基于结构光的压力容器封头尺寸测量*
2023-03-21 02:22李易凡
计算机时代 2023年3期
李易凡
(浙江理工大学机械与自动控制学院,浙江 杭州 310018)
0 引言
我国产品制造业的制造能力持续改善和加强,自2015 年国家全面推行“中国制造2025”战略以来,为了实现从制造业大国向制造业强国的转变,各行各业都在积极创新发展。压力容器[1]作为密闭容器,可以承受住一定的压力,一般用来装盛气体和液体,其在军工业、食品业、制药业、工业等领域有着举足轻重的地位。作为一种储存介质的容器,其端盖就是压力容器封头。如图1所示为压力容器封头实物图。

图1 压力容器封头
封头的尺寸标准可以参照GB/T 25198-2010[2],检测内容包括:封头的厚度、封头高度、封头内表面形状偏差、封头直径偏差、封头端面圆度以及封头直边尺寸要求。
传统检测方法有全样板检查[3],检测时首先需要将封头水平朝上放置,而后将样板对齐直边慢慢插入封头中,将封头直边与样板标注尺对齐后找出间隙较大位置人工用尺子进行测量。其测量的精度依仗封头全样板膜具的精准度,因此用于检测的样板精度[2]也是检验精度的关键问题。此测量方法中,封头全样板在测量过程种损耗较大,重复使用率并不高,且操作复杂。1991 年江苏南通市化工机械厂研发了一种封头检验用坐标测量仪[4],将坐标测量仪安装在封头开口的上方用其自带的横滑杆标尺手动对齐,每隔100 mm 设置一个测量点通过纵尺获得的数据减去封头直边到横尺中心的距离即为实测距离,再将数据与标准允许偏差进行比对即可。非接触测量中有基于激光测距仪的封头形状尺寸检测法[5],通过激光测距仪扫描封头内表面,通过椭圆拟合得到封头内表面形状偏差。目前基于机器视觉的封头检测法暂未有研究,基于结构光的机器视觉检测方法可以快速、便捷、准确的获取待测物体的表面信息,因此本文将研究设计一种基于结构光的封头尺寸测量方法。
1 材料与方法
本研究采用面结构光三维重建方法,对压力容器封头进行三维重建及尺寸计算,系统硬件由两个部分组成:投影部分和成像部分。
1.1 测量系统方法简介
本研究测量环境为海宁某压力容器加工工厂车间内,测量系统硬件中相机选择海康威视型号MVCE200-10GM 的以太网工业2000万像素CMOS相机,镜头为型号KOWA LM12HC 的12 mm 焦距工业镜头,投影仪型号为光米M3 的LCD 投影仪。本系统采用标准五步相移法[6]获取待测物体的包裹相位,并使用逐行列解包裹算法获取真实相位,得到真实相位差使用相似三角形法获取物体的高度h(x,y)的点云矩阵。并将左右两路视角下的点云进行拼接得到完整封头三维重建形貌。高度h(x,y)公式为:
其中,T 是投影正弦条纹的周期,d 是相机光心到投影仪光心的距离,L 是光心距参考面距离,Δ∅是采集的被测物体与参考平面的相位差,其求取公式为:
其中,φdef制后真实相位,φundef为背景板真实相位,由五步相移法获取包裹相位∅def及∅undef通过逐行列解包裹算法展开得到。包裹相位获取公式为:
本文使用五步相移法,因此N=5。
1.2 封头尺寸计算方法简介
最小二乘法作为拟合几何参数的主流方法,本文采用最小二乘法椭圆拟合对封头重建后端面点云进行内外轮廓拟合得到内外长短轴尺寸信息。设平面任意椭圆方程为:
设Pi为轮廓上N 个点,根据最小二乘原理,拟合的目标函数为:
设约束条件:
解方程可得形状参数(a,b)分别为长半轴和短半轴:
得出封头外直径Do,内直径Di表达式为:
厚度δn表达式为:
根据两点法求圆度,得端面外圆度Oo,端面内圆度Oi表达式为:
封头高度H表达式为:
2 结果与讨论
2.1 三维重建
将左、右双路视角点云进行筛选后,得到左右无阴影噪声影响的点云。如图2所示。
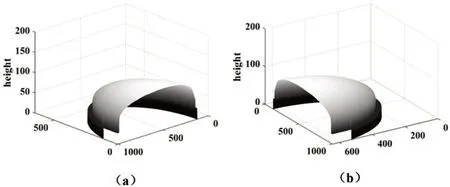
图2 (a)左路筛选后点云(b)右路筛选后点云
将左右视角点云拼接后的封头三维重建如图3所示。
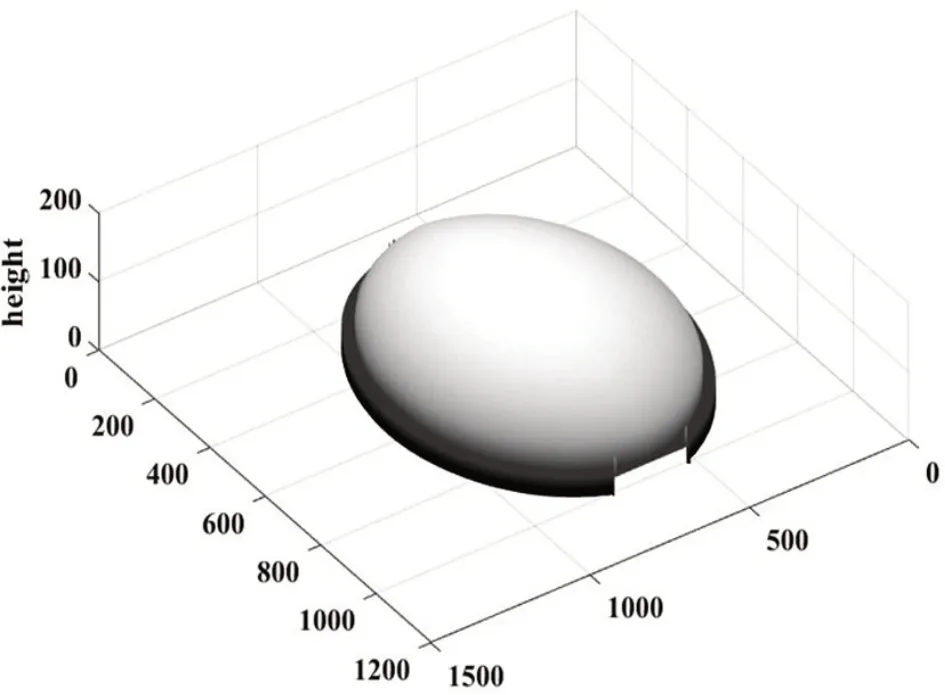
图3 拼接后封头三维重建
2.2 尺寸计算
为了便于使用最小二乘椭圆拟合,将封头的端面点云筛选出来如图4(b)所示,包含内外椭圆,轮廓提取后分别使用最小二乘拟合得到结果,ao为111.81mm,bo为111.56mm,ai为101.37 mm,bi为101.30mm,深度h为101.76mm;根据公式⑻得外径Do为223.37 mm 内径Di为202.67mm。根据公式⑼得厚度δn为10.35mm。根据公式⑽得端面外圆度Oo为0.25mm,端面内圆度Oi为0.07mm。外径误差εo为+2.34mm,内径误差εi为+1.67mm。深度H 为101.37mm。根据式⑾得高度为91.41mm。可以看出,在对于椭圆形、圆形的封头样件测量时,误差由于边缘条纹图案信息模糊,引起像素点外扩导致测量值偏大,下一小节将对封头物体系统误差进行追加实验分析。
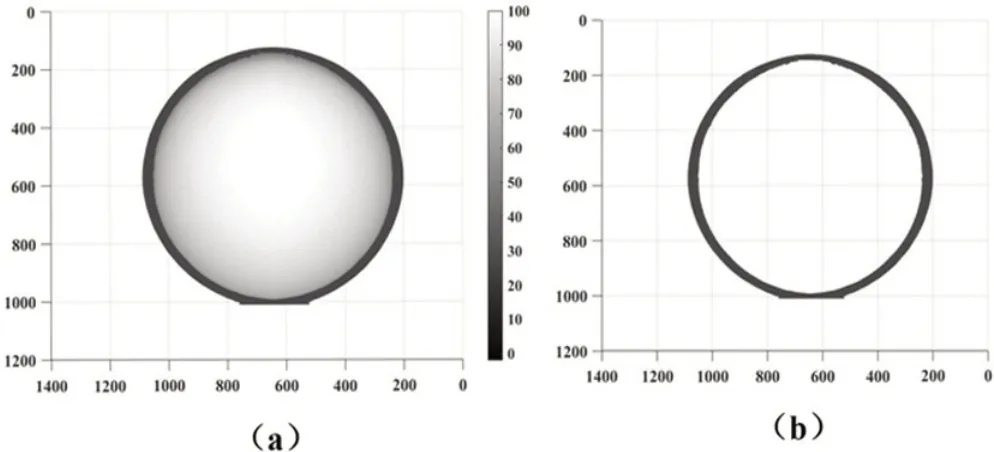
图4 (a)封头重建平面深度图(b)封头端面点云图
2.3 误差分析
封头端面为标准圆,可以通过线性拟合将系统测量误差校正,因此为了探究系统的误差关系,对7种尺寸封头进行3 次重复测量得到平均测量值如表1所示。
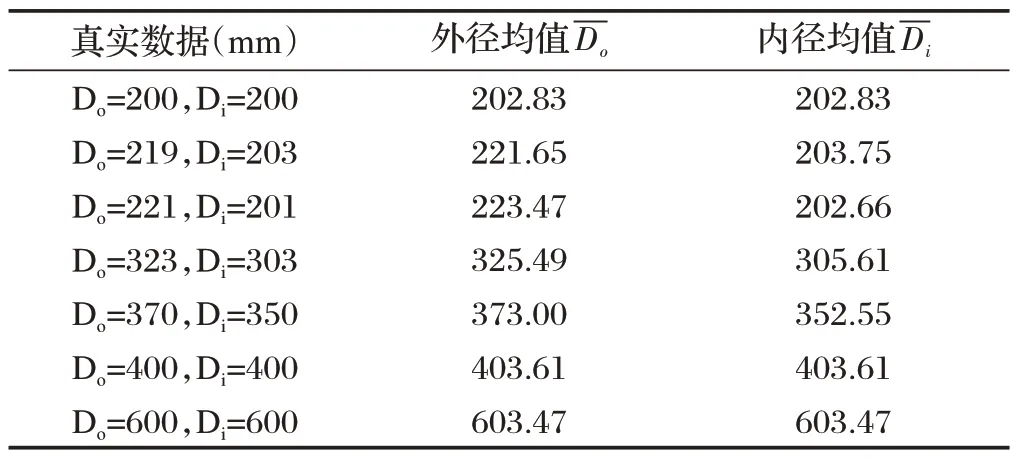
表1 7种模拟封头内外径平均数据
分别对内、外径进行一元线性拟合后得表2。

表2 内外径数据拟合参数
由表2得yo,yi:
将表1 中外径、内径带入式⑿,系统误差校正后测量值如表3所示。
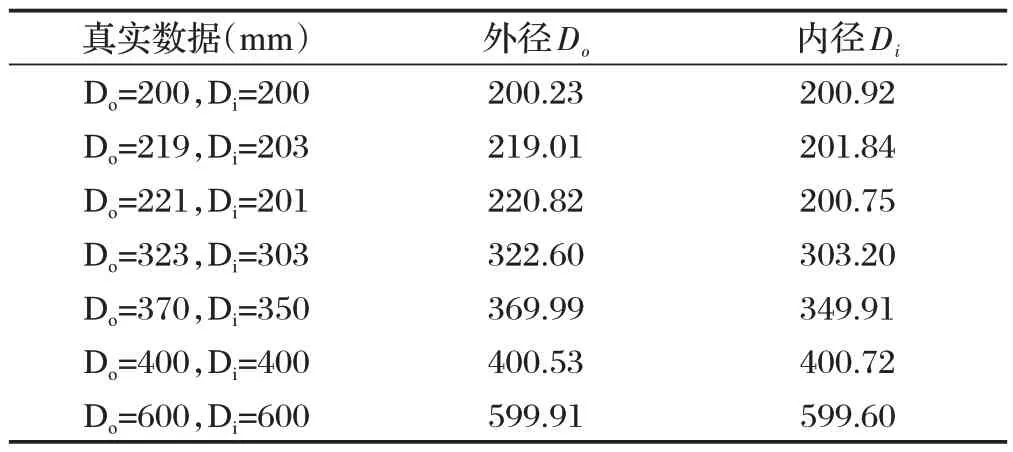
表3 内外径数据拟合参数
对校正后得系统进行均方根误差(Root Mean Square Error,RMSE)评价,计算得出外径内径的均方根误差分别为0.41mm,0.63mm。尺寸测量系统的性能较为优秀,校正后的系统内外径误差基本都在±1mm以内。
3 总结
本文设计的压力容器封头尺寸测量系统选用面结构光,采用标准五步相移法进行实验。在对封头进行实验中发现测量误差偏高,研究发现是测量封头物体时,由于其边缘问题使得还原边缘相对模糊,导致像素点外扩从而使得测量值偏大。为了解决此类问题对系统精确性的影响,对直径从200mm 到600mm的封头进行三次重复测量得到测量均值,将获得的内外径信息进行线性拟合,得到系统误差校正函数,经过误差校正后的系统测量误差在±1mm 以内,实验结果证明,本研究设计的双路结构光测量系统有较好的前景性。
猜你喜欢
建筑与预算(2022年12期)2023-01-09
建筑与预算(2022年10期)2022-11-08
河北理科教学研究(2022年2期)2022-09-17
石油化工设备(2021年4期)2021-07-21
今日农业(2020年13期)2020-08-24
人大建设(2018年11期)2019-01-31
橡塑技术与装备(2018年18期)2018-09-22
大型铸锻件(2015年5期)2015-12-16
中国塑料(2014年5期)2014-10-17
小说月刊(2014年11期)2014-04-18