动从前缘至x1处快速加速,随后经历零压力梯度的短区域至x2,这是在大后掠角和高雷诺数的机翼上抑制CF波增长的关键特征。x2和x3之间的压力梯度通过CDISC中一个通用阻尼函数(UDF)来确定,用于控制T-S波的增长。x3代表了所需的层流范围。
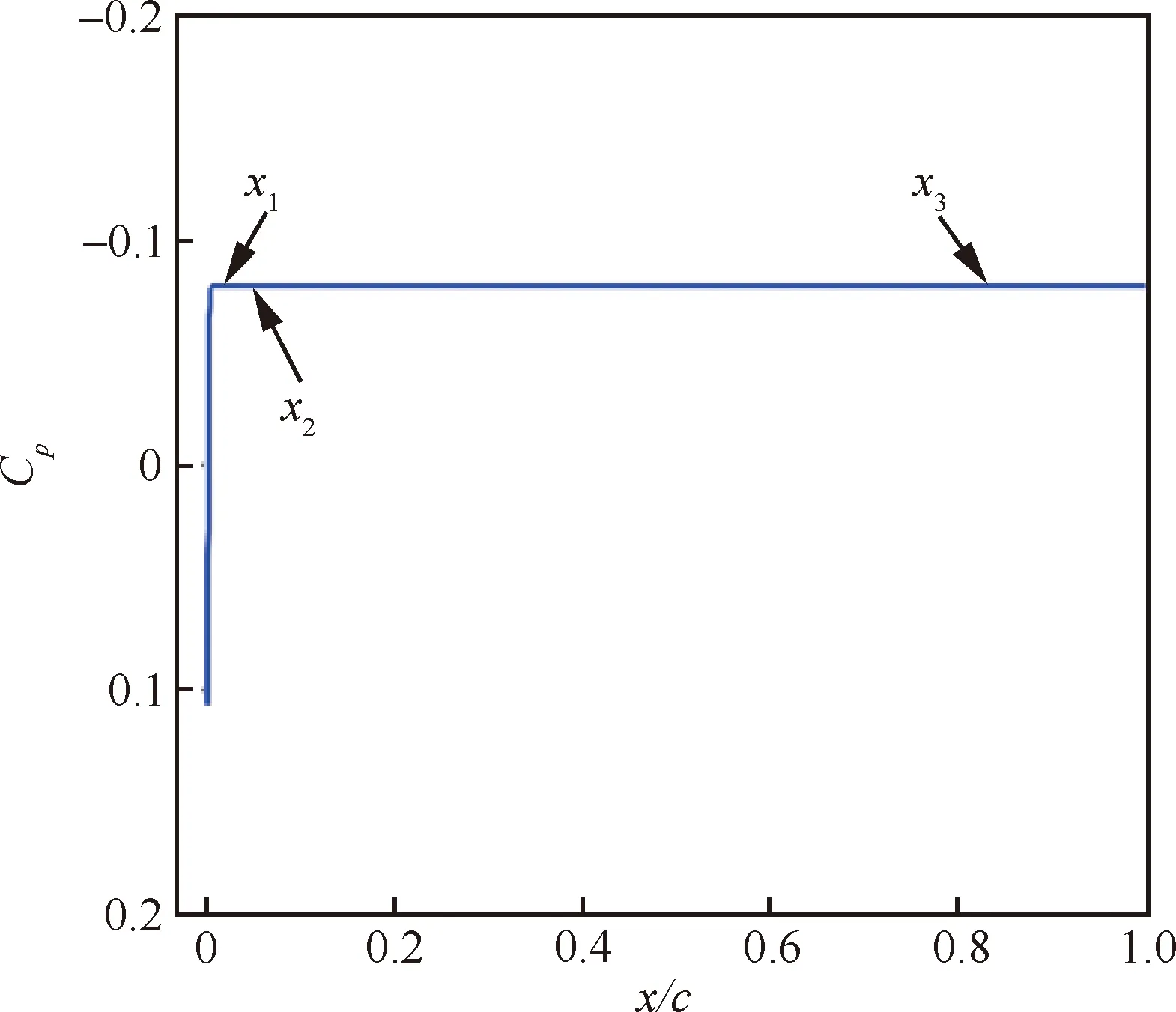
图33 显示x1、x2、x3相对位置的NLF目标上表面的Cp分布[112]
NASA利用上述方法,对超声速运输机构型(NJWB构型,如图34所示[112])进行了NLF设计与评估。设计点的巡航马赫数为1.6,迎角为3°,升力系数为0.1,单位雷诺数为190×104/ft。选取站位3和站位8(黄色线)用于展示设计优化后的结果。图35、图36分别显示了站位3和站位8的压力分布和翼型几何形状。从图中可以看出,目标压力与设计压力几乎相同。
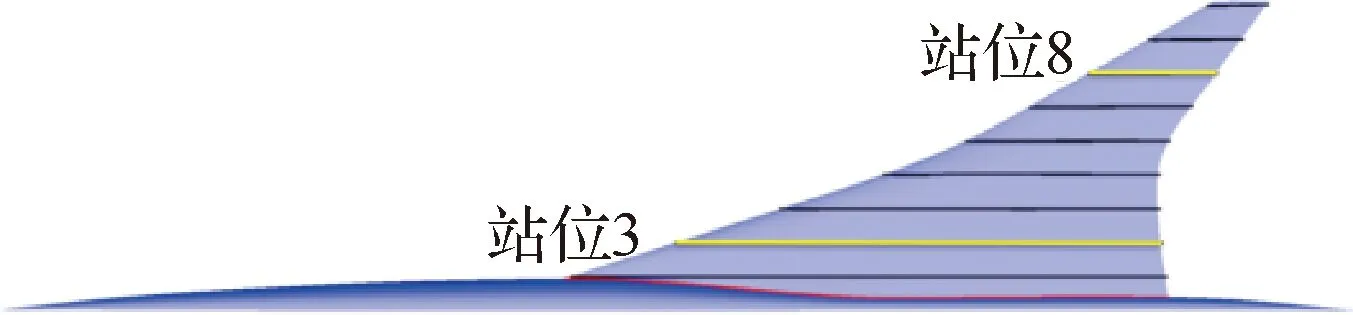
图34 NJWB构型的设计站位[112]
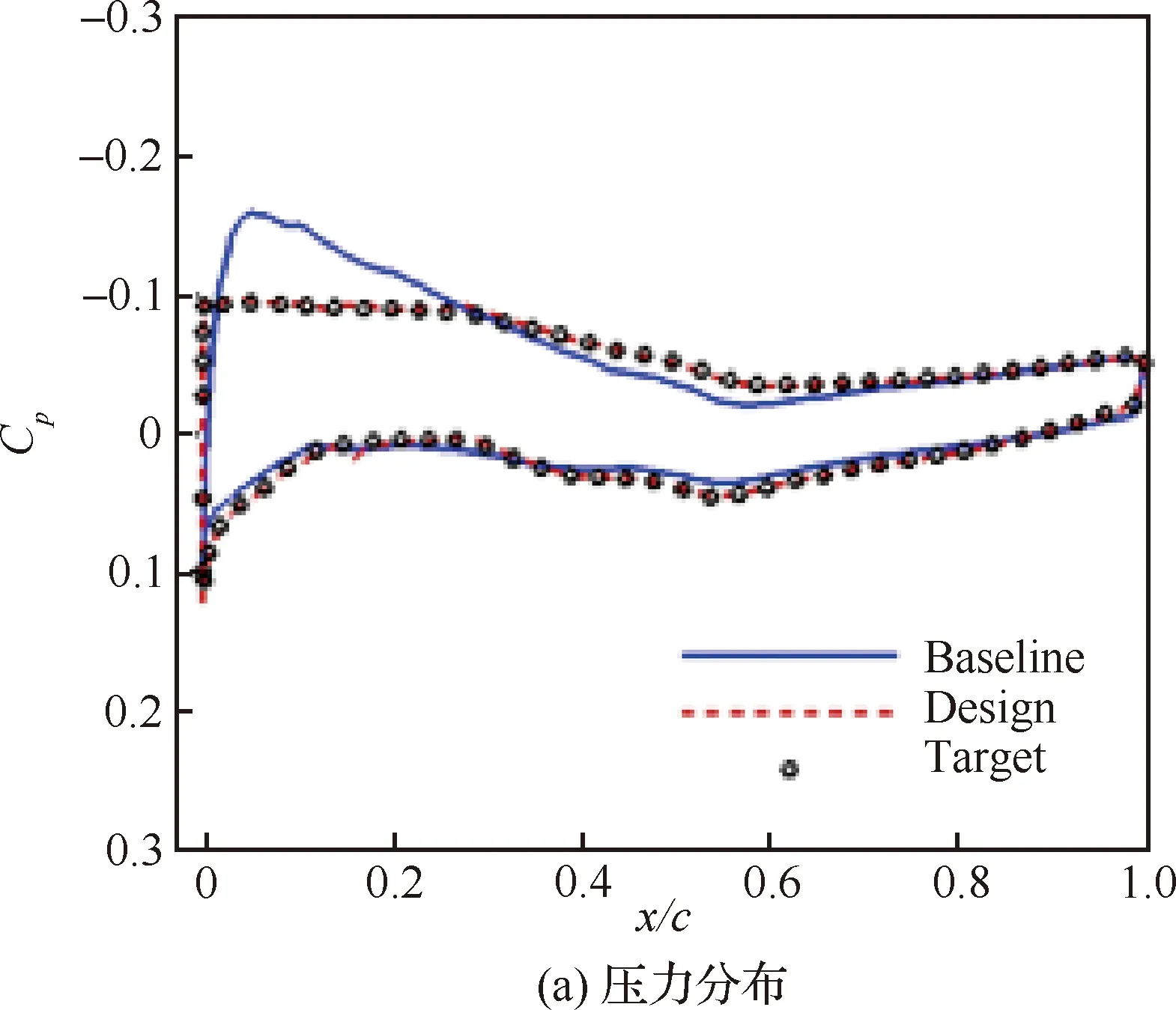
图35 站位3的结果[112]
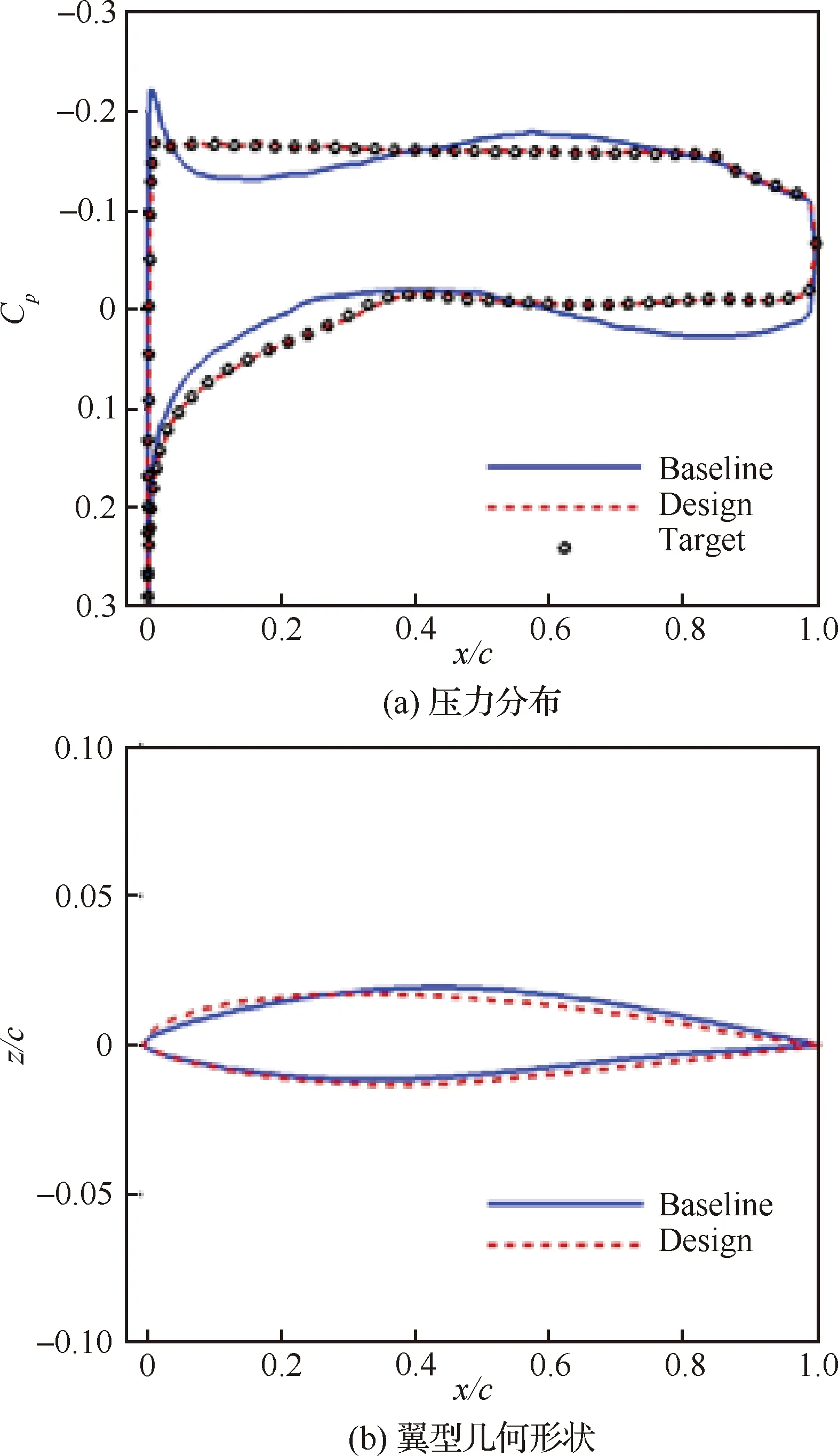
图36 站位8的结果[112]
NASA采用eN方法评估了多个展向站位的转捩位置,在各站位之间进行插值,计算得到图37 所示的转捩线,其中层流面积约占机翼上表面面积的44%。NASA还给出了非设计点下的转捩特性,如图38所示,在巡航条件附近,当迎角减小时(升力系数为0.09),层流区面积减小为19%;当迎角增大时(升力系数为0.11),层流区面积减小为31%。
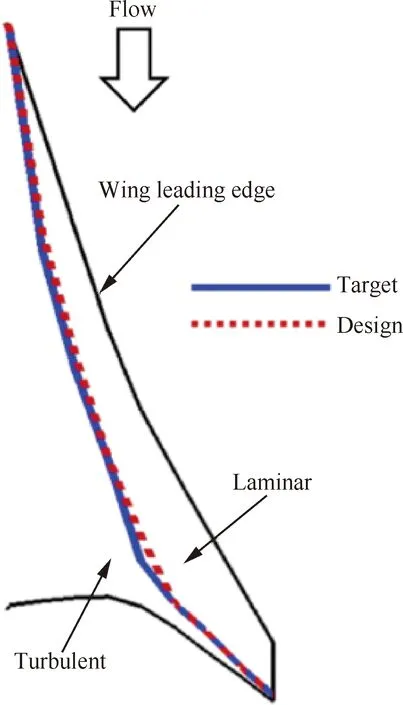
图37 机翼表面的目标转捩前沿和设计转捩前沿[112]
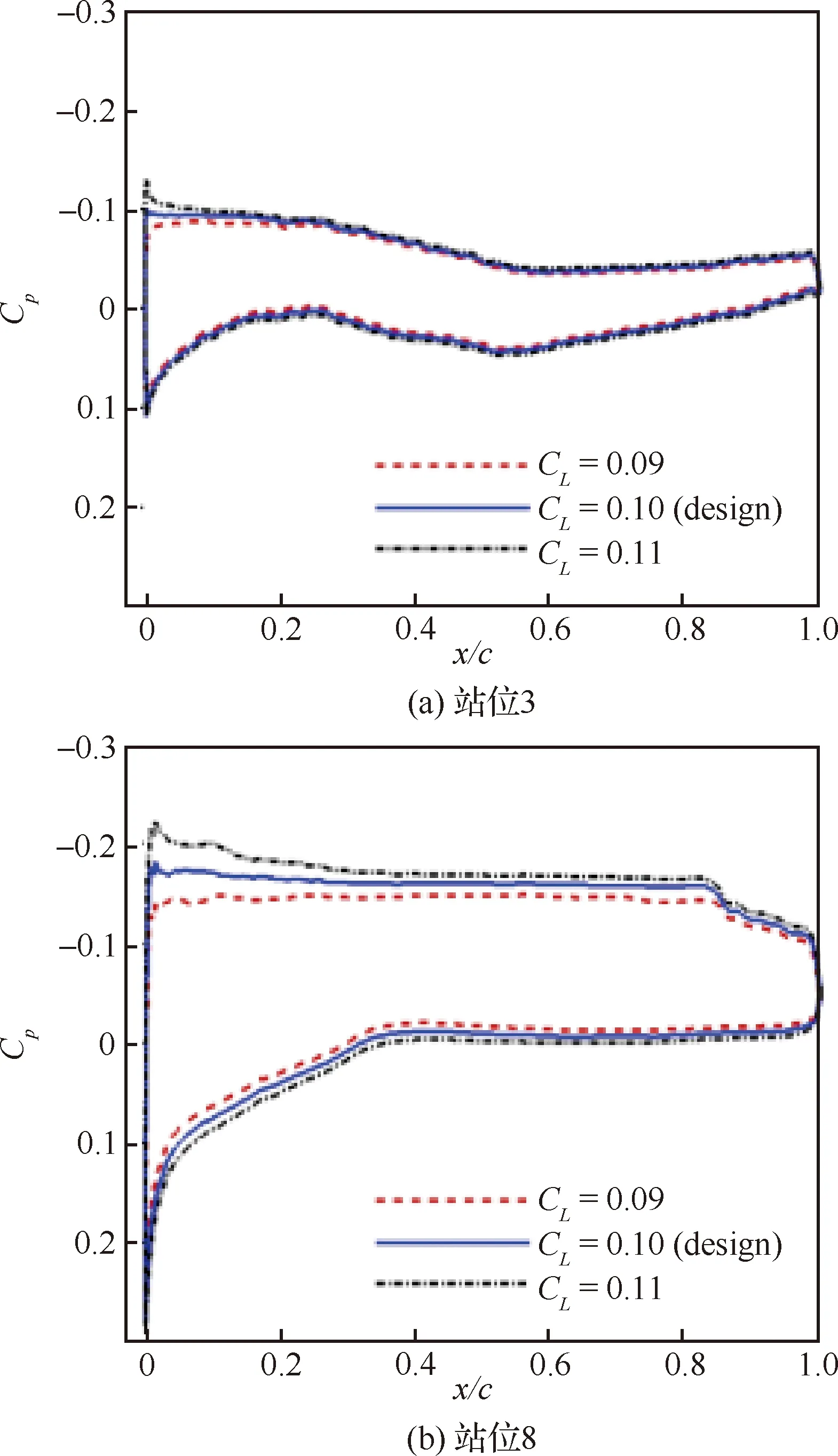
图38 站位3和站位8接近巡航状态下的压力分布[112]
4.2 JAXA设计案例
JAXA(日本宇宙航空研究院)一直致力于下一代超声速民机的设计与研发技术探索。在NEXST计划中[5],JAXA设计了名为“NEXST-1”的无动力试验飞机,用以验证JAXA的超声速创新减阻概念。
JAXA将NEXST-1飞机的气动设计分为两个阶段。在第1阶段,为了降低压阻,采用了基于超声速线性理论的箭头平面形状、翘曲机翼、面积律机体的设计方案;在第2阶段,开发了具有亚声速前缘的自然层流机翼(NLF)设计概念,以扩大机翼表面的层流范围。NEXST-1飞机的气动设计概念和构型如图39所示[113]。
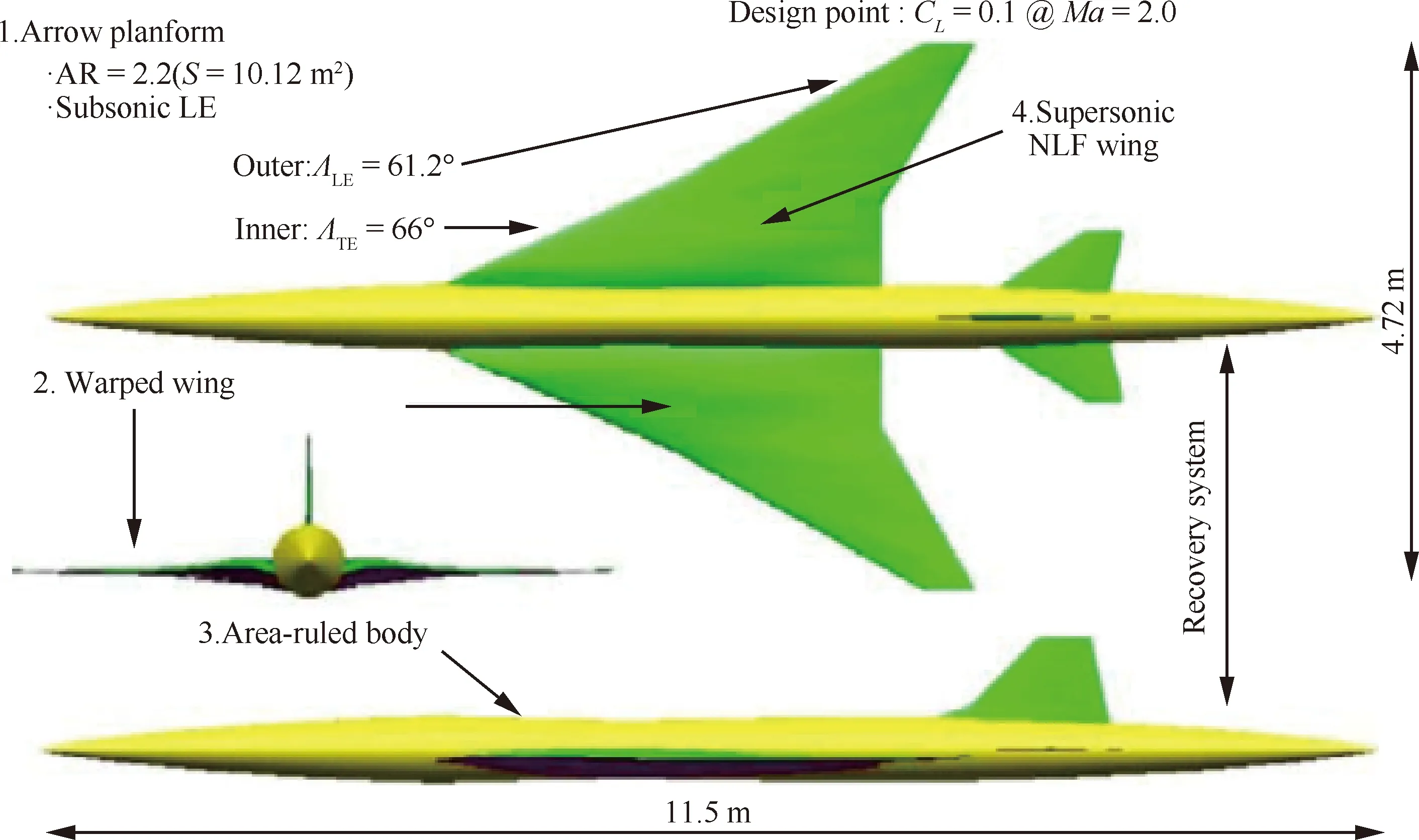
图39 NEXST-1飞机的气动设计概念和构型[113]
在NLF设计中,JAXA开发了基于计算流体力学(CFD)的反设计方法,如图40所示。这种方法在每次迭代时可以计算整个构型(机翼-机身-尾翼)周围的流场,并对机翼进行单独修改。迭代过程由以下步骤组成:① 使用CFD解算器来计算机翼表面的压力分布;② 计算压力分布和目标压力分布之间的压力差;③ 使用反设计方法导出所需的几何形状;④ 对展向站位的机翼剖面几何形状进行修正;⑤ 采用“CATIA”软件对包含原始机身和机翼的构型进行处理。图41[113]显示了最终迭代计算的压力分布与目标压力分布的比较结果,一致性很好。
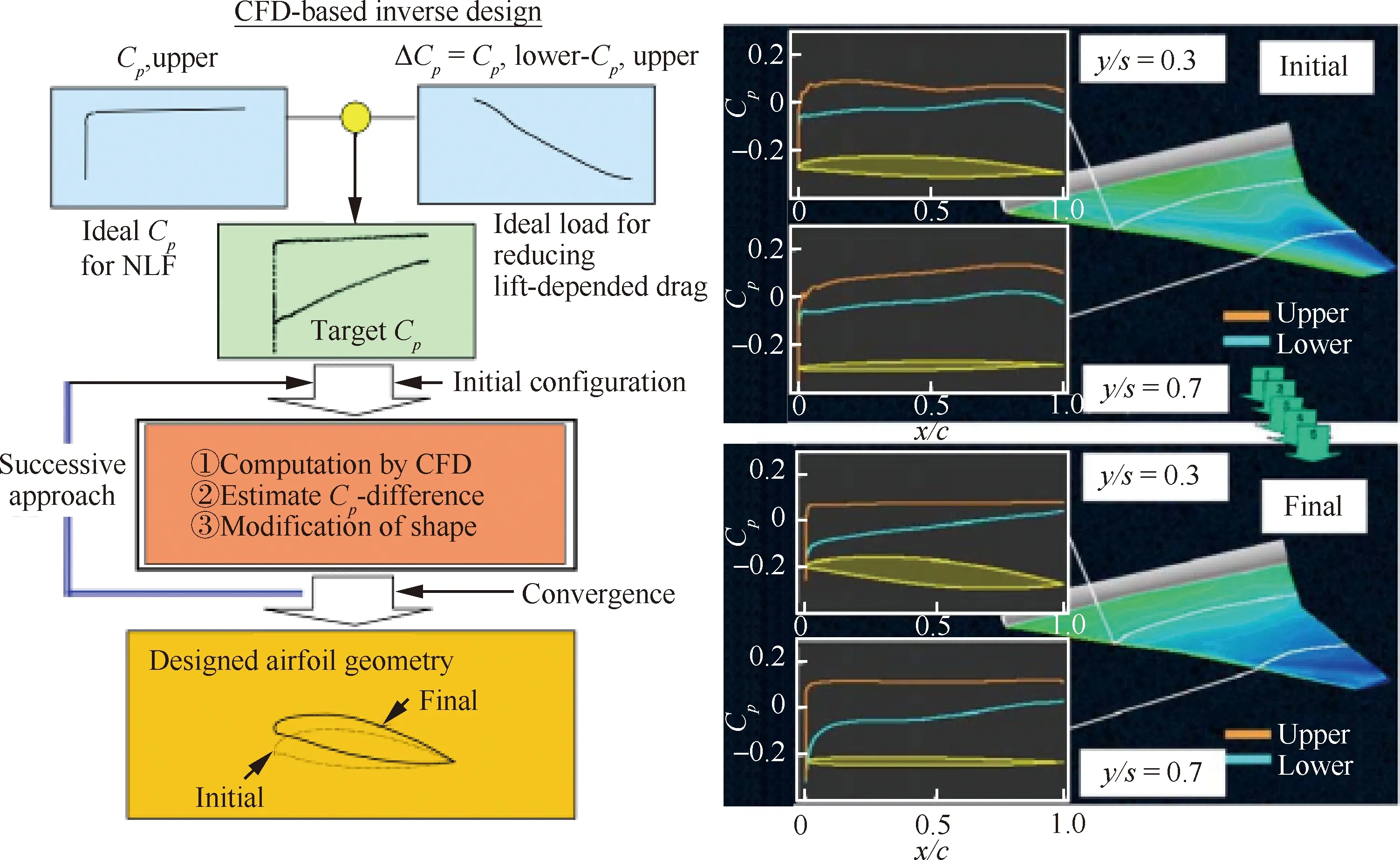
图40 基于CFD的反设计方法的设计流程[113]
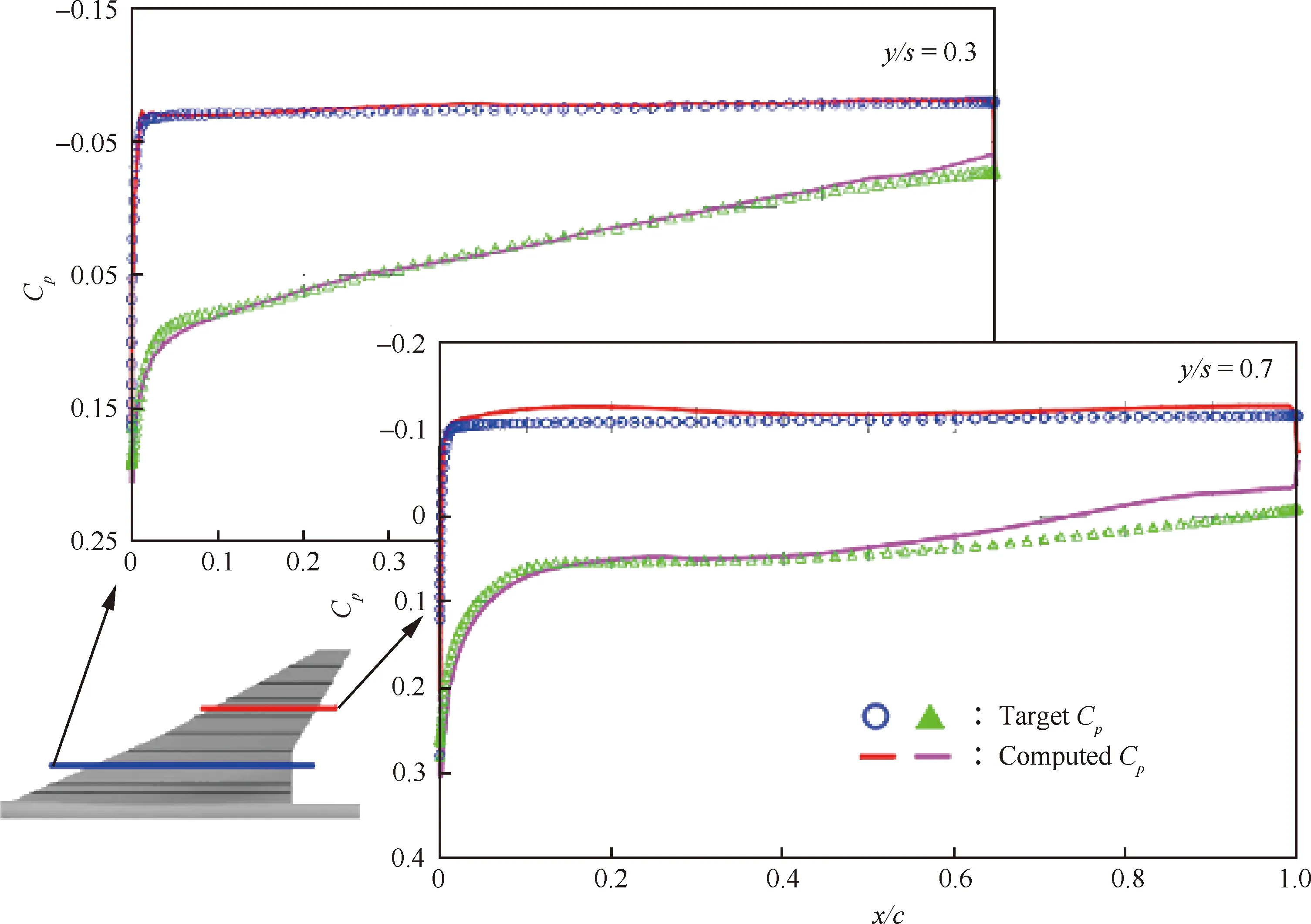
图41 反设计方法得到的Cp分布的最终结果[113]
为了验证NLF机翼设计概念的效果,JAXA进行了风洞试验和飞行试验。图42[113]将CFD分析结果与两个风洞测得的结果进行了比较,可以看出对比结果吻合的较好。通过红外成像技术检测转捩位置,结果定性地证实了在设计点下转捩位置向后移动,如图43所示[113]。
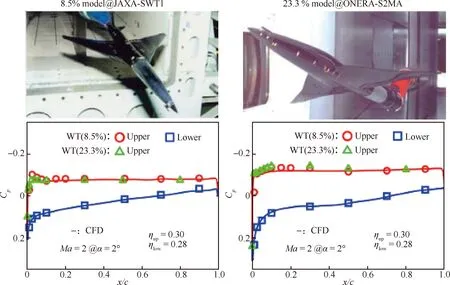
图42 压力分布的实验验证[113]
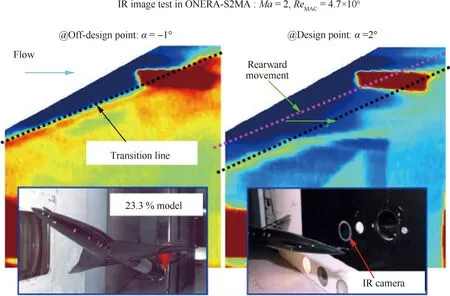
图43 转捩特性的实验验证[113]
图44[113]为飞行试验结果与CFD分析结果的机翼压力分布对比图,可以看出在上表面压力分布吻合的很好,在下表面试验与计算结果有略微的差异。但在总体上对比结果的一致性较好,说明NLF机翼的设计满足了飞行试验的条件。图45显示了飞行试验转捩位置的测量结果,可以看出在设计工况下(CL=0.1)的转捩位置是向后移动最大的,层流区域面积也是最大的,进一步表明飞行试验结果验证了NLF机翼设计理念的有效性。
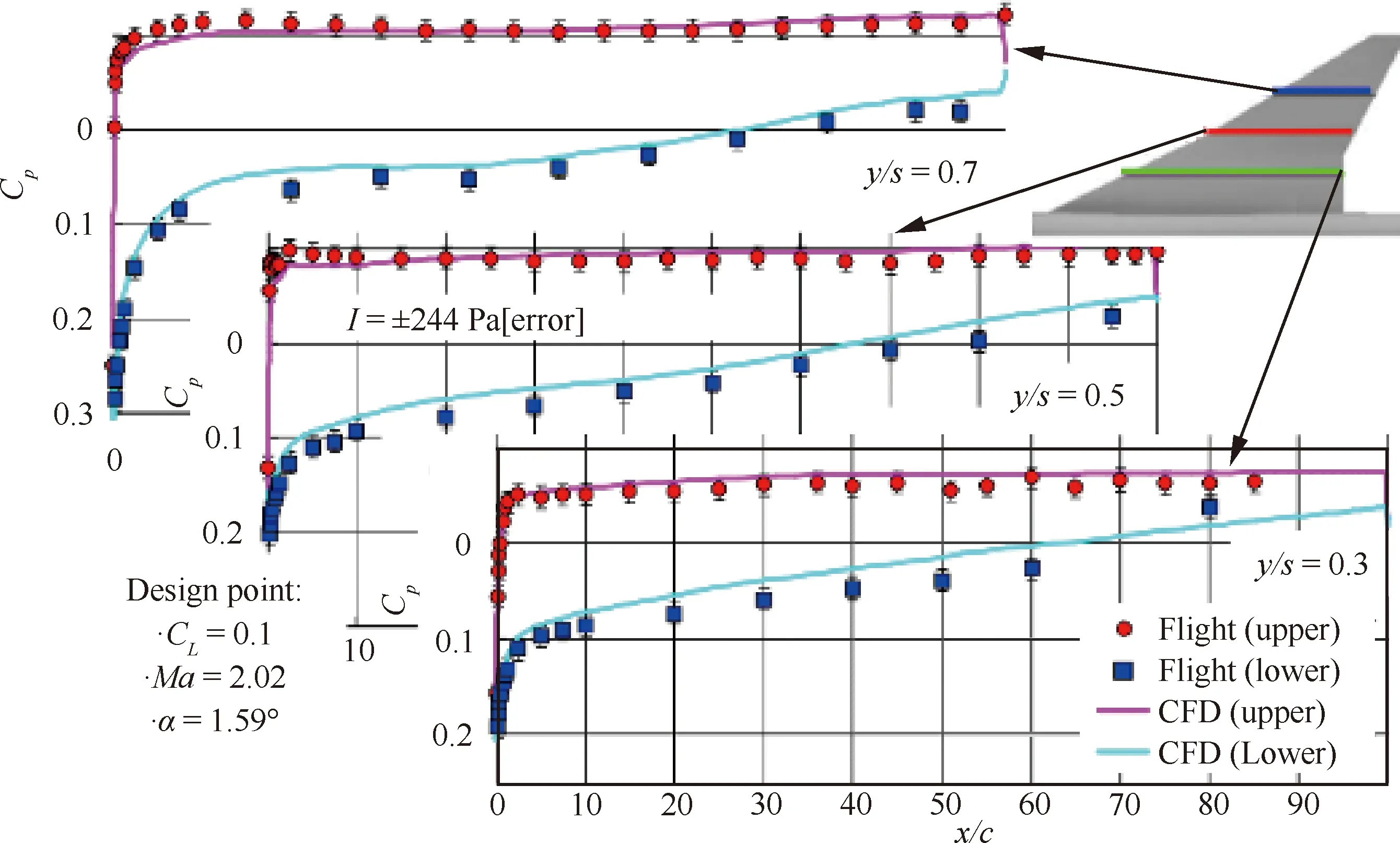
图44 飞行试验结果:机翼压力分布[113]
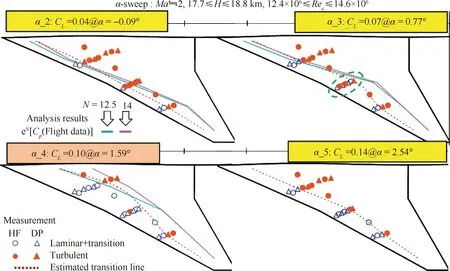
图45 飞行试验结果:转捩位置测量[113]
尽管NLF机翼设计在缩比的飞机模型上得到验证,但当雷诺数进一步增大时,层流效应显著减小,因此前期发展的设计方法在全尺寸飞机的高雷诺数下并不完全有效。为了改善这种情况,应该把主要工作放在抑制前缘附近的横流不稳定性上,因为随着雷诺数的增加,由横流引起的不稳定性变得更强。
抑制横流不稳定性的主要手段是缩短横流区域或减小横流强度。从设计具有有限前缘半径的真实机翼的角度来看,极其短的加速区域是难以实现的,甚至是不可能的,所以减小横流强度是另一种可能的选择。JAXA通过对NEXST-1机翼边界层的计算发现,反转横流速度的方向能够降低横流速度的绝对值,从而减小横流强度,抑制由横流不稳定性引起的N因子的放大[114]。
基于反转横流速度方向的设计思想,JAXA[109]提出了一个新的理想压力分布,如图46所示。首先,靠近前缘的加速区必须尽可能地短;然后,在陡峭的加速区后形成相对长一些的陡峭的减速区;最后,在减速区后形成一个缓慢加速的区域直至后缘。该压力分布可由一个函数表达式来描述,图中A0为前缘的Cp,A1为吸力峰的Cp,A2为减速区的最小Cp,A3为前缘附近典型弦向位置(比如x/c=0.05)的Cp,A4为A3位置到后缘Cp的梯度,B1为前缘加速区的加速梯度,B2急剧加速后的减速梯度,B3为减速之后的再加速梯度,P1是调整B3再加速起点的参数,P2是确定B3之后的Cp梯度。
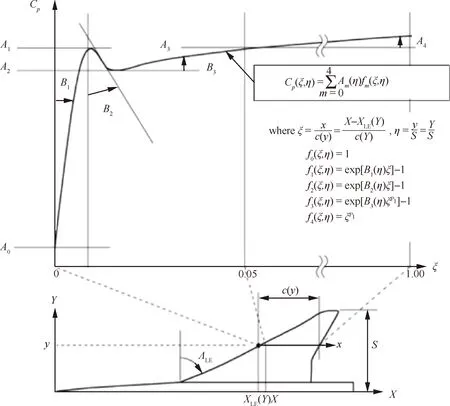
图46 高雷诺数条件下NLF机翼设计新的理想压力分布的函数表达式[109]
JAXA通过分析调整确定了新的理想压力分布的最佳系数组合,如表2[109]和图47[109]所示。图48[109]给出了横流速度在前缘附近从负侧(内翼方向)向正侧(外翼方向)的变化,横流速度的绝对值在x/c≤0.3之前被限制在较小的值,之后才变大。图49[109]给出了N=12.5,14两个转捩标准下预估的转捩位置。相较于先前的NEXST-1,在高雷诺数下有显著的改进。
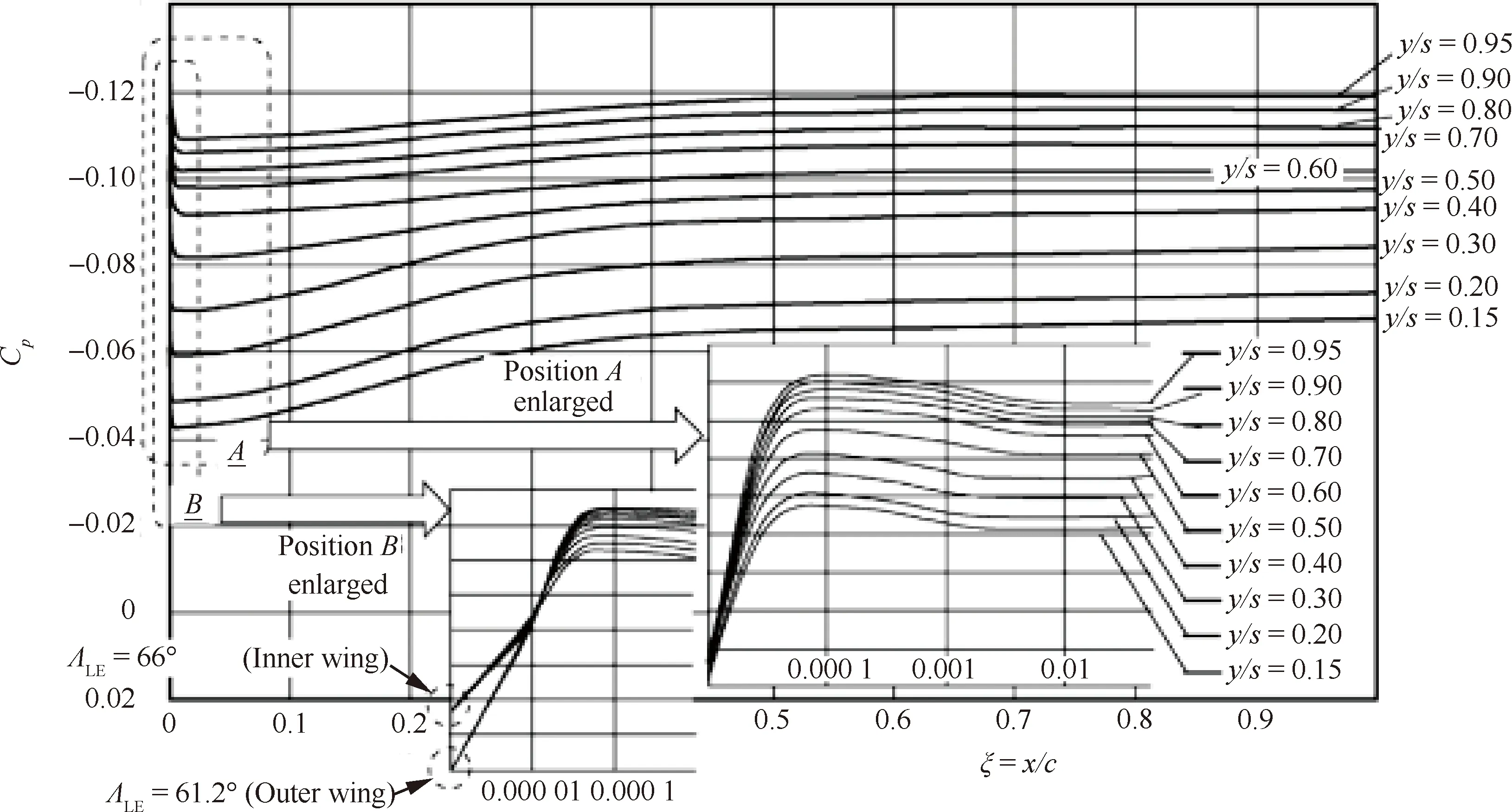
图47 高雷诺数条件下NLF机翼设计的新理想压力分布[109]
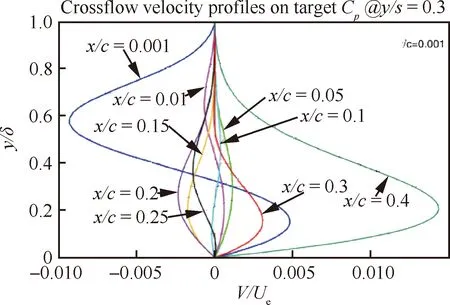
图48 高雷诺数下根据新的理想压力分布计算的横流速度剖面[109]
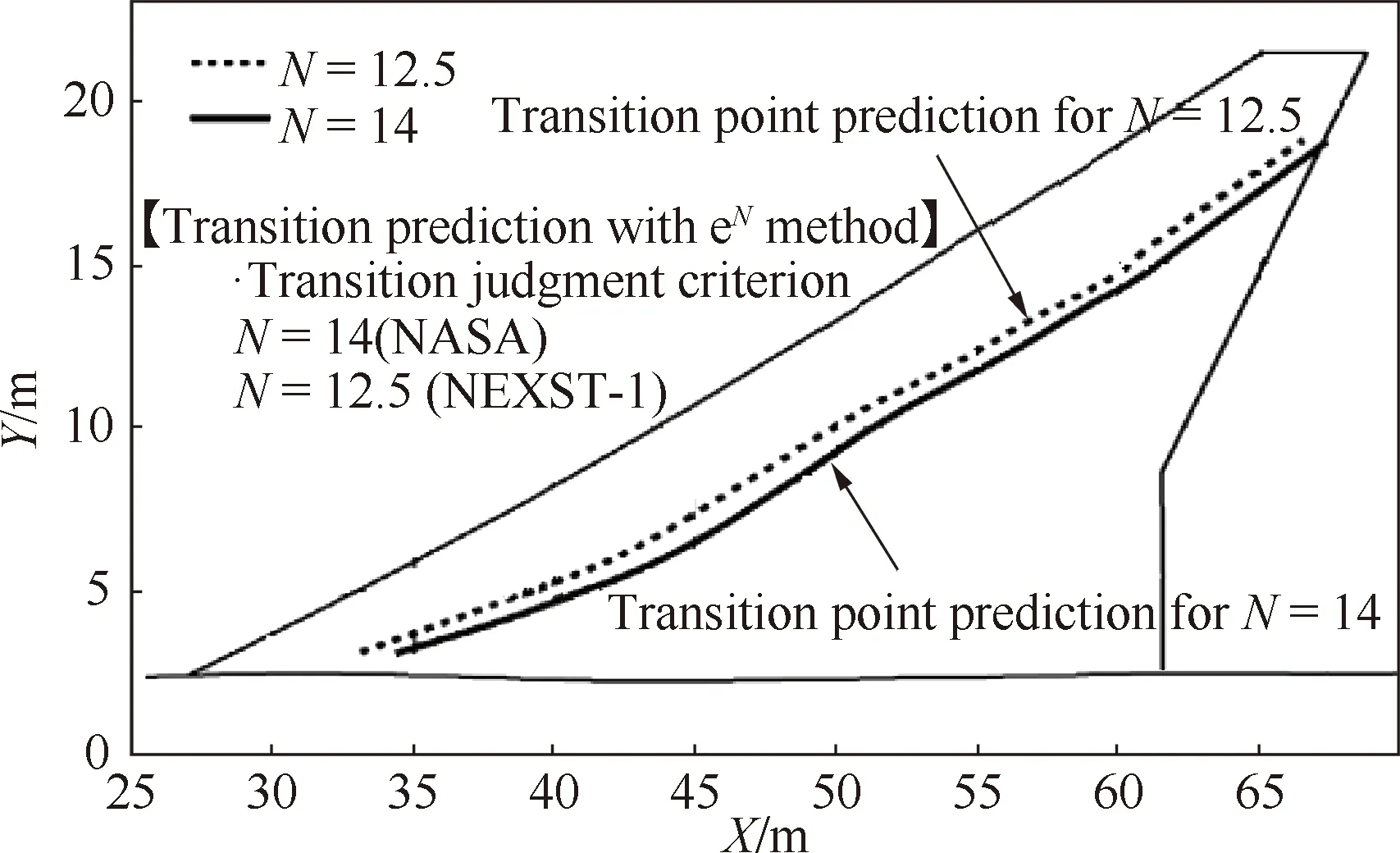
图49 高雷诺数条件下新的理想压力分布的转捩分析[109]
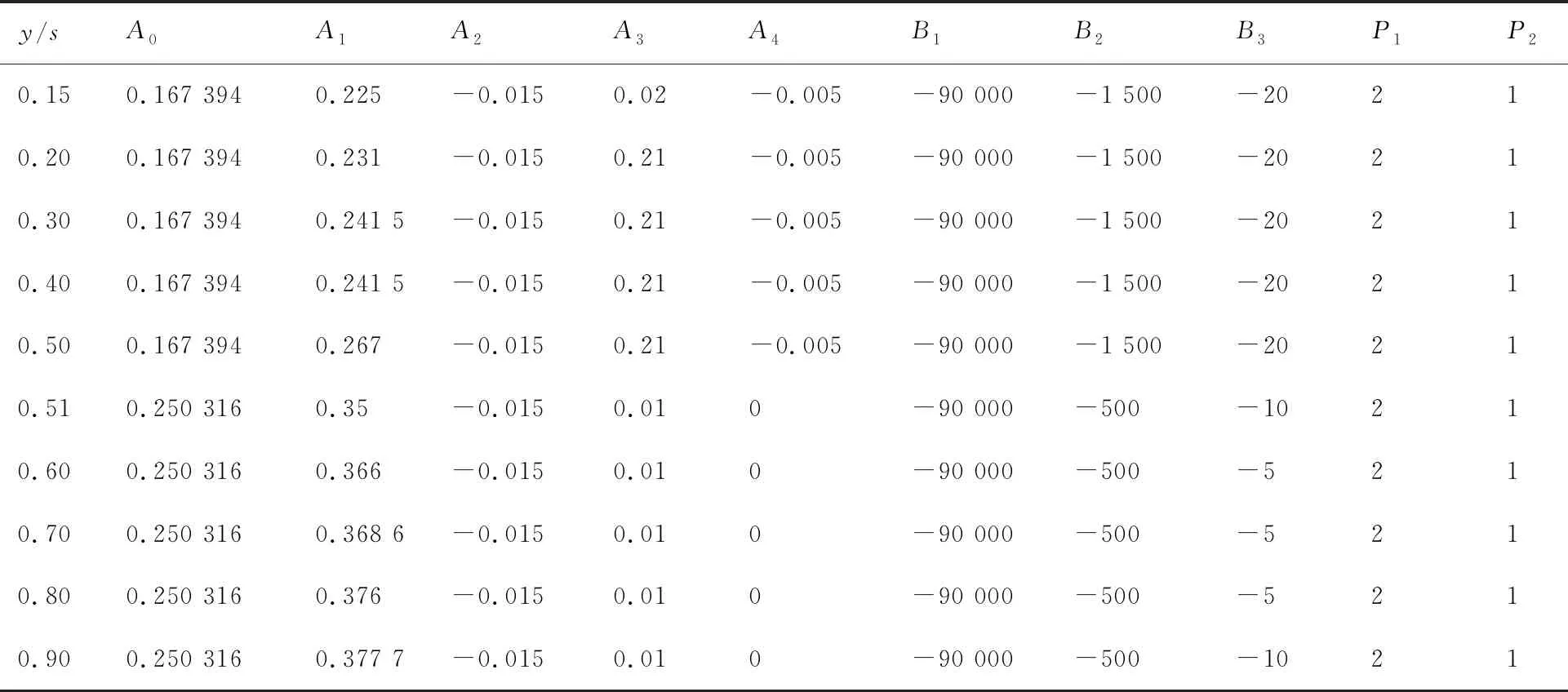
表2 新的理想压力分布最佳系数组合[109]
4.3 法国ONERA和意大利CIRA的联合设计案例
ONERA(法国航空航天研究院)与CIRA(意大利航空航天研究中心)在欧盟的SUPERTRAC项目[115]里联合开展了关于超声速商用喷气布局大后掠角NLF机翼的气动外形优化的研究工作。基本构型由达索航空公司提供,如图50所示[116-117]。内侧机翼的前缘后掠角为65°,外侧机翼的前缘后掠角为56°,机翼半翼展为9.35 m,展弦比为3.5,巡航飞行马赫数为1.6。
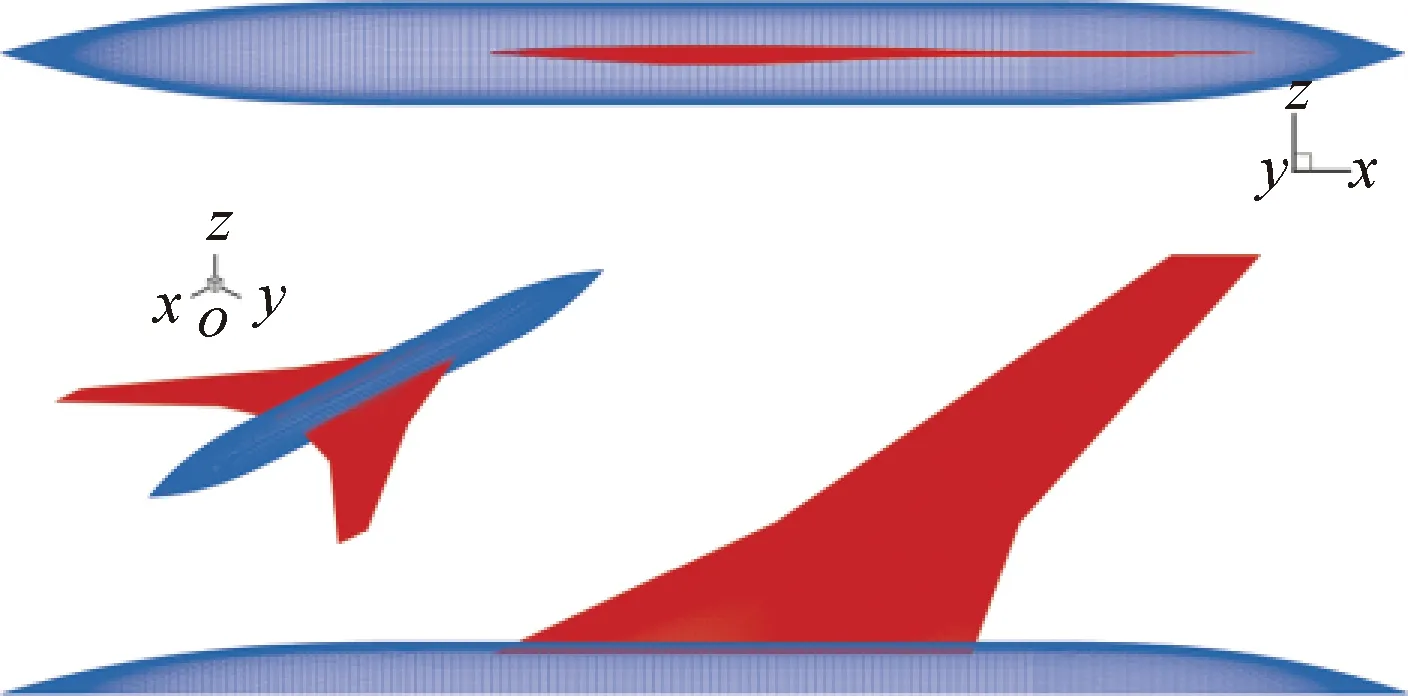
图50 基本模型的几何形状[116-117]
CIRA和ONERA分别采用全局优化和局部优化的策略开展NLF的气动优化研究。全局优化方法的优点是可让整个形状根据沿机翼的气动条件的变化而变化,有更大的灵活性,可在满足总升力、阻力和俯仰力矩系数的气动约束的同时,优化自然层流特性。局部优化方法侧重于机翼前缘周围的局部形状修改,根据前人的设计经验,这一区域的形状变化更有可能在流场中引入不同的流动特性。具体的优化过程如图51所示[117]。
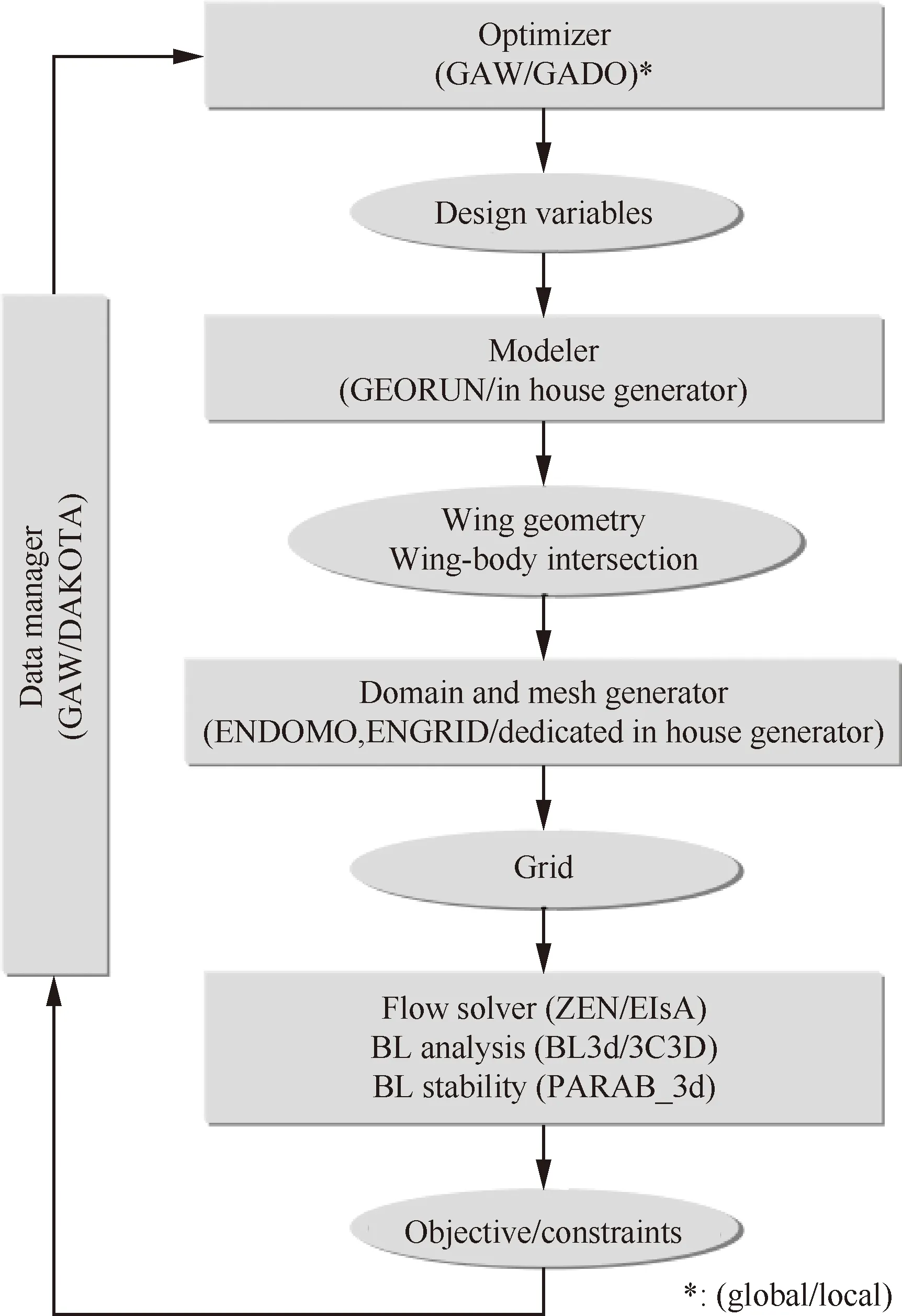
图51 机翼设计链[117]
CIRA全局优化的结果如图52[117]和图53[117]所示。从压力分布看,外翼Sec=20截面的压力分布更接近于NLF机翼的理想压力分布;N因子等值线图也证实了,外翼Sec=20截面的层流效应优于其他截面。机翼表面的压力分布状况影响着从层流到湍流的转捩过程,采用全局优化的方案,通过对机翼剖面形状的修改,抑制了边界层内扰动的增长,实现了自然层流区域最大化的目标。
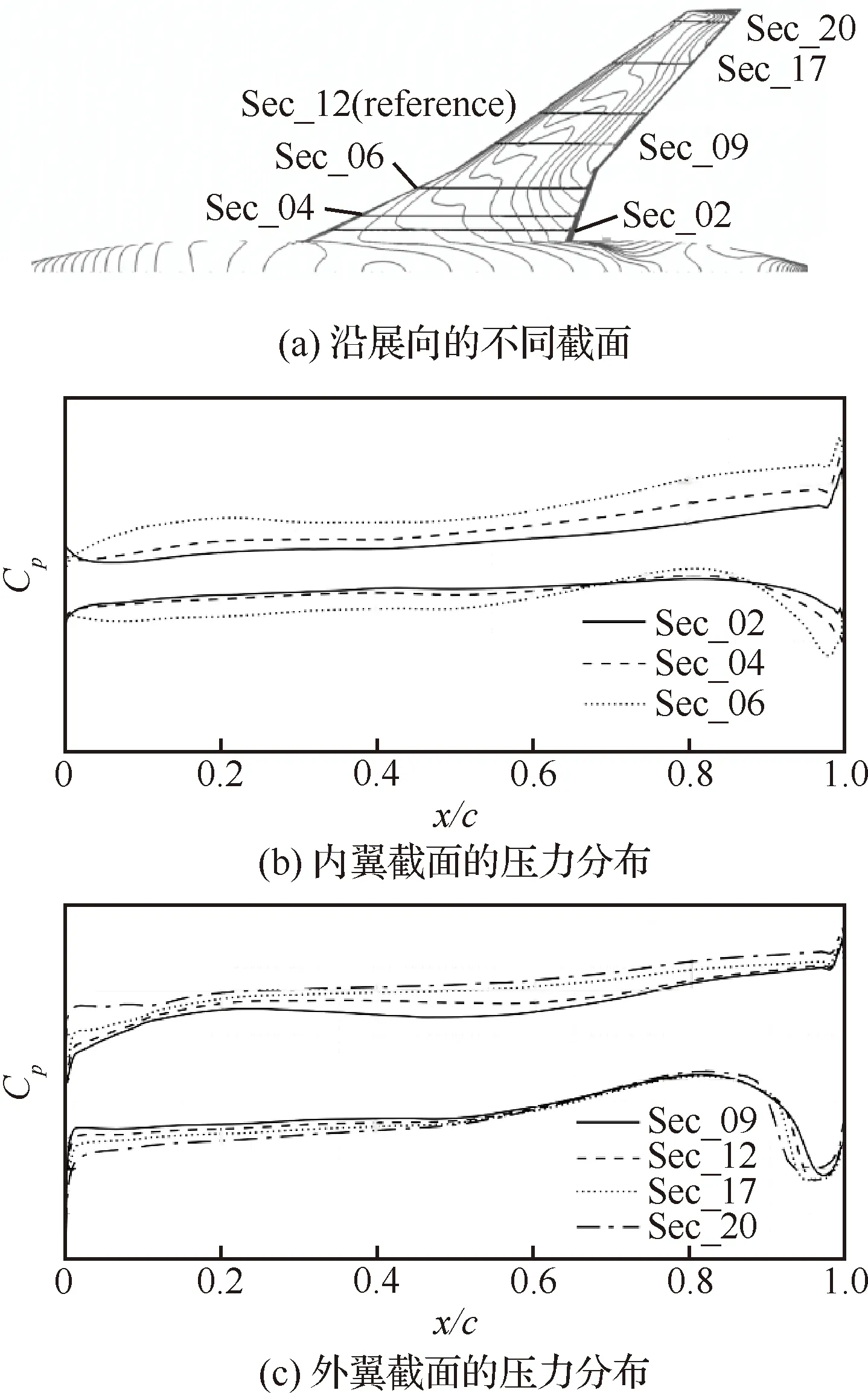
图52 全局优化的压力分布[117]
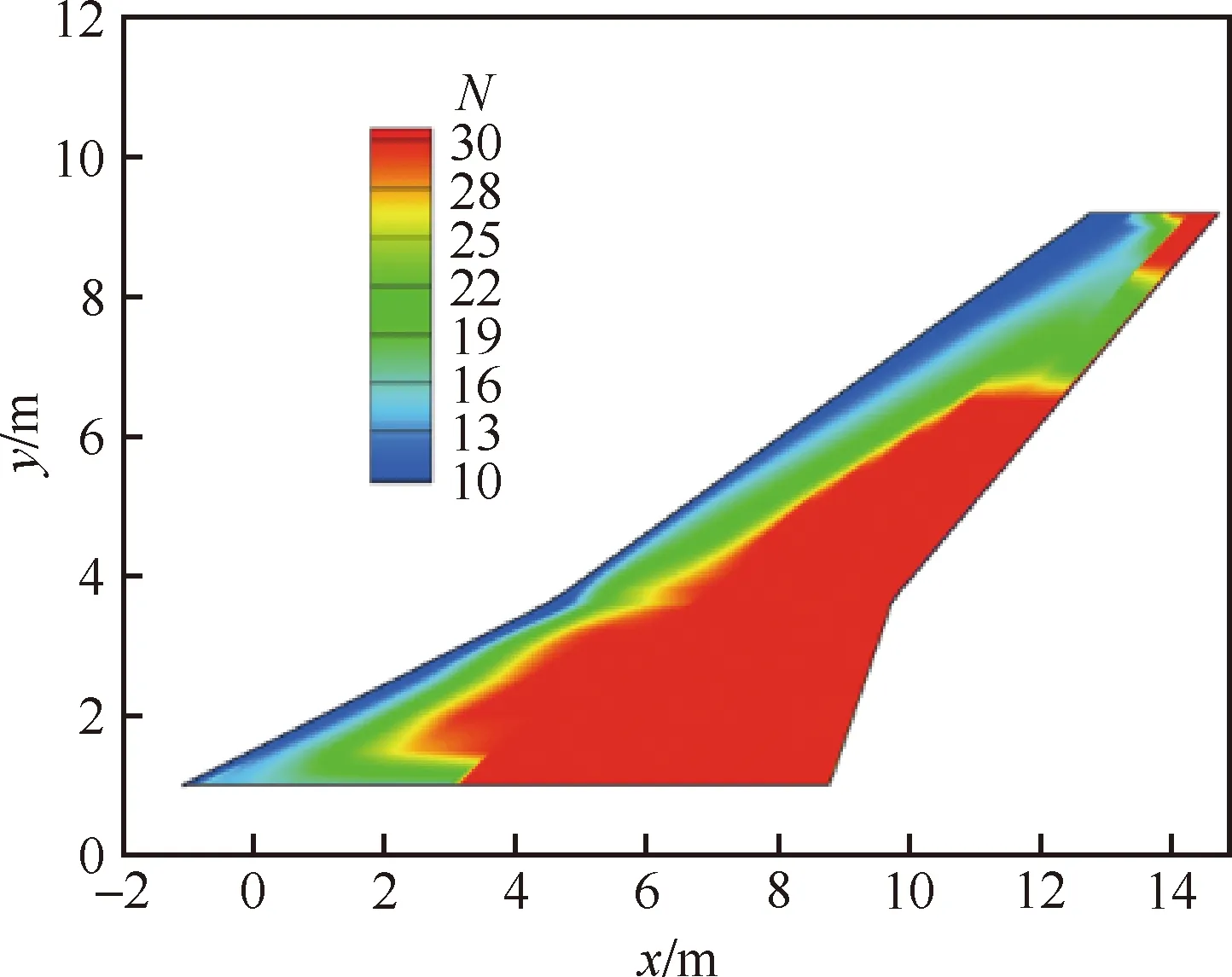
图53 全局优化的N因子等值线图[117]
ONERA局部优化的结果如图54[117]和图55[117]所示。J=20截面的压力峰值引起了流动分离,导致外翼与内翼连接处出现了低N因子区域(蓝色区域)。从其余截面的优化结果来看,局部优化通过对机翼前缘局部形状的修改,达到了超声速层流布局优化的目的。
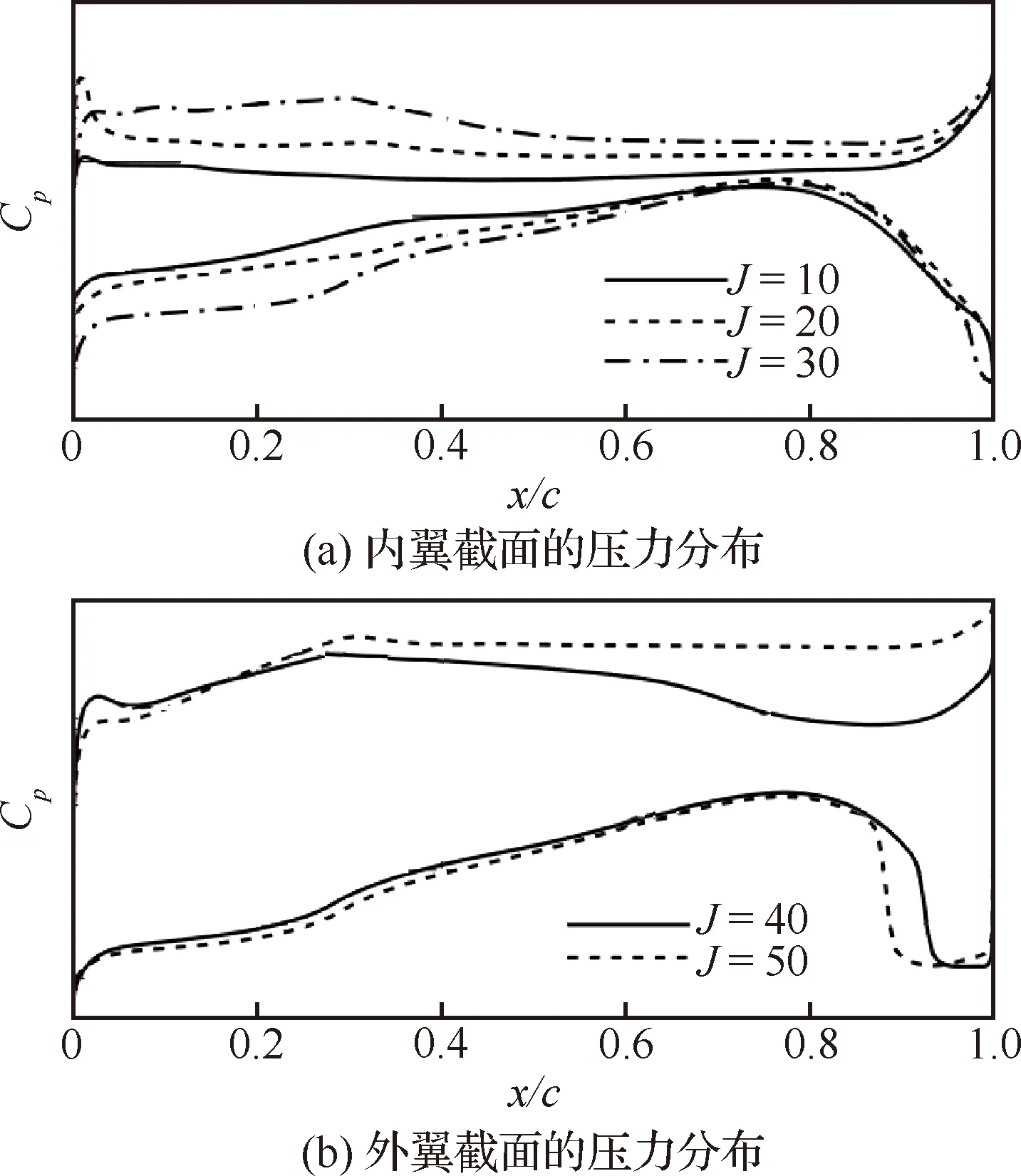
图54 局部优化的压力分布[117]
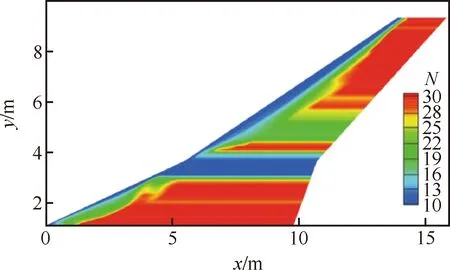
图55 局部优化的N因子等值线图[117]
4.4 航空工业空气动力研究院与西北工业大学联合设计案例
近期航空工业空气动力研究院与西北工业大学联合开展了超声速大后掠等直机翼层流风洞试验标准模型的设计与评估工作。
针对超声速大后掠机翼的横流转捩问题,拟在更接近真实飞行条件下开展试验研究,即采用更大尺寸的机翼和更高雷诺数的试验环境。参考 Owens等[53]的研究,设计了超声速大后掠等直机翼层流风洞试验标准模型。该模型保持了尽可能简单的机翼几何形状,以便于计算流体力学建模,同时仍能捕捉超声速后掠机翼的横流转捩现象。试验风洞为航空工业空气动力研究院的FL-60超声速风洞, 试验段尺寸为1.2 m×1.2 m,来流湍流度低于7‰。
模型参数如图56所示,根弦长为946 mm,垂直于前缘的翼型弦长为400 mm,翼型最大厚度40 mm,展长600 mm,机翼前缘后掠角65°,剖面翼型为双弧翼型,前缘半径为0.254 mm。双凸翼型的设计保证了机翼无凹曲面,避免Görtler涡的产生;较小的前缘半径也保证了前缘线雷诺数Reθ小于100,避免前缘污染和前缘线自然转捩。
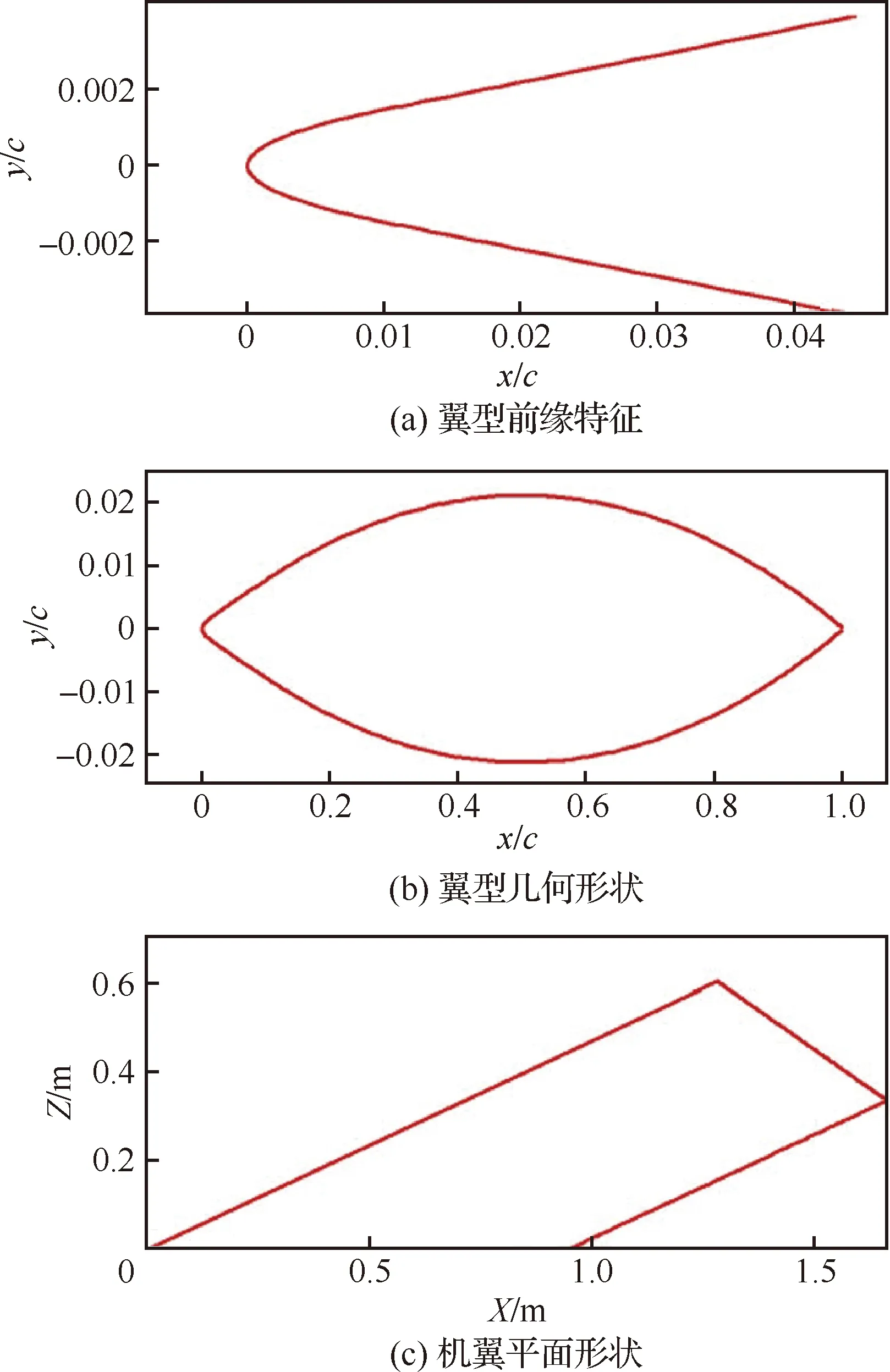
图56 后掠翼几何形状
图57为模型的表面压力分布和剖面弦向压力分布。计算状态参考风洞试验状态:来流马赫数为2.0,迎角0°,单位雷诺数为18.41×106/m。由弦向的压力分布曲线可以看出,机翼表面整体保持顺压梯度,预计会在前缘附近发生由横流不稳定性主导的转捩。
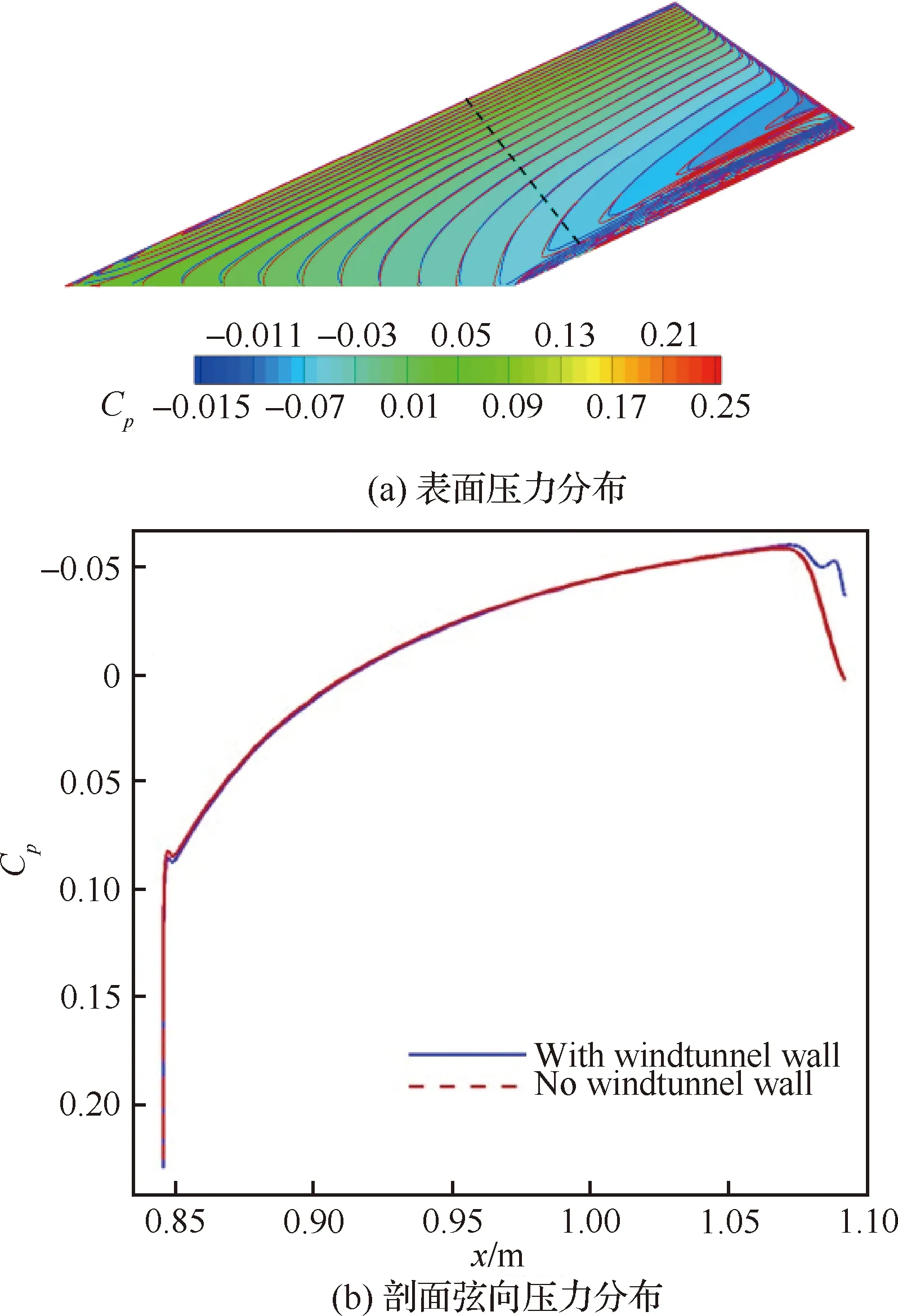
图57 机翼表面压力云图和弦向压力分布曲线
层流评估采用的是西北工业大学自主研发的耦合eN转捩预测方法的PMNS3D软件[68]。图58 为单位雷诺数为18.41×106/m时的横流速度型。由于前缘逆压影响,横流速度型在x/c=0.01处第1次反向,在随后的顺压影响下,横流速度型在x/c=0.02处第2次反向。
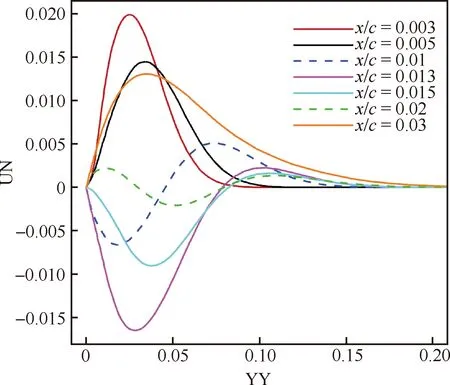
图58 横流速度型分布
图59为单位雷诺数为18.41×106/m时,不同频率扰动的放大率随波角的变化情况,可见不稳定扰动均在波角为正的方向增长,因此均为横流行波扰动。图60和图61分别是不同频率下的横流扰动N值包络线以及不同波数的横流驻波、横流行波扰动N值。可以看出,随着频率从0 Hz 增加到23 kHz,横流不稳定增强;当频率进一步增加到36 kHz时,横流不稳定性在垂直前缘距离约70 mm的位置下游减弱,而在其上游略有增强;此外,最不稳定横流驻波的展向波数约为3 085/m,而23 kHz时最不稳定横流行波的展向波数约为2 021/m,略低于横流驻波。
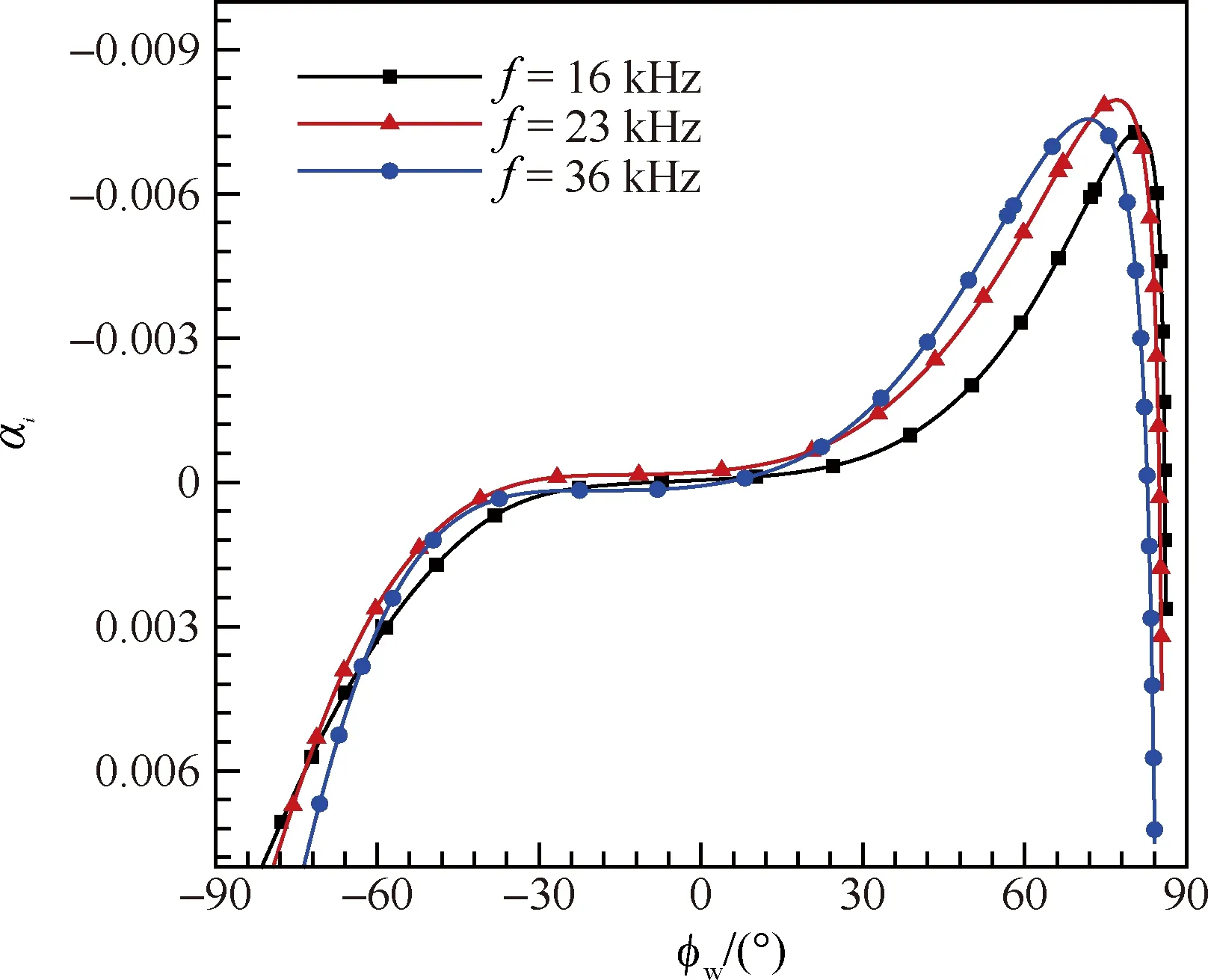
图59 单位雷诺数为18.41×106/m时不同频率的扰动放大率随波角的变化(xn=50 mm)
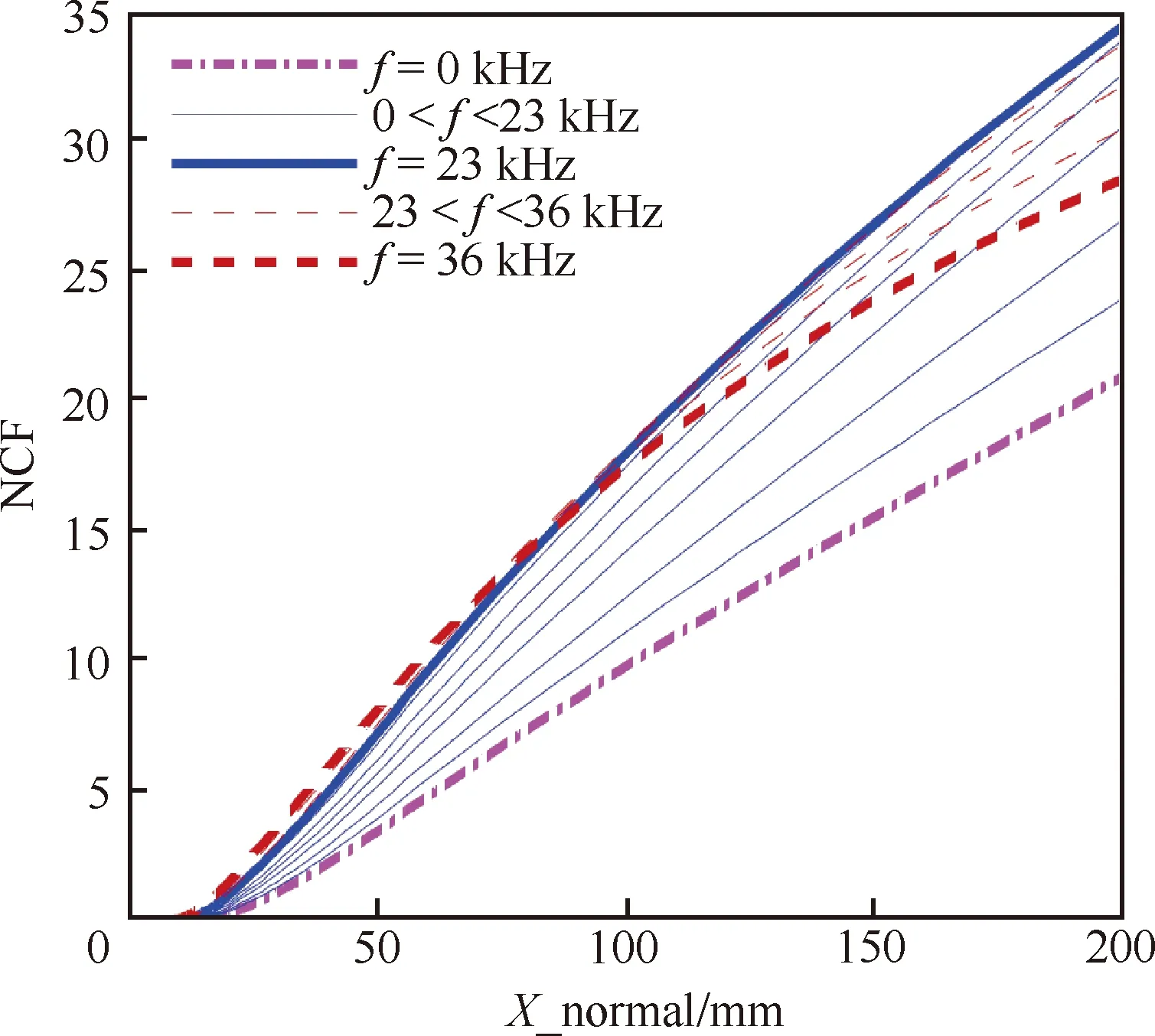
图60 单位雷诺数为18.41×106/m时不同频率的横流驻波和行波扰动N值包络线

图61 单位雷诺数为18.41×106/m时横流驻波和行波N值
后续将开展风洞试验研究,对横流驻波和行波进行测量。这里简要介绍一下试验方案:
1) 采用升华法和红外热像技术捕获模型表面的转捩图案,通过图像处理提取驻波空间波长数据。
2) 采用动态压力传感器测量模型表面的压力脉动,通过信号相关性分析,计算行波波角、相速度。
3) 分别改变来流雷诺数、表面粗糙度,研究这两个因素对横流不稳定性的影响。
5 总结与展望
本文以新一代超声速民机的巡航减阻问题为背景,详细地介绍了国内外在超声速飞机层流布局设计与评估技术方面的研究现状与进展:
1) 在超声速层流布局设计技术方面:① 针对中等雷诺数状态的自然层流设计技术已经得到了很好的验证,但在非设计点以及真实尺寸飞机的高雷诺数下,还不能取得令人满意的效果;② 以 声学超表面、分布式粗糙元、等离子体激励器为代表的层流控制技术展现出良好的工业应用前景,但离实际应用尚有距离,还需更深入地进行研究。
2) 在超声速层流设计评估技术方面:① 以eN方法和间歇因子输运模型为代表的转捩数值模拟技术得到了广泛地应用与发展,但在准确预测转捩位置上还存在不足;② 由于来流扰动较大和尺寸限制,风洞试验评估的层流结果与飞行试验存在较大差距,如何通过风洞试验数据预测真实飞行的转捩情况是风洞试验层流评估技术面临的主要难题;③ 飞行试验能获得最为真实的转捩数据,但受制于试验成本和测量技术限制,目前相关的数据积累较少,还不足以对数值评估和风洞试验评估提供有效的指导。
综合来看,超声速飞机层流布局设计与评估技术未来应当着重考虑以下几个方面发展:
1) 寻找适用于接近实际飞行状态的高雷诺数条件的自然层流机翼几何外型,特别是在飞行参数小范围偏离设计点时,仍能保持一定的鲁棒性,以适应实际航行中的条件微幅变化。
2) 考虑采用流动控制技术延迟机翼表面边界层转捩,特别是采用流动控制与自然层流协同设计的方式,获得更加鲁棒的设计效果。
3) 结合地面风洞试验和飞行试验数据,开展转捩模型参数标定,提高转捩数值预测技术和程序的可靠性。
4) 开展超声速布局的转捩问题的天地一致性研究,建立数值模拟、风洞试验与飞行试验的天地换算关系,进一步提高层流布局设计评估技术的工程实用化。
猜你喜欢
汽车实用技术(2022年9期)2022-05-20
煤气与热力(2021年3期)2021-06-09
大飞机(2018年6期)2018-05-14
空气动力学学报(2018年2期)2018-04-25
北京航空航天大学学报(2017年8期)2017-12-20
北京航空航天大学学报(2017年5期)2017-11-23
科技视界(2016年15期)2016-06-30
中国继续医学教育(2015年1期)2016-01-06
中成药(2014年11期)2014-02-28
科技视界(2012年20期)2012-08-29