
超分辨率学习算法在海岸地形航空摄影测量中的应用
2023-03-09 06:56马金龙
北京测绘 2023年8期
马金龙
(中煤航测遥感集团有限公司,陕西 西安 710199)
0 引言
海岸地形又称“海岸地貌”,该地形不仅具有良好的自然条件,更具有丰沃的自然资源,为人类群居以及经济活动提供场所,同样是军事活动的咽喉地带[1]。因此,掌握海岸地形的地理信息是非常重要的。伴随国家飞速发展基础建设的政策下,海岸地区发生了翻天覆地的变化,增强了对海岸地形的地理信息测绘需求的迫切性[2]。
张建芳发现利用人工携带全站仪与全球定位系统(global positioning system,GPS)设备进行海岸地形测绘时会被噪点影响,造成测绘结果与实际结果出现过大的偏差,因此提出一种利用船载激光扫描技术的海岸地形测绘新方法,该方法虽能有效消除噪点,但无法排除匹配图像因分辨率过低造成的新地形测绘误差[3]。韩亚超等人利用几何检验校正算法对机载高谱仪的检校原理以及模型特点进行校正,将矫正后的机载高谱仪用于海岸地形的测量[4]。该方法虽然具有一定可行性,实现了无测绘点的海岸地形的地理信息测量,但对于某些复杂海岸地形而言,测绘点是准确高效进行地理信息测绘的必需条件,并且该方法获取的分辨率遥感影像较低,因此,该方法有一定的局限性,无法实现任意海岸地形的地理信息测量技术。
遥感影像是一种特殊意义上的“照片”,该照片可以从几百千米甚至几千千米处的地球以及地球某处进行记录,并从中获取大量的信息[5]。航空摄影则是将航空专用摄影仪放在航空器上,从一定高度的空中拍摄所需目标的一种影像获取方式[6]。因为拍摄时间短,拍摄结果准确以及经济性实用等特点被用于众多行业。海岸地形是陆地以及海洋彼此间发生接触作用产生的特殊地带,且该地带具有一定的宽度,不断地受波浪、风力、潮汐、河流、生物、海平面变动以及地壳运动的影响等形成的一种特殊地形。将遥感影像中的航空摄影技术用于海岸地形的地理信息测绘中[7],精确测量该地形的地理信息,避免了许多行业之间出现的开发管理之间的纷争,保证了不同部门之间的和平协作,限制了相关资源环境的过度开发,保护海岸资源。
对此,提出研究基于遥感影像的海岸地形航空摄影测量技术。首先获取到海岸地形遥感影像的原始数据,然后利用超分辨率学习算法对原始海岸地形遥感影像进行校正,以得到高分辨率海岸地形遥感影像,挑选规则格网形式的数字高程模型(digital elevation model,DEM),将其与最大类间方差法和反距离加权值法完成滤波和内插处理后的遥感影像相结合,生成海岸地形的数字高程模型,以获取海岸地形的空间特征变化信息,最后结合该信息选取海岸地形因子,绘制海岸地形的地理信息图,完成海岸地形航空测量。实验结果表明,本文方法可有效实现海岸地形的地理信息测绘,且测绘的精度较高。
1 海岸地形航空摄影测量方法
1.1 海岸地形遥感影像获取
本文采用SIRIUS PRO无人机搭载松下GX1数码相机,获取无人机海岸地形航测遥感影像[8]。根据作业任务和航空摄影规范的要求,利用地面监控站对测区进行技术参数设计,主要包括:航高、相片重叠度、航线参数等。
首先根据要求成图的比例尺来确定地面采样距离,计算无人机飞行的高度为
(1)
式中,H为航高;F为物镜镜头焦距;a为像元尺寸;GSD为影像地面分辨率。
然后设置相片重叠度,本文设置的航向重叠度为85%,旁向重叠度为65%。
最后设置航线参数,根据测区的范围,确定起点和终点的经纬度、航线的方向、航线的长短,计算出摄影基线的大小和航线间隔宽度。地面监控站可以设置航线的参数,自动生成航线。
式中,I表示图像尺寸;p%和q%分别表示图像航向重叠度和旁向重叠度;f表示摄影机主距;B表示摄影基线;D表示航线间隔宽度。
1.2 遥感影像重建
由于上述获取到的无人机海岸地形航测遥感影像的分辨率过低,海岸地形测绘结果存在一定偏差影响,致使海岸地形的测绘信息失准。图像超分辨率重建属于计算机低级视觉任务,根据重建图像过程中所需观测图像数量的不同,可分为单幅图像超分辨率重建和序列图像超分辨率重建。为解决上述问题,利用超分辨率学习算法对海岸地形的低分辨率遥感影像进行重建,得到海岸地形的高分辨率遥感影像[9-10],见图1。

图1 超分辨率重建过程

低分辨率图像经由超分辨率学习算法复原为高分辨率图像,复原过程被称为图像重建过程,则超分辨率学习算法利用局部线性回归问题代替分辨率问题构建模型,其形式如式(5)所示。
(5)

利用随机森林算法即可完成上述学习问题。把输入数据进行处理,且处理的方法为分层划分,进而获得树结构,再依据其树结构明确局部回归函数数据的相关性。每一个线性回归函数皆可以储存在每个叶节点中,利用规则化最小二乘问题即可对上述函数进行求解计算。
为了更好地学习树结构,为其加入目标函数G,使结点划分函数δ得到优化,其定义为
(6)
将上文提到的影像与模糊核之间的特点考虑进计算中,便获得加入模糊核的E,该结果方便了构建树时结点划分。因此,E的最终形式为
(7)
经过约束的质量测度函数的叶结点的数据纯度更高,高分辨率的遥感影像重建效果更好。
1.3 海岸地形模型的生成
本文通过有限离散处理高程模型后即可得到数字高程模型(DEM)[11]。
1.3.1DEM的选取
将某地区的地形表面高程变化体现出来即为DEM的核心,并且可用多种表达方式。地表变化体现的难度受地表特征的影响。DEM主要分为三类,将规则网格类[12]、不规则三角网类以及数字等高线类的DEM进行对比分析,其对比情况见表1。

表1 不同数据结构的差异对比
根据表1的数据,选用规则格网形式的数字地面模型。
1.3.2基于最大类间方差法的遥感影像分类
在规则格网形式的数字地面模型中,根据上述重建后的海岸地形的高分辨率遥感影像,通过最大类间方差法对遥感影像进行分类[13]。利用阈值将海岸地形的遥感影像区分成两组,且要求该影像的灰度级取L,灰度取值范围取(0,L-1)。设定C0为背景区域,C1为目标区域,p0、p1表示C0和C1之间的概率;其中,p0=p(k),p1=1-p(k),均值为u0、u1,那么两组影像的数学期望即为式(8)。
u=p0u0+p1u1
(8)
两组区域的类间方差则为
(9)
权衡阈值分离不同种类的指标即为σ(k),且该指标为性能指标,只有σ(k)为极大值时,才能得到最佳阈值Th,Th的表达式为
(10)
将点云进行分类时,依据由粗到细的分类要求,利用Otsu方法进行数次迭代,逐步达到点云分类的目的。该算法的具体流程如下:
(1)规则网格化重采样1.2校正后的海岸地形遥感影像,期间应确保海岸地形遥感影像和采样间距几乎相同。
(2)高程值灰度化流程(1)中的海岸地形遥感影像,保证每个结点的高程与灰度值均互为相应关系,其高程值灰度化公式为
(11)
其中,像素点i的灰度值用Gi描述,且该像素点位为深度图像;高程值用Zi描述;最大的高程值用Z′描述;最小的高程值则用Z″描述。
(3)依据程序路线访问海岸地形遥感影像中的每一个结点,计算所有结点的类间方差数值,并从所有数值中筛选出类间方差最大数值,依据该最大数值确认其对应的灰度值,并以该灰度值作为分割阈值。
(4)利用式(14)变换分割阈值的选取对象,不再以灰度值作为阈值选取对象,改用高程值作为分割阈值,并称该分割阈值为高程分割阈值。
(5)将1.2节校正后的高分辨率海岸地形遥感影像进行分类,对比像素点的高程值与高程分割阈值,后者大于前者时,该像素点即视为地面点,反之则视为非地面点。
(6)将流程(5)中得到的非地面点的海岸地形遥感影像据按其分类效果与滤波处理需求进行流程(1)~(5)重复操作,直至符合需求,迭代结束。
将高分辨率海岸地形遥感影像按照实际需求进行划分,一次划分后,划分结果为分成两类,一类为明显地物点,另一类为其他地面点;满足实际要求划分结束,若不满足,进行二次三次等多次划分,直至满足实际需求,划分停止。为直观地表达划分过程,以二次划分为例,其划分过程如图2所示。
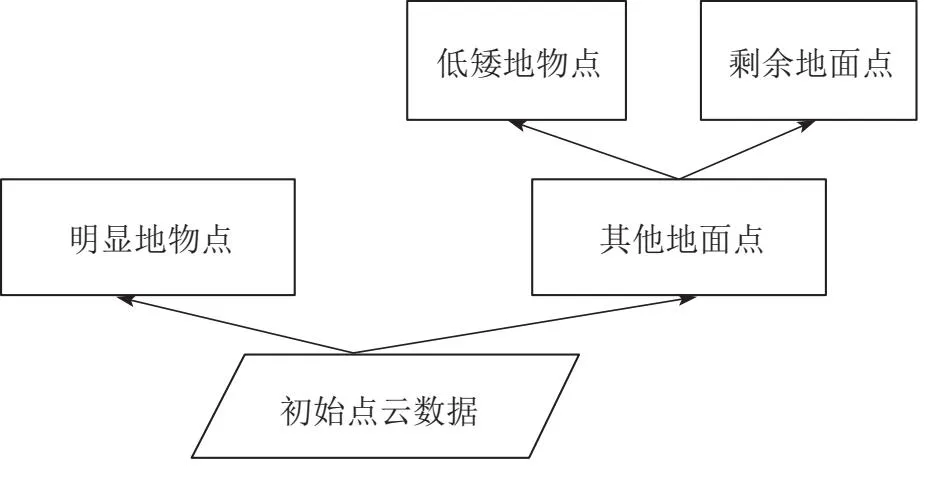
图2 二次地点划分示意图
1.3.3基于反距离加权插值法的遥感影像匹配
对经过2.3.2滤波处理后的海岸地形遥感影像进行内插,得到海岸地形空间特征变化信息,该内插方法为反距离加权插值法(inverse distance weight,IDW),是对插值法进行加权平均处理后,满足进行插值要求的一种方法[14]。该方法将距离充当权重,且该距离要求是插值点Z(s0)和样本点si间的,并对其平均加权,其距离di0越小时,权重值λi越大。除λi以及di0间受到指数p的影响而呈现反比状态之外,权重系数也受到该指数的影响,说明各采样点值对插值结果有一定影响,且该影响造成权重之和只能取1。
进行计算时发现,指数p取值不同时,插值Z(s0)的表达也不相同。
p=1时,以距离反比法称呼,其表达式见式(12)。
(12)
p=2时,以距离平方反比法称呼,其表达式见式(13)。
(13)
使用上述方法计算权重值并对其平均加权后,即可实现海岸地形遥感影像的内插,获取海岸地形空间特征变化信息,为海岸地形的地理信息测绘提供数据支持[15]。
将获取的经校正的海岸地形遥感影像与获取的海岸地形空间特征变化信息相结合,并依据海岸地形特点选取平、剖面曲率、海拔高度、地势起伏度、地表切割深度、地表粗糙度以及高程变异系数等七个参数作为海岸地形因子,将它们进行地物图像匹配,得到完整的海岸地形地理信息,其表达式为
W(x)=dE(x)
(14)
式中,E(x)表示视差平面。
1.4 绘制海岸地形的地理信息图
EPS(全球统计数据/分析平台,economy prediction system)3D(三维,three-dimensional)Survey三维测图系统能够真正意义上实现裸眼3D测图,在此系统上进行三维测图时,不需要佩戴任何相关设备,即可开始三维测图作业。因此,本文根据上述获取的海岸地形地理信息,通过EPS地理信息平台绘制海岸地形的地理信息图,实现海岸地形航空测量。实验区局部成果示意图如图3所示。

图3 实验区局部成果示意图
2 实验分析
以某海岸为实验对象,并在该海岸地形中任意设置100个测绘点,并从该测绘点中随机抽取5个测绘点作为本文方法的实验测绘地点。实验需求的海岸地形遥感影像由中煤航测遥感集团有限公司提供,选取影像领域中的峰值信噪比峰值信噪比(peak signal to noise ratio,PSNR)指标作为本文方法的海岸地形遥感影像质量评价指标,且该指标数值越高,影像质量越好。
能够用数量较少的地形因子进行组合,并完全体现海岸地形特征与海岸地形分布规律的地形因子称之为最佳地形因子。利用最佳因子进行海岸地形测绘时可以极大程度减少多余数据,提升了海岸地形的分析效率。将运用本文方法选取出7个地形因子进行编号,按序分为1~7,将地形因子与海岸地形的空间分析工具相结合后,进行数据分析,得到海岸地形因子之间的关联系数,如表2所示。
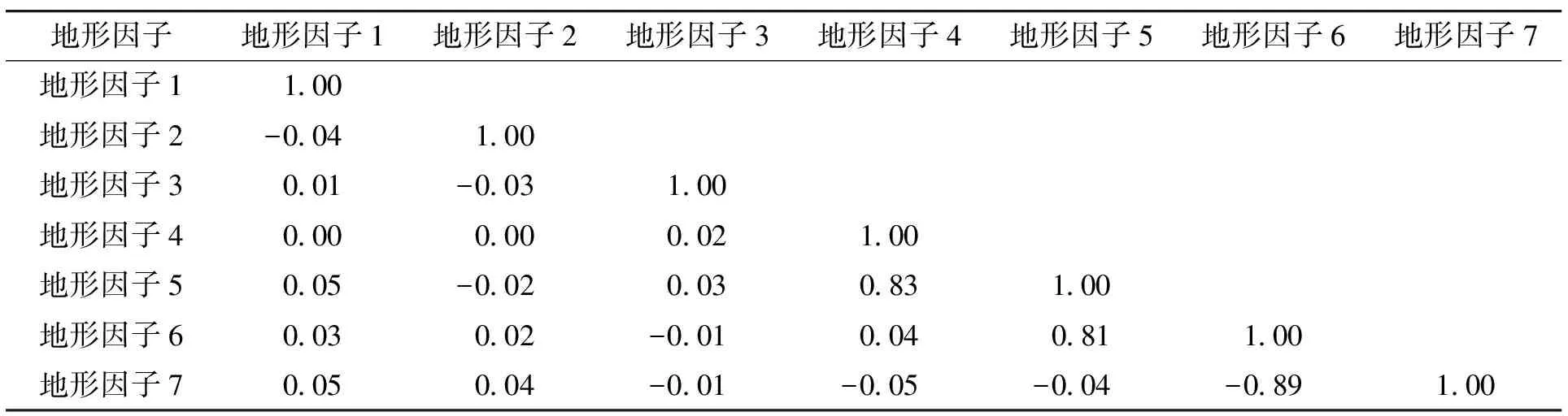
表2 海岸地区各地形因子之间相关系数
分析表2发现,经本文方法选取的这7个地形因子中,前3个地形因子与其他地形因子的关联性极低,无法将海岸地形的地貌特征差异明显地体现出来,因此将前3种地形因子筛除;后4个地形因子之间的关联系数的数值较高,说明它们之间的有着较强的相关性,其中地形因子4与地形因子5之间的相关系数为0.83、地形因子5与地形因子6的相关系数为0.81、地形因子6与地形因子7之间的相关系数为0.89。
经本文方法选取4个地形因子后,分别计算它们的最小值、最大值、平均值以及标准差,并将相关数据整理至表3中。其中,地形因子的聚集情况由平均值的数值体现,权衡地形因子的离散情况由标准差的数值体现。地表单元的切割剥蚀程度以及区域内构造活动强度的差异则用地形因子4和地形因子5这两个地形因子体现;海岸地形的地面凹凸不平的程度用地形因子6体现;海岸地形的高低起伏变化则用地形因子7体现。
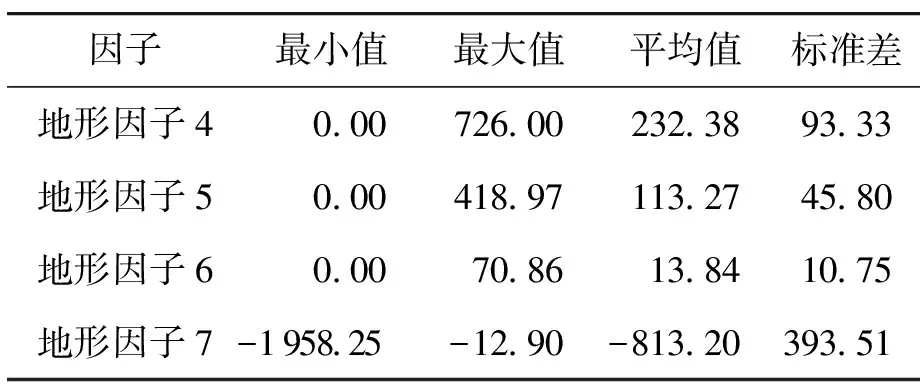
表3 海岸地区地形因子数据信息
对表3中的数据进行分析,将地形因子4与地形因子5的标准差数值进行大小对比,地形因子4的标准差93.33大于地形因子5的标准差45.80,因此筛除地形因子5。以地形因子4、地形因子6以及地形因子7这3个地形因子作为反映海岸地形的地貌特征与分布规律的最佳地形因子。
上述实验结果说明,利用本文方法可以对海岸地形的7个地形因子进行有效筛选,选出海岸地形的3个最佳地形因子,分别为地势起伏度、地表粗糙度与高程变异系数,并将最佳地形因子用于该海岸的地理信息图测绘,提升了该海岸地理信息图的测绘精度。
利用本文方法测绘该海岸地形的地理信息时,对经本文方法测绘的海岸地形测绘点测量精度进行检验查核,该验核结果见表4,其中△X、△Y分别为平面测量精度,△H则为高程测量精度。
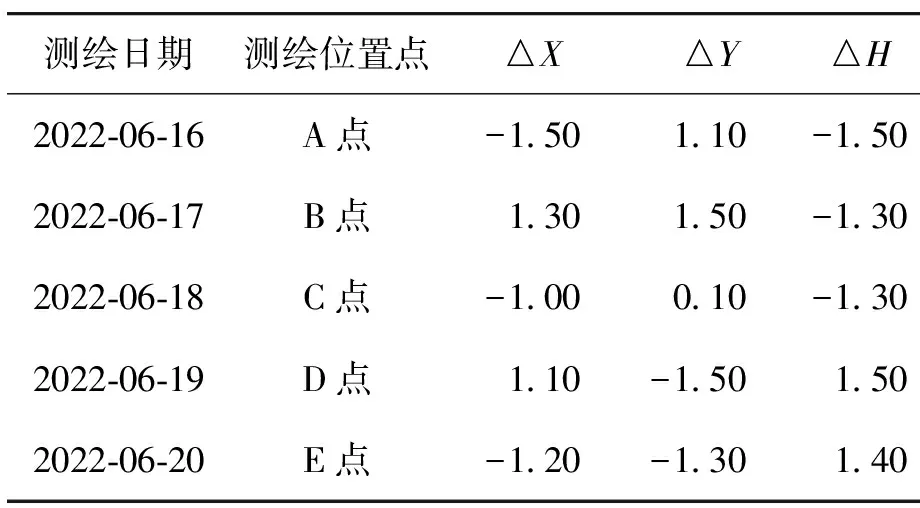
表4 测绘点精度验核表
对表4中数据进行分析计算,实验中随机抽取的五个测绘点的平面误差与高程误差均小于等于±1.50。实验说明本文方法对海岸地形的地理信息的测绘不仅是可行的,而且测量的误差较低。
为验证经本文方法提升的海岸地形遥感影像的高分辨影像质量,收集五个测绘点的原始分辨率遥感影像与优化后高分辨率遥感影像的PSNR平均值,如图4所示。
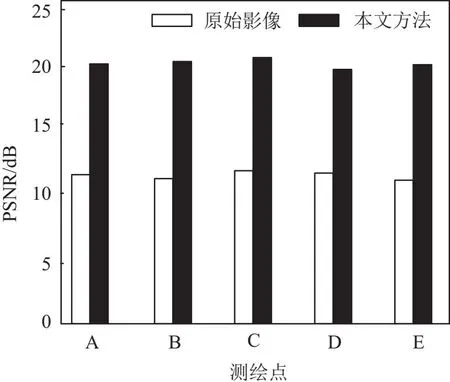
图4 优化前后的PSNR平均值
由图4发现,本文方法优化后的五个测绘点的遥感影像PSNR指标平均值在19 dB以上,原始影像的PSNR指标平均值在12 dB以上,经本文方法优化后的五个测绘点的遥感影像PSNR指标平均值显著高于原始影像的PSNR指标平均值。实验表明,可以利用本文方法大幅提升海岸地形的测绘遥感影像的分辨率,提升海岸地形的地理信息测绘效果。
3 结束语
现有的航空测量技术具有测量效果较差的问题,对此,本文研究一种新的海岸地形航空摄影测量技术。通过松下GX1数码相机,获取无人机海岸地形航测遥感影像,并采用超分辨率学习算法对海岸地形遥感影像重建,获取高分辨率遥感影像,挑选规则格网形式的DEM,生成海岸地形的数字高程模型,根据重建后的遥感影像,通过最大类间方差法对遥感影像进行分类,结合海岸地形因子,进行地物图像匹配,得到完整的海岸地形地理信息,绘制海岸地形的地理信息图,实现海岸地形航空测量。实验结果表明:该方法可优化遥感影像的低分辨率过低问题,获取分辨率较高的遥感影像,不仅可实现海岸地形的地理信息测绘,还保证了测绘时的测量精度。
猜你喜欢
当代陕西(2020年23期)2021-01-07
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
数学物理学报(2019年3期)2019-07-23
家庭影院技术(2018年9期)2018-11-02
中国公共安全(2017年7期)2017-10-13
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
自动化学报(2017年5期)2017-05-14
电子制作(2017年9期)2017-04-17
成都信息工程大学学报(2017年6期)2017-03-16
