直升机吊挂前飞抗扰动控制
2022-12-29 08:59白红丽程东权
直升机技术 2022年4期
白红丽,程东权
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
直升机吊挂飞行应用于包括森林灭火[1]、登陆作战中的装备投送、反潜作战中的拖曳声纳探测以及远洋作战中的垂直补给等多种任务。在直升机吊挂飞行过程中,如果不对吊挂物摆角进行控制,吊挂物容易受到干扰而持续摆动。同时,吊挂物自身摆动对直升机姿态的稳定具有较大干扰[2]。这些扰动威胁着直升机的安全飞行,影响了直升机的操纵品质[3],对任务执行造成了严重困难。因此,抑制直升机吊挂前飞时的扰动对直升机稳定飞行、安全执行任务有重要作用。
国内外有很多学者对直升机吊挂飞行问题进行研究。曹龙[4]、王照瑞[5]、GUGLIERI[6]等人对直升机-吊挂系统建模并进行稳定性分析。OKTAY[7]基于飞行动力学模型分析了动稳定性对吊挂参数的敏感性。戴勇[8]等人使用了输入整形前馈控制和缆位角反馈控制方法对无人直升机吊挂运输系统进行控制。
本文针对直升机吊挂前飞过程中吊挂物受扰摆动以及吊挂物摆动对直升机稳定飞行的影响问题,引入吊挂物摆动角信息进行控制律设计,同时设计终端滑模自抗扰控制算法估计系统所受扰动并对其进行补偿。仿真对比结果表明,本文设计的控制算法能够有效抑制直升机吊挂前飞过程中吊挂物的摆动,减小吊挂物摆动对直升机本体姿态的干扰,提高系统响应速度和飞行精度,对未来直升机吊挂飞行精度及安全性的提高具有重要价值。
1 直升机-吊挂系统模型
为了研究直升机吊挂前飞过程中吊挂物的摆动情况以及吊挂物受扰摆动对直升机姿态的影响,首先需要对直升机-吊挂系统前飞过程进行简化建模。直升机-吊挂系统如图1所示,其中θL和φL为吊挂货物摆动角。
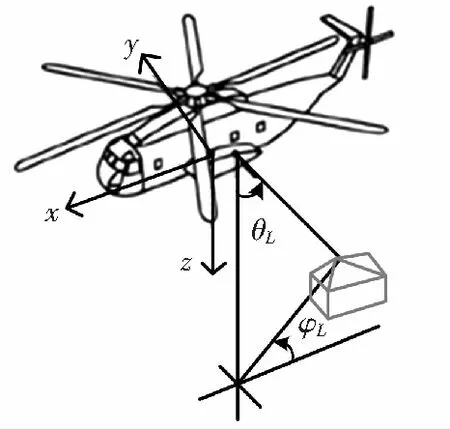
图1 直升机-吊挂系统结构示意图[3]
建模过程中有如下假设:
1)主要选取直升机OXZ剖面内的相关受力和运动状态进行分析;
2)忽略直升机发动机特性和旋翼特性,将输入直接定义为力;
3)将吊挂缆绳系统简化为简单的绳段,并忽略其质量;
4)吊挂物为规则刚体。
在模型受力分析中,主要考虑直升机旋翼提供的升力及前向力、直升机阻力、吊挂物阻力、直升机重力、吊挂物重力、缆绳的张力等。因此,可以得到理想状态下直升机-吊挂系统小扰动线性模型[9]为:
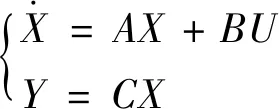
(1)

直升机吊挂前飞过程中,空气流动对直升机本体及吊挂货物带来的扰动会对直升机吊挂系统带来力和力矩的干扰。因此,直升机吊挂系统的模型应为:
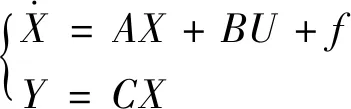
(2)
其中f为系统受到的扰动。
2 终端滑模自抗扰控制器设计及仿真分析
将直升机-吊挂系统的控制分为俯仰、倾斜、航向和高度四个通道。姿态控制框图如图2所示。
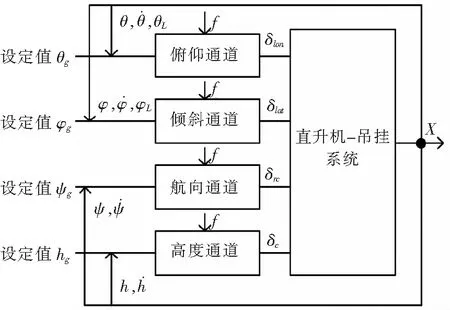
图2 姿态控制框图
2.1 终端滑模自抗扰控制器设计
为了提高直升机吊挂飞行的抗干扰能力,在控制直升机本体姿态的基础上引入吊挂货物的姿态信息,设计自抗扰控制器对直升机吊挂系统所受的扰动进行估计和补偿,提高系统稳定性。同时,为了提高系统响应速度,将终端滑模控制与自抗扰控制器结合,设计终端滑模自抗扰控制器应用于直升机吊挂飞行过程中俯仰通道和倾斜通道的姿态控制。
俯仰通道和倾斜通道控制结构相同;航向通道和高度通道采用PID控制器对航向角和高度进行控制。俯仰通道控制结构如图3所示。
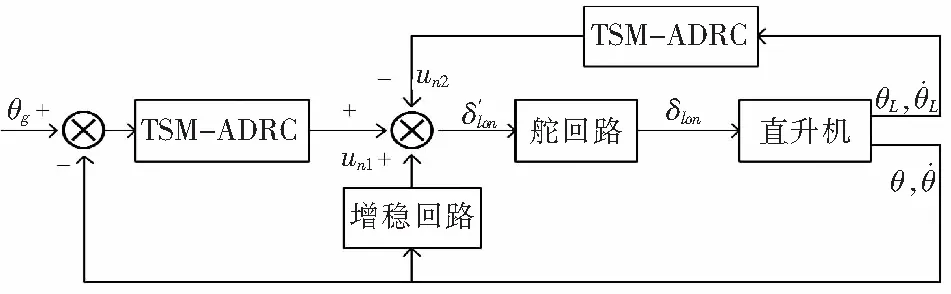
图3 俯仰通道控制结构图
经典的自抗扰控制器(ADRC)由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性状态误差反馈(NLSEF)、扰动估计补偿四部分构成[10]。为了提高系统响应速度,提高控制系统的鲁棒性,将终端滑模控制算法与经典自抗扰控制算法融合。控制器组成如图4所示。
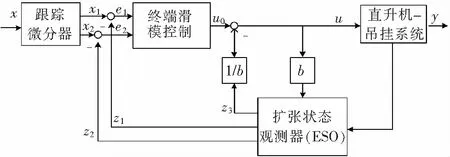
图4 终端滑模自抗扰控制器结构图
跟踪微分器用于跟踪控制器的参考输入及其微分,能够对输入信号进行滤波及软化;扩张状态观测器用于观测系统当前状态并对扰动进行估计,z1和z2为状态观测值,z3为系统扰动估计值。
因此,终端滑模自抗扰控制器为:
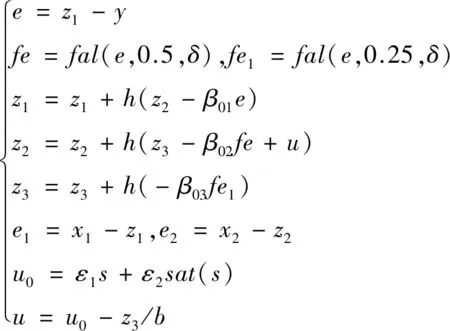
(3)

(4)
式中,α体现函数fal(e,α,δ)的非线性特性,δ是避免控制量产生震颤的微小正数,fal(·)函数类似于自适应的作用,误差较大时采用小增益提高稳定性,误差较小时采用大增益提高快速性。
以俯仰通道为例,图3中终端滑模自抗扰控制器的输出为:
un1=ε11s1+ε21sat(s1)-w1/b
un2=ε12s2+ε22sat(s2)-w2/b
(5)

2.2 仿真与结果分析
为了验证本文控制算法能够有效提高直升机吊挂飞行时的抗扰动能力,分别基于未引入吊挂物摆角信息的PID控制器、引入吊挂物摆角信息的TSM-ADRC控制器和PID控制器在MATLAB/SIMULINK中进行直升机吊挂前飞姿态稳定仿真,并进行对比分析。
仿真中直升机吊挂系统飞行参数为:飞行高度H=3000 m,前飞速度V=111 km/h。直升机吊挂飞行过程中会遇到气流扰动使吊挂货物偏转一定角度,因此假定吊挂货物相对直升机的初始侧摆角和后摆角偏离平衡位置0.1 rad,即直升机吊挂系统的初始状态为X0=[0 0 0 0 0 0 0 0 0 0.1 0.1 0 0]T。
基于未引入吊挂摆角信息的PID控制器的吊挂物摆角变化如图5所示。
根据图5可以看出,在未引入吊挂物摆角信息的情况下基于PID控制器对直升机姿态进行控制,吊挂物的摆角振荡严重,但由于直升机自身的增稳控制律及自动控制的存在,吊挂物摆动角度依然会缓慢收敛。
基于引入吊挂物摆角信息的TSM-ADRC控制器和PID控制器的直升机吊挂前飞三轴姿态稳定仿真结果的直升机三轴姿态变化如图6所示,吊挂物摆角变化如图7所示。
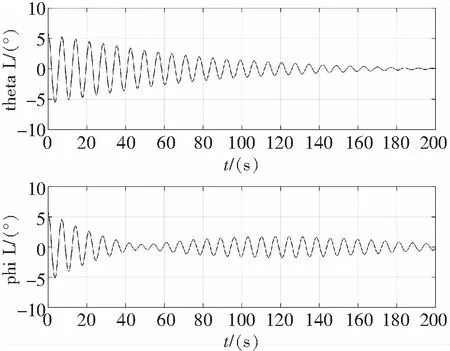
图5 吊挂物摆角变化曲线
根据图6中(a)和(b)的对比可以看出,基于PID控制器的直升机吊挂系统在吊挂货物受到扰动时直升机本体姿态也产生了较大变化,俯仰角变化最大值为2.334°,倾斜角变化最大值为-2.437°;而基于本文设计的终端滑模自抗扰控制器的直升机本体姿态几乎一直在0°附近变化,吊挂货物摆角变化对直升机姿态影响很小。
根据图7与图5对比可以看出,引入吊挂物摆角信息设计的控制器可以使吊挂物快速稳定。根据图7中(a)和(b)的对比可以看出,两种控制器均可以使吊挂物摆动角快速回到平衡位置,基于本文设计的终端滑模自抗扰控制器的吊挂物摆角稳定时间更短。
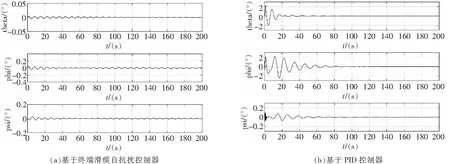
图6 直升机三轴姿态变化曲线
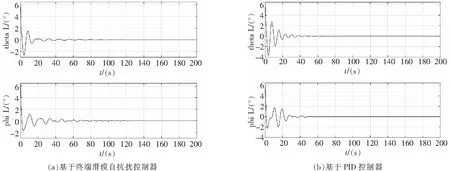
图7 吊挂物摆角变化曲线
3 结束语
本文首先建立了直升机-吊挂系统的模型,然后针对直升机-吊挂系统易受到扰动及吊挂货物摆动对直升机本体具有干扰等问题,设计了终端滑模自抗扰控制器。仿真对比结果表明,吊挂货物由于受到扰动导致的摆角变化对直升机本体有较大影响,本文设计的终端滑模自抗扰控制器可以抑制直升机吊挂前飞过程中吊挂物的摆动,并通过干扰补偿减小吊挂货物对直升机姿态的影响,同时提高系统响应速度。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
选煤技术(2022年2期)2022-06-06
大电机技术(2022年2期)2022-06-05
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
湖北工业大学学报(2021年2期)2021-04-28
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
汽车文摘(2016年11期)2016-12-08