
基于STM32的特种车辆车载智能控制网联魔盒设计
2022-12-30 06:46王姣高捷朱迪徐宇
科技视界 2022年25期
王 姣 高 捷 朱 迪 徐 宇
(1.扬州市职业大学,江苏 扬州 225009;2.扬州核威碟形弹簧制造有限公司,江苏 扬州 225000;3.江苏天河水务设备有限公司,江苏 扬州 225000)
0 引言
随着车联网技术的发展,很多家用车上已经搭载智能网联技术,不断提升用户的用车体验,但是,在特种车辆上,搭载智能网联技术的应用并不多,随着城市化进程的发展,在城市清扫车等特种车辆上对采集汽车关键信息并上传至云端的需求不断提升,一方面可以及时获取特种车辆的相关信息,另一方面根据对应的数据信息可以优化特种车辆的工作,提高其工作效率,因此,本文着重设计搭载在特种车辆上的智能控制网联魔盒。
1 系统整体方案设计
1.1 系统结构
现代车辆使用了大量电子技术,如发动机的ECU 控制、防抱死ABS、自动变速器等,这些电子系统不仅依赖于传感器检测和控制芯片,而且需要一个高速稳定的通信网络将各部分组成一个协调运行的整体,这个通信网络就是依托CAN 总线建立起来的,车辆的状态信息如发动机转速、油耗、里程等信息通过CAN 总线传输,因此,为获取车辆运行状态信息,本项目采用通过OBD 接口监听CAN 总线消息的方法,并结合其他检测控制电路,将采集到的信息通过4G 无线网发送到云端服务器,同时也接收云端的消息,实现数据的交互。系统硬件结构组成如图1 所示。
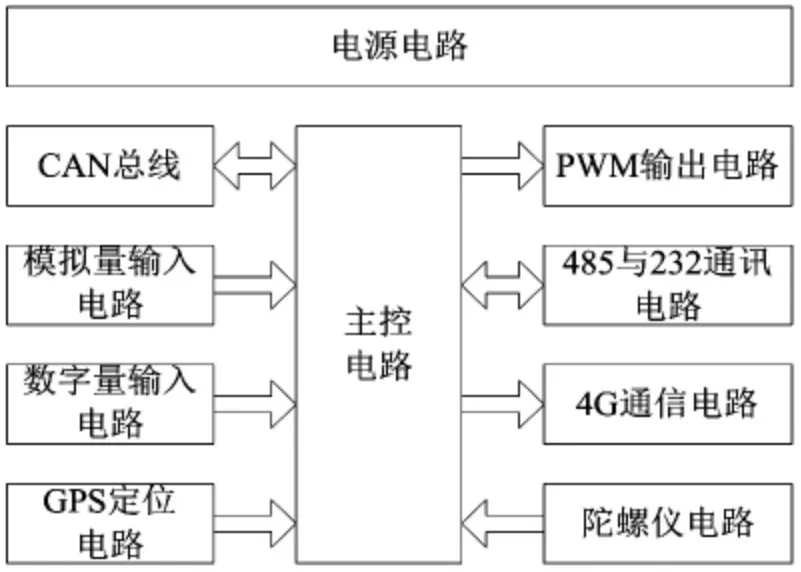
图1 硬件结构组成图
1.2 系统组成
在综合考虑车载网联魔盒对控制系统的要求以及通信技术特点的基础上,本设计的网联魔盒主要包含一个主控电路、电源电路、CAN 总线接口电路、I/O 接口电路、定位与姿态检测电路、4G 无线通信接口电路等。
2 系统硬件设计
2.1 主控电路设计
(1)主芯片采用STM32F407,主频达到168MHZ,带有DSP 和FPU 指令;
(2)通信接口包括6 个USART,3 个SPI,3 个IIC,2 个CAN,1 个SDIO;
(3)2 个12 位DAC,3 个12 位ADC;
(4)17 个16 位和32 位定时器;
(5)1 MB FLASH 和192 KB SRAM,LQFP100 引脚封装;
(6)考虑到断电等特殊情况,在外部扩展了一片8 KB 的MB85RS64 铁电存储器作为数据备份存储器,具有读写速度快、使用寿命长、性能可靠的特点;
(7)程序下载通过两线接口SWD 进行。
2.2 电源电路设计
电源电路采用TPS5430DCDC 降压芯片实现3.8 V 和5 V,具有过流保护和过热保护功能,工作频率达到500 KHZ,内部集成了N 沟道MOS 管,转换效率高,输出电流3 A,续流二极管采用B340A 肖特基二极管,为抑制电路浪涌,采用压敏电压30 V 的MOV 压敏电阻,为防止异常掉电,采用5.5V1F 的超级电容作为后备电池,系统将数据存储到芯片中,保证数据的可靠性。
2.3 CAN 总线接口电路设计
由于主控芯片STM32F407 内部已集成了CAN 控制器,所以外部只需连接CAN 收发器ISO1050 即可,这是一种适用于车辆的隔离型CAN 通信的芯片,工作温度-55~105℃,其具有串线、过压和接地损耗保护以及过热关断功能,通信速率1Mbps,抗干扰能力强,可靠性高。STM32 内部CAN 控制器支持CAN2.0A 和CAN2.0B,具有3 个发送邮箱,发送优先级可配置,两个具有三级深度的FIFO,以及28 个ID 标识符筛选器组,完全以硬件方式支持11 位和29 位ID 标识符。电路图如图2 所示。
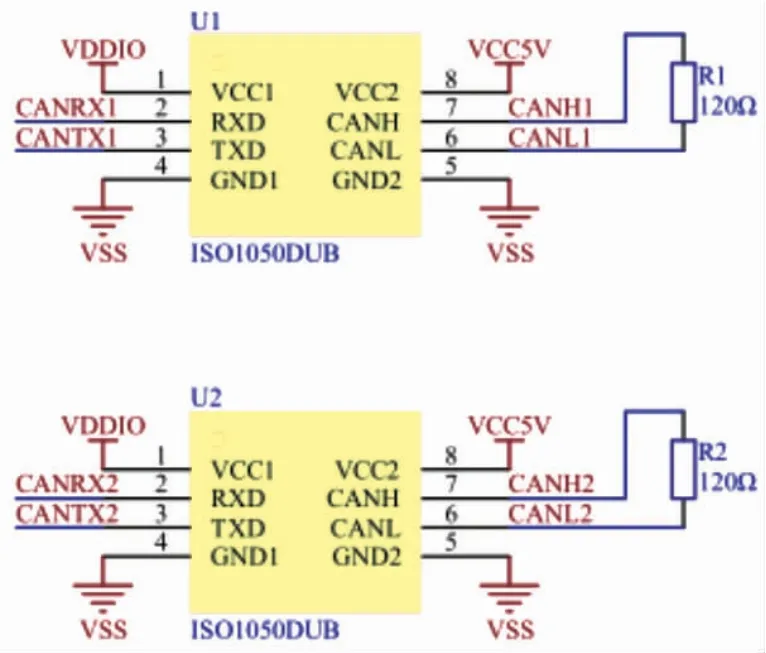
图2 CAN 接口设计
2.4 4G 通信接口设计
4G 通信因具有速度快、性价比好的特点获得广泛的应用,支持多种通信协议如TCP、UDP 等,具备多模多频段工作的能力,为方便用户和应用系统集成,有的厂商提供了UART 接口,用户可以使用应用系统的MCU 与模块连接,实现数据的收发,这样既可以采用HTTP 协议,也可以采用物联网常用的MQTT/COAP 等协议,甚至可以自行定义相关的协议,可以适应用户不同场景下应用的需求。一个4G 通信模块一般具有以下功能:
(1)HTTP 模式、SMS 短信功能,以及其他的协议功能;
(2)心跳包、注册包机制,套接字分发;
(3)多路Socket;
(4)AT 指令集。
供应用系统MCU 调用本设计4G 模块为WH-G405TF,工作电压3.8 V,采用UART 口和MCU 通信,可设置成透传模式,非常方便接入云端,具体设计如图3 所示。采用时间触发或长度触发机制发送数据包,即间隔时间超过某个值(默认50 ms)或数据长度超过某值(默认1024)时模块自动将数据发送至指定的服务器,其初始化过程如下(AT 指令):
(1)设置工作模式为透传:AT+WKMODE=NET;
(2)使能SOCKETA:AT+SOCKAEN=ON;
(3)设置TCP 协议和远程服务器地址与端口:AT+SOCKETA=TCP,WWW.USR.COM,2317;
(4)设置SOCKETA 为长链接:AT+SOCKASL=LONG;
(5)重启模块:AT+Z。
模块设置好以后,只要串口打入数据包,间隔超过50 ms,模块就将数据转发出去。
帧头(2 字节)+帧长度(2 字节)+功能字符(4 字节)+数据单元(N 字节)+CRC 校验(2 字节)+帧尾(2 字节)。
主控芯片初始化串口后,将数据按指定格式发给模块,波特率为115 200bps,8 位数据,无校验位,启停各1位,初始化程序如下:
2.5 其他接口
为了获取车辆的位置和姿态等信息,网联魔盒还集成了GPS 模块和6 轴加速度传感器MPU6050,此外还包括模拟数字量接口,RS485 和232 通信接口,便于和其他车载设备交互,如上装各类仪表等。由于STM32 具备较强性能,魔盒还可以充当某些设备的控制器作用、清障扫雪设备的控制、路况的检测报警等,同时由于和远程服务器连接,既可以发送车辆信息,也可以接受后台信息,如任务管理、行车路线安排等。具体如图4 所示。
3 系统软件设计
3.1 总体软件结构
3.2 CAN 总线与车载J1939 协议
CAN 总线是一种实时高速、抗干扰强、性价比高的通信技术,广泛应用于工业控制、车辆船舶控制等方面,通信速度达到1Mbps 甚至更高,CAN 总线的特点是废除了站点地址,而是采用11 位或29 位(CAN2.0B)的ID标识符来构成数据帧,提高了应用的灵活性,同时采用硬件优先级仲裁机制,进一步提高了网络通信的实时性,这对于安全性要求高的应用特别有意义,也是不同于RS485 等通信总线的一个重要特点。CAN 总线定义了如下5 中数据帧:
(1)数据帧,用于收发双方传输数据。
(2)远程帧,向指定ID 标识符的站点请求数据的帧。
(3)错误帧,当检测到错误时,向总线发出的帧。
(4)过载帧,当接收站点未准备好接收数据时发出的帧。
(5)帧间隔,用于数据帧或远程帧和前帧分开的帧。
J1939 是一种在卡车和客车中应用的系统应用层协议,它详细定义了车辆运行时的各种消息规范,更新时间,各种参数定义,具体的参数包括以下几种:
(1)控制参数,包括发动机转速、加速减速踏板位置、发动机转矩等。
(2)驱动系统状态参数,如发动机和减速器的转矩模式、加减速状态、ABS 状态等。
(3)驱动系统控制参数,如换挡请求、关闭传动系统动力请求、ABS 开关请求等。
(4)动力系统状态设置参数,如发动机状态设置、传动系统状态设置、减速器状态设置等。
(5)消息参数,如驱动轴温度、进气歧管温度、离合器压力、制动压力、里程、发动机运行时间等。
(6)消息状态参数,如刹车开关、离合器开关、换挡开关、制冷系统开关等。
J1939 协议是标准协议得到了很多厂商的支持,国内的东风和重汽底盘均支持该协议,有些还开发了专用的车载OBD 接口,方便了车辆故障诊断和维护。
CAN 总线软件设计是本项目设计的重要内容之一,CAN 初始化过程和数据传输流程如下:
(1)CAN 初始化,250 kbps,允许CAN 中断。
(2)配置过滤器,由于J1939 协议采用29 位ID 标识符,所以STM32 的CAN 过滤器配置为32 位模式,因为要获取的J1939 信息较多,且ID 码差异性较大,为提高效率,使用了两个过滤器来获取CAN 总线的信息,下面给出流程如图6 所示。过滤器1 的设置方法和过滤器0 相同,这样CAN 总线的消息经过滤器筛选器后进入FIFO 缓冲区,向系统申请中断。
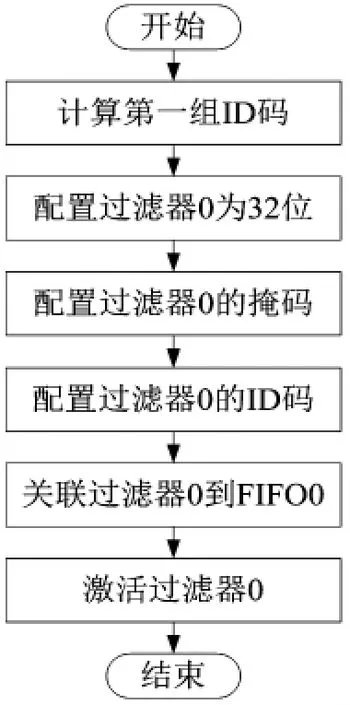
图6 CAN 控制器过滤器设置流程
(3)中断处理及数据解析。
为保证数据接收的可靠性和实时性,防止数据解析发生错误,采用了双缓冲区方法,即当中断数据填入缓冲区0 时,数据解析程序只能解析缓冲区1 的数据,获得对应的车辆信息;反之,则解析缓冲区0 的数据,解析好的数据打包通过4G 模块发送到远程服务器,同时切换缓冲区。
解析程序根据J1939 协议的定义,将ID 码对应数据提取出来,打包进4G 模块的发送缓冲区即可,根据重汽车型提供了10 个ID 码的对应关系,如表1 所示。
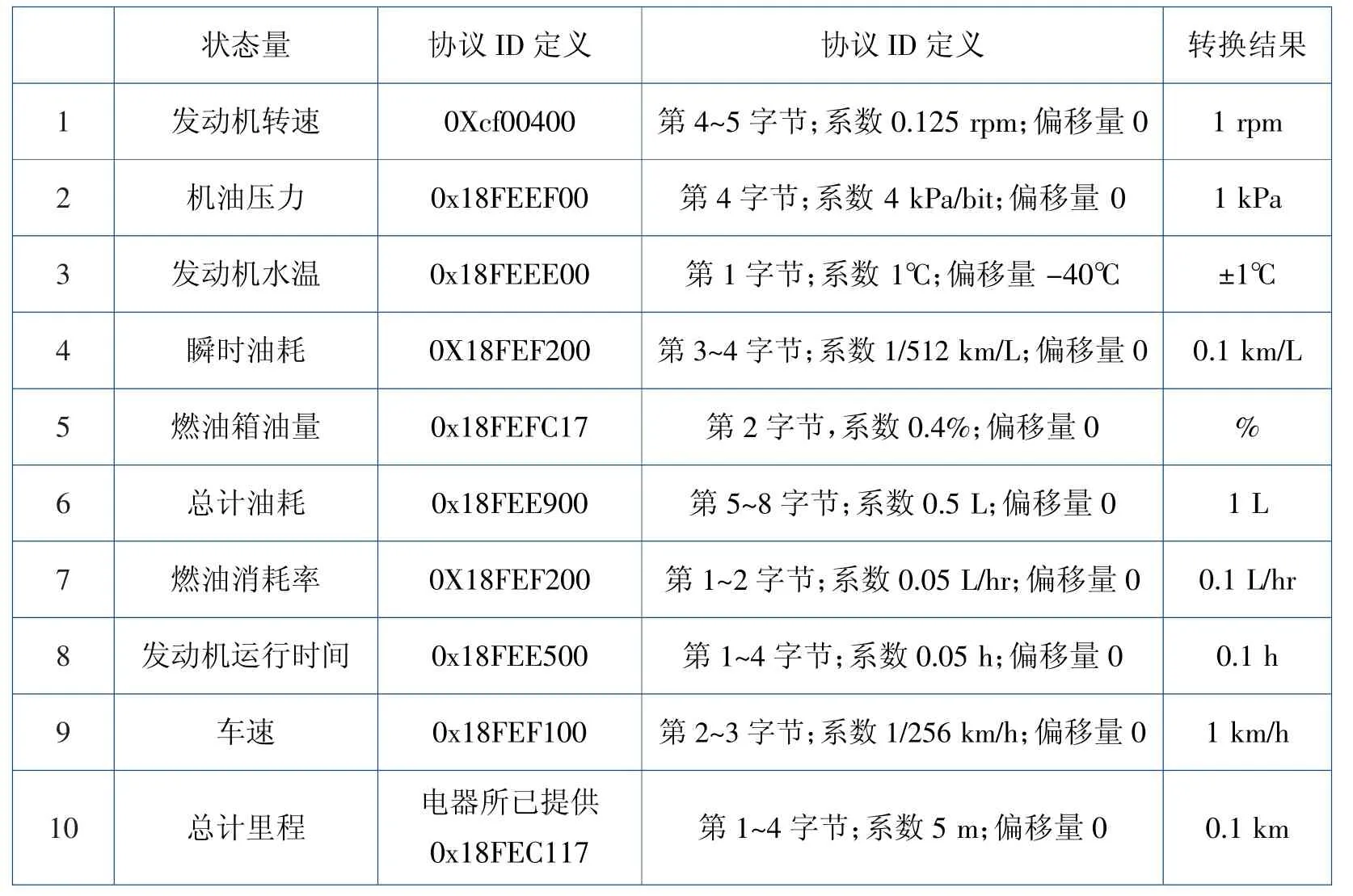
表1 重汽底盘信息采集内容
4 实验测量与结果分析
魔盒测试是通过CAN_H 和CAN_L 总线进行数据采集,一般重型车辆采用的是250 kbps,把魔盒上的CAN_H 和CAN_L 两根数据线分别插入被测试车辆的OBD 诊断接口的相应位置,通电后就可以测试。
5 结语
由于油量信息变化缓慢,难以实时观测,采用多车多次联机测试,以及通过切断油量传感器数据线两种方法,确定云端接收到的油量信息与车况相一致,说明本项目设计的网联魔盒符合预期要求,随着智能网联控制魔盒在特种车辆上的不断应用,必定可以推进特种车辆网联化的发展,促进整个行业的不断进步,给环卫等行业带来新的机遇。
猜你喜欢
哈哈画报(2022年1期)2022-04-19
内燃机与配件(2022年2期)2022-01-17
高技术通讯(2021年3期)2021-06-09
小学生作文(低年级适用)(2018年4期)2018-05-14
童话世界(2018年13期)2018-05-10
东南大学学报(自然科学版)(2018年1期)2018-02-08
水利规划与设计(2017年11期)2017-12-23
数学小灵通·3-4年级(2017年5期)2017-06-05
中国公共安全(2017年9期)2017-02-06
项目管理技术(2015年3期)2015-04-23
