
Adaptive Neural Network Control for Euler-Lagrangian Systems with Uncertainties
2022-12-10 05:18CHENGXinLUWenke卢文科LIUHuashan刘华山
CHENG Xin(程 新), LU Wenke(卢文科), LIU Huashan(刘华山), 2*
1 College of Information Science and Technology, Donghua University, Shanghai 201620, China
2 Engineering Research Center of Digitized Textile and Fashion Technology, Ministry of Education, Shanghai 201620, China
Abstract: An adaptive controller involving a neural network (NN) compensator is proposed to resist the uncertainties in the Euler-Lagrangian system(ELS). Firstly, a proportional-differential(PD) control law is designed for the nominal model. Meanwhile, the uncertainties including model error and external disturbance are separated from the closed-loop system. Then, an adaptive NN compensator based on the online training mode is proposed to eliminate the adverse effect of the uncertainties. In addition, the stability of the closed-loop system is proved by Lyapunov theory. Finally, the effectiveness of the proposed approach is verified on a two-degree-of-freedom robot manipulator.
Key words: adaptive control; neural network(NN); uncertainty; compensator; Euler-Lagrangian system(ELS)
Introduction
This article is concerned with uncertainty approximation and torque compensation[1]of the closed-loop system through an adaptive approach based on a neural network (NN)[2-3]. Particularly, it investigates an online approximation for unmodeled system dynamics (or model errors) and external disturbances[4-5]in a class of Euler-Lagrangian systems (ELSs), which usually share similar mathematical expressions[6-7].
Many mathematical models of mechanical systems, such as robot manipulators[8], autonomous vehicles, and satellites, can all be expressed as Euler-Lagrangian models. Because of its applicability, it has attracted widespread attention. A robust output feedback control framework is proposed in Ref. [9] and the unmeasurable states and the uncertain dynamics terms are estimated through two extended high gain observers. The distributed formation containment control problem of ELSs with unknown control directions is addressed[10]. According to the principle of the Euler-Lagrangian methodology, the comprehensive dynamics is decomposed into the position and attitude subsystems[11]to design the controller.
Feedforward compensation is a critical technique to deal with the uncertainties in ELSs. For example, a disturbance observer based on sliding mode strategy is designed[7]to compensate the errors caused by both the mismatched and matched disturbances of the system. The valve dynamics are effectively compensated by the robust delay compensating feedback with a finite integral[12].
Although such achievements for ELSs, there still exist several challenges and the compensation for the uncertainties and external disturbance remains open. NNs have excellent abilities of nonlinear fitting and complex mapping, and furthermore, their learning rules are simple and easy to implement on the computer[13]. Forward-feedback NN, as a favorable NN structure, can approximate any continuous nonlinear function with arbitrary precision, and also features rapid convergence, good adaptation and strong self-learning[14]. An adaptive and robust NN-based controller with online learning laws is proposed in Ref. [15] to handle unmodeled parts in the system dynamics and external forces. Motivated by the above works, a forward-feedback NN with online learning structure is utilized in this paper to compensate the errors caused by the dynamics uncertainties and/or external disturbances.
In this work, we develop an adaptive control strategy with an NN compensator for ELSs with uncertainties. The main contribution is that, for a general ELS, the uncertainties are decoupled from the system by designing a nominal model control law, and then, an online training NN compensator is designed to provide feedforward torque compensation to eliminate the negative impact of uncertainties on the closed-loop system. Besides, a strict stability analysis is provided via Lyapunov theorem.
The rest of this paper is organized as follows: section 1 deals with the design of the adaptive controller involving proportional-differential(PD) control strategy and an NN compensator for ELSs. In section 2, the stability of the whole closed-loop system is analyzed. Validation on a two-degree-of-freedom robot manipulator is made in section 3. Some conclusions are given in section 4.
1 Controller Design
1.1 Dynamic model
The dynamics of a generaln-degree-of-freedom ELSs can be written as[7]

(1)

1.2 PD control strategy design
If the modeling is accurate and there is no external disturbance,i.e.,D=0, the PD control law for the system Eq. (1) can be designed as
(2)

Substituting control law Eq. (2) into Eq. (1), we can get a stable closed-loop system
(3)

Then, the control law for the nominal model can be expressed as
(4)
Substituting Eq. (4) into Eq. (1), we get
(5)

(6)
As can be seen in Eq. (6), due to the imprecise modeling, the term on the right side of Eq. (6) may lead to a decrease in control performance, and even may invalidate the control strategy and cause the divergence of the system. Hence, the inaccuracy of the model and external disturbances need to be compensated to ensure the effectiveness of the controller. In the next section, an adaptive NN compensator is designed to offset the negative effects caused by the inaccuracy of the model and external disturbances.
1.3 Adaptive NN compensator
Define the uncertainties in Eq. (6) as
(7)
To eliminate uncertainties, the control law with the modified term can be designed as

(8)

Define the adaptive NN compensator as
(9)
Thenf(x) can be redefined as

(10)
Define the approximation error of the weight value as
(11)


(12)
Hence, the uncertaintiesf(x) finally can be represented by the adaptive NN compensator as

(13)

τ=τnom+τcom.
(14)
Substituting Eqs. (4) and (14) into Eq. (8), we can get
(15)

(16)
Considering the online training mode, an adaptive law is defined as
(17)
whereγis constant andγ>0.
2 Stability Analysis
The overall stability of the closed-loop system in terms of the approximation error of the connecting weight value of the NN compensator is analyzed in this section.
Theorem1Considering the ELSs described by Eq. (1) with the proposed adaptive NN controller Eqs. (4) and (14), Eq. (18) is
(18)


(19)
The derivative ofVwith respect totis
(20)
Substituting Eq. (16) into Eq. (20), Eq. (20) becomes

(22)
Substituting the adaptive law Eq.(17) into Eq.(22), we get
(23)



(24)

3 Numerical Simulation
In this section, simulation verifications are made on a 2-DoF robot manipulator. Its parameters are given as

(25)
Considering the stability constraints of the system (18), the parameters in the proposed PD controller combining the adaptive NN compensator (named as PD+NN) are finally selected ask=diag[9, 9],kd=diag[10, 10] andQ=diag[50, 50, 50, 50]. The number of layers in NN is set to three layers,i.e., the first layer is the input layer, the second layer is the hidden layer in which the layer can be added to enhance the accuracy of the approximation of the NN and the final layer is the output layer. The activation function in the hidden layer is selected as the Gaussian function. The center matrix of NN is
and the bandwidth isbi=3, (i=1, 2, …, 5).

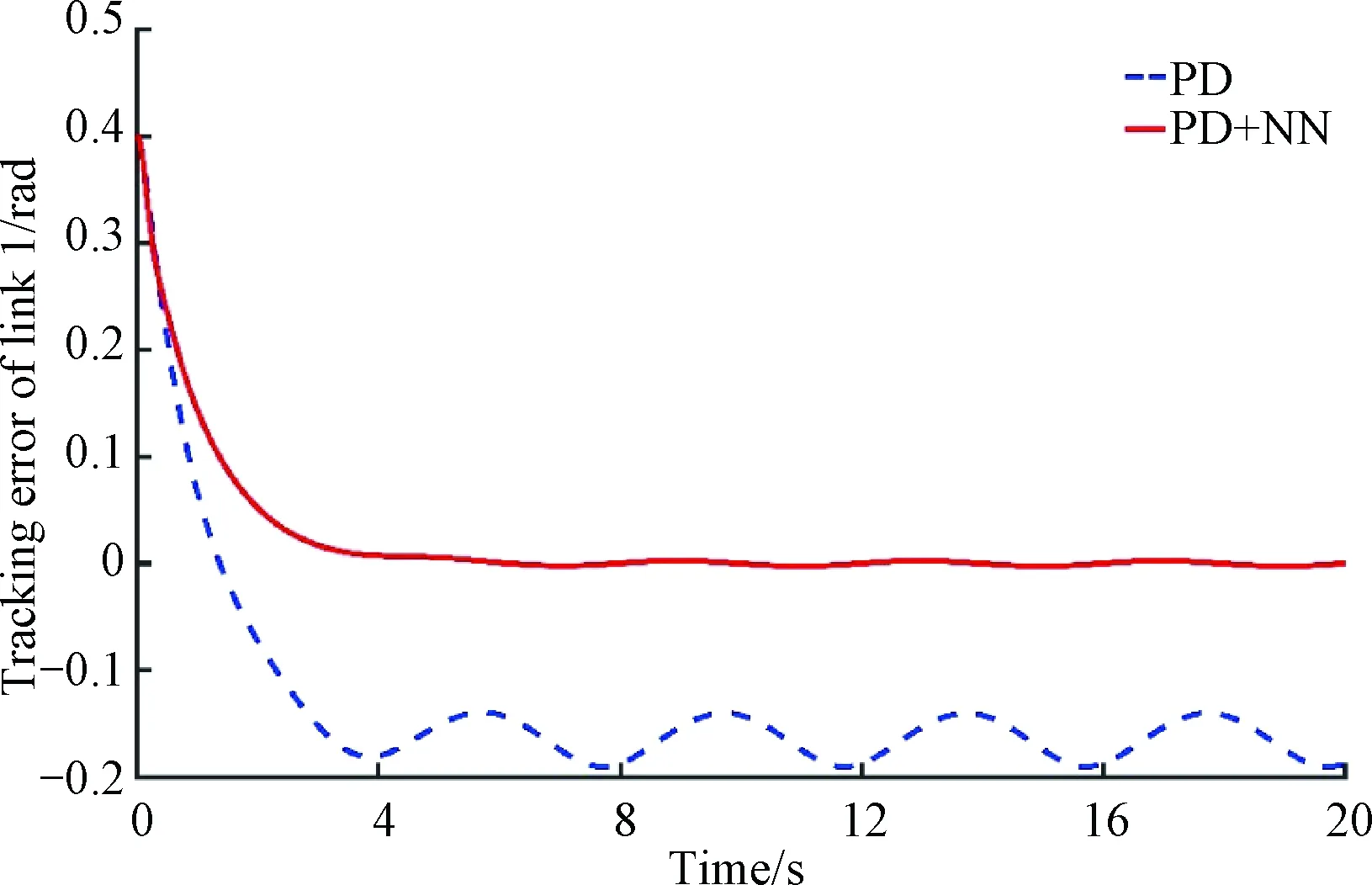
Fig. 1 Tracking error of link 1
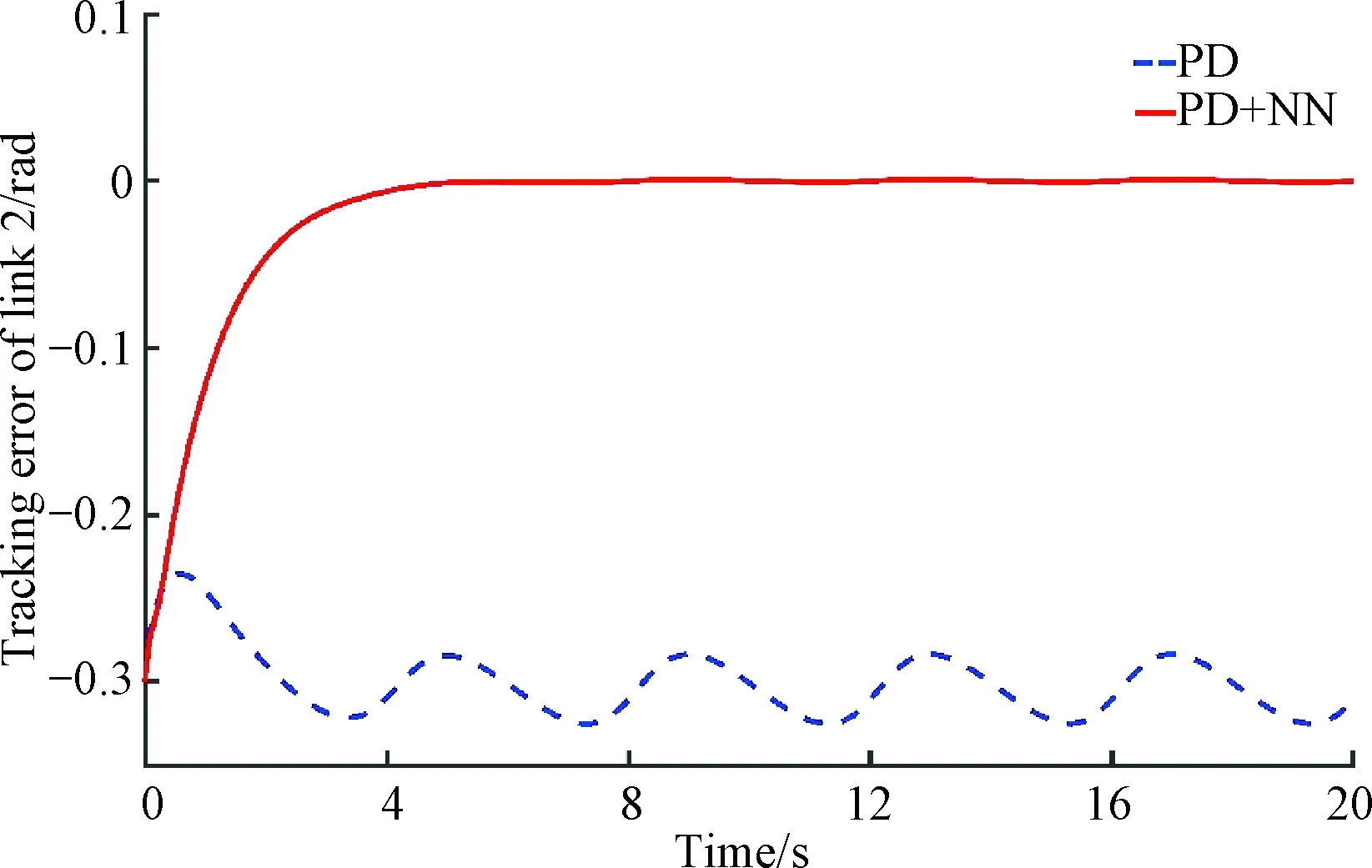
Fig. 2 Tracking error of link 2
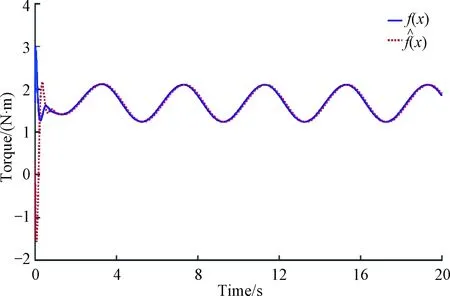
Fig. 3 Approximation value of f(x) in joint 1
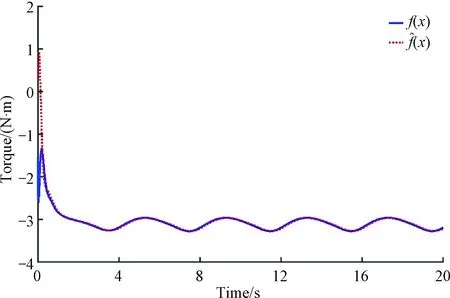
Fig. 4 Approximation value of f(x) in joint 2

Fig. 5 Torque control input for joint 1
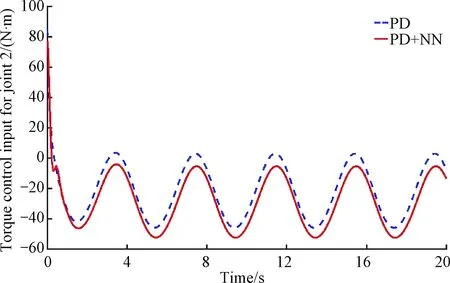
Fig. 6 Torque control input for joint 2
4 Conclusions
An adaptive NN control strategy for ELSs with uncertainties is investigated. We first designed the nominal model control law for the ideal nominal model to obtain a stable closed-loop system. Subsequently, the model errors and external disturbances are decomposed from the closed-loop system. In order to effectively deal with these uncertainties, we adopt an NN strategy to design a torque compensator that works in an online training mode to fit these uncertainties, and to offset the adverse effects of uncertainties in a form of feedforward compensation. The effectiveness of the traditional PD control strategy combined with the NN compensator has been verified in the simulation examples on our two-degree-of-freedom robot platform.
猜你喜欢
北京林业大学学报(社会科学版)(2022年4期)2023-01-04
Chinese Physics B(2022年8期)2022-08-31
小学生学习指导(中年级)(2021年3期)2021-04-06
中学生博览·文艺憩(2020年3期)2020-08-14
少儿美术(快乐历史地理)(2020年12期)2020-06-09
求学·文科版(2019年6期)2019-06-12
金秋(2019年2期)2019-04-16
艺术家(2018年7期)2018-09-22
求学·文科版(2018年7期)2018-05-14
 Journal of Donghua University(English Edition)2022年5期
Journal of Donghua University(English Edition)2022年5期
- Journal of Donghua University(English Edition)的其它文章
- Finite-Time Stability for Nonlinear Fractional Differential Equations with Time Delay
- Adaptive Single Piecewise Interpolation Reproducing Kernel Method for Solving Fractional Partial Differential Equation
- Electromagnetic Transmission Characteristics of Y-Shaped and Y-Ring-Shaped Frequency Selective Fabrics
- Property of Polyimide/Flame-Retardant Viscose Blended Fabrics
- Classification of Young Females’ Body Shape in Jiaodong Area Based on 3D Morphological Characteristics
- Evaluation of Tactile Comfort of Underwear Fabrics