带式输送机托辊运行状态自动巡检系统的研究
2023-01-26 10:11李建芳
机械管理开发 2022年11期
李建芳
(晋能控股装备制造集团金鼎山西煤机有限责任公司皮带机制造分公司,山西 晋城 048000)
引言
带式输送机是煤矿物料输送的核心,其运行的稳定性和可靠性直接决定了井下物料运输的效率和经济性。输送机在运行过程中输送带置于托辊组上,由托辊组对输送带的运行进行校正和支撑,而且托辊组的数量极大,一旦出现故障后极易导致输送带的跑偏、磨损加剧甚至起火,严重影响了煤矿物料运输的可靠性。目前多数煤矿均采用人工巡检的模式,对输送机各托辊的运行状态进行监测,但由于托辊数量大,人工巡检不仅效率极低而且受输送带运输环境的影响,人工检出故障的概率低,也无法及时发现隐含的故障,因此难以保证输送机运行的稳定性。
本文提出了一种新的带式输送机托辊运行状态自动巡检系统,该系统用巡检机器人替代人工沿着输送机进行巡查,巡检机器人通过红外图像处理技术实现对托辊运行情况的动态监测,然后将监测数据通过无线传输的方式传递给控制中心,实现对托辊故障的准确识别和定位。根据实际应用表明,新的自动巡检系统对托辊故障的识别率高达96.1%,对提升输送机的运行稳定性和可靠性具有十分重要的意义。
1 自动巡检系统架构
由于输送机的输送距离远、地质条件较为复杂,对数据传输稳定性和及时性的要求极高,虽然有线传输的方案抗干扰能力强,但其应用灵活性差,在使用过程中极易出现电缆被缠绕等,因此经过对多种数据传输方案分析后,确定了采用无线传输的模式,整个自动巡检系统的架构如图1 所示[1]。
由图1 可知,该巡检系统采用了集成控制模式,将矿井上所有输送机进行智能化巡检,在系统内设置了多个无线通信分站,根据实际分布情况,每5 个通信分站的数据信息汇总到一个通信基站内,满足数据传输安全性和可靠性的需求。监测信息在通信基站内进行转换后传输到调度室服务器内对数据进行分析,判断各个监测数据是否正常,对异常数据进行标定和定位,然后将分析结果传输到上位机控制终端,实现对输送机托辊运行状态的远程自动巡查监测。
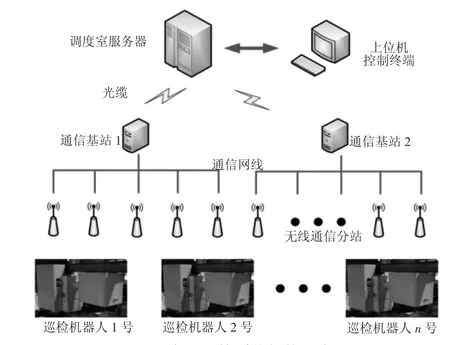
图1 自动巡检系统架构示意图
2 巡检机器人设计方案
巡检机器人是该巡检系统的核心,为了满足沿输送机智能化巡检的需求,该输送机巡检机器人可分为巡检机器人本体和上位机运算控制系统两个部分。巡检机器人本体主要包括机体设备、控制系统、环境监测传感器及数据通信系统,用于保障巡检机器人沿轨道的正常运行、数据采集及数据传输,该巡检机器人的整体结构如下页图2 所示[2]。
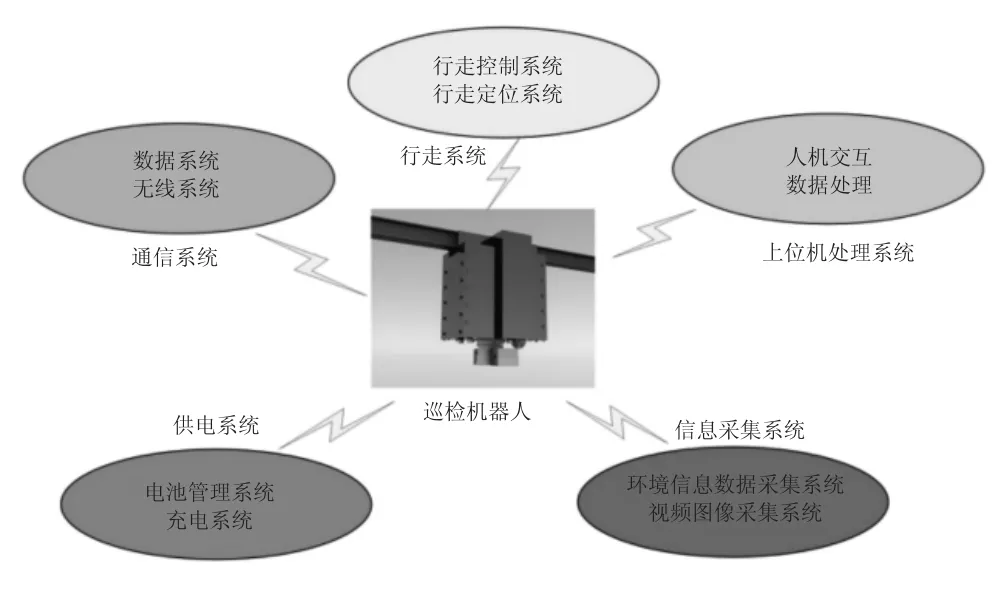
图2 巡检机器人结构示意图
行走控制及定位系统主要用于控制巡检机器人在巡检轨道上的运行及准确定位。
供电系统主要是指巡检机器人自身的储能系统及巡检路径上的充电系统,机器人自身的储能系统主要用于给机器人的行走机构供电,保证行走机构的正常驱动,同时还用于为各类监测设备提供稳定的电能,保证各监测设备的运行可靠性和连续性,巡检路径上的充电系统主要用于为机器人提供紧急充电支持,保证巡检机器人在巡查过程中的工作连续性。
通信系统,包括数据系统和无线系统两个部分,数据系统用于存储各个传感器的数字量监测信号,并对各监测信号进行滤波处理,保证进一步数据分析的准确性。无线系统用于将监测的数据信息和视频信息传递到上位机上,保证机器人在巡查过程中数据传输的可靠性和连续性。
信息采集系统,信息采集系统是该巡检系统的核心,采集系统上布置有粉尘浓度传感器、温湿度传感器等,用于对输送机周围的环境情况进行监测,同时在系统内还集成由红外线视频监测系统,通过可见光视频监控和红外热成像监测实现对托辊运行状态的判断。
上位机处理系统,该系统是整个巡检系统的“大脑”,主要用于对所监测到的数据信息进行分析处理,对故障位置和状态进行判断、报警。
3 输送机自动巡检控制逻辑
为了满足自动巡检机器人的智能控制需求,本文提出了一种新的输送机自动巡检控制逻辑,其整体控制流程如图3 所示[3]。
由图3 可知,该巡检系统包括自动巡检控制模式和人工操作巡检模式。在人工操作巡检模式下,操作人员控制巡检机器人行走到指定位置,然后针对性地对异常点信息进行收集和故障监测,当监测出异常后系统自动进行报警,然后由专业维修人员处理后消除报警,最后控制巡检机器人回到起始点。

图3 智能巡检控制逻辑
当在自动巡检控制模式下,则按照预先设定的巡检逻辑,使巡检机器人按规定的巡检路线、速度、监测角度等进行巡检,在巡检过程中若发现故障,则系统根据巡检机器人自身的行走定位系统确定故障位置,然后进行故障现象、故障原因分析的标定和故障信息上传,由专业的维修人员进行维护后进行报完工。同时在巡检过程中系统自动对电量情况进行监测,若系统判定无法完成巡检则将控制巡检机器人到最近的充电位置进行电量补充。
4 托辊故障监测方案
该巡检系统的核心是对托辊故障和周围环境温度进行监测,对周围环境温度监测统各类传感器即可满足监测精度和可靠性的需求,但由于托辊布置位置和实际工作状态不一,因此传统监测方案效率低、可靠性差。
因此项目组首先对托辊常见的故障进行分析,发现托辊常见的故障主要是安装偏位、轴承故障、托辊变形等,这些故障的一个通用性的表现是会引起和输送带接触位置的摩擦加剧,在经过多次试验验证后,最终采用了可见光视频监测和红外线热成像监测共同结合的方案,其故障判别理论如图4 所示[4]。

图4 红外线故障监测原理
由图4 可知,红外线故障监测主要包括两个部分,首先通过红外线光学镜头和光栅将探测物体的红外热辐射信号转换为电压信号,然后再通过图像处理芯片,将物体的红外辐射信号转换为数字式的视频图像信号,根据不同的红外热辐射信号即可对各滚筒的运行状态进行有效判断。
5 应用效果分析
该托辊运行状态自动巡检系统应用以来,对其工作稳定性进行了跟踪监测,该巡检机器人的电能供应能满足自动巡检1.5 个来回的需求,数据传输系统能够保证在巡检机器人运行过程中数据信号传输的稳定性,未出现过因数据传输稳定性不足而导致的监测系统故障。对近3 个月输送机的故障情况进行统计,共出现故障76 次,其中监测系统提前识别报警的故障为73 次,监测有效率达到了96.1%,极大地提升了输送机运行的稳定性和可靠性。
6 结论
1)输送机巡检机器人可分为巡检机器人本体和上位机运算控制系统两个部分,能够保障巡检机器人沿轨道的正常运行、数据采集及数据传输;
2)巡检系统包括自动巡检控制模式和人工操作巡检模式,能够满足不同情况下巡检灵活性的需求;
3)可见光视频监测和红外线热成像监测共同结合的方案能够有效的对托辊的运行状态进行判断;
4)新的自动巡检系统对托辊故障的识别率高达96.1%,有效地提升了输送机运行的稳定性和可靠性。
猜你喜欢
起重运输机械(2022年2期)2022-03-04
设备管理与维修(2021年21期)2021-12-29
起重运输机械(2021年23期)2021-12-21
中国设备工程(2020年15期)2020-07-29
中国煤炭工业(2019年3期)2019-08-27
建材发展导向(2019年11期)2019-08-24
铜业工程(2018年6期)2019-01-07
中国设备工程(2018年2期)2018-03-02
山东工业技术(2016年15期)2016-12-01
同煤科技(2015年2期)2015-02-28