电动操纵负荷系统在飞行模拟机中的应用
2023-02-24 03:05林鹏
设备管理与维修 2023年2期
林 鹏
(中国国际航空股份有限公司培训部西南分部,四川成都 610200)
0 引言
飞行模拟机的操纵负荷系统是为飞行员提供逼真的座舱操纵感觉力(驾驶杆力、脚蹬力)的人感系统。目前,国内外全动飞行模拟机的操纵负荷系统按照力加载方式的不同可分为液压式和电动式,其中液压式操纵负荷系统存在功耗和噪声大、液压油污染、容易发生漏油或卡阻、维护不方便等诸多缺点。随着现代计算机的发展、伺服控制技术的成熟,高效节能、绿色环保、性能稳定、易于维护和调节的电动式操纵负荷系统已被应用于新型飞行模拟机。
1 电动操纵负荷系统的工作原理
1.1 系统组成
电动操纵负荷系统主要是由负荷组件、传感器、A/D(模/数)和D/A(数/模)转换器、控制系统、PWM(Pulse Width Modulation,脉冲宽度调制)驱动器、传动装置等组成,其中控制系统、PWM驱动器和负荷组件是产生操纵负荷力的核心部件(图1)。

图1 电动操纵负荷系统组成
(1)控制系统由MCLPC(操纵负荷计算机)和cPDSP(高速数字信号处理专用微机)协同工作,其中MCLPC 内置有飞机的飞行操纵负荷力模型,cPDSP 采用Compact PCI(标准PCI 总线)规格的DSP 高速专用微机系统。
(2)PWM 驱动器由功率电子器件和集成电路等构成,其功能是:接受控制系统输出的启动、停止、制动信号,以控制伺服电机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变回路各IGBT(Insulated Gate Bipolar Transistor,绝缘栅双极型晶体管)的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速。
(3)负荷组件中的关键部件是一个交流伺服电机,通常为同步交流无刷伺服电机,主要结构为定子、转子、编码器等。同步交流伺服电机的定子结构和三相感应式电机相似,定子上有相互成120°的三相对称绕组,由PWM 驱动器控制的U、V、W 三相电在定子中形成旋转磁场。不同于感应式电机,同步交流伺服电机的转子是永磁体,永磁体由稀土材料制成。转子磁场和定子旋转磁场相互作用产生转矩,转子的转速n 和旋转磁场的转速是同步的。它的功率范围大,可以做到很大的功率,并且具备大惯量、最高转动速度低且随着功率增大而快速降低等特点,适合作为力矩电机产生稳定平稳的负荷力感。
1.2 工作原理
当飞行员操纵驾驶杆、脚蹬、油门杆等飞行操纵组件时,力传感器测得实际操纵力信号,经过A/D 转换后输入控制系统。安装在负荷组件上的位置传感器、速度传感器获得伺服电机的位置和速度信号,同样经过A/D 转换后输入控制系统。通过控制系统处理后的反馈信号经过D/A 转换,生成PWM 信号后驱动伺服电机产生相应的转矩,产生负荷以平衡飞行员的操纵力。由于飞行员通过感觉操纵力的微小变化来做出判断并执行相应操纵动作,因此要求电动操纵负荷系统在模拟操纵力时要准确、快速。交流伺服电机响应速度快,选用PWM 控制方式时功率损耗较小,同时PWM 波产生的高频微振有利于克服电机轴上的静摩擦力,具有改善伺服系统低速运行和快速启动特性、正反转特性等优点。在整个控制过程中,操纵力始终是主动的、伺服电机是随动的,力始终是系统的控制对象,因此该系统是力伺服系统。
电动操纵负荷系统是人在控制回路中的半实物仿真系统。从系统的内部机理来看,该系统为内、外回路交联的双回路系统。外回路为飞行仿真模型回路,其中模拟机Host 主机通过内置的飞行控制系统数学模型如前舱模型(飞行员操纵)、后舱模型、舵面模型、钢索模型、包线限制等,计算出不同飞行状态下对应的负荷力参数,并通过以太网传递给MCLPC。MCLPC 根据飞行操纵组件的位移、速度信号,通过内置的飞行操纵组件力仿真模型、舵偏角仿真模型,实时计算所需的操纵力以及舵偏角,同时将舵偏角信息传递给模拟机Host 主机。内回路作为力跟踪回路,由MCLPC 和cPDSP 组成的控制系统,和以交流伺服电机为执行机构的负荷组件组成,主要完成外回路计算的操纵负荷力的精确加载。
2 电动操纵负荷系统的控制策略
电动操纵负荷系统的内回路是一个模型跟随力回路,它采用操纵力作为主输入,经过换算后和负荷组件的实际位置、速度和力进行比较。控制系统属于典型的PID(比例、积分、微分)控制类型,PID 控制通常是一个迭代过程,表1 给出了PID 三个控制项对系统性能的影响。
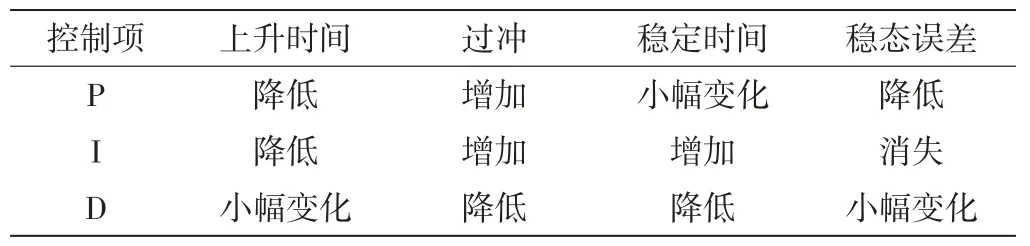
表1 PID 控制项的效应
该系统的控制系统主要包括MCLPC 内置的加速度仿真模型“A=F/M”(其中M 为操纵系统和传动装置的间隙、摩擦折算成的模型质量)、加速度控制环路增益KA、位置偏差控制环路增益KP 和cPDSP 内置的速度控制环路增益KV,它们可以根据飞行控制系统数学模型计算得出,以软件形式运行(图2)。

图2 控制系统工作原理
其中,KV 为速度增益(动态位置偏差),是编码器B(伺服电机编码器)测得的位置信号进行微分后得到的估计速度和指令速度的差值;KP 为位置偏差增益(静态位置偏差),是指令位置和编码器A(负荷组件扇形轮轴编码器)测得实际位置的差值;KA 为加速度增益(动态速度偏差),是指定位置和位置传感器测得的实际位置的差值。
结合PID 控制项的效应可以得出:比例通道(P)控制对象为所需求的速度,所以增益为速度控制环路增益KV,是主控制通道;积分通道(I)消除静差,增益为位置偏差控制环路增益KP;微分通道(D)产生相位超前,以增加频率响应,增益为加速度控制环路增益KA。这3 个增益是依据数学模型,经过理论计算,并经过反复试验和调整后确定的控制器参数,一般情况下不能轻易改动。
3 操纵负荷系统的性能评估
操纵负荷系统的性能要求主要是操纵力感的逼真度,指的是飞行模拟机操纵负荷系统的力感特性和飞机操纵系统的力感特性之间的相似程度。例如,飞机操纵系统既要灵活稳定,与人体运动习惯相适应,也需具备操纵力感,并随着起飞、巡航、降落时飞行姿态的变化而变化,以及自动驾驶及自动油门模式下能反向驱动飞行操纵组件,操纵负荷系统必须复现这些特性。飞行模拟机必须符合中国民用航空局颁布的《飞机飞行模拟机鉴定性能标准》,其中也包含操纵负荷系统的性能标准。通常飞行员会从主观感受和经验判断操纵负荷系统的逼真度,对于工程维护人员来说,可按照模拟机维护手册对操纵负荷系统进行维护和调试,保证其性能的持续稳定,还需定期使用QTG(Qualification Test Guide,鉴定测试指南)程序进行操纵负荷系统的性能测试,测试类型分为静态操纵检查和动态操纵检查。
静态操纵检查侧重于描述弹簧力、摩擦力等静态力感特性,测试对象主要包含驾驶杆力、脚蹬力、前轮转弯力、油门杆杆力等。例如,QTG 中脚蹬力静态测试方法是缓慢、平稳、匀速地用力将脚蹬向左踩至极限位置,再采用同样方式向右踩至极限位置,最后松脚令脚蹬恢复至中立位,QTG 程序将生成脚蹬位置—脚蹬力—方向舵偏转角的静态特性曲线(图3)。其中,1 daN=10 N。静态特性曲线中,实线部分来自真实飞机的测试数据(通常由飞机制造商提供),虚线部分为飞行模拟机的测试曲线,QTG 规定了静态特性曲线中相关参数的容差见表2。通过对飞行模拟机和飞机的力感特性进行比较,可以定量地评估操纵负荷系统的静态操纵特性。
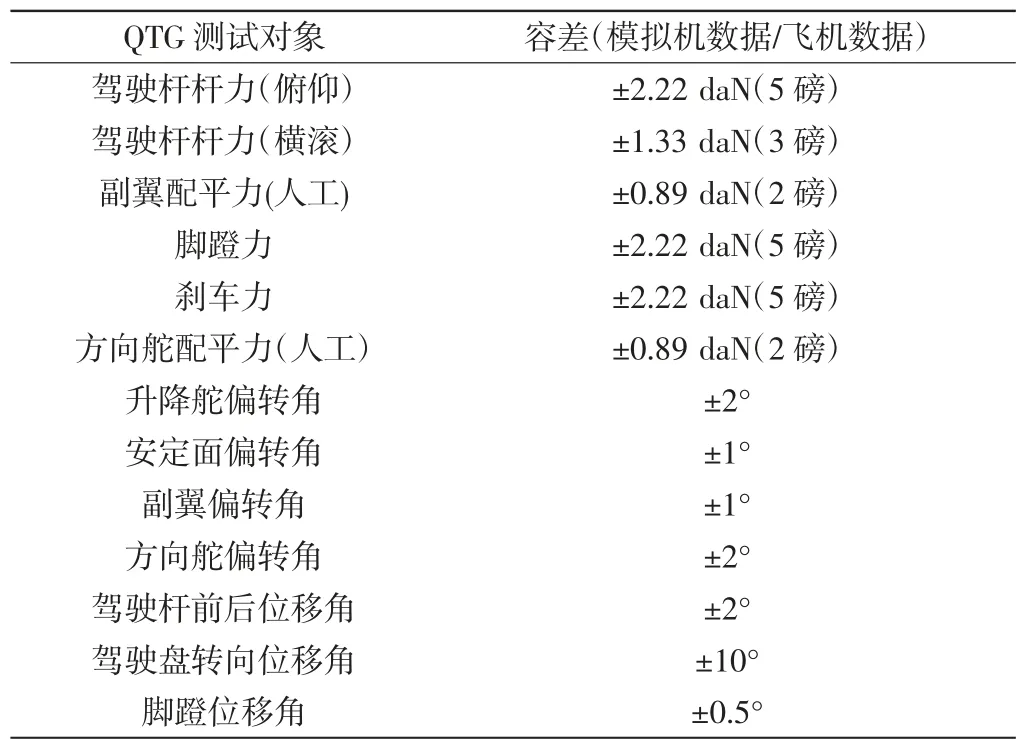
表2 QTG 静态操纵检查测试的容差

图3 脚蹬位置—脚蹬力—方向舵偏转角的静态特性曲线
动态操纵检查侧重于描述惯性力、阻尼力等动态力的动态特性,测试对象主要包含控制俯仰和横滚姿态的驾驶杆,以及控制偏航的脚蹬在一定时间内的位移。对操纵负荷系统的要求有振荡周期短、超调量要尽可能小、稳定且稳态误差为零,否则驾驶杆的抖动会影响飞行员的操纵精度。例如,QTG 中测试驾驶杆俯仰控制方法是把驾驶杆向后拉或向前推到极限位置,然后突然松手释放驾驶杆,驾驶杆从前后极限位置向中立位置自由运动,振荡数次后最终停止在中立位置,QTG 程序将生成驾驶杆位移角度的时间历程曲线,图4是在驾驶杆推杆达到2.7°或拉杆达到2.9°之后松手得到的动态特性曲线。

图4 驾驶杆动态特性曲线(推杆和拉杆)
动态特性曲线是欠阻尼系统响应,其主要指标是周期、超调量和稳态误差。曲线中实线部分来自真实飞机的测试数据,虚线部分为飞行模拟机的测试曲线。QTG 对驾驶杆的俯仰操纵、横滚操纵和脚蹬的偏航操纵等测试对象动态特性曲线的容差也有详细规定,例如驾驶杆俯仰操纵动态特性曲线的要求是从初始位移的90%到第一次通过零点时间容差为±10%,第一次超调量容差为10%,以及超调次数为±1。如果容差过大,可以通过MCLPC 中的DFC(数字式飞行控制)程序,对相关参数进行调节和校准后再进行测试。
此外,除了操纵负荷系统,飞行模拟机还有六自由度运动系统、视景系统、驾驶舱仪表系统等,它们共同构成了飞行模拟机的仿真训练环境。各个系统都有各自的静态特性和动态特性,同时也给整个飞行模拟机仿真环境增加了延时。为了减少仿真环境提供的力感觉、视觉、动感觉、听觉等的时间差,各感觉之间的不同步时间少于100~150 ms,否则飞行员会感觉到眩晕。
4 结束语
飞行模拟机操纵负荷系统的逼真度不仅决定着飞行模拟机性能品质的鉴定,也会直接影响飞行员的训练。如果操纵力的感觉真实,飞行员在训练时就能获取正确的飞行操控经验,否则会产生负迁移效应,使飞行员在面对突发飞行状况时,容易作出错误应激反应,甚至会对飞机过度操纵。本文介绍的某型B737-800 全动飞行模拟机操纵负荷系统,不仅符合中国民用航空局颁布的CCAR60 部,即《飞行模拟训练设备管理和运行规则》中的相关要求,而且能够实时、逼真地复现飞机在不同飞行条件和不同操纵模式下操纵系统的静态和动态特性。
猜你喜欢
教练机(2022年4期)2022-03-13
设备管理与维修(2022年1期)2022-03-10
微特电机(2020年11期)2020-12-30
新生代·上半月(2019年6期)2019-09-10
电子制作(2018年17期)2018-09-28
中国自行车(2018年7期)2018-08-14
通信电源技术(2018年3期)2018-06-26
厦门航空(2017年10期)2018-01-04
汽车工程学报(2017年2期)2017-07-05
工业设计(2016年6期)2016-04-17