一种高精度超声波定位系统设计与实现
2023-01-08 16:49孙啸辰王韦刚许晨东张晨冒雨龙
电子设计工程 2023年1期
孙啸辰,王韦刚,许晨东,张晨,冒雨龙
(南京邮电大学,江苏南京 210023)
目前在室内定位领域,有多种定位技术和方案。UWB(Ultra Wide Band,超宽带)定位精度高,但是成本高昂,难以普及[1]。WIFI 定位需要在定位前建立起RSS(Received Signal Strength,接收信号强度)和室内位置的对应关系,前期测试工程量巨大[2];蓝牙定位易受到周围环境中同频段的干扰,定位不稳定[3];红外线定位易受到室内光线影响,定位精度低[4];超声波测距作为一种非接触式检测技术,得到了越来越广泛的应用[5],其结构简单、测距精度高、成本低、稳定性好,广泛应用于液位测量、车辆防碰、室内定位、移动机器人自主避障等方面[6]。然而,在超声波定位过程中,存在只能在特定方向上测距的问题[7-8],并且反射式超声波系统只能用于测距。针对上述问题,文中设计了一种基于对射式测距和反射锥的定位系统,可以实现高精度、实时的目标定位。
1 系统整体设计
STM32 单片机具有高性能、低成本和低功耗的优点[9],文中在超声波发射端与超声波接收端都选用该单片机作为微控制器单元,负责控制HC-SR04 模块发射和接收超声波、测距计时、WIFI 模块与上位机通信。由于HC-SR04 模块的发射探头发出的超声波角度不能满足对射式测距的需求,因此设计的超声波定位系统在发射探头上安装一个金属锥,用于扩大超声波辐射角度。另外,超声波发射接收装置要实现严格的时间同步[10],因为WIFI 通信协议复杂,存在延时,不能实现实时同步,因此文中巧妙地应用了红外同步电路,以实现时间同步。超声波的传播速度会受到温度的影响,文中基于DS18B20 温度传感器设计了温度补偿电路。另外,文中还采用了ESP-01SWIFI 模块,用于将测距数据实时地上传到上位机。超声波定位系统组成如图1 所示。

图1 超声波定位系统整体设计
该超声波定位系统实现了定位目标可视化显示,具有定位精度高、实时性强的优点。
2 硬件设计
2.1 基于反射锥的超声波模块设计
HC-SR04 超声波模块发射探头的发射角度在30°以内,因此,对射测距范围受到限制。但是超声波具有方向性好的特点,能够在金属表面上产生反射、折射[11],于是考虑用一个金属锥作为反射面来改变超声波的传播路径。文中将反射锥固定在超声波发射探头上,超声波经过反射锥反射后被扩散成一个近似水平的环形波束,实现了水平方向360°全部覆盖。该环形波束的垂直方向角度与反射锥顶角角度有关,经过实验验证,文中采用顶角为60°的反射锥。该设计的反射锥有效地扩大了超声波的收发角度。
2.2 超声波发射与接收电路
超声波发射电路使用HC-SR04 模块。超声波接收电路的发射探头被拆下来,确保该模块的接收端探头不被自己发射的超声波干扰。
2.3 红外同步电路
考虑到超声波发射端发射超声波和接收端接收超声波必须控制在同一时刻[12],因此必须应用同步电路。为了确保红外接收管在任意角度都能接收到红外线,文中巧妙地设计了一种红外同步电路,实现了红外线360°全覆盖。
2.4 温度补偿电路
超声波在固体中传播速度最快,在气体中传播速度最慢,而且声速c与温度有关[13]。如果环境温度变化显著,则必须考虑温度补偿问题。空气中声速与温度的关系可以表示为:

式中,T为环境温度,单位℃;c为超声波传播速度,单位m/s。
为了校准超声波在空气中的传播速度,提高测距精度,文中在超声波发射端配置了DS18B20 温度传感器,其优点是电路连接简单、精度高、体积小、功耗低[14-15]。根据该传感器测量的温度值,结合式(1)完成超声波传播速度的校准。
3 软件设计
3.1 定位流程
超声波定位系统软件定位流程如图2 所示。
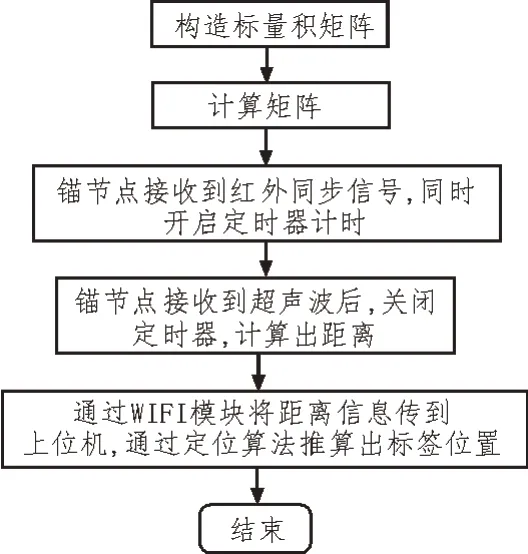
图2 超声波定位系统软件定位流程
3.2 改进的加权多维标度定位算法


基于式(6)和(7)可以构建估计辐射源位置向量u的优化准则,如下所示:

4 实验及结果分析
4.1 测距实验
超声波定位系统的性能主要取决于距离测量的准确性,由于受超声波传播距离的限制,根据文献[15]的实验场景设置,文中在5 m×5 m 的定位区域内进行测距实验。分别在加入温度补偿电路前和加入温度补偿电路后,选取20 个观测点,每个观测点记录100 个测距数据,并取全部数据的平均值。
4.2 定位实验
将超声波发射器安装在待定位目标上,将超声波接收器固定在三脚架上,确保超声波收发器处在同一水平面上。通过WIFI 无线模块将测距信息上传给上位机[17],经过改进的加权多维标度定位算法解算此时标签节点的坐标,在上位机显示标签节点的实时位置。
4.3 实验结果分析
为了验证设计的温度补偿电路的有效性,将文中测距结果与文献[7](JH-Chan 定位算法)、文献[8](SR-Chan 定位算法)进行对比,结果如图3 所示。

图3 测距误差对比
从图3 可以看出,在目标节点与原点之间的距离为4 m 时,文中设计的温度补偿电路的测距误差为1.2 cm,比JH-Chan小0.2 cm,比SR-Chan小0.4 cm,由此说明文中设计的温度补偿电路测距误差小,精度更高。
为了评估文中提出的改进加权多维标度定位算法的效果,与加权多维标度定位算法进行定位误差比较,结果如图4 所示。

图4 不同定位算法误差对比
从图4 中看出,随着定位距离的增大,三种算法的定位误差曲线都呈上升趋势,其中加入温补后的改进加权多维标度定位算法的误差曲线上升最缓慢,并且在不同观测点的定位误差在三种算法中都最小。在目标节点与原点之间的距离为5 m 时,未温补的改进加权多维标度定位算法将定位精度提高了26%,加入温补的改进加权多维标度定位算法将定位精度提高了38%。可以得出,文中提出的加入温补的改进加权多维标度定位算法的定位效果更好,精度更高。
为了更加直观地分析文中设计的温度补偿电路的有效性,仿真得到温补前和温补后定位的误差CDF(Cumulative Distribution Function,累积分布函数)曲线,如图5 所示。

图5 定位累积误差分布曲线
从图5 中看出,累积分布函数值随误差容许度增加而变大,温度补偿前定位误差在5 cm 以内的点约占40%,定位误差在4 cm 以内的点约占20%。经过温度补偿后,定位误差在5 cm 以内的点约占90%,定位误差在4 cm 以内的点约占50%。通过对比加入温度补偿电路前后的定位结果可以得出,文中设计的温度补偿电路有助于提高定位精度。
为了更好地测试文中提出定位算法的效果,将其与JH-Chan 定位算法和SR-Chan 定位算法进行对比,对比结果如图6 所示。

图6 定位误差对比
从图6 可以看出,SR-Chan 定位算法的定位误差明显低于JH-Chan 定位算法,但是,文中提出的RCMS 算法的定位误差小于SR-Chan 算法,定位误差在5 cm 以内。在目标节点与原点之间的距离为5 m时,SR-Chan 定位算法的定位误差比JH-Chan 定位算法低35%,RCMS 定位算法的定位误差比JH-Chan定位算法低43%。可以得出文中提出的RCMS 定位算法比同类算法定位准确。
5 结束语
文中设计了反射锥结构,将超声波收发角度从30°扩大到180°;提出了基于DS18B20 温度传感器的温度补偿方案,将定位精度提高了38%;提出了改进的加权多维标度定位算法,在超声波有效范围内,将定位误差减小了4 cm。实验结果表明,文中设计的超声波定位系统定位精度为5 cm,具有较好的推广意义。
猜你喜欢
四川大学学报(自然科学版)(2020年3期)2020-06-03
中国建材科技(2020年6期)2020-03-23
科学(2020年3期)2020-01-06
计算机应用与软件(2018年12期)2018-12-13
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
科技经济市场(2017年5期)2017-09-16
电子制作(2017年7期)2017-06-05
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17