
基于多能物联的水电站智能巡检机器人研究
2023-02-13 06:32金大刚毛青海陈自强张福兴熊杰
电器工业 2023年1期
金大刚 毛青海 陈自强 张福兴 熊杰
(1.陕西省水电开发有限责任公司二郎坝发电公司2. 深圳市精实机电科技有限公司 3.华自科技股份有限公司)
0 引言
水电站是清洁能源供给的有效形式之一。随着信息网络与通信技术、装备的发展与应用,原有的水电站监测与巡检装置越来越不适应现代化水电站的运维要求。尤其在中小型无人值班、少人值守的日常巡检中,传统的人工巡检方式正逐步被淘汰,取而代之的是更加智能、全面、精准可控的固定式或移动式巡检机器人。相比于人工巡检,智能机器人在水电站巡检的过程中具有智能化水平高、便于集约化管理以及经济高效等优点。目前国内外学者对巡检机器人进行了大量理论研究与产业探索,总结起来主要包括如下几个方面:①巡检机器人的分类,主要面向电站电厂巡检、输配电线路巡检、变电站巡检、用电终端服务巡检机器人;②巡检机器人工作原理与应用功能方面,主要研究内容包括自主导航、表计读数、红外测温、视频监视、智能分析、异常预警等方面;③巡检机器人关键技术方面,重点包括视觉大数据分析技术、视觉识别与智能交互技术、基于AR/VR的多目标识别技术、图像及语音识别技术、自主导航与精准控制技术、人工智能与云计算技术、物联网技术、虚拟现实技术等;④在电力巡检机器人指标先进性方面,重点围绕可接入传感器数量、传输速率峰值、平均功耗情况、缺陷图像的识别率;⑤在巡检机器人应用发展新方向上,重点围绕巡检机器人与传感器协同、机器人与高清视频协同、机器人与智能故障诊断系统协同、平台为核心的智能生态、多元数据融合、智能辅助决策。然而,现有的水电站机器人巡检的智能化水平,尤其是多台智能巡检机器人组网后的平台化、集约化管理方面还有很多的问题值得研究。为了提高水电站巡检机器人的巡检效率与效益,本文研究并提出了基于多能物联技术的智能巡检机器人,并结合实际应用情况进行案例分析。
1 基本概念
1.1 巡检机器人
巡检机器人是指广泛应用于工业、电力、工控、环保、智能运维等领域,具有精准定位、路线规划、智能避障、自主或成组作业等功能,实现终端表计数据识别、信息归类与上传、巡检作业管理以及智能故障诊断的固定式或移动式机器人,能够部分或全面代替人工实现场站的无人值守。在功能方面,巡检机器人具有导航定位、无轨运行、数据抄读、智能测温、远程可控、故障识别、异常预警、联动告警、自动充电等功能。
1.2 多能物联
多能物联指面向能源生产与能源消费的能源多元化需求,基于能量转换、能量存储、能量调控等设备设施,利用物联网、大数据、人工智能等信息技术,实现能量与信息流深度融合,多种能源的协同互补、安全高效和智能管控,具备能源设备状态全面感知、能量流动系统监测、能源效率综合提升、能源安全有效保障等能力,支持能源产业面向多能、绿能、节能、智能的方向持续发展。其中,多能是指多种类能源、多品质能源、多能源形式;物联是指基于能源设备的能量互连、基于信息技术的信息互联、基于信息物理的深度耦合。多能物联平台是面向包括水电站智能巡检等多应用场景的一体化平台,优势在于实现终端设备即插即用、需则可用,以及系统层态势感知、理解与利导。
2 基于多能物联的水电站管控平台
2.1 基于多能物联的水电站平台架构
基于多能物联的水电站采用“三层两网”的结构进行设计。其中,三层就是厂站层、单元层、过程层,两网即为“厂站层网”和“过程层网”,据此对场站进行分层分区管理。
“过程层网”将水电站的各种设备信息上传到单元层,然后从单元层接收厂站层下达的控制命令。
“厂站层网”按双星型网络架构设计。其中安全I区是最重要的生产控制区,并按“三层二网”的结构设计。安全I区是指直接用于生产的设备区,主要包括水电站的控制设备、发电、供电、调度等设备区。安全II区是非生产控制区,主要提供有关的控制参数,如电度计量、发电计划、保护定值管理、故障录波、设备运行状态监测、洪水预报、中长期水文预报等设备区。安全III区是信息管理区,主要管理大坝监测、视频图像显示、设备状态检修、消防系统管理、智能生产管理、行政办公管理、Web发布等等功能区。为了网络的安全可靠,要求安全I区与安全II区之间用防火墙隔离,安全II区与安全III区之间用横向隔离装置(含正向隔离装置与反向隔离装置)隔离。所有安全区的运行软件,均在一体化管控平台上运行。
2.2 基于多能物联的水电站平台功能
(1)梯级调度的联合控制
水电站梯级调度系统应达到合理调度用水、防洪、灌溉、发电等目的。为完成最优的梯级调度,需要开展水电站流域的水情水文预报,以便合理安排水电站的发电计划,提高水量和水头的利用效率,应根据具体情况制定梯级调度的计划,并根据情况的变化及时修改调度计划。
(2)现地与远程控制的联合控制
由于整个系统采用开放式、分层、分布式的网络系统,故而具有多级调控的能力,既能在现地对设备进行控制,也能在分调度或总调度等处进行控制,极大地方便用户根据具体情况选择控制模式。
(3)数据的采集与交换
实时采集各控制点的数据,根据采集的数据和规定的策略进行控制、操作、报警等工作,格式化处理后,存入实时数据库。数据库的实时数据可供查询、远传、交换等处理。
(4)数字化视频监控
用最先进的数字化视频监控技术,实现视频信号的数字化通讯,为调度系统、水电站各系统提高安全防范措施,增强对突发事件的快速反应能力,因而使得远程监控系统的管理与维护变得更加容易。
(5)梯级水电站的群控与自动安全监测
对整个梯级的各级水电站实现集中控制,通过各种自动化监控技术及分析技术,达到水的利用率与水电站出力的最佳配合。并且预警水电站设备和水工建筑物的运行状态,保障梯级水电站的安全运行。
(6)远程Web浏览系统
Web浏览系统作为B/S构架的监控信息发布平台,采用XML技术对信息进行分类分层管理。任何一个水电站只要接上Internet网(需加华自网关),可以实现在任何一台计算机终端上,通过上网的方式访问服务器站点,可以实现查询水电站的主接线图、实时数据、开停机流程、各种报表、曲线、历史数据等功能,方便各级人员对整个水电站系统进行及时的、全面的了解。
(7)设备的远程控制和调节
实现多个分控中心的远程联合水量调度、电量调度,实现总水量的平衡调度,保证整个系统安全稳定运行。
3 基于多能物联的智能机器人巡检系统
3.1 智能机器人巡检平台
基于多能物联的智能机器人巡检平台负责整个水电站的数据全面监视、远程运行控制、智能巡检消缺等作用,见图1。对于已建非智能水电站,利用多能物联通讯终端提升信息接入率,利用多能物联协调控制终端提升对关键应用流程以及区域应用的本地智能化水平,利用多能物联储能系统提升水电站用能的效率与效益,利用多能物联平台实现与原有平台的融合或对原有平台进行升级改造,据此提升平台的智能监管与运维能力。
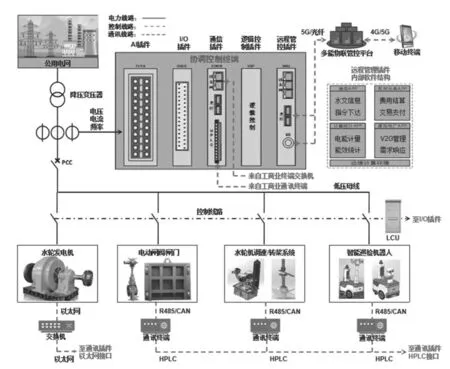
图1 基于多能物联的智能机器人巡检系统应用场景示意图
智能机器人巡检平台运行过程中,智能巡检机器人作为终端信息采集设备,对水电中的变压器、开关设备(断路器、隔离开关)、线路保护信息等进行采集与细分,形成可用于多能物联平台支配的可调配资源。利用多能物联协调控制终端实现对接入信息的就近协调、就地控制,比如基于智能巡检机器人采集标记数据,对于数据越限的水电站终端设备进行告警、隔离,避免事故扩大。
3.2 智能机器人结构组成
智能巡检机器人包括机器人外部、机器人内部、机器人组网系统三个部分,见图2。其中:① 机器人外部包括机器人移动底盘、机械臂、可见光摄像仪、红外摄像仪、拾音器、充电桩、监控软件,可根据用户要求搭载其他传感器,如:异常气体检测、温/湿度监测、油/水渗漏识别、局放检测。②机器人内部包括控制装置、电源、WiFi/5G/4G网络等。通过机器人内外部的互联以及与多能物联平台的实时通信,能够提高巡检质量以及设备巡视数据分析的效率与准确性。数据分析由巡检系统软件自动统计分析,并进行故障诊断,与电站综合自动化系统联动,为电站安全运行保驾护航。③机器人组网系统,通过巡检机器人终端与多能物联平台协作,实现平台与终端的组网协同运行,并支持自动巡检模式与遥控巡检模式。其中,在自动巡检模式下,智能巡检机器人按照预制的巡检内容、行进路径对特定设备开展常规巡检,经巡检机器人获得的设备信息(如表计数据、电压电流、异常告警等)采集后自动上传到多能物联平台,进行数据存储、分析及可视化展示。在遥控巡检模式下,巡检工作人员按照高优先级远程实现对巡检机器人巡检内容的控制,该模式下能够实现对重点设备、重要信息的查看与核实。
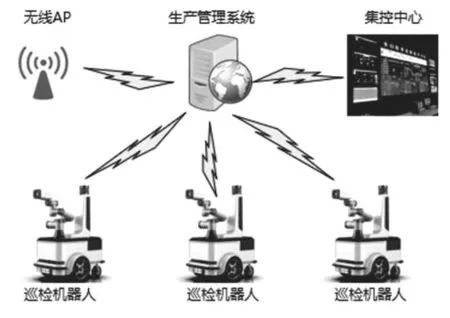
图2 基于多能物联的智能巡检机器人组网结构示意图
3.3 智能机器人的巡检范围
智能巡检机器人适应无人值班或偏远地区的水电站,降低对人工的依赖,消除人工安全隐患,提高巡检效率。智能巡检机器人的巡检范围包括如下几个方面:
① 户外升压站一次设备的外观、声音、温度、油位、SF6气体密度、避雷器泄漏电流、指示等各类表计读数,断路器、隔离开关、接地刀闸的分合状态、一次设备本体和接头的红外测温等。② 户内电、油、气、水等表计指示、断路器和隔离开关及接地刀闸等机械位置及电气指示、状态指示灯状态、保护压板位置。③ 发电机滑环和碳刷、变压器、控制盘柜内电气元件、电动机等设备红外测温。④ 厂房内气体检测,判断巡检路线中有无火情、积水、漏油、SF6泄漏等情况。
3.4 智能机器人的功能作用
基于多能物联平台的智能巡检机器人将现代服务业理念应用于巡检行业,结合大数据及物联网技术,实现智能化运维,提升运维效率。智能巡检机器人按设定巡检任务对表计数据识别、红外测温、声音检测等定时自主巡检,同时巡检数据实时传输后台,形成数据报表,对被监测物体出现异常自动进行预警,实现安全、绿色、高效的智能型电厂环境。
(1)巡检路线规划
根据现场的实际情况及需求生成直观的可视化现场电子地图,用以显示关键点、巡检点、设备、机器人的巡检路径及所在位置等信息。
(2)图像识别
主要识别仪表读数、指示灯状态、开关位置、液位高度等数据。
(3)红外测温
彩色图像形式显示视野范围内温度,可远程精确测温,无需接触。
(4)噪声识别
机器人搭载的拾音器采集发电机、变压器等设备运行中发出的声音,通过对声音进行时域和频域的分析,判断设备工作状态是否正常。(噪音分析功能还在研发中)
(5)自动充电
机器人检测到电量不足,自动返回充电站充电,通过两个金属触点自动对位连通电源,无需人工管理,充满一次电最大续航时间5h,并且安全有保障。
4 结束语
通过水电站智能巡检机器人在二郎坝发电公司葫芦头电站的运用,与人工巡检相比,在巡检效率与准确率方面具有明显优势,尤其在水电站多点布局、成系统、平台化的成组运行智能巡检机器人,优势更加显著。基于多能物联的水电站智能巡检机器人,在系统架构、结构组成、巡检范围、功能作用及在终端信息采集及平台化运营等多方面也具有明显优势。本文的研究不仅有利于深化多能物联技术在水电站智能运维领域中的创新应用,而且为更多水电站通过巡检机器人开展智能运维提供了借鉴。
猜你喜欢
智能物联技术(2022年2期)2022-11-10
水泵技术(2022年4期)2022-10-24
西北水电(2022年1期)2022-04-16
金桥(2021年8期)2021-08-23
今日农业(2021年8期)2021-07-28
水电站设计(2020年4期)2020-07-16
铁道通信信号(2020年10期)2020-02-07
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
