
燃料电池空气系统非奇异滑模控制
2023-03-08 02:21刘志恩任志昂周辉卢炽华杜常清
车用发动机 2023年1期
刘志恩,任志昂,周辉,卢炽华,杜常清
(1.先进能源科学与技术广东省实验室佛山分中心(佛山仙湖实验室),广东 佛山 528200;2.武汉理工大学现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070)
以氢能为载体的燃料电池具有高功率密度、高能量转换效率、低温启动和环境友好等优点,被认为是新能源汽车发展的重要技术之一[1]。质子交换膜燃料电池(PEMFC,Proton Exchange Membrane Fuel Cell)的正常运行需要各个辅助子系统的协调工作,其中空气系统耗能占输出功率的20%~30%,对整个燃料电池系统的影响巨大。
空气系统具有强非线性、强耦合性和不确定性等特点,在变载工况下控制不当会引起空气供气系统的失衡。空气流量调节不当会导致氧饥饿、电堆工作效率降低、使用寿命缩短等;空气压力调节不当可能导致空压机喘振、阻塞等。近年来,国内外众多学者对燃料电池空气系统的仿真和控制展开了研究。在空气系统模型研究方面,Pukrushpan等[2]建立了九阶状态模型,由于变量太多,运算量较大,根据该模型设计的控制器控制效果不佳。Suh等[3]忽略阴极排气管路、中冷器和增湿器的动态特性,将九阶模型简化为四阶模型,减小了计算量,同时四阶模型也保证了较高的精度。Talj等[4]在四阶模型基础上,利用电堆阴极压力对氧、氮气体进行近似简化,建立了简化的三阶模型,并将三、四阶模型进行了对比试验,相对误差在5%以内。在空气系统控制策略研究方面,早期国内外学者采用线性控制器对燃料电池空气系统进行控制。Pukrushpan等[5]研究了燃料电池运行过程中的“氧饥饿”现象,提出将过氧比控制在常数值,并设计前馈、动态前馈和PI反馈控制方案。Li等[6]在燃料电池空气供给系统工作点附近对模型进行泰勒展开和线性化处理,使用二次型最优控制方法控制空气压缩机电压来进行系统过氧比调节,但是偏离工作点太远时,控制效果变差。以上研究主要集中于过氧比控制,近年来研究发现,单一过氧比参数控制并不能完全满足系统的要求,在提供阴极流量的同时,保证合适的阴极压力,将能够维持一定的阴阳极压差而不会破坏质子交换膜。此外,适当的阴极压力可以保证空气快速扩散到催化剂层,加快电化学反应,提高电堆工作效率。全书海等[7]在理论上分析进气系统的空气进堆流量和压力的耦合性,并建议对二者进行解耦控制。陈风翔等[8]将空气供给系统通过试验辨识为一个两输入两输出的线性系统,利用多变量解耦的控制理论将系统的传递函数矩阵对角化,从而进行前馈补偿解耦控制,有效地消除了流量与压力间存在的耦合关系,但在负载变化时,模型可能出现失配现象。
本研究建立面向控制的空气系统四阶非线性状态方程,通过台架试验验证模型的有效性,并从理论上建立了基于系统的控制算法。利用精确反馈线性化实现压力和流量解耦,实现非线性模型到线性模型的转化,在线性化模型基础上,设计有限时间内收敛的非奇异终端滑模控制器,并引入比例积分观测器抑制环境影响,实现PEMFC空气系统的阴极压力和过氧比准确跟踪控制。
1 氢燃料电池系统模型
燃料电池流量供应子系统由氢气系统和空气系统两部分组成。供应系统结构见图1。空气系统是由空气压缩机、阴极进排气管路、中冷器、增湿器、电堆阴极流场等组成[9]。为了实现电堆阴极的流量和压力的协同控制,首先建立面向控制的四阶空气系统非线性模型。

图1 PEMFC流量供应子系统结构
1.1 离心式空气压缩机模型
空压机由电机带动,将机械能转化为空气的能量,作为空气系统的主要耗能部件,直接影响系统的净功率。空压机的动态惯性模型为
(1)
式中:τcp为压缩机驱动所需要的转矩;τcm电机输出转矩。转矩分别由下式计算:

(2)

(3)
式中:Cp为空气的比热容;γ为空气比热系数;psm为供给歧管压力;patm为大气压力;kt,kv和Rcm为电机常数;ηcm为电机机械效率;Vcm为电机电压;Wcp为质量流量。Wcp通过非线性曲线拟合方法计算:
Wcp=p1ωcp2psm+p2ωcp2+p3ωcppsm2+
p4ωcppsm+p5ωcp+p6psm2+p7psm+p8。
(4)
1.2 供气、排气管道模型
根据质量守恒定律、空气热力学特性等可以得到供气管道压力表达式:

(5)
式中:psm为供气管道气压;Ra为空气气体常数;Vsm为进气管路体积;Tsm为供气管道内气体温度;Tcp,out为空压机出口气体温度。Tcp,out由式(6)计算:

(6)
排气管道内的温度变化可以忽略,故排气管道压力表达式为

(7)
式中:Vrm,Trm和Wrm,out分别为排气管道体积、温度和出口流量。考虑阴极流量对电堆的影响,定义过氧比[2](Oxygen Excess Ratio)为
(8)
式中:WO2,ca为阴极供给氧气流量;WO2,rec为实际需求氧气流量。Wrm,out可由非线性喷嘴方程计算,表示为

(9)
式中:Cd,AT,θ分别为排气管道中背压阀流量系数、背压阀面积和背压阀开度。


(10)
f(x)=

(11)

(12)

(13)
式中:ci(i=1,…16)为空气系统模型常数,如附录A中所示。
当负载电流突然变化时,电堆阴极侧耗氧量迅速增加,如果氧气得不到及时补充,即过氧比小于1时,将导致阴极出现“氧饥饿”现象,损坏质子交换膜;此外,阴极供氧量不能过高,否则将增加负载功率,降低电堆净输出功率。根据文献[11],为了使燃料电池能够保持不同负载电流下的稳定性,应使过氧比λO2=2,以避免出现氧饥饿,同时保持电堆有较高的净功率。
图2示出3种不同阴极压力下电堆单片电池电压仿真和试验对比。提高阴极压力可以在一定程度上提高电化学性能,但高压下也会增加空气系统辅助设备消耗的能量。在阴极压力小于200 kPa时,电堆单片电池电压明显提高,在阴极压力大于200 kPa时,由于极化损失影响,单片电池的电压无明显改善。综合考虑系统的设计,应使阴极压力保持在期望值200 kPa[12]。
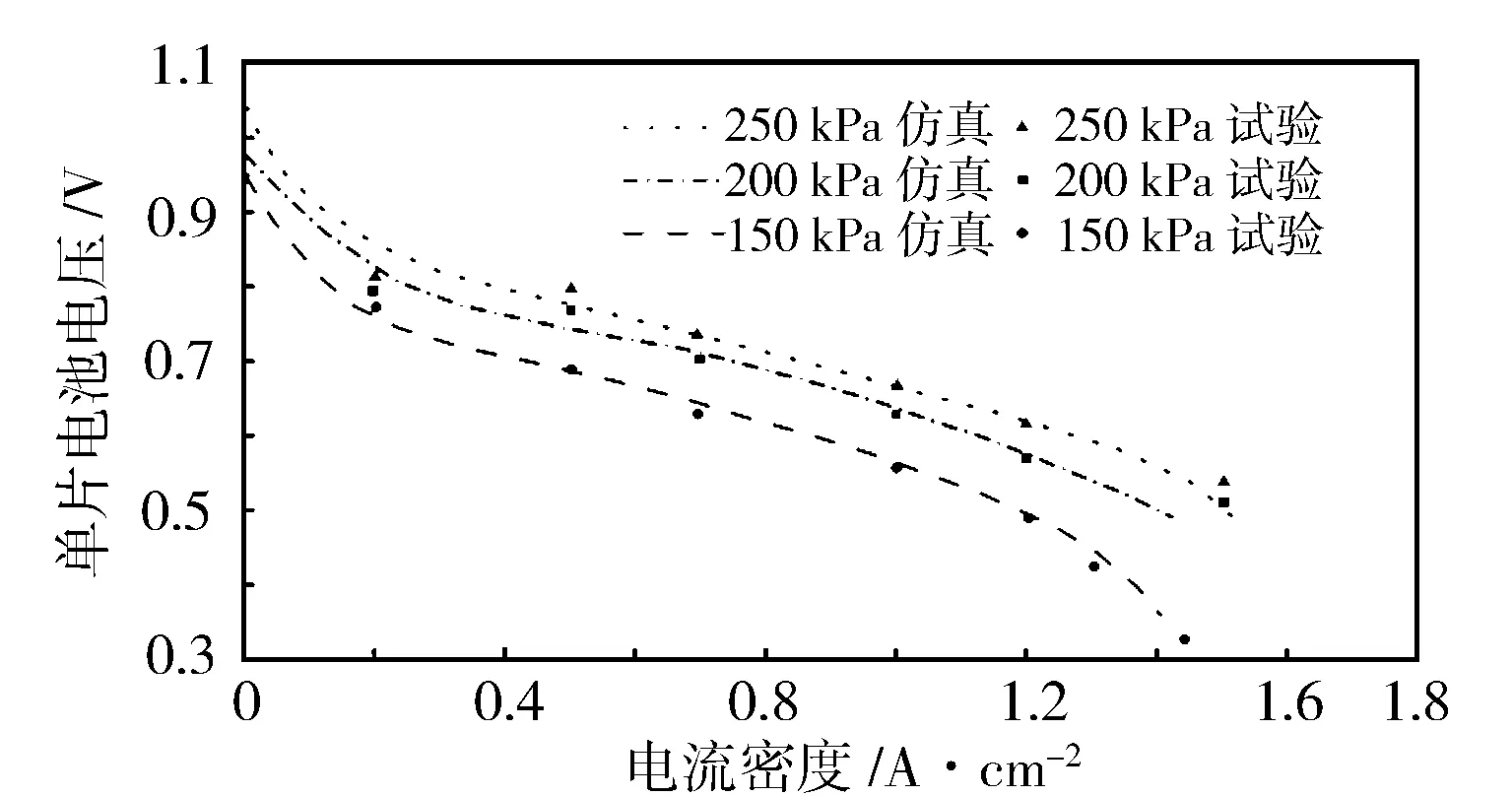
图2 阴极压力对电堆单电池电压的影响
1.3 模型验证
准确的模型是建立一个控制器的基础。本研究在稳态加载运行工况下,将空气系统仿真模型的计算结果和额定62 kW试验电堆的阴极入口压力值、阴极空压机输出总流量值进行对比,综合验证了控制模型的准确性。如图3b和图3c所示,随着电流负载稳态加载,电堆阴极入口压力仿真误差逐渐增大,但始终小于3%,阴极压力最大仿真误差为2.39%,在允许的误差范围内。仿真值和试验值的均方根误差(RMSE,Root Mean Square Error)值见表1,阴极输出总流量在电流小于200 A时与试验值吻合较好,在电流继续增大时,仿真模型输出流量误差略有增大,但是变化趋势与试验数据相似,表明可以基于此模型设计控制器。

图3 仿真模型验证

表1 均方根误差值
本研究的主要目的是:1)将两输入两输出的非线性系统解耦为阴极压力子系统和过氧比子系统;2)在存在电流扰动和未知环境扰动的不确定情况下,系统输出可以严格跟踪期望给定输入。
2 非奇异滑模控制器设计
2.1 反馈线性化控制器设计
为判断所选输出y=[pcaλO2]T能否满足线性化的条件,首先计算系统的相对阶[13]:

(14)

(15)



(16)


(17)



(18)

2.2 非奇异终端滑模控制器设计
反馈线性化是解决非线性系统的有效手段,通过协同控制空压机转速和背压阀开度,实现非线性系统到线性系统的转变。但反馈线性化对系统模型准确性要求很高,实际应用容易受到测量误差的影响,本研究在反馈线性化的基础上设计非奇异终端滑模控制律,使得被控量在有效时间内收敛,同时避免控制系统的奇异型。非奇异滑模控制是一种提高空气系统精度和鲁棒性的手段,在一定程度上可以弥补反馈线性化的对模型不确定性、环境干扰条件下控制不佳的问题。

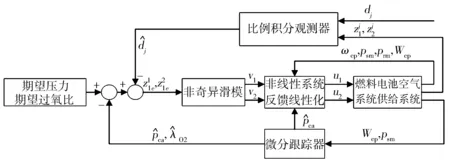
图4 空气系统控制框图

(19)

为使式(19)所示系统的状态在有限时间内收敛,首先设计系统的误差跟踪系统[14]:
(20)

对于任意二阶系统,设计滑模面:

(21)
式中:c1,c2,α1,α2为常量。c1,c2需要保证多项式是赫尔维兹的。α1,α2选取方法为

(22)
为使系统在有限的时间内到达滑模面,设计控制律:

c1sign(e1)|e1|α1,
(23)
u(t)=ueq+un,
(24)

(25)
v=-(kd+kt+η)sign(s)。
(26)

选取李亚普诺夫函数V=s2/2,分析其稳定性。结合式(23)至式(26),对V求时间导数:





(-T(s-d)s-kt|s|)=

η|s|+(-Ts2+Tds-kt|s|)=


(27)
由式(27)可知,控制律满足李亚普诺夫稳定性,保证s从任意s≠0的初始状态都能在有限的时间内到达滑模面,而s=0也保证了系统的误差为0。将此控制律应用于式(17)所示系统,则有:

c1sign(e1)|e1|α1+un,
(28)

(29)

2.3 观测器设计
由于阴极压力x3不可测,为此设计微分跟踪器。根据式(11)中供气管道x2的状态方程,求出阴极压力x3的表达式:


(31)
式中:u(t)为输入信号;设计参数R,l1,l2>0,0 燃料电池空气系统在实际的环境中运行不仅受到电流干扰,还有未知环境扰动。为实现空气系统在有界控制输入和外界未知扰动的作用条件下的稳定性,将式(18)精确反馈线性化模型中引入有界的未知环境干扰,写成标准形式: (32) 图5 比例积分观测器 根据误差积分准则[17],分析了4种误差:误差平方积分(ISE),主要反映响应速度和振荡性能;绝对误差积分(IAE),主要反映瞬态响应;时间和绝对误差乘积积分(ITAE),主要反映振荡性能;时间和误差平方乘积积分(ITSE),主要反映后期瞬态响应误差。各误差积分计算如下: (33) (34) (35) (36) 在给定电流变化工况下(见图6),3种控制方法的仿真结果如图7所示。由图7可以看出,在负载电流的变化下,阴极压力和过氧比均收敛于期望值,实现了二者的解耦控制。 图6 电流变化 图7 阴极压力和过氧比变化 3种控制方法的阴极压力和过氧比的误差积分分别见表2和表3。对于阴极压力控制,采用非奇异滑模控制方法的阴极压力超调量比传统滑模控制和反馈线性化跟踪控制减小约50%,非奇异滑模控制4种误差积分值均为最小,传统滑模控制和反馈线性化误差积分值比较接近。对于过氧比的控制,在负载电流正向加载过程中,过氧比出现小于2的负尖峰,但还是大于1,满足电堆内的耗氧需求。非奇异滑模控制过氧比四种误差积分也均小于传统滑模和反馈线性化控制,表明非奇异滑模控制方法对于阴极压力和过氧比有良好的控制性能。图8示出阴极压力观测值与仿真值的曲线。由图8可看出,阴极压力观测值和仿真值最大相对误差约为0.5%,仿真值和观测值的均方根误差为453.4,表明微分跟踪器可以实现对阴极压力的估计。 图8 阴极压力观测 表2 阴极压力误差对比分析 表3 过氧比误差对比分析 表4 空气系统模型参数变化 图9 模型参数变化情况下阴极压力和过氧比的变化 图10 环境噪声观测 建立面向控制的四阶燃料电池空气系统模型,在稳态加载运行工况下,空气系统仿真模型和额定62 kW试验电堆的阴极入口压力值、阴极空压机输出总流量值吻合较好,综合验证了控制模型的准确性。 利用全局反馈线性化的方法将燃料电池空气系统非线性模型解耦为电堆阴极压力和过氧比线性独立子系统,同时控制阴极压力和过氧比维持在期望值,以提高电堆性能、延长电堆使用寿命。 针对燃料电池空气系统非线性、强耦合性、易受电流影响和噪声干扰等特点提出一种基于反馈线性化的非奇异滑模控制策略,并引入比例积分观测器;相较于传统滑模和单一反馈线性化控制,该方法对于阴极压力和过氧比有良好的控制性能和较强的鲁棒性。


3 仿真分析














4 结束语
猜你喜欢
中等数学(2020年2期)2020-08-24
中国粮油学报(2019年4期)2019-07-12
测控技术(2018年9期)2018-11-25
——过氧碳酸钠
农村青少年科学探究(2018年4期)2018-07-04
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
生物学教学(2016年4期)2016-08-15
电源技术(2015年5期)2015-08-22
电源技术(2015年7期)2015-08-22
电源技术(2014年5期)2014-07-07
