鲸豚动物吸附式声学行为记录器综述
2023-03-17 13:03刘凇佐王蕴聪孙鹏楠殷敬伟
水下无人系统学报 2023年1期
刘凇佐 ,王蕴聪 ,青 昕 ,段 悦 ,孙鹏楠 ,殷敬伟 ,乔 钢 *
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨,150001;2.工业和信息化部,海洋信息获取与安全工信部重点实验室(哈尔滨工程大学),黑龙江 哈尔滨,150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨,150001;4.中山大学 海洋工程与技术学院,广东 珠海,519082)
0 引言
鲸豚动物广泛分布于海洋中,目前全世界被发现的鲸目动物已有90 余种[1]。鲸豚动物可利用声信号进行交流、觅食、躲避天敌与感知环境。例如: 齿鲸发出的回声定位信号具有宽频带、窄波束等特性,与下颌处的接收系统构成了一套功能强大的生物声呐系统,实现水下回声定位探测觅食功能;座头鲸通过制造螺旋气泡网产生声学屏障“围捕”鱼群;具有群居属性的鲸豚利用不同频率的调频式哨叫声信号,实现群体间的通信交流[2-4]。
研究鲸豚动物声呐可为改进人造声呐系统提供参考与灵感[5-6]。此外,基于对鲸豚动物生命活动、栖息分布、生理结构的探索与认知,相关研究成果可广泛应用于海洋观测、仿生通信探测、潜水及渔业活动、生态环境保护以及神经医学等领域[7]。
目前,对于野外自由状态的鲸豚动物,主要是通过目视或定点布放水下录音设备等方式研究生物声学行为[8-10],如Greeneridge 公司与希尔科普能源公司通过使用自主定向海底声学记录仪(directional autonomous seafloor acoustic recorder,DASAR)对弓头鲸受石油开采噪声影响的迁移行为开展了研究[11]。针对大型鲸豚动物,研究人员常使用远距离声学记录方式进行观测,例如声呐浮标、拖曳式水听器线列阵以及海底固定监听设备[12]。这些记录可以用来研究特定目标生物的行为规律、分布丰度、叫声信号类型以及声学参数等[13-14]。但这种固定式的观测方法跟踪距离有限,并且当研究个体背向录音设备或游离设备监听范围时,则难以持续跟踪观测鲸豚动物,无法获取其全面的声学和行为信息[15]。
对于圈养的鲸豚动物,在圈养条件下的奖惩机制和各类训练方法的帮助下,鲸豚动物与饲养员可以建立合作关系,这有助于在圈养环境中布放各类监测设备[16]。但在圈养环境下的研究结果与野生环境存在较大的差异,诸如陌生环境感知、大规模迁徙、合作捕食、种群内部与群间社交、深潜活动以及跨物种社交等相关研究无法在有限的圈养条件下开展。
以上声学观测方法存在目标鲸豚跟踪困难、有效数据量少、信噪比不足、不确定性大以及数据源单一等问题。因此,鲸豚动物研究领域需要一种能够与目标建立稳定观测关系,且能获取多源数据的观测设备[12,17-18]。
为此,研究者们设计并开发了一种针对海洋鲸豚动物的小型吸附式声学行为数据记录器[17,19](也称为声学标签[20-21])。这种记录器装有多源传感器,集成了水听器、加速度计、全球定位系统(global positioning system,GPS)、陀螺仪、磁力计、压力传感器和温度传感器等,可吸附在鲸豚动物体表,以实现对鲸豚音频、运动和生理等数据的同步采集和记录,并自主储存在设备内。吸附式声学行为记录器具有流线型的耐压壳体,能够减小鲸豚游动时产生的水阻,同时抵抗由于鲸豚强大潜水能力带来的压力,在壳体底部采用吸盘将设备附着于鲸豚皮肤表面,当记录任务结束后,吸盘可由设备自主控制释放,以实现设备的回收。吸附式声学行为记录器整体设计如图1 所示。
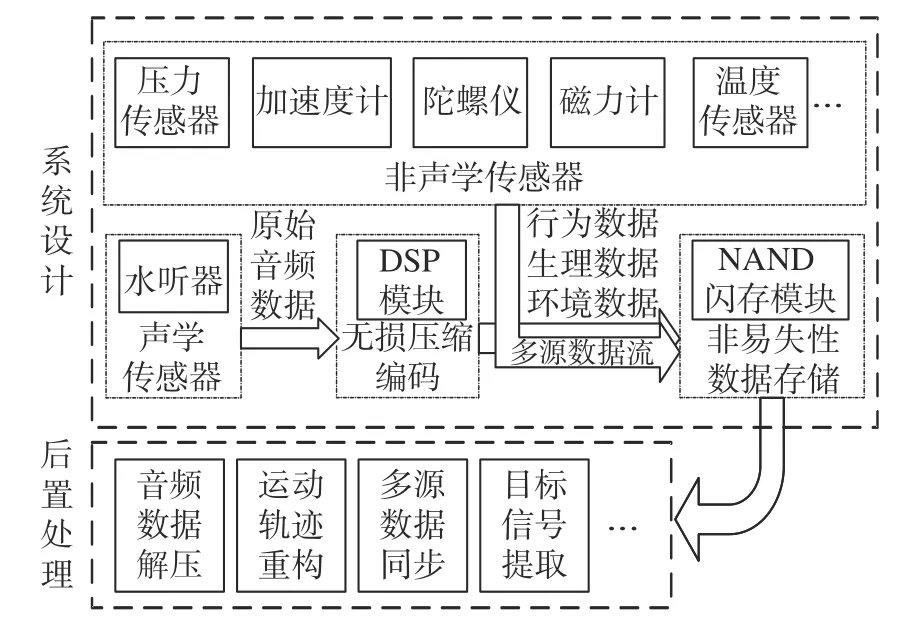
图1 吸附式声学行为记录器整体设计Fig.1 Overall design of the attached acoustic behavior recorder
由于鲸豚动物发声的频带很宽,记录器的存储容量有限,因此常对录制到的声学信号做无损压缩处理。非声学传感器数据作为生物行为和生理研究的重要依据,在后置处理中需要与声学数据进行时间同步。通过惯性导航算法、粒子滤波算法等处理加速度计、GPS 信号、压力计等传感器的信号,并重构目标生物运动状态以及航迹。此外,由于鲸豚动物声学信号相对时长非常短暂,且出现频率低,针对鲸豚动物叫声的自动检测和提取算法,如基于深度学习的叫声分类和提取算法等,也是重要的后置数据分析步骤。
如图2 所示,吸附式声学行为记录器附着于鲸豚动物皮肤上,实现对各类行为和声学信息的记录,它在鲸豚动物研究中扮演着非常重要角色。自1999 年Johnson 等设计出了第一代被称为DTAG[17]的设备以来,研究人员设计的多种版本的吸附式声学行为记录器正广泛应用到对鲸豚社交行为、生理活动和发声能力,甚至更广义的生物学、生态学和声学研究之中[22-25]。

图2 工作中的鲸豚动物吸附式声学行为记录器Fig.2 Working attached acoustic behavior recorder for cetaceans
吸附式声学行为记录器的应用覆盖了海洋生物声学研究领域的6 个具体研究方向[7]:
1) 鲸豚动物声呐和声音的产生机理研究;
2) 野外鲸豚动物的捕猎和运动行为学研究;
3) 通过声学信息对潜水呼吸器官的生理学原理研究;
4) 鲸豚动物的声音交流和行为生态学研究;
5) 人为噪音对鲸豚动物的影响研究;
6) 鲸豚动物被动声学监测研究。
目前参与鲸豚动物声学行为记录器开发和应用的研究机构主要有圣安德鲁斯大学生物学院生物声学行为记录团队、苏格兰海洋研究所海洋哺乳动物研究部门、加尔文学院数理统计系、圣安德鲁斯大学生态与环境建模研究中心与杜克大学海洋实验室等[26-27],美国海军研究办公室为这些研究机构提供了财政支持。随着越来越多的机构和企业投入到了对声学行为记录器的开发和研究之中。吸附式声学记录器版本仍在不断更新,总体发展趋势呈现小型化、长期化、多功能化和无害化,其外形也在不断更迭。
文中详细介绍了鲸豚动物吸附式声学行为记录器的系统设计、后置数据处理算法及常见应用场景,对国内外不同版本的声学行为记录器进行比较,分析这类设备能够解决的问题与面临的瓶颈挑战,并提出发展方向。
1 鲸豚动物吸附式声学行为记录器系统设计
鲸豚动物吸附式声学行为记录器尺寸一般为25 cm 左右,是一种小型信号记录设备,可以对鲸豚动物进行多源数据的贴身采集[17-18]。在使用时,通过专门的设备将记录器安装到鲸豚动物体表,记录器通过底部的吸盘或其他附着设备与鲸豚建立牢固连接。随后,记录器通过水听器对鲸豚动物进行长时间的录音,同时通过内部的姿态、运动、温度和压力等多种传感器记录鲸豚动物的状态数据,并存储在设备内部的闪存中。当设备电量耗尽、内部存储空间耗尽或者达到了事先设定工作时长后,设备将从目标体表脱离并浮出水面,同时主动发射无线电信号告知自身位置。
吸附式声学行为记录器具有流线型外部形状,安装有1 个或多个高频带水听器记录鲸豚动物叫声信号,底部根据附着能力需求的不同,安装有1~4 个亲肤材质吸盘,尾部为低密度的大浮力材质,且安装有信标天线以实现脱离生物后的回收。
1.1 适配鲸豚水动力学特征的壳体设计
总体来看,已有的几代声学记录器其流线型外形设计都遵循以下原则: 1) 降低水阻,减少流噪声;2) 产生一定的下压力;3) 使鲸豚动物感到舒适。
使用鲸豚动物吸附式声学行为记录器时,如果附着不紧密将导致记录器在鲸豚体表产生相对移动,这些相对移动在运动数据分析中表现为重现轨迹和姿态时的误差。这种误差将掩盖小尺度的运动,如游泳过程中的起伏与小幅度的转向等。鲸豚动物快速游动为记录器带来了大量的水动力干扰,这可能会使得设备提前脱离,因此需要多个吸盘固定以减少记录器在鲸豚体表的相对运动[28-29]。考虑到鲸豚最高可达80 km/h 的游泳速度与强大的变速、变向能力[30],有必要通过改良记录器壳体的流线型、引入流体动力学设计,来减少记录器带来的阻力,同时产生使得记录器贴紧鲸豚体表的下压力。Shorter 等[28]通过计算流体力学的方式模拟了3 种不同外形的记录器(如图3 所示)在一系列不同方向水流冲击下的流体动力载荷(如图4 所示),水槽验证结果显示,良好的流线型设计能使设备获得足够的下压力,能够在10 m/s 的相对流速下保持附着不会失效。
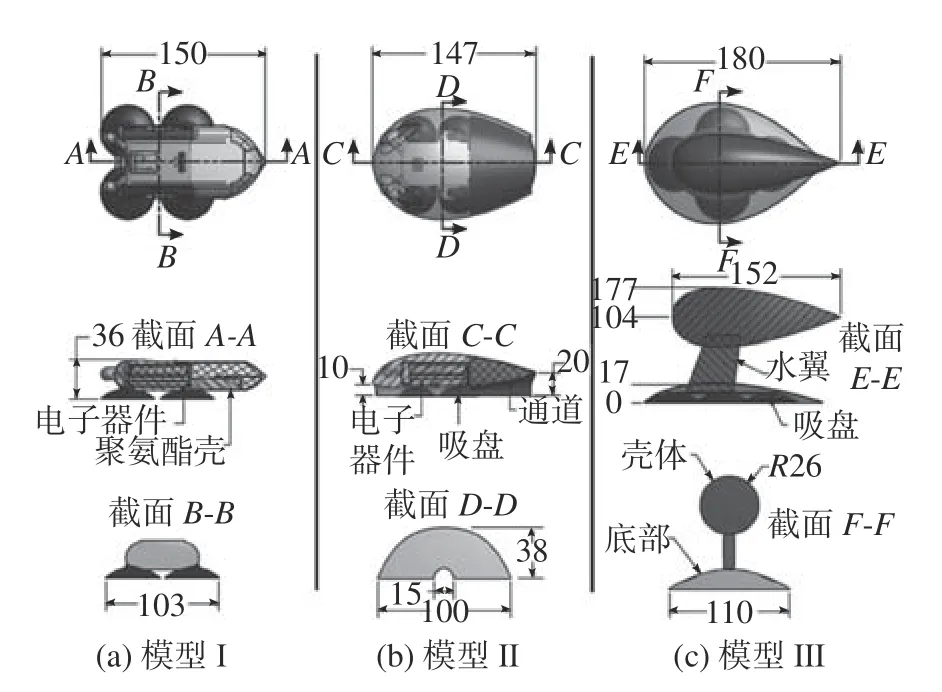
图3 3 种不同外形记录器设计图(单位: mm)Fig.3 Design drawings of three different shape recorders
除了流线型外,记录器的外壳还应当具有一定的耐压能力。有数据表明[31-32],抹香鲸的最大下潜深度约为2 km,此时对应的静水压力超过20 MPa,因此壳体面临的抗压能力十分重要。以应用最广泛的DTAG 记录器为例,该记录器的壳体为热成型聚乙烯材质,舱内的电路板被密封在环氧树脂中以平衡内外压力。
1.2 超低功耗多源数据记录存储系统
鲸豚动物声学行为记录器的首要功能是记录声音信号。水下的声电信号转换通过水听器进行,这是一种由压电陶瓷制成的圆柱体或球体传感器,置于记录器的前端。记录器的头尾朝向与鲸豚的头尾方向一致,能够有效避免由于自身遮蔽造成的接收声压级下降。
水听器的灵敏度与其直径成正比,高灵敏度的水听器甚至能够检测到低于前置放大电路本底噪声的微弱声音。但与目标声信号的波长相比,水听器的尺寸又必须足够小才能实现全指向性,这对水听器灵敏度上限提出了要求。压电水听器是电容性的,这一特性与前置放大器的输入电阻一起决定了记录器的低频响应。较薄的水听器有更好的低频响应,但往往耐压性较差。由于环境中的瞬态声音能量较高,低频段的灵敏度过大可能导致采集电路过载。在设计鲸豚动物吸附式声学记录器时,应综合考虑这些因素,适配于特定的目标物种[33]。
若单纯记录声学信号会缺少发声时的环境信息和运动状态,作为补充,记录器内部还配备有压力传感器、陀螺仪、磁力计、加速度计、温度计、盐度计、心电传感器以及GPS 等其他传感器,以获取被标记生物的生理活动状态及其所处环境: 通过压力传感器可获取鲸豚动物的潜水深度;通过陀螺仪、磁场测量计以及加速度计的数据可以获得目标鲸豚当前的运动状态与朝向,通过惯性导航可对其游弋路径进行跟踪;通过温度计和盐度计能够获取当前所处海洋环境信息;心电传感器能够实时监测生物的生物电与心率频次[34-37],这在一定程度上反映了鲸豚动物的心理状态。上述非声学信号的采样频率远低于声学信号的采样频率,当对声学信号进行处理时,利用非声学数据可以实时恢复出发声时段的全息场景,进一步支撑开展相应的研究。
除了上述常见的传感器外,部分研究中还会集成其他传感器,例如: 磁场传感器可以用来配合鲸豚动物下颌处固定磁力材料的实验,以记录口腔的张合次数;光强传感器可以用来研究鲸豚动物行为与光照水平的关系;pH 值感受器和浊度感受器可用来衡量水体指标等。
通常鲸豚动物声学行为记录器中包括控制器和数字信号处理器(digital signal processor,DSP)。微控制器负责协同整个设备的传感器运行,保证数据采样是连续且不发生冲突;低功耗的DSP 用来对音频信号进行实时滤波与压缩。Johnson 和Tyack 最初设计的DTAG 记录器只有400 MB 的存储空间,同时具备一个0.5 MB/s的红外接口来对设备进行配置。在前文提到的压电陶瓷水听器的后端由前置放大器、抗混叠滤波器与模拟数字转换器(analog to digital converter,ADC)构成。动态范围是声学记录器的一个重要参数。记录器的动态范围定义为在不失真情况下能够录制到的最大幅值的声信号电平与宽带系统的本底噪声之间的分贝差异,根据动态范围可以确定表示每次采样样本的位数,而记录器需要较高的动态范围来同时捕捉当前附着鲸豚动物的发声与远处动物的音频信号。最早的DTAG 使用12 位的ADC,其采样率由程序控制,可在2~200 kHz 之间调节,当前置增益设置为12 dB 时,其动态范围从本底噪声的80 dB 到出现削波时的152 dB(参考声压1 µPa)[18]。随着技术的进步,这些模块的参数都在大幅度提升,这一点将在下文举例说明。
各个传感器获取的数据按照流传输的方式储存在NAND 模块中。NAND 闪存采用非易失性存储技术,即断电后仍能保存数据。对于电池容量有限、离线工作且非即时回收的记录器而言,这种数据保存能力尤为重要。NAND 闪存的封装设计在日益变小变薄[38],这意味着声学行为记录器的工作时长和记录带宽仍在进一步提升。
1.3 吸附装置与脱离回收装置设计
记录器与鲸豚之间的连接方式是影响研究质量的关键因素。出于对获取数据的真实性和数据量的需求,记录器的引入不应对被测试动物的正常生理和心理活动产生较大的影响。因此,记录器与测试动物之间的连接方式应当兼具牢固性与较小的伤害性。
常见的附着方式包含刺入式与吸盘类。最早期的声学记录器使用刺入表皮的倒钩与目标生物建立连接(如图5 所示)[39-40],有时也使用背鳍螺栓等[41],这种连接方式主要用于对表皮厚实、体型庞大的大型须鲸的长期观测。随着设备的成熟和生物伦理学的发展,这种具有伤害性的侵入式连接方式逐渐减少,吸盘连接成为了主流的部署方式。

图5 早期带有尖刺倒钩箭头的吸盘Fig.5 an early suction cup with a spiked barbed arrow
同时,受限于电池容量与内部数据存储空间,离线设备的工作时长有限。为了回收设备及其记录的关键数据,在工作寿命到期前,记录器将通过主动方式脱离附着的鲸豚动物。这种巧妙的解挂方式是通过电化学腐蚀实现的。在记录器硅胶吸盘的顶端有使用镍铬合金丝系紧的细管,当电量、存储空间或工作时长达到预先设计的限制时,镍铬合金丝接通电源,作为电解池的阳极不断失去电子,进而快速腐蚀断裂。被系紧的细管失去束缚,导致海水在压力的作用下流入吸盘的内部,失去负压的吸盘即刻从鲸豚动物体表脱离。记录器尾部采用浮力较大的低密度复合泡沫作为浮力材料,这是一种在环氧树脂基质中添加充气玻璃球构成的材料,可使记录器的浮心偏向设备后端装有天线的部分。在浮力的作用下,记录器快速上浮并以尾部天线向上的姿态漂浮在海面上。尾部天线在预设程序的控制下发射甚高频无线电信号,研究人员即可通过信号强度实现设备回收。
1.4 吸附式声学记录器的布放
鲸豚动物吸附式记录器的布放难度极高: 由于鲸豚动物出现的海洋环境往往比较恶劣,对电子设备并不友好;而且布放时野生鲸豚对布放人员往往处于不配合甚至是规避的状态;再者,由于鲸豚动物极快的游泳速度,布放记录器的窗口期极短,且随机出现。针对上述情况,Kleivane 等[42]设计了一种专门用来向不受控的鲸豚动物目标发射声学记录器的气动装置,称为空中远程标记系统(aerial remote tag system,ARTS)(如图6 和图7 所示,图6 中,左图为装配好DTAG3 的ARTs,中图为不同的DTAG 设备,右图为部署过程实拍),这种装置通过气压驱动,发射压力设置为能够满足吸盘附着需要的同时,不会对目标鲸豚带来较大的刺激。该系统有效作用距离约为5~20 m,既能用以部署常见的吸附式声学记录器DTAG,也可用来发射刺入式记录器。这种设备出现之前,各类记录器的布放是通过长达数米的悬臂长杆通过拍击目标动物的方式完成的(如图8 所示)。随着近年来无人机技术的成熟,逐渐出现了利用遥控无人机吊放部署记录器的方式。

图6 用来布置DTAG3 的ARTs 套件Fig.6 The ARTs kit used to set up DTAG3

图7 ARTs 气动发射套件测试实拍Fig.7 ARTs pneumatic launch kit in testing

图8 吸附式记录器传统布放方式Fig.8 The traditional laying mode of the attached recorder
2 鲸豚动物声学行为数据处理关键技术
吸附式鲸豚动物声学行为记录器以高采样率获得高质量的鲸豚动物声学信号,同时以较低的采样率获得加速度计、陀螺仪等姿态传感器的数据。这些数据流需要在设备端同步存储并进行处理,提取出可供研究的无损音频信号,并重构发声时鲸豚动物的朝向、深度、运动趋势以及运动轨迹等信息。
2.1 宽带音频数据低功耗压缩技术
大量的音频数据需要压缩以提高存储效率。数字量化后的声信号本身往往包含两部分可供去除的冗余量: 第一,大量的低电平信号不能占满完整的数字动态范围,因此使用等长的字段编码时会产生大量的无信息段;第二,与采样相比,音频信号是慢变化的,其样本间往往具有一定的相关性,这部分可预测的样本应当被滤除。传统的无损音频压缩编码(free lossless audio codec,FLAC)、WavPack 等压缩算法尽管能取得很好的压缩比,但计算开销大,对于声学记录器内部低功耗的嵌入式处理器而言并不适用。在这2 种思想的指引下,国外学者利用海洋环境下鲸豚声信号本身的特征,提出了一种被称为X3 的适用于声学记录器的音频数据编码方法来实现数据压缩[43-44]。
2.1.1 海洋环境下的鲸豚声学信号特征
鲸豚动物具有极宽的声学收发频带,如瓶鼻海豚的听觉带宽范围为100 Hz~150 kHz;虎鲸的最佳听力阈值可达34 dB/µPa[45-46];海豚能发出频率为250 Hz~200 kHz 的高频窄脉冲嘀嗒声(click)、时长为十分之几秒到几秒的持续调频哨声(whistles)以及猝发脉冲声(burst pulses)等3 类声信号,其中最常见的click 信号峰值强度可达230 dB/µPa[47]。这对声学记录器的频带响应宽度提出了较高要求。
水下录制到的声音其主要成分是风浪声和雨声,在来往频繁的航线附近也有持续不断的轮机声[48-51]。与之相比,研究人员感兴趣的鲸豚动物叫声尽管声源级高,但其出现频率通常很低。因此,在对鲸豚动物录音进行压缩时,关注的是如何对占空比较大的海洋背景噪声进行压缩。
此外,由于声信号的频率越高,在海水中衰减的程度越大,系统接受到的声信号成分也随之变化,例如当频率升高到10 kHz,系统噪声来自电子元件产生的散粒噪声和约翰逊噪声;当频率大于10 kHz 后,量化噪声成为了主要干扰;在30 kHz 以上的较高频段,海洋中的背景噪声信号的能量占比极低,基本不会被记录到;当鲸豚动物贴近水面快速游动时,还会因海流波浪产生高频空化噪声。因此,从压缩的角度看,海洋环境下的鲸豚声学记录器接收到的声信号可以分为: 几乎以短时脉冲形式出现的宽频带鲸豚目标声信号、缓慢变化低频的海洋背景噪声信号以及鲸豚目标快速游动时产生的高频空化噪声。这种信号特征为低复杂度的音频数据无损压缩算法提供了思路。
2.1.2 低复杂度音频数据无损压缩算法
声学行为记录器的宽带采样音频需要压缩,但对声信号进行压缩不应消耗过多算力,否则会影响设备工作时长。研究人员希望得到系统记录带宽内真实的声信号,因此压缩算法应当是无损的。
无损压缩储存的压缩算法一般包括滤波和编码2 个部分。通常连续采集的信号样本之间是相关的,即后一个样本中存在可由前面样本预测的部分。滤波器通过移除该可预测分量,使残差信号的幅值更小。针对输入信号的频谱具有时变特性,大多数压缩方案采用自适应滤波器来实现更好的压缩效果。为了实现解码,滤波器应当是稳定可逆的,自适应滤波器的系数需要随着残差数据一同提供给解码端。出于对算力的节省,X3 编码采用1 阶差分代替自适应滤波器来获得信号残差。在测试中,1 阶差分对冗余信息的过滤效果已经足够,使用更高阶的差分对压缩比的提升有限。
当残差信号的平均功率已足够低时,可采用较短的二进制编码表示。在理想编码器中,编码长度应该反比于被编码值出现的概率。在没有先验知识的情况下,增加编码长度较为复杂。按照海洋环境背景下鲸豚动物声学信号的特征,Johnson等[43]提出了X3 压缩编码方法,使用统计学和实验的方法人为预设了编码器的划分门限,省去了部分算法自适应编码时一边读取数据一边丰富先验知识的算力开销,实现了较好的数据压缩效果。X3 算法的压缩比视不同样本而定,使用居维叶喙鲸、抹香鲸、座头鲸等DTAG 记录到的真实海洋背景下的鲸豚音频数据集对算法进行测试,X3 的压缩比基本维持在3 以上,与FLAC、WavPack、PPMd、GZIP 等算法进行横向比较,与X3 算法压缩比相差不大。使用采样率分布在16~240 kHz 的海洋生物录音对压缩算法进行测试,X3 算法以较低的算力实现了FLAC 等复杂方法87%的压缩效果,而只需要10%的处理操作,从而在低功耗的DSP 微处理器上实现了不到1 mW 的功耗。这在功耗只略有增加的情况下可将录音时长增加近3 倍。
此外,节省存储空间的方案还有基于事件检测算法的非连续记录模式,例如在某指定时刻或时间段记录;由传感器监测到某类事件时触发记录;按照事先设置检测算法使得记录器只存储特定的某类声音[52-54],但这些方法无疑会遗漏微弱或意外的声音。
2.2 基于姿态传感器的鲸豚动物运动状态重构算法
研究鲸豚动物的活动过程需要使用陀螺仪、加速度计和磁力计等传感器通过姿态运动重构算法描绘鲸豚动物的姿态、运动状态和路径轨迹。
出于简化目的,将鲸豚动物视为无关节的单一形状刚性体,记录器测得的数据可被认为是其质心运动数据。鲸豚动物在活动中包括进退、横移、升沉3 个平动自由度,以及横摇、纵摇和偏航3 个转动自由度(见图9)。平动和转动分别求导可得到速度和角速度,进一步求导则得出加速度和角加速度。在重构之前,首先定义左手原则下的4 个坐标系以供换算。
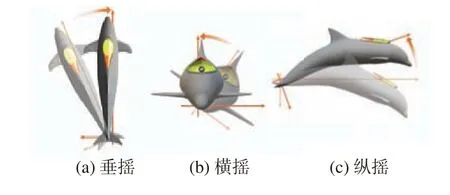
图9 鲸豚动物运动状态示意图Fig.9 Motion state diagram of cetaceans
1) 传感器坐标系: 记录器内传感器轴向构成的框架。
2) 记录器坐标系: 定义记录器的朝向,以确定正向与反向。
3) 动物坐标系: 动物基本轴线,给出动物的前后、中心和侧翼、腹部和背部。
4) 导航坐标系: 中心与动物质心重合,3 个轴向分别指向地理意义上的北方、东方和上方。
将加速度按时间积分,结合陀螺仪读取的角度构成的欧拉角数据,即可粗略还原鲸豚运动的状态。
运动是时间和空间上的连续过程,虽然使用记录器观测的采样率非常有限,但仍可以通过惯性导航或惯导结合参考位置的融合导航方法给出动物的相对位置和绝对位置。利用准确的初始位置信息以及不断获取的方向信息和速度信息,可以得到鲸豚运动的伪航迹图[55](见图10)。结合锚定好的准确位置信息,利用隐马尔科夫模型(hidden Markov model,HMM)或状态空间模型(state space model,SSM)即可通过预测的方式重建运动轨迹。需要注意的是,尽管存在GPS 信号或有参照物的目视信号作为位置参考,可以使用卡尔曼滤波的方式对航迹进行修正,但在2 次修正之间的伪航迹图仍然会累计误差[56]。
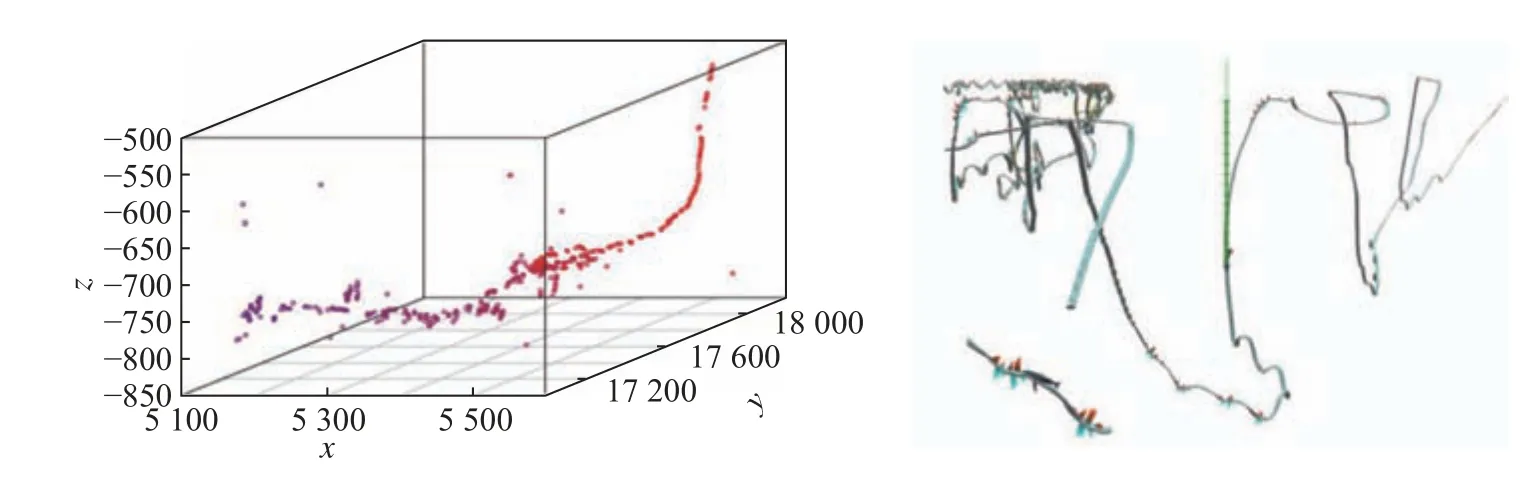
图10 使用惯性导航算法根据传感器数据重构的伪航迹示意图Fig.10 Schematic of a pseudo-track reconstructed from sensor data using inertial navigation algorithms
上述被称为惯性导航的无源导航算法在声学跟踪和鲸豚动物运动学分析中具有巨大的研究潜力,随着功耗更低、精度和采样速度更高的传感器件的出现,关于方向、姿态和轨迹重建的研究在消减累计误差方面将会取得进一步的性能提升。
3 国内外声学行为记录器发展及应用概况
国内外的生物声学行为记录器从产生至今已有20 余年,版本众多,包括通用性成品设备以及针对性设计的定制设备。事实上,每一种声学行为记录器并不会安装全部种类的传感器。这是因为受目标研究生物的体型影响,记录器设备的尺寸不同,其电池容量也不同。多传感器意味着更大的耗电量,这对记录器的工作寿命有一定影响。而由于研究人员对设备记录数据预期的差异,同样的传感器在不同的记录器版本中往往也被设计成不同的参数,如不同的采样率、分辨率、频带范围和工作周期等。各类记录器传感器配置见表1。
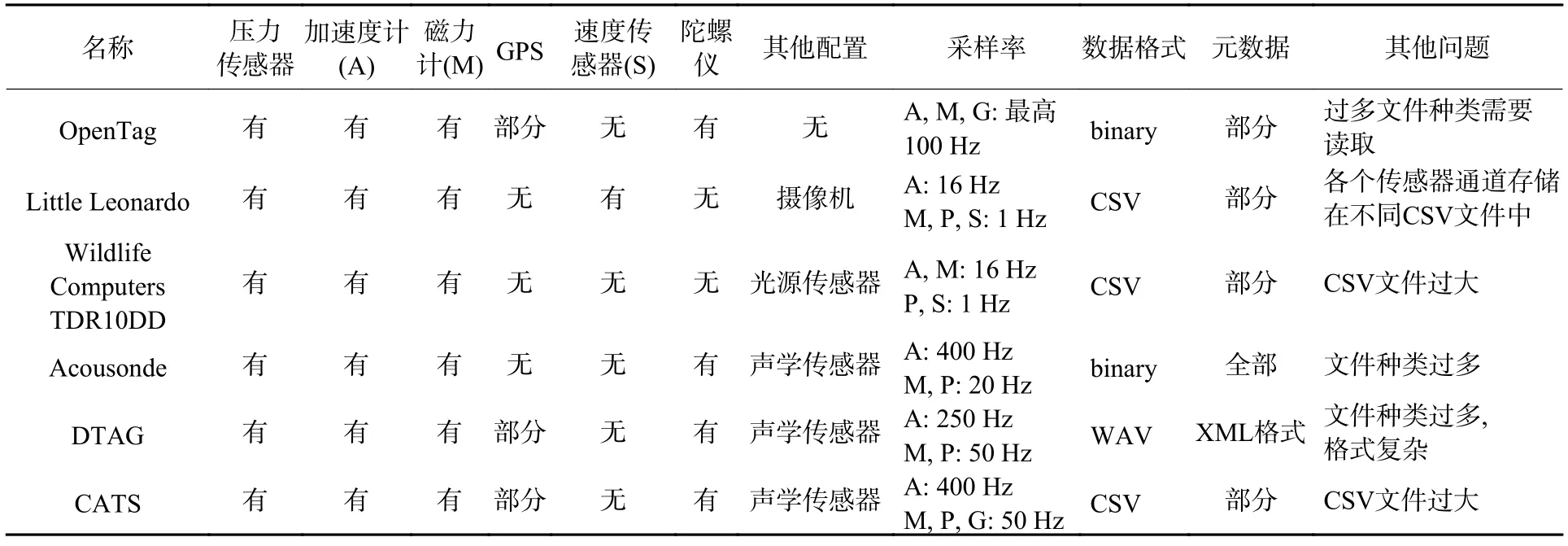
表1 各类记录器传感器配置一览表Table 1 List of sensor configurations for each type of recorder
目前主要使用鲸豚动物声学行为记录器进行生物研究的机构有京都大学研究生院信息学研究科社会信息学系生物圈信息学实验室、东京大学生物记录科学项目、圣安德鲁斯大学生态与环境建模研究中心、斯坦福大学霍普金斯海洋站戈德博根实验室、圣安德鲁斯大学海洋哺乳动物研究小组、北海道大学研究生院水产科学研究科海洋生物资源与环境科学学科的海洋生态研究所渡之实验室,以及名古屋大学行为和生态学尤达实验室等[57-60]。
下文不仅列出鲸豚动物吸附式声学行为记录器,由于部分针对鸟类、陆生动物和鱼类的穿戴式记录器与其具有相似的设计思路与功能,故也列举出来以作参考。
3.1 DTAG
DTAG 是目前最成熟、应用最广泛的鲸豚动物吸附式声学行为记录器,由圣安德鲁斯大学和伍兹霍尔海洋研究所开发,可用于座头鲸、北大西洋露脊鲸、抹香鲸、领航鲸、蓝鲸、灰鲸、布氏喙鲸和居维叶喙鲸等几乎所有大型鲸豚动物。DTAG通过底部自带的吸盘附着于海洋生物体表以记录声学、生理或行为信息。在实际使用中,DTAG 不仅可以记录所附着鲸豚动物的叫声信号和运动行为信息,还可以记录其周围的鲸豚动物叫声、船舶噪声和海洋环境背景噪声。
DTAG 版本共有3 个,分别是1999—2002 年使用的DTAG-1,2002—2012 年使用的DTAG-2,以及2012 年至今使用的DTAG-3(见图11,图中从下到上依次为1,2,3 代设备)。3 代设备的尺寸逐代减小,功能也不断增加,DTAG-3 版本的设备长度约为39 cm,如果不包含天线则长度仅有16 cm。
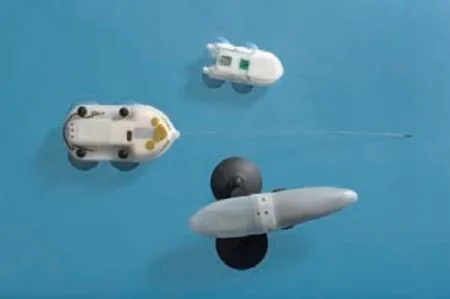
图11 不同版本的DTAG 设备Fig.11 DTAG devices of generations 1,2 and 3
DTAG 内部硬件包括: 锂离子可充电电池、DSP、深度(压力)传感器、温度传感器、音频采集电路、前置放大器、抗混叠滤波器、ADC 以及运动传感器(包括加速度计和磁力计)、64 GB 闪存。其主要外部器件如表2 所示。
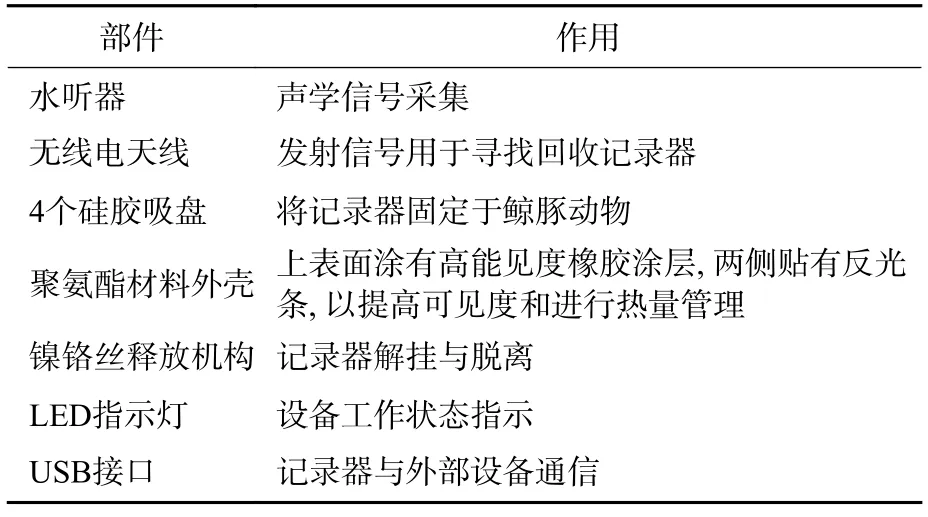
表2 DTAG 主要外部器件及说明Table 2 DTAG main external parts and descriptions
根据美国海军海洋生物资源项目报告显示,更新版本的DTAG-4 已在制作之中。如图12 所示,该版本的DTAG 尺寸更小,容量更高,电池寿命更长,从外形来看,其水听器探头为2 个,这意味着该设备具有一定的阵处理能力。
3.2 Acousonde
Acousonde 系列吸附式声学行为记录器由美国Greeneridge Sciences 研制。分为Acousonde 3A和Acousonde 3B 两种类型,如图13 所示[61]。
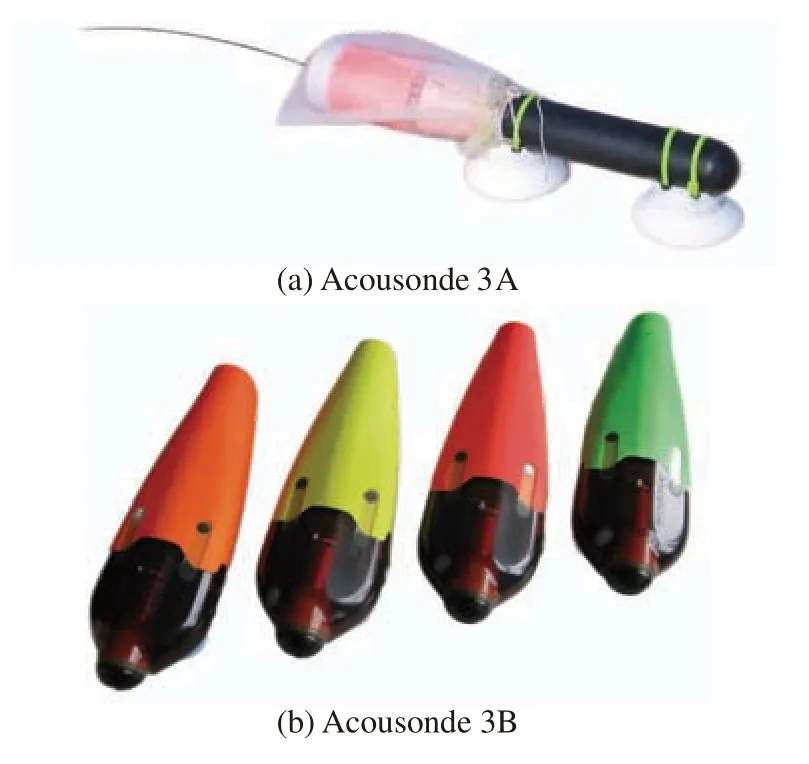
图13 Acousonde 实物图Fig.13 Photos of Acousonde
Acousonde 的主要应用集中于海洋生物的声学行为记录,其研究成果多为人致噪声对海洋生物活动的影响。2012—2014 年,使用Acousonde 3A 对香港大屿山东北部水域中华白海豚进行监测,评估了正在建设的港珠澳大桥施工阶段钻孔打桩活动产生的声景影响。2012 年起,Greeneridge Sciences 公司和格陵兰自然资源研究所合作,开始使用Acousondes 标记东格陵兰独角鲸[62]。
除此之外,该设备也被用于非生物研究领域,例如作为便携的声场记录仪、自容式海底声学信号和船舶噪声记录器,有时也将该设备用于长基线声学阵列的阵元,或作为水下航行器的声学、姿态、方位记录仪和拖曳线缆的实时姿态监视器。
在外设配置方面,Acousonde 3A 和3B 系列均配备有1~2 个水听器探头(其中1 个为可选的高频水听器)、倾斜传感器、深度和温度传感器、64 GB或128 GB 可选的闪存、红外发射口、可更换的ACELL 锂电池以及microUSB 连接口。但Acousonde 3B 系列记录器自带甚高频无线电发射模块。
在外形结构方面,Acousonde 3A 具有圆柱状的外形,直径为3.2 cm,长度22.1 cm,在海水中重约86 g。设备本身没有附着装置,需要单独装配吸盘或其他吸附、释放以及浮力回收装置。而Acousonde 3B 高度为4.2 cm,最宽处为7.9 cm,长度为22.4 cm,具有正浮力,在海水中的浮力大于50 g,且配有用户可自行置换的吸盘。
3.3 Little Leonardo 公司系列设备
Little Leonardo 是日本东京一家创新科学研究工具的制造商,主要提供小型、可靠的海洋动物行为研究数据记录器。该公司旗下主要有2 款产品,包括以记录深度(压力)、游泳速度、温度、3D 加速度、盐度(电导率)等传感器文本信息为主的ORI400 系列记录器,以及以记录视频信息为主的DVL400M记录器。这些设备广泛用于各种野生动物物种,如鱼类、鸟类、海龟、海豹和鲸鱼。
3.3.1 ORI 系列
ODR 系列记录仪包含3 款产品: ORI400-D3GT、ORI400/1300-PD3GT 及ORI400/1300-3MPD3GT(见表3)。其中ORI400-D3GT 集成三轴加速度计、温度和压力传感器,并配备可更换电池,在较高采样率的基础上具有紧凑的尺寸,能够下潜到水下400 m,可以用来记录水下动物,尤其是小型鱼类的行为数据。图14 为该设备附加到一个日本鲈鱼准备数据采集。

表3 ORI 系列产品Table 3 ORI series
ORI400/1300-PD3GT 型号记录器在ORI400-D3GT 基础之上增加了速度测量模块,并对外壳进行了改进设计,可选1 300 m 耐压壳体。ORI400/1300-3MPD3GT 在此基础上增加三轴磁场传感器,同样有可选的1 300 m 耐压壳体。
3.3.2 DVL400
DVL400(见图15)是Little Leonardo 旗下一款视频记录器,可以进行水下视频数据的采集及存储。根据不同的采集模式可连续采集2~5 h,同样可耐压400 m 水深。
图15 Little Leonardod DVL400M 记录器Fig.15 DVL400M recorder from Little Leonardo
3.4 Wildlife Computers 公司系列设备
Wildlife Computers 公司是美国的一家野生动物遥测方案供应商,旗下的声学行为记录器包括POP-UP 系列、SPOT 系列、SPLASH 系列、Daily Diary 系列以及TDR 系列等。
3.4.1 POP-UP 系列记录器
弹出式存储传输记录器(pop-up archival transmitting tags,PAT,也称PSATs)是一类针对非浮水生物的信息采集设备,如图16 所示,具有弹出式的释放功能,且支持卫星通信。记录器释放后浮出水面,并将记录到的数据传输到Argos 卫星网络。这类记录器被用于研究金枪鱼、鲨鱼、马林鱼、剑鱼、比目鱼、鳗鱼和海龟等动物。

图16 POP-UP 类设备Fig.16 POP-UP class device
3.4.2 SPOT 系列记录器
SPOT 系列记录器通用性高,适合应用于具有水面浮休习性的野生海洋生物。使用Argos 卫星定位系统对研究对象进行跟踪,可以近乎实时地实现250 m 精度的海上定位。
SPOT 系列记录器具有丰富的类型(部分产品见表4),形状和尺寸配置多达50 余种,附着方式包括吸附于生物皮肤表面、刺入式安装和固定于鲸豚背鳍处等。记录器内置UHF 无线射频模块,当记录器浮出水面时,设备以低功率发出无线电波“ping”信号,使用具有定向天线的接收装置可以实现对目标个体的定位和主动跟踪。设备还具有Argos 天线,定位也可以通过Argos 卫星实现。
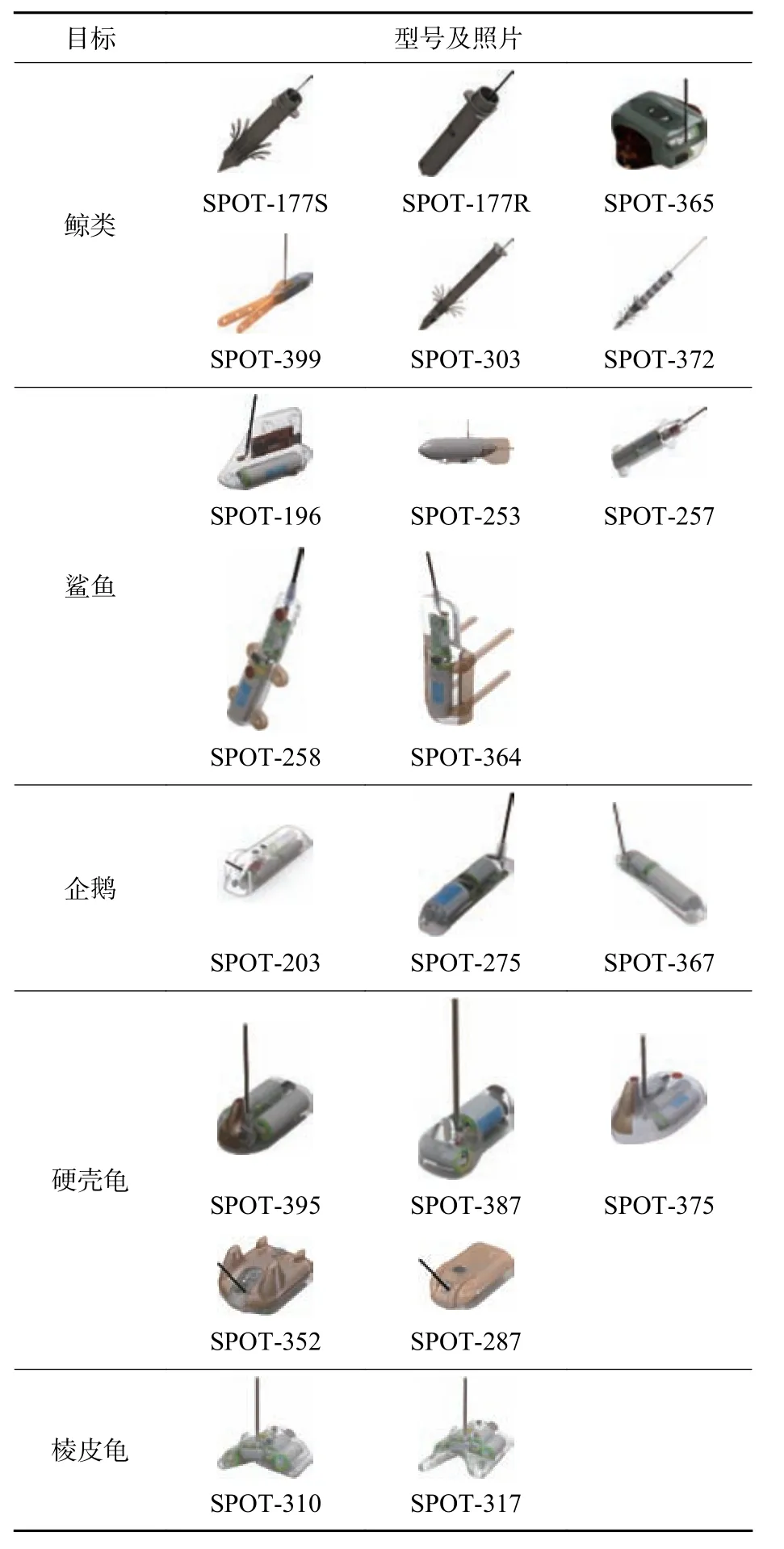
表4 SPOT 系列部分产品Table 4 Part of the SPOT series
3.4.3 SPLASH 系列
SPLASH 系列是一类高度可定制化的记录器,用于野生海洋生物运动信息的精密记录。部分海洋生物浮出水面的时间对于传统GPS 或Argos 系统而言过于短暂,而该设备使用的Fastloc 技术能够在短暂的时间窗口中获得高准确度的位置信息。与SPOT 系列相似,该系列产品线十分丰富,表5 仅列出鲸类使用的SPLASH 系列。

表5 SPLASH 系列部分产品Table 5 Part of the SPLASH series
3.4.4 Daily Diary 系列
图17 为Wildlife Computers 公司的Daily Diary系列记录器,它可以记录深度、温度、光、湿/干、加速度、磁场和速度等多种类型的数据。其三轴加速度计能够以32 Hz/s 的速度采样、三轴磁力计能够以8 Hz/s 的速度采样。Daily Diary记录器还具有速度测量功能,配合深度传感器,可以推导出海洋生物游泳速度的垂直和水平分量。
3.5 ROTAG
ROTAG 是一种用于海龟的声学记录器,由芝加哥动物学会的Reny B Tyson 等开发,装有3 轴加速度计、陀螺仪和磁力计来记录海龟的运动信息,1 个压力传感器来记录海龟的下潜深度,1 个水听器来记录海龟收到的声信号,2 个无线电天线用于寻找回收设备。研究人员使用该设备在巴西Paranaguá河口记录了幼年绿海龟的生活数据[63],设备布放如图18 所示。

图18 吸附在幼年绿海龟上的 ROTAG 及其细节Fig.18 ROTAG attached on a juvenile green sea turtle and its details
3.6 哈尔滨工程大学吸附式TAG
哈尔滨工程大学水声通信与网络技术实验室开发了一套针对鲸豚动物的吸附式声学行为记录器。该设备由硅胶吸盘附着于鲸豚动物体表,外观为流线型,密度为0.95 倍海水密度,具有正浮力。该设备包括1 个水听器及压力计、加速度计、陀螺仪、出水检测模块、GPS 与北斗定位等功能模块。水听器接收带宽为150 Hz~150 kHz,最高采样率大于500 kHz,信号动态范围为80 dB,具有256 GB 的存储空间,最大工作深度可达100 m,工作时长为24 h。该方案的具体建模和仿真图如图19 所示,其中图19(a)和(b)分别为鲸豚动物运动时吸附式TAG 受到水流升力与阻力随时间变化的仿真结果。当鲸豚动物以5.6 m/s 速度行进时,TAG 的稳态受力值在一个固定值范围内浮动,其中TAG 所受升力在75 N 左右,所受阻力在15 N左右。目前该记录器的外形仍在基于计算流体动力学仿真和水槽实验开展进一步优化。
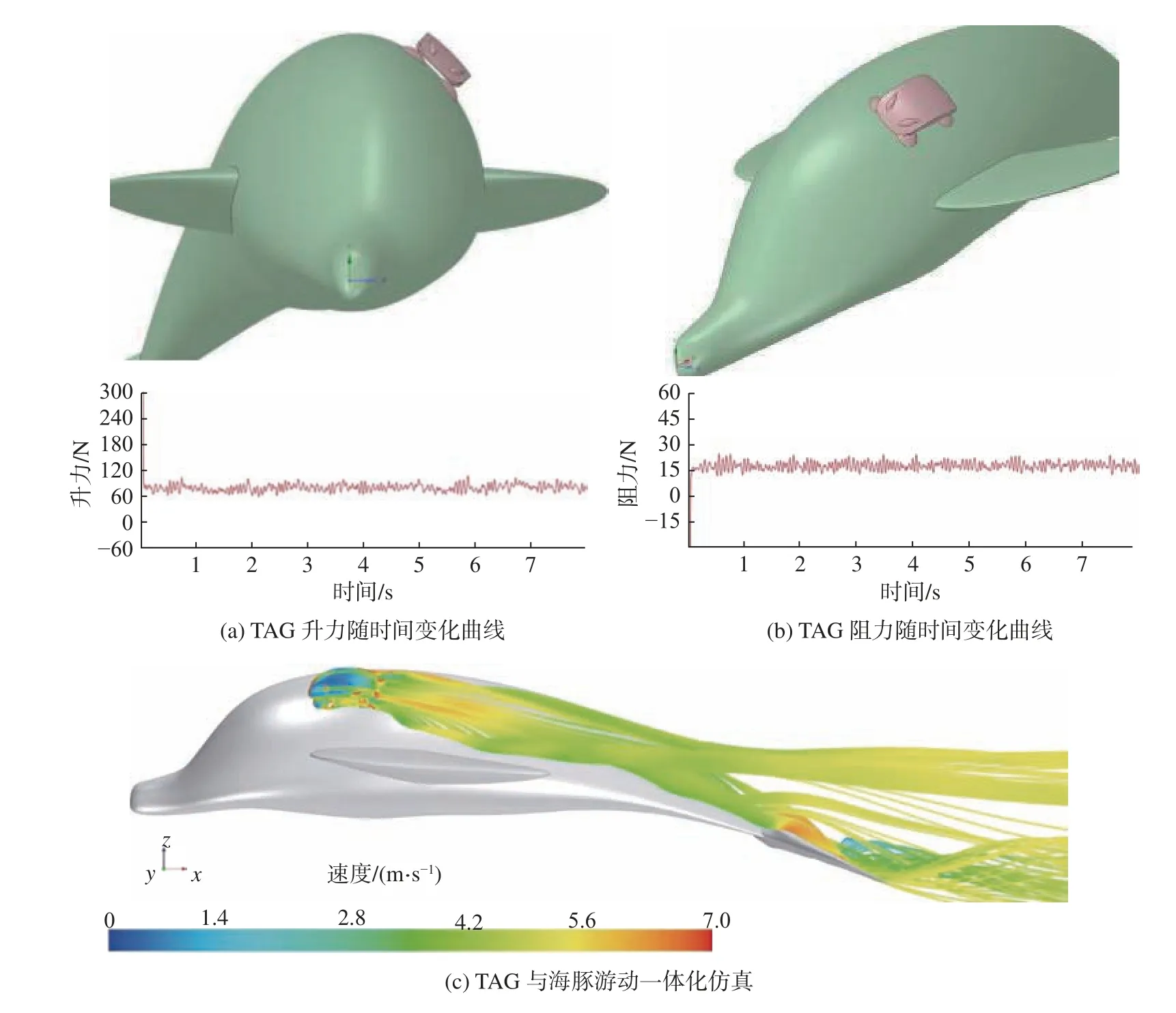
图19 哈尔滨工程大学TAG 方案建模与流体力学仿真Fig.19 HEU TAG scheme modelling and hydrodynamic simulation
4 吸附式声学行为记录仪发展趋势
近年来,随着国内海洋生物研究的发展,声学行为记录器从国外进口走向了自主研发。在未来的研究中,设备与技术的迭代升级仍是发展的重点。
1) 小型化。声学行为记录器应用于鲸豚动物,布放以及吸附不能对生物造成影响,因此设备整体质量以及体积大小设计需要综合考虑,并且壳体设计要考虑水动力学模型,确保水流阻力小、吸附方式牢,以保证生物友好性。
2) 长期化。伴随着微电子芯片的快速发展,声学行为记器硬件系统工作时长向着长期化部署的特点发展。当其工作寿命延长至数月乃至更长,对记录的海量数据进行检测与自动化提取等,更多的后置处理方法也将成为研究重心之一。
3) 多功能模块化。面对小型化以及多源数据需求,吸附式声学行为记录器模块化的多功能组件开发成为了热点。例如通过集成心电传感器对海豚心率进行检测,或集成水质传感器检测水体溶氧水平等。这些专业的功能模块服务于特定的研究,未来记录器系统将为这些模块提供通用接口,以实现快捷的定制生产。
5 结束语
文章介绍了鲸豚动物吸附式声学行为记录器的系统设计及其关键技术,概述了国内外各类、各型号记录器设备的研发现状。这类设备在鲸豚动物研究领域中发挥着重要作用: 设备以吸附的方式对鲸豚动物叫声、运动状态、环境背景噪声等多种信息进行实时同步记录,能够以较高的精度提供声学维度、运动学维度和环境学维度等多维数据。吸附式声学记录器极大丰富了生物学、海洋生物声学和海洋生态学等学科的数据来源,为研究的开展提供了有力的数据支撑,可进一步促进生物学、声学和仿生学等领域的研究发展。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
家庭影院技术(2020年6期)2020-07-27
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
汽车工程学报(2017年2期)2017-07-05
铁道通信信号(2016年10期)2016-06-01