
可穿戴外骨骼机器人研究现状
2023-03-11 06:29陈迎年
科技创新与应用 2023年6期
郭 庆,陈迎年
(华东理工大学 机械与动力工程学院,上海 200030)
近年来,中国老龄化社会程度不断加深,老年人出行及病后健康训练均需要大量可穿戴外骨骼机器人的协助,同时在军事领域也存在提高单兵装备优势、保持军队战斗力和节约能源的需求,而在民用领域也存在辅助人类托举重物、提高残疾人行走能力的需要,因此,可穿戴外骨骼机器人的发展无疑对经济、社会和国防均有着重要的意义。
可穿戴外骨骼机器人是通过仿生学、机构学和控制学等学科的交叉融合发展而来的,其中包含了机械结构、信息传感和自动控制等关键技术,近年来已经成为国内外的研究热点[1]。本文从不同角度阐述了当前国内外可穿戴外骨骼机器人的发展现状,并对相关应用与关键技术进行了介绍,讨论当前制约可穿戴外骨骼机器人发展的难点,最后对可穿戴外骨骼机器人的发展进行展望。
1 国外可穿戴外骨骼机器人研究现状
20世纪60年代末期,美国及前南斯拉夫对外骨骼机器人的研究便已经开展,美国进行外骨骼机器人研究的目的是增强单兵能力,以更好地服务军事,前南斯拉夫的目的则是用于辅助残障人士的日常行走[2]。随后,下肢外骨骼机器人得到了世界各国的关注,日本、俄罗斯、法国、加拿大和以色列等国家也纷纷加入下肢外骨骼机器人的研究之中。
1.1 欧美
2004年,在美国国防部高级研究计划局(DARPA)的资助下,加州大学伯克利分校推出了其第一代单兵下肢外骨骼助力系统BLEEX[3]。该系统拥有2个拟人腿,单腿包括髋关节、膝关节、踝关节和弹簧等共同控制的7个自由度。该系统的质量大约为45 kg,可载荷32 kg的重物,采用液压驱动关节运动,在这款下肢外骨骼机器人上创新性地大量集成各种传感器,以实时获取人体运动信息,最大限度贴合人体运动规律[4]。该款下肢外骨骼机器人不仅可以帮助士兵搬运重物,也可以辅助医疗人员转移伤员或者辅助消防员携带消防设备。在此基础上,Kazerooni教授及其团队又开发出了“ExoHiker”和“ExoClimber”2款下肢助力外骨骼机器人。前者设计的目的是长时间执行任务携带重物,质量14 kg,额定负荷680 N,采用液压驱动[5];后者主要用于上楼梯和爬山,质量约22.7 kg,额定负荷680 N,采用液压驱动[6]。
2007年,美国Sarcos公司研制出一款外骨骼机器人XOS,该型外骨骼机器人采用液压驱动,质量70 kg,可以在背负重物的情况下保持正常速度行走。而且该公司于2010年研发出XOS-2型全身外骨骼机器人,大幅提高负荷能力,采用外部电源供能[7]。2019年,该公司又推出一款用于快速搬运货物的外骨骼机器人GuardianXO,可以将佩戴者的力量放大近20倍,并可以实时准确反映佩戴者的运动操作[8]。
2010年,伯克利仿生科技公司推出HULC下肢外骨骼助力系统,该系统拥有提高佩戴者的最大承重能力介于68~91 kg之间、降低佩戴者的代谢成本2大优势,采用电池驱动,通过可以选择配置的承载部件搭载约91 kg的负载,把重量均匀分布在承载系统上,使得不需要穿戴者来承重[9]。2017年,洛克希德·马丁公司又推出一款下半身可穿戴膝关节助力外骨骼ONYX,该系统可以有效减轻佩戴者背部及腿部的负荷,采用电机驱动,可以有效协助佩戴者托举重物或者在斜坡行走[10]。几种外骨骼机器人如图1至图5所示。
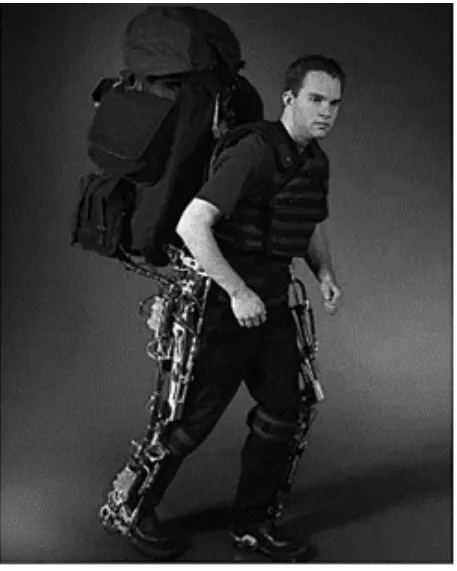
图1 BLEEX

图2 ExoHiker
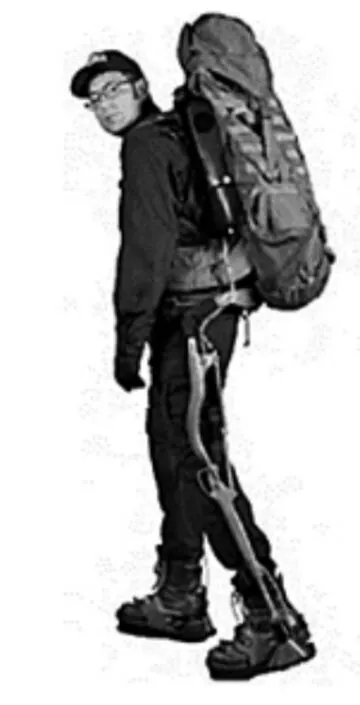
图3 ExoClimber
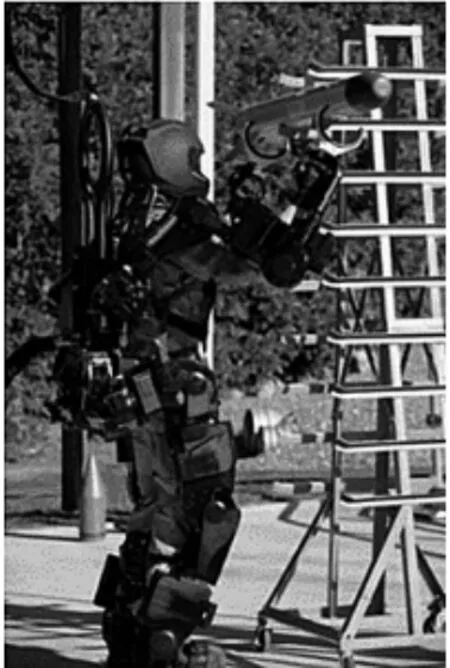
图4 XOS-2
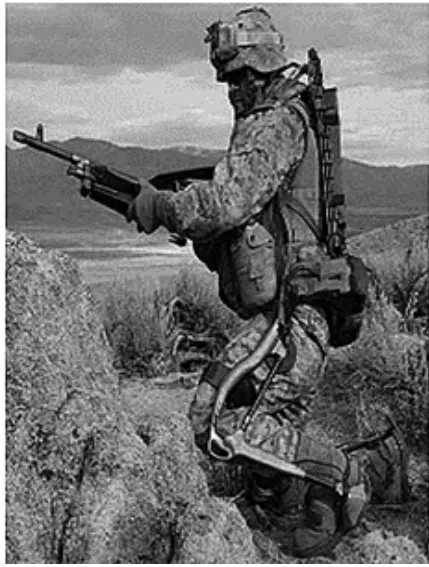
图5 HULC
2011年,法国RB3D公司研发的“大力神”外骨骼装置质量约17 kg,能够托起60 kg的重物,系统采用动力电池组供电,“大力神”突出的特点就是没有采用任何传感器记录人体的运动信息,而是基于控制算法,使其了解佩戴者所表达的意图并完成相应的动作[11]。2015年,加拿大仿生动力公司研制出一种被动式可穿戴外骨骼装置PowerWalk,其最大的特点为能够吸收膝关节弯曲的能量来进行发电,极大地节省了进行任务时的能源消耗[12]。2019年,加拿大渥太华大学开发了一种被动步行辅助外骨骼机器人(PWAE),该系统由2个支撑腿及座椅框架组成,质量约为5.68 kg,根据实际测试,佩戴者在站立及行走时可以获得较大的外骨骼额外支撑[13]。2020年,德国仿生学公司German Bionics推出第四代Cray X外骨骼机器人,并采用碳纤维设计与电池驱动,通过在工人背上提供支撑使得工人在举起重物时免受重物过度的压力,进而提高工人安全性与工作效率,在这款外骨骼机器人身上还创新性地运用了集成云接口、物联网等智能技术[14]。
1.2 日韩
2009年,日本筑波大学基于帮助健康人增强力量,开发出一种下肢运动辅助外骨骼(HAL)[15]。经过多年发展,HAL外骨骼已经发展至HAL-5版本,HAL-5的质量约23 kg,其拥有8个可控关节,包括下肢关节与上肢关节,由电机驱动,值得注意的是该型号外骨骼采用肌电信号作为穿戴者运动信息的输入控制信号,并通过电机控制关节运动[16]。此外,近年日本还研究了几款优秀的外骨骼机器人,包括W.W.H-KH、Musclesuit等。
2014年,韩国汉阳大学开发出一款外骨骼辅助机器人HEXAR,用于协助个人承担重物,在髋关节利用恒力机制承担上部外骨骼系统的重量,在踝关节承担外骨骼系统的总重量,通过利用自身的弹性势能为行走提供动力[17]。2018年。韩国汉阳大学提出了负重型下肢膝关节外骨骼机器人,可以在膝关节伸展过程中进行机械锁定,并将载荷转移到地面,并且还可以在膝关节处于摆动阶段时松开锁扣,随佩戴者运动[18]。几种外骨骼机器人如图6至图10所示。
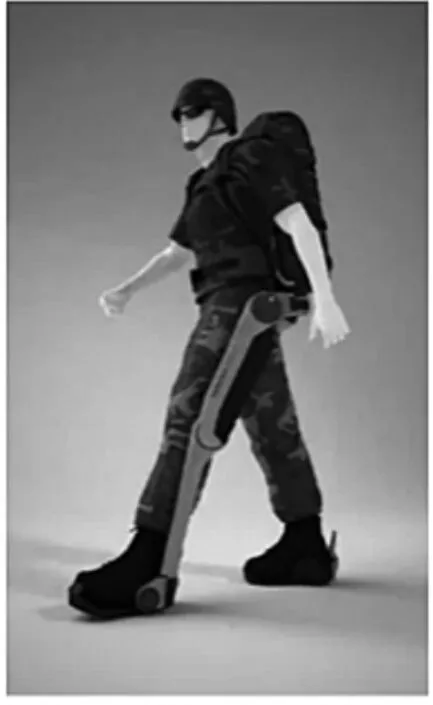
图6 大力神

图10 HEXAR
2 国内可穿戴外骨骼机器人研究现状
我国在可穿戴外骨骼机器人技术研究方面起步较晚、投入较少,与美国、日本仍存在较大差距,目前国内研究仍处于关键技术突破与试制样机阶段,许多诸如机械、传动、传感和控制等关键技术仍在研究与验证中,在外骨骼商业化应用上发展缓慢。
2007年,海军航空工程学院设计的NAEIES外骨骼采用电机和气动弹簧驱动,并多次仿真研究装置控制方法,当前该型外骨骼机器人已发展三代,第三代由空气弹簧和电缆电机驱动,部分结构由碳纤维制成,载重量较大,设计优秀,可以完成上、下和蹲等动作[19]。2008年,华东理工大学研制出ELEBOT外骨骼机器人,采用液压驱动,通过足底压力传输信息和识别动力传感器信息获取佩戴者行动意图[20]。2016年,北京工业大学的第三代负重外骨骼,由液压驱动,采用电池供电,可以在负载情况下完成上下楼梯、爬坡等动作[21]。2016年哈尔滨工业大学开发了HIT-LEX外骨骼机器人,其与人体运动的协调性较为出色[22]。2020年北京航空航天大学设计了一款辅助下肢运动功能障碍患者的被动下肢外骨骼,其有着较为出色的重力补偿性能[23]。此外,还有中国兵器工业第二〇二研究所、航天18所等单位也在进行着相关研究。
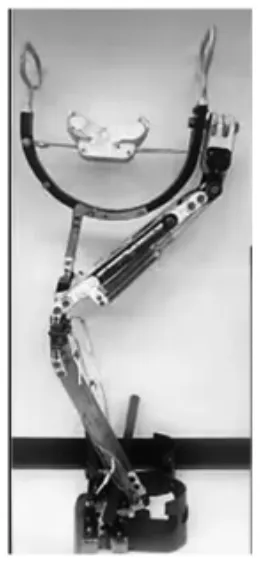
图7 PWAE
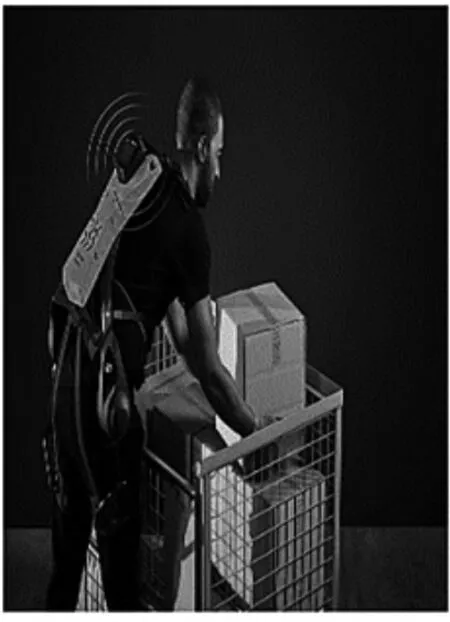
图8 Cray X
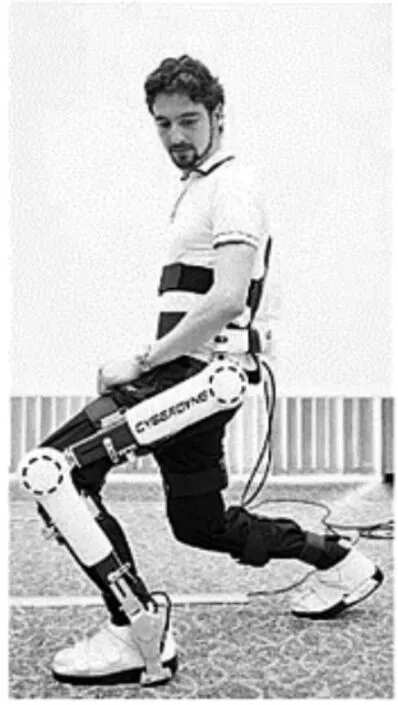
图9 HAL-5
3 可穿戴外骨骼机器人发展难点
在军事领域,针对提高单兵作战需求,目前现有的军用外骨骼系统综合助力效果不明显,单兵体能消耗并没有得到有效减少,而且当前可穿戴外骨骼机器人大多十分笨重,难以在较为复杂的地形环境下进行有效移动。另外,人机交互机制的不成熟造成穿戴舒适性、人机协同控制性较差。在民用领域,当前外骨骼机器人有着难以完成较复杂的动作、对于患者的主动适应性较差、实际应用中信息提取与交互能力较弱、成本高昂和难以大范围推广等缺陷[24]。因此,当前可穿戴外骨骼机器人面临的挑战与难点可以概括为安全可靠的控制、穿戴者与装备间的有效交互、装置的主动适应性、装备的轻量化、长时间续航及智能化等问题。
4 结束语
可穿戴外骨骼机器人要求系统具有高度的人机相容性与交互性,从科学研究的角度看,针对当前可穿戴外骨骼机器人研究的技术难点与瓶颈,包括人机耦合、人体运动信息识别、自适应性和安全控制等技术点仍需不断突破,科研人员在新材料、新传感和新驱动等方面仍需展开深入研究,以完善外骨骼机器人的短板。从发展趋势来看,可穿戴外骨骼机器人的轻量化、集成化、高效驱动与同步控制具有非常广阔的前景,目前在能源技术尚未突破的基础上,完善控制系统与驱动系统,使之更加拟人化与高效,对提高人机交互水平与适应性有着良好的促进作用,相信在社会多方努力下,定能推动外骨骼机器人的产学研合作,加快外骨骼机器人在军事、民生等领域的应用。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代临床医学(2022年4期)2022-09-29
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
发明与创新·中学生(2018年10期)2018-10-15
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19
工业设计(2016年6期)2016-04-17
中国医疗美容(2015年2期)2015-07-19
中国医疗美容(2015年1期)2015-07-12
