基于K60的多式联运港站智能管理系统设计
2022-12-21 05:52肖广兵谢心怡
河北软件职业技术学院学报 2022年4期
肖广兵,高 乐,谢心怡
(南京林业大学 汽车与交通工程学院,南京 210037)
0 引言
多式联运在各种运输方式和港站集、运、疏的衔接配合中处于结合部地位,是推动运输横向经济联合,组织发挥各种运输方式的特点和优势,提高综合运输效率的有效途径。但当前我国多式联运存在基础设施不足、系统协调度不够、信息系统不够完善等问题,导致载具与仓储设施智能化程度较低,各环节仍大范围采用人工调度管理,物流效率较低,信息延迟较高,各环节难以紧密衔接,调度管理效率较低,限制了多式联运作为物流系统实现“6S”目标重要组织模式的进一步推广与发展。目前,国内对于多式联运的研究主要集中在多式联运的运输组织方式,多式联运中各种运输方式的衔接体制,国际多式联运信息服务与管理等方面,而侧重于多式联运港站智能管理方面的研究较少,没能形成全面成熟的系统设计与配套软硬件整合的技术方案来解决现存的问题。
本文设计了一种基于K60的多式联运港站智能管理系统。该系统通过硬件模块完成以运输需求为导向的载具运力动态规划调度,同时将运输与仓储关键信息通过GPRS实时传输至上位机,实现多式联运港站全环节、全要素智能管理,一定程度上可提高多式联运中港站环节的管理效率,进而提升多式联运物流模式的实效性。
1 系统模型
本系统以K60单片机为核心,通过无线通讯模块,运输载具与上位机管理界面完成运输需求、运输目的以及集装箱信息等物流数据信息的传输与交互。管理人员可根据载具物流数据信息,定位模块上传的载具状态信息,结合港站内的装卸运力分布与集装箱仓储信息,动态规划载具的最佳运输路线、到达时刻表与装卸泊位,同时智能调度港站内装卸运力,协调衔接集装箱的仓储出入,集散中转等作业,从而加快物流周转速度,缩短载具停靠时间、仓储和装卸库场使用周期。通过射频识别模块可以分别完成港站全环节、全要素作业过程的匹配与信息录入,通过监控模块可以实时上传全港站的监控画面,以期有效预防并处置突发事件。
2 硬件电路设计
多式联运枢纽智能管理系统硬件电路主要包括:监测模块,定位模块,无线通讯模块,射频识别模块,数据处理模块等。
2.1 监控模块
本模块采用环视视觉传感器模组结合摄像标定技术方案,CCD[1]环视摄像头可在光线剧烈变化和边缘线复杂的道路场景下工作,经数据处理模块完成图像畸变系数的计算、图像还原以及透视处理,全网模组协同处理图像信息匹配高精度地图,进而实现全港站的全息可视化监控,并可实时传输高清低延迟的全息画面至上位机管理界面,完成对载具运输操作以及港站集装箱的仓储出入、集散中转等作业的全方位、全天候监控。CCD图像传感器电路如图1所示。
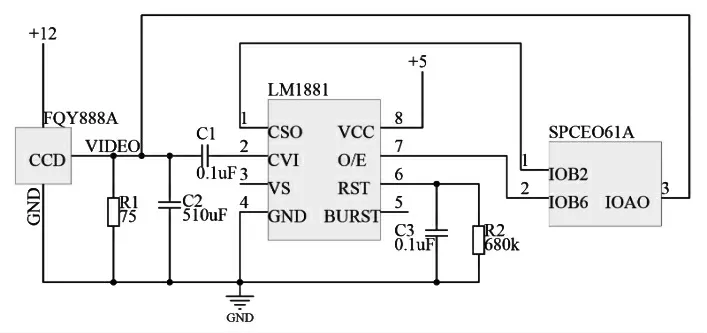
图1 CCD图像传感器电路
2.2 定位模块
本模块采用GPS模组结合SLAM技术方案,运输与装卸载具的高精度GPS定位信息经数据处理模块处理后生成动态轨迹信息,实时上传至上位机管理界面,管理人员可实时掌握港站内的运输需求与装卸运力时空分布,为载具的动态规划与港站内装卸运力智能调度的整体协调衔接提供数据支持,进而高效完成集装箱的仓储出入、集散中转等作业。GPS定位模组电路如图2所示。

图2 GPS定位模组电路
GPS接收机选用的LEA-5X模组结合车载,路侧与设施的监控模块环视视觉传感器模组通过同步定位与地图构建技术,将自身位姿估计与港站全息可视化高精度地图匹配,可实现精准位置姿态判断以及自主导航。
2.3 无线通信模块
本模块采用卫星通讯结合5G车路协同短距通讯的技术方案,卫星通讯模组具有传输距离远、传输速率高、信道频段宽、容量大的特点,可实现各模块与上位机管理界面的关键信息实时同步传输共享。卫星通信模组电路如图3所示。

图3 卫星通信模组电路
由车载OBU通讯模块、路侧RSU通讯模块以及其他数据传输通讯子系统共同组成的短距通讯系统,可实现港站人、车、路、环境的和谐统一与整体协同。在交叉口、仓储区域、装卸库场等典型场景下,可通过路协同完成通行时空资源的安全高效分配,同时可支持载具与路侧和设施的监控模块,定位模块交互。
2.4 射频识别模块
本模块广泛适配于运输载具、装卸载具、港内智能路侧单元以及仓储设施,可以实现对进出港运输载具的运输需求、运输目的以及集装箱信息等物流数据信息的实时采集并上传至上位机管理界面,为管理人员以物流数据信息为导向整体协调载具的动态规划与港站内装卸运力智能调度提供支持。在仓储环节,可完成全环节、全要素作业过程的匹配与信息录入,大大提高进出库搬运作业的效率。射频识别模组电路如图4所示。

图4 射频识别模组电路
射频识别模组电路SLRC610芯片采用高频系统典型的工作频段:915MHz、2.45GHz和5.08GHz,具有标签内数据量大、阅读距离远且阅读速度高、适应物体高速运动性能好等特点。
2.5 数据处理模块
本模块是运输与装卸载具智能设备、路侧智能设备、上位机管理界面三者数据交互的中心节点。各模块生成的数据需通过本模块可视化数据处理,由无线通讯模块实时上传至上位机管理界面。同时,上位机管理系统的指令、数据、语音信号及控制信号经无线通讯模块接收后,通过本模块处理生成具体操作指令,进而完成港站内全设备要素、全作业过程的信息交互。
如图5所示,本模块采用K60单片机作为数据处理核心。K60具有高性能、高精度的混合信号处理能力,运算速度快、精度高,运算能力较强,可支持各硬件模块不同类型数据的并行运算处理。

图5 K60最小系统电路
3 系统软件设计
软件设计选用Visual Basic 6.0软件开发环境,搭建集装箱多式联运物流信息管理系统的界面。
软件主界面由集装箱运输管理、集装箱仓储管理、多式联运枢纽管理、突发事件上报、问题反馈、个性化设置六个区域组成,如图6所示。

图6 软件主界面
普通用户身份可使用集装箱仓储管理、多式联运枢纽管理等功能;管理员身份在此基础上可使用集装箱运输管理功能。系统软件流程图见图7。
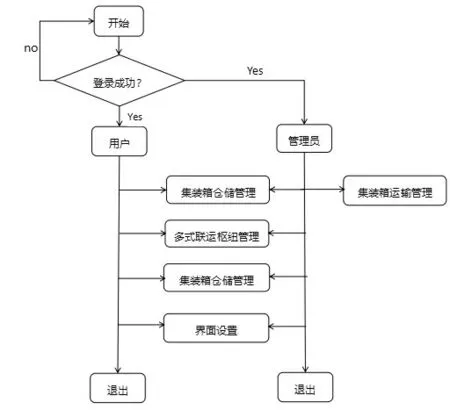
图7 系统软件流程图
根据货物属性、起点终点、运费、企业特殊要求等要素,通过算法生成线路最优、运费最少、货损最少、满足企业要求的运输方案以供参考(如图8所示)。通过GPS技术、RFID技术,形成运输信息网络,及时掌握集装箱动态信息,合成最优调度/租赁方案,合理分配箱体,避免出现因缺少集装箱而导致的运输时间延长等问题(如图9所示)。根据货物的属性以及入库出库时间等因素对货物位置进行合理安排,以减少工作量,节省装卸时间,提高仓储效率(如图10所示)。
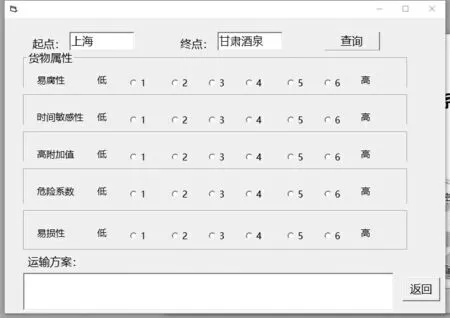
图8 最优运输方案规划

图9 空箱调运

图10 集装箱仓储管理
通过摄像头实现对仓库、路口以及事故频发地带的实时监控。管理人员可通过软件客户端相关界面,打开实时监控画面窗口,实时全面掌握道路情况、运载工具情况以及装卸搬运情况。[9]管理员收到突发事件处理提示后,通过查看突发事件详情得出初步判断,再结合“查看事故道路监控”和“现场工作人员联系表”具体掌握事故发生原因(如图11所示)。
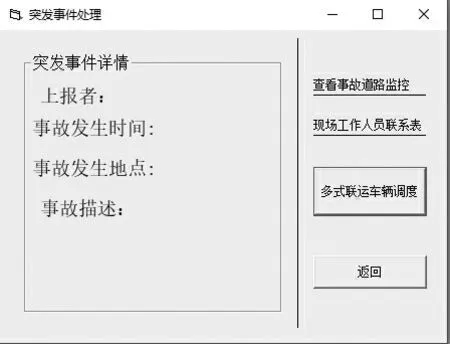
图11 突发事件处理
通过无线通讯模块完成运输载具与上位机管理界面物流数据信息的传输与交互,管理人员可根据载具物流数据信息,定位模块上传的载具状态信息;结合港站内的装卸运力分布与集装箱仓储信息,动态规划载具的最佳运输路线、到达时刻表与装卸泊位;同时智能调度港站内装卸运力,协调衔接集装箱的仓储出入、集散中转等作业,从而加快物流周转速度,缩短载具停靠时间,提高仓储和装卸库场使用效率(如图12所示)。
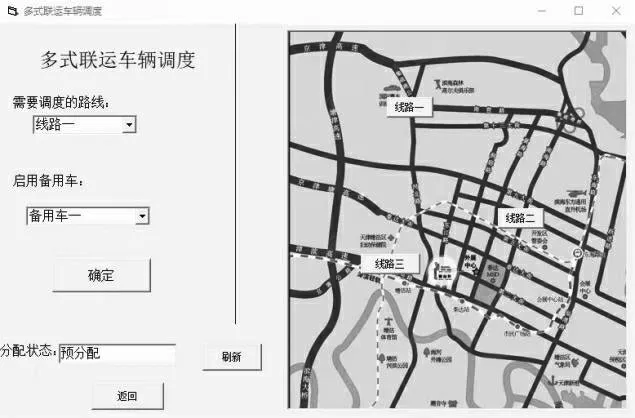
图12 多式联运车辆调度
对车辆设备运行情况进行监测管理,实时上传设备的信号强弱、巡检、设备连接等信息,对出现问题的设备及时上报维修,保证车辆设备的正常运行。面对突发情况,可以紧急调度备用车辆前往现场,确保运输线路高效顺畅连接(如图13所示)。
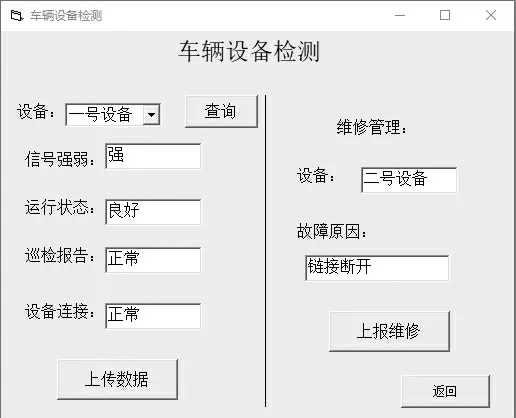
图13 车辆设备检测
4 结语
本文设计的集装箱多式联运智能管理系统以K60单片机为核心,通过硬件模块完成集装箱多式联运关键信息的精确感知与实时上传,车辆调度的处理决策,最佳运输路线动态规划,港站内装卸运力智能调度。在一定程度上解决了当前我国多式联运基础设施不足,系统协调度不够,信息系统不够完善等问题,在一定程度上提高了多式联运对于物流行业的实效性。
猜你喜欢
军事文摘(2023年5期)2023-03-27
科技信息·学术版(2021年20期)2021-11-02
宁夏工程技术(2021年2期)2021-07-30
机械(2020年6期)2020-07-15
艺术科技(2019年15期)2019-11-23
现代装饰(2019年7期)2019-07-25
电子制作(2019年12期)2019-07-16
中国交通信息化(2018年5期)2018-08-21
电子制作(2018年8期)2018-06-26
中国公路(2017年8期)2017-07-21