
新一代静止气象卫星测定轨技术的发展研究
2023-04-19 03:21张志清王延光宋宝相
空间控制技术与应用 2023年1期
李 欢, 张志清, 王延光, 张 亢, 宋宝相, 曲 博, 韩 琳
1. 西安科技大学高新学院信息与科技工程学院, 西安 710109 2. 中国气象局中国遥感卫星辐射测量和定标重点开放实验室/国家卫星气象中心(国家空间天气监测预警中心), 北京 100081 3. 空间电子信息技术研究院, 西安 710100
0 引 言
中国新一代静止气象卫星——风云四号[1],包括光学和被动微波两种卫星.2016年12月11日,光学科研试验卫星成功发射(定点于东经105°),卫星携带多种观测仪器:多通道扫描辐射成像仪、干涉式红外大气探测仪、闪电成像仪和空间天气监测仪器.第二颗光学星风云四号B星于2021年6月3日发射成功,定点于东经133°执行业务观测任务.第一颗微波卫星预计2025年前后发射,主要装载覆盖从23.8~425 GHz频段的探测仪.
按照发展计划,未来将分别形成光学和微波双星组网观测的布局.为了保证观测业务的连续性,新的卫星会在工作卫星达到寿命之前被发射,经测试后处于在轨备份状态.此外,退出业务的卫星常常还具有部分功能,这些卫星仍然处于在轨状态.为了适应多颗新一代静止轨道气象卫星在轨管理需求,中国向国际电信联盟申报了7个空间频率网络,轨道位置(如图1所示)为:东经79°、86.5°、99.5°、105°、112°、123.5°和133°,东西跨度达到54°.
测距、轨道确定和预报(统称为测定轨)是航天器飞行控制和管理的基础,而用于遥感的静止气象卫星对测定轨需求还有其特殊性.首先,图像导航精度指标分配决定了测定轨的精度,远高于通常卫星轨道管理的精度要求;同时,静止气象卫星运行管理,如轨道保持控制后,快速恢复对地球观测作业,需要在很短的弧段内完成测定轨[2].

图1 中国新一代静止气象卫星轨道位置分布及5个地面测距站Fig.1 Orbital position distribution of China new generation geostationary meteorological satellites andfive ground ranging stations
中国的第一代静止气象卫星风云二号是从1980年代末期开始研发的,先后成功发射了8颗卫星.风云四号的发射和在轨运行,标志着静止轨道气象观测业务实现了升级换代.根据风云二号和四号静止气象卫星对测定轨的要求,研制了基于地面的测定轨系统.风云二号该系统采用双频和伪码测距的技术体制,由5个测距站组成[3],每个测距站装备了两套可以同时分别对两颗卫星进行测距的设备.
这种传统的基于地面的测定轨技术,在静止气象卫星发展中越来越表现出诸多问题和局限性.静止气象卫星采用GNSS测定轨成为发展方向.
针对使用GNSS测定轨给静止轨道气象卫星遥感业务带来的不确定性和潜在系统风险,本文进行了针对性仿真分析.
1 静止气象卫星测定轨技术发展
1.1 轨道参数在图像导航中的作用
气象卫星的主要任务是对云、大气和地表进行观测,因此,气象卫星观测的图像通常叫做云图.卫星观测得到的原始遥感数据先要经过导航处理,即把像素与地球上的目标位置一一对应起来.处理流程如图2所示,需要用到卫星的轨道根数、位置和速度等.

图2 卫星云图导航处理流程图Fig.2 Navigation processing flow chart of satellite cloud image
云图的分辨率越高,分配给轨道的精度要求越高,这也是风云静止轨道气象卫星需要不断发展专用测距定轨系统和提高其性能的原因.
对于陆地遥感卫星图像(关注地球表面而去掉云层覆盖的图像)定位偏差,可以采用地标导航的方法予以矫正,但这种方法不适用于气象卫星图像.地球表面平均有1/3~1/2地区覆盖着云层[4],高积云和气旋(台风)云系可达几千公里,云图中很难看见地标.实时生成的气象卫星云图定位精度需要高精度的轨道参数来保证.
1.2 风云二号静止气象卫星测定轨系统
风云二号静止气象卫星发展于20世纪90年代初.当时静止轨道卫星数量不多,轨道位置资源相对丰富,对卫星轨道管理的精度要求相对较低,通信卫星通常采用单站测轨即可满足轨道管理的要求.静止气象卫星的主要任务是获取地球云图,图像定位对测定轨精度的要求远高于卫星轨道管理对测定轨精度的要求.因此,与国际上拥有静止气象卫星的国家美国、日本等一样,我国静止气象卫星从第一代风云二号起,即建立了专用的地面测定轨系统.
风云二号卫星获取的图像包括可见光、中波红外和长波红外图像,可见光和红外图像的星下点空间分辨率分别为1.25 km和5 km.分配的定轨误差指标为空间600 m.
风云二号卫星的定点轨道控制精度要求为:东西方向±0.5°,南北±2.5°.东西轨道保持控制一般3个月左右进行一次,南北轨道轨控在卫星寿命期间进行一次.卫星轨道控制后,在24 h后达到图像定位精度要求.卫星采用自旋稳定姿态控制的方式工作,转速为100 r,姿态稳定度优于1.17 μrad/min.
根据风云二号卫星的工作特点和图像定位分配给轨道的精度,设计和研制的测定轨系统由地面测距站、卫星转发器和轨道确定及预报软件组成.3个测距站分别位于北京、广州和乌鲁木齐.北京是测距主站,广州和乌鲁木齐分别测距副站.设主站和2个副站到卫星的距离分别为R1、R2、R3.主站发射的测距信号经卫星转发回到主站,测得主站与卫星之间来回的距离2R1;此时副站也接收到卫星转发的信号,经过低噪声放大、变频和功率放大后向卫星发射,卫星二次转发回主站,分别测得主站和2个副站与卫星之间来回的距离:2(R1+R2)、2(R1+R3).设卫星在空间的坐标为(Xs,Ys,Zs),则有
Ri=((Xs-Xi)2+(Ys-Yi)2+(Zs-Zi)2)1/2
(1)
其中,(Xi,Yi,Zi)为3个测站的坐标,i=1,2,3.
影响轨道确定精度主要有:距离测量误差、测站分布与卫星之间的几何构型及卫星动力学模型误差.无线电测距,误差存在于信号传输和测量的各个环节.主要包括:1)传输误差,如卫星转发器时延、各测距设备时延、测距信号空间传播路径时延;2)接收机测量误差,如时钟误差、分辨率误差等.在测站布局和卫星动力学模型确定的条件下,距离测量误差控制成为测定轨的关键因素.经过综合论证,设计和研制的风云二号卫星测定轨系统技术难度和复杂度适中,可以满足图像定位的精度要求,该系统的主要特点为:
1)卫星测距的工作方式为长时间连续测量,除在3个月一次的东西位置保持控制和寿命期间的一次南北轨道控制后需要重新开始测定轨外,其它时段保持连续测定轨工作方式.
2)选用单一波段信号进行测距,电离层折射造成的误差,只能通过模型进行较粗的修正.
3)没有进行实时中性大气矫正.
4)没有配备对设备时延进行实时监测的零值测量设备.
1.3 风云四号卫星对测定轨的新需求
1.3.1 更高精度
新一代静止轨道气象卫星,采用三轴稳定姿态控制的工作方式,装载的成像仪具有可见光、近红外、中波红外和长波红外等十几个光谱通道,最高空间分辨率(星下点)为250 m.图像导航分配的定轨误差为空间50 m.
1.3.2 快速响应
新一代静止气象卫星除了日常测定轨外,还有快速响应的需求,主要有姿态机动(卫星调头和飞轮卸载)和轨道保持控制[5].
(1)卫星调头
为了获取高灵敏度的图像,红外传感器要工作在深低温中,通常采用辐射致冷的方法.因此,三轴姿态稳定的静止气象卫星采用单翼太阳能电池板结构,把与太阳能板安装面相对的一面用于安装辐射制冷屏.如图3所示,风云四号卫星太阳翼的对面留出来安装两台载荷的冷屏.为避免阳光照射冷屏,每年春、秋分都要对卫星做绕偏航轴进行180°调头的机动控制,使载荷的冷屏在夏季朝南,冬季朝北.
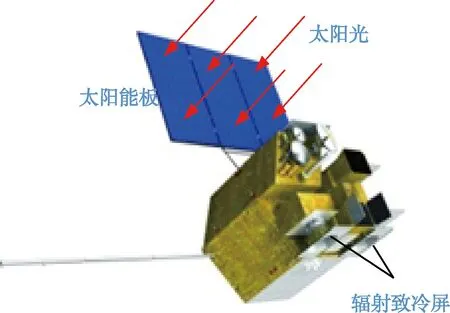
图3 风云四号卫星单太阳翼受太阳光压示意图Fig.3 Schematic diagram of single solar wing of FY-4 satellite subjected to solar light pressure
(2)飞轮卸载
卫星每天绕地球运转一周,但太阳能电池板通过与卫星的连接轴反向旋转保持朝向不变,即总是对着太阳(如图4所示),保证为卫星提供稳定的电能.由于持续的光压作用,对卫星产生姿态偏转力矩.为了保持姿态稳定,采用飞轮来吸收该偏转力矩[6].当飞轮达到或接近转速极限后,必须借助发动机喷气,将飞轮转速降下来.风云四号卫星每天都要进行这样的角动量管理控制,也称飞轮卸载.

图4 卫星运动中的太阳能板朝向Fig.4 Orientation of solar panels in satellite motion
(3)轨道保持控制
静止轨道气象卫星受地球非球形摄动、日月引力和太阳光压摄动作用会偏离定点位置,需要平均两周进行一次东西位置保持控制,半年进行一次南北位置保持控制.
无论是卫星调头,还是飞轮卸载和轨道保持,都需要卫星携带的发动机产生喷气动作.根据反作用力原理,这将带来卫星在空间位置的变化,即轨道改变.静止气象卫星获取的云图,因轨道的瞬时变化而未被精确及时测定,会出现定位偏差;精确测定轨是需要一定时长的,如果等达到精度要求后再进行观测,等待导致缺失较多的资料[7].而根据气象业务需求,风云四号卫星一项重要技术指标是卫星机动和轨道控制完成后15min启动观测作业,并确保图像导航精度.
因此,风云四号测定轨系统必须设计为与卫星工作模式相匹配的高时效系统,不仅要满足高精度要求,还要满足卫星运行所需要的快速响应要求.
1.4 风云四号静止气象卫星测定轨系统
为了满足风云四号图像导航对测定轨的精度和快速响应的要求,研制了新的测定轨系统(如图5所示).由卫星测距转发器和5个地面测距站(1个主站和4个副站)组成.
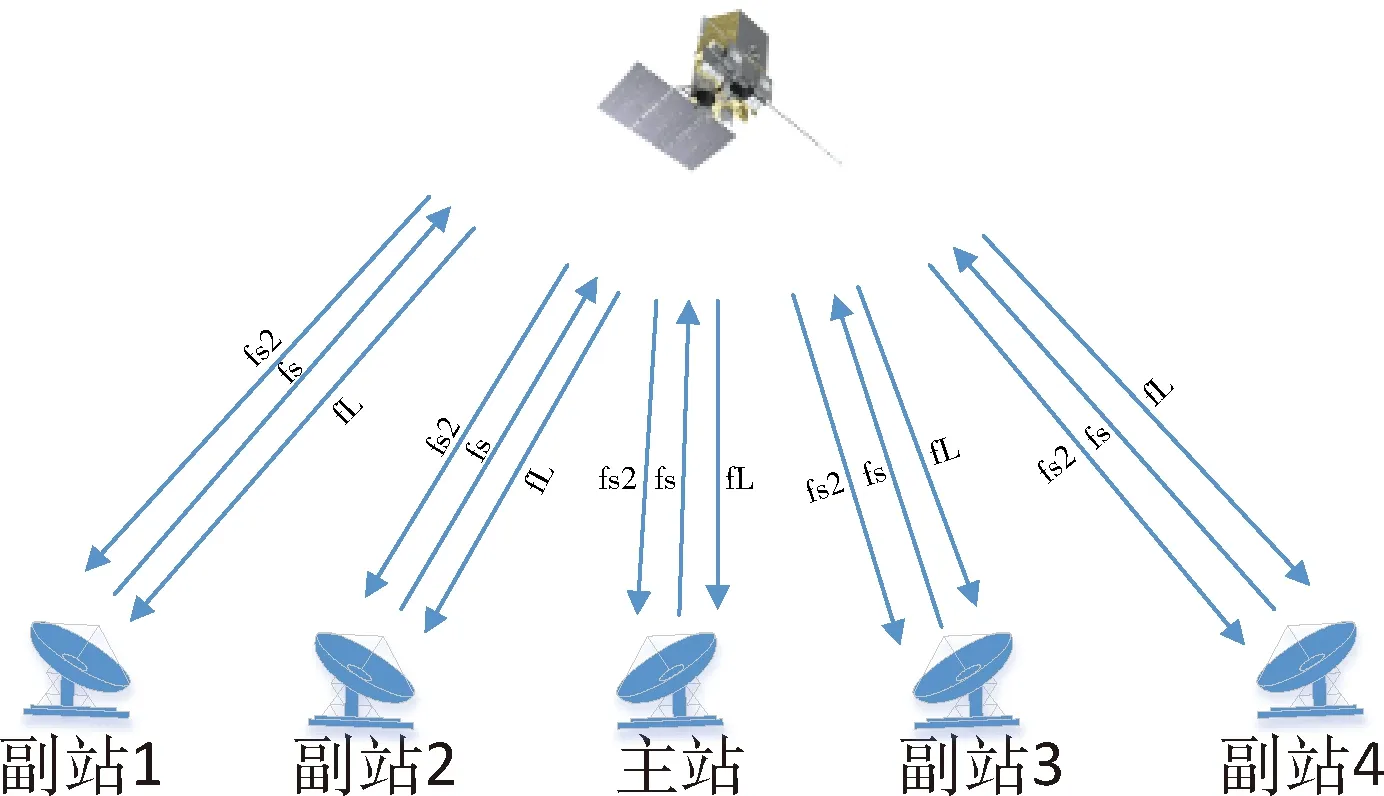
图5 风云四号卫星测距系统Fig.5 FY-4 satellite ranging system
这个系统的工作原理为,各测站将携带有各自地面站信息的测距信号以频率fS(S频段)发送至卫星;卫星将接收到的信号一路变频至fS2(S频段),一路变频至fL(L频段),然后转发回各测距站;测距站接收卫星转发的信号后,进行解调解扩,获取各站自发自收的测距观测量.主站在完成测距的同时,对各副站的测距信号进行解调获取测量值,包括副站到卫星之间伪距(S频段伪距Ri,S和L频段伪距Ri,L)和对应的时间码.
由图6可知,各测站到卫星的距离测量值如式(2)所示
2)
其中,Ri,S为第i个测站信号fS到卫星,以fS2从卫星回到该站的伪距观测值;
Ri,L为第i个测站信号fS到卫星,以fL从卫星回到该站的伪距观测值;
Ri,0为测站i到卫星真实距离值.对于同一坐标系下,卫星与测站之间的距离可以用式(3)表示
(3)


(4)
式(4)中,上行频率和下行频率都为已知量,只有ρi为未知量.
RS,sat、RL,sat为卫星转发器时延.对于S频段和L频段不相同,但是对于各个测站来说是相同的,因此这2个转发器时延为未知量.
对于一个测站来说,式(2)中2个方程有6个未知数,方程无唯一解.通过增加测距站来解决这个问题,增加一个测距站即增加1个未知数,但增加2个观测方程.因此至少需要增加4个测距站,才能使得观测方程方程个数与未知量个数相等,方程有解,但不唯一,根据卫星与地球的之间位置的先验值,可以确定卫星的具体位置.10个观测方程,包含10个未知量,如式(5)

(5)
通过5个测距站实时获取一系列卫星的空间位置,由动力学方法确定卫星轨道,其模型和策略如表1所示.

表1 静止气象卫星定轨模型及策略Tab.1 Orbit determination model and strategy of geostationary meteorological satellite
经过外符合性检验,风云四号测定轨精度优于30 m.与风云二号相比,风云四号测定轨系统的主要技术改进为:
1)对测距设备时延误差进行实时测量和矫正.
2)采用类似GPS双频测距消除电离层折射误差.电离层对不同频率的电波造成的折射相差很大.静止气象卫星单独使用的L或S频段,会造成几十米的误差.双频测距增加了系统的复杂度,但可以有效地消除电离层误差.
3)对于中性大气时延,配备多要素的自动气象站,进行实时矫正.
4)采用软件无线电新技术,减小接收机测量误差.包括时钟误差、伪码同步跟踪环路误差、数模转换的量化误差及码分多址带来的多路径效应误差等.
5)提高测距系统自动化程度,实现了卫星作业管理的高时效性要求.
2 面临的问题及发展方向
2.1 面临的问题
风云四号的五站测定轨系统在功能、性能上可以满足卫星云图导航和卫星运行管理的需求,但是,随着卫星的发展,面临以下问题:
1)不利于东、西双星主业务模式.为了满足气象事业发展需要和服务国家发展战略,未来规划以东经79°和133°的双星组网观测业务,也就是说东、西两端的卫星将作为主业务卫星,观测范围要覆盖大部分非洲、印度洋、亚洲、大洋洲和西太平洋.风云四号静止气象卫星的5个地面测站均部署在我国境内,从几何分布的角度,已近最佳布局.但是,对于位于印度洋赤道上空东经79°的卫星,这些测站均偏于东北侧;而对于位于太平洋赤道上空东经133°的卫星,这些测站则偏于西北侧.这种测站布局对于大跨度分布的卫星,定轨几何因子对于位于中间的卫星较优,对于东、西两边的卫星较差,恰恰不利于东、西双星主业务模式.
2)难以适应多颗卫星的需求.随着后续卫星的发射,在轨卫星数量的增多,一方面,已有的地面测距系统的资源无法满足;另一方面,如果按照一颗卫星对应一套完整测距系统(5个测站设备)来配置,将需要极其庞大的设备规模.
3)难以适应未来卫星自主测控、智能管理的发展新要求[8].卫星自主测控、星载计算机快速处理和自动判识、星间互联与协调观测以及智能化管理等已经规划在未来的卫星发展之中.目前的测定轨由地面实施,需要控制地面5个测站运转,获得测距数据后进行定轨处理,再将轨道根数通过遥控链路传输给卫星,星地交互的环节较多,很难适应发展的技术要求.
2.2 发展方向
发展静止轨道GNSS测定轨是最有效的技术途径.
早在2010年风云四号卫星研制方案论证期间,就对静止气象卫星采用GNSS测定轨进行了研究.那时,BDS尚处于建设之中,不能独立支撑静止轨道的GNSS测定轨.根据当时掌握的GPS有关技术参数所做的模型,仿真结果是:在2015年前后,GNSS难以满足风云四号静止气象卫星的全时段测定轨的技术要求.以此同时,导航卫星运行轨道高度为20000 km左右,且发射天线是朝向地球的.静止卫星的轨道高度约36000 km,只能接收运行到地球对面有限区域的导航卫星信号,这给静止轨道气象卫星的GNSS高精度测定轨带来一系列的技术问题[9],高灵敏度的GNSS接收机的研制还处于起步阶段.
随着我国北斗全球导航系统的建成和使用,加上成熟的GPS系统,已经具备了丰富的空间导航资源.国际、国内静止卫星装载GNSS接收机进行测定轨的工程应用已有一些案例[10].少量已发表的文章描述了静止轨道GNSS测定轨的相关技术,具有一定的借鉴意义,但很多重要的细节不得而知.尤其是测定轨精度能否满足云图定位的要求及能否全天时测定轨满足高时效性要求等方面还是较为欠缺.
随着两颗风云四号卫星的发射,地面测定轨系统运行压力也凸显出来.为提高静止气象卫星的科技水平和应用效益,准备在第三颗卫星上装载GNSS进行试验和验证.之所以不是直接取代地面测定轨系统,是因为新一代静止气象卫星属于业务卫星,须臾不可或缺,也就是必须考虑规避工程风险.
3 静止气象卫星GNSS测定轨仿真分析
3.1 静止轨道GNSS测定轨几何模型
中国北斗卫星由两种轨道的卫星组成,其中,中轨道(medium earth orbit,MEO)卫星运行在21300~21500 km的高度.美国GPS(global positioning system)也属于MEO,运行在20200 km高度的轨道上.美国国家航空航天局将2000年定义的3000~36000 km的空间服务区域分为两部分:1)MEO空间服务区域,高度为3000~8000 km[11];2)地球静止轨道(geostationary orbit,GEO)/高椭圆轨道(highly elliptical orbit,HEO)空间服务区域,高度为8000~36000 km.
GEO卫星GNSS接收机接收的信号来自于地球对面的GNSS导航卫星信号[12],具有以下特点:1)同时可以接收到信号的卫星数量少;2)接收到的信号弱.如图7所示,GEO卫星装载的GNSS接收机的接收天线方向图主波束宽度为±40°,相当于覆盖一个张角为80°的椎体.而地球遮挡约为±9°,构成的张角为18°的椎体遮挡区域(见图6).因此,不被地球遮挡的椎体内分布的GNSS卫星是可用的[13].按照定位原理,同时有4颗导航卫星出现时才可以确定GEO卫星的空间位置.来自地球对面的卫星信号,而且大多数时间是强度低的旁瓣信号(见图6).因此,要求GEO卫星的接收机具有很高的灵敏度.

图6 静止轨道卫星接收GNSS信号示意图Fig.6 Schematic diagram of GNSS signal received by geostationary orbit satellite
3.2 静止轨道卫星接收GNSS信号链路及定位精度仿真
3.2.1 仿真模型的相关参数
中国BDS和美国GPS、俄罗斯GLONASS(global navigation satellite system)、欧盟GALILEO(Galileo satellite navigation system)是联合国卫星导航委员会已认定的提供商.如果不考虑接收机资源开销等问题,在静止卫星上利用以上全部导航卫星无疑能使系统更加优越.经过参数收集和甄别,本文以接收BDS和GPS为主进行仿真,首次给出这些结果,分析对测定轨的满足度.
仿真模型包含以下特性:
1)实际卫星轨道.
2)GPS卫星发射信号的功率及天线方向图采用洛马公司公布的GPS卫星实测数据[14],如图7所示.
3)BDS发射功率及方向图采用有关测试数据.
4)接收天线对地安装,方向图采用仿真方向图.
5)GPS卫星为在轨的31颗MEO卫星,BDS卫星为24颗MEO卫星.
6)GNSS卫星发射波束比较宽,约±60°,波束中心指向地心.
7)GEO卫星装载的接收天线方向图主波束宽度为±40°.

图7 GPS发射天线方向图Fig.7 GPS transmitting antenna patten
导航卫星发射天线指向星下点,卫星绕地球运动,只有当GNSS卫星发射天线指向GEO卫星接收天线(如图8所示),且满足一定的信号强度时,才能解调出导航信息(星历、时间、距离等).

图8 导航信号发射与接收的关系Fig.8 Relationship between transmission and reception of navigation signals
仿真要求:
1)α<60°:GNSS信号波束范围,主瓣+旁瓣约60°.
2) 10.7°<γ<40°:在GEO轨道高度上,40°波束角可以覆盖整个GNSS星座;小于8.7°信号被地球遮挡;在8.7°~10.7°之间信号两次穿越电离层(高度按1500 km),误差较大.
3)根据接收和发射天线增益、发射功率等计算(详见3.2.2)接收信号功率,灵敏度设定为-152 dBm.
3.2.2 接收GPS/BDS信号的灵敏度计算
实现基于GNSS的GEO卫星空间导航,需要解决的首要问题是对旁瓣信号的高灵敏度捕获跟踪并解调导航电文等信息.接收信号功率为
PR=EIRP+Lfree+GR+Lp
(6)
式中,PR为接收信号功率,EIRP为GPS主瓣等效全向发射功率:60 dBmW[15],Lp为极化损失:1 dB,GR为接收天线增益:3 dBi.
Lfree自由空间损耗
(7)
式中,λL1=0.19 m,dGEO=62600 km.
GPS旁瓣增益比主瓣低20 dB,将参数代入式(1),计算得到PR=-151 dBm.
在实测的产品中,西安空间无线电技术研究所研制的接收机灵敏度为-157 dBm.在仿真中,留出3 dB余量.
3.2.3 全时段可同时接收的卫星数量仿真
以定点于东经105°用户星为例,模拟GNSS卫星和用户星的飞行轨迹,仿真全时段(连续72 h)可同时接收的卫星颗数量.为了保证仿真结果在工程中的可靠应用,在接收BDS卫星信号时设置接收电平不低于-154 dBm,在接收GPS卫星信号时设置接收电平不低于-150 dBm.
接收BDS卫星的仿真结果如图9所示,在任意时刻,都可以接收4颗卫星的信号,绝大多数时间可以接收到5颗以上的卫星信号.
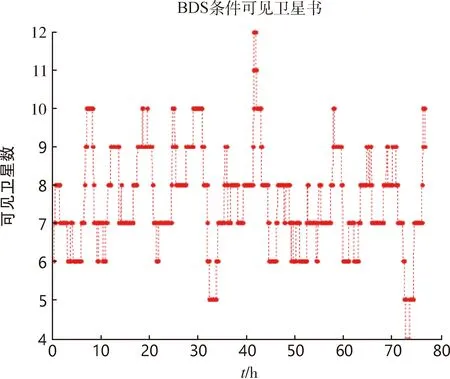
图9 东经105°的静止卫星可同时收到的BDS卫星数量Fig.9 Number of BDS satellites simultaneously received by geostationary satellite at 105°E
接收GPS的卫星仿真结果如图10所示,在任意时刻,都可以接收5颗卫星的信号,绝大多数时间可以接收到6颗以上的卫星信号.

图10 东经105°的静止卫星可同时收到的GPS卫星数量Fig.10 Number of GPS satellites simultaneously received by geostationary satellite at 105°E
从仿真结果看,在达到GNSS接收机灵敏度(-157 dBm)且有3 dB余量的条件下,在静止轨道上任意时刻可以接收的导航卫星数量都在4颗以上,满足全时段空间测定轨的要求.
3.2.4 定位及授时精度分析
GNSS的定位及授时精度取决于系统几何分布、测量误差、系统误差、传输过程误差等因素[16].
根据GNSS伪距测量定位原理,用户星与导航星之间以距离为观测量,通过时间测距进行导航定位.设第n颗导航星于时刻tsn发播导航信号,在时刻tr被用户星接收,则用户星与第n颗导航星之间的距离ln如式(8)所示
ln=c(tr-tsn)=
[(Xn-X)2+(Yn-Y)2+(Zn-Z)2]1/2+ct
(8)
式中,(Xn,Yn,Zn)是导航星n在tsn时刻在地心坐标系的坐标;(X,Y,Z)是用户星接收机在地心坐标系的坐标;C为光速.导航星n的坐标在接收的导航电文中获得,即导航星n的坐标(Xn,Yn,Zn)是直接提取参数.用户星接收机时钟与导航星时钟以及各导航星时钟之间均存在误差,会引入时间误差t=tr-tn,其中,tr为用户接收机时钟与准确时间之间的偏差,用户星自身是难以测准的,故作为未知量;tn为导航星n时钟与准确时刻之间的偏差,由导航专用地面测控系统监测和确定,放在卫星播发的导航电文中,用户星解调获得的tn为已知量.
可以看出,含有用户星接收机坐标(X,Y,Z)和时间误差t的式(8)中共4个未知量.因此,用户星接收机需要至少同时对4颗导航卫星信号进行接收,组成4个方程联立求解,可测定用户星接收机的坐标(X,Y,Z).一般通过最小二乘法解算,包含位置(X,Y,Z)和时间误差t2个分量,且这2个分量是等权重的,定位误差和授时误差是等价的.1 m的位置误差折合为3.3 ns的授时误差.
(1)定位系统几何分布
在地面测定轨系统中,多个测距站对一颗卫星测距,测站几何分布对定轨精度的影响用几何精度因子(geometric dilution of precision,GDOP)来体现,即测量误差造成的测站至卫星距离矢量的放大因子,衡量多站测距定轨精度.地面测距站分布与卫星所形成的空间体积与GDOP成反比,地面测站在星下点周围分布越开阔,越均匀,GDOP越小,对定轨误差的影响就越小.
在卫星导航领域,精度因子(dilution of precision,DOP)是衡量在进行GNSS测量时所具备的几何条件的定量指标.DOP值的大小取决各导航卫星在视场中的分布情况,反映了用户星与GNSS卫星之间组成的几何形状对测距误差的放大作用:在相同测距精度的条件下,DOP值越低,对测距误差的放大作用越小,GNSS服务提供的导航精度越高.当在静止轨道的卫星通过接收GNSS信号来测定轨时,每颗导航卫星相当于测站,而这些测站是动态的,如果由GEO卫星和GNSS卫星间构成的观测几何较差,GDOP值会明显恶化.
仿真了3种情况的GDOP值:1)接收BDS;2)接收GPS;3)同时接收BDS和GPS.结果如图11所示.
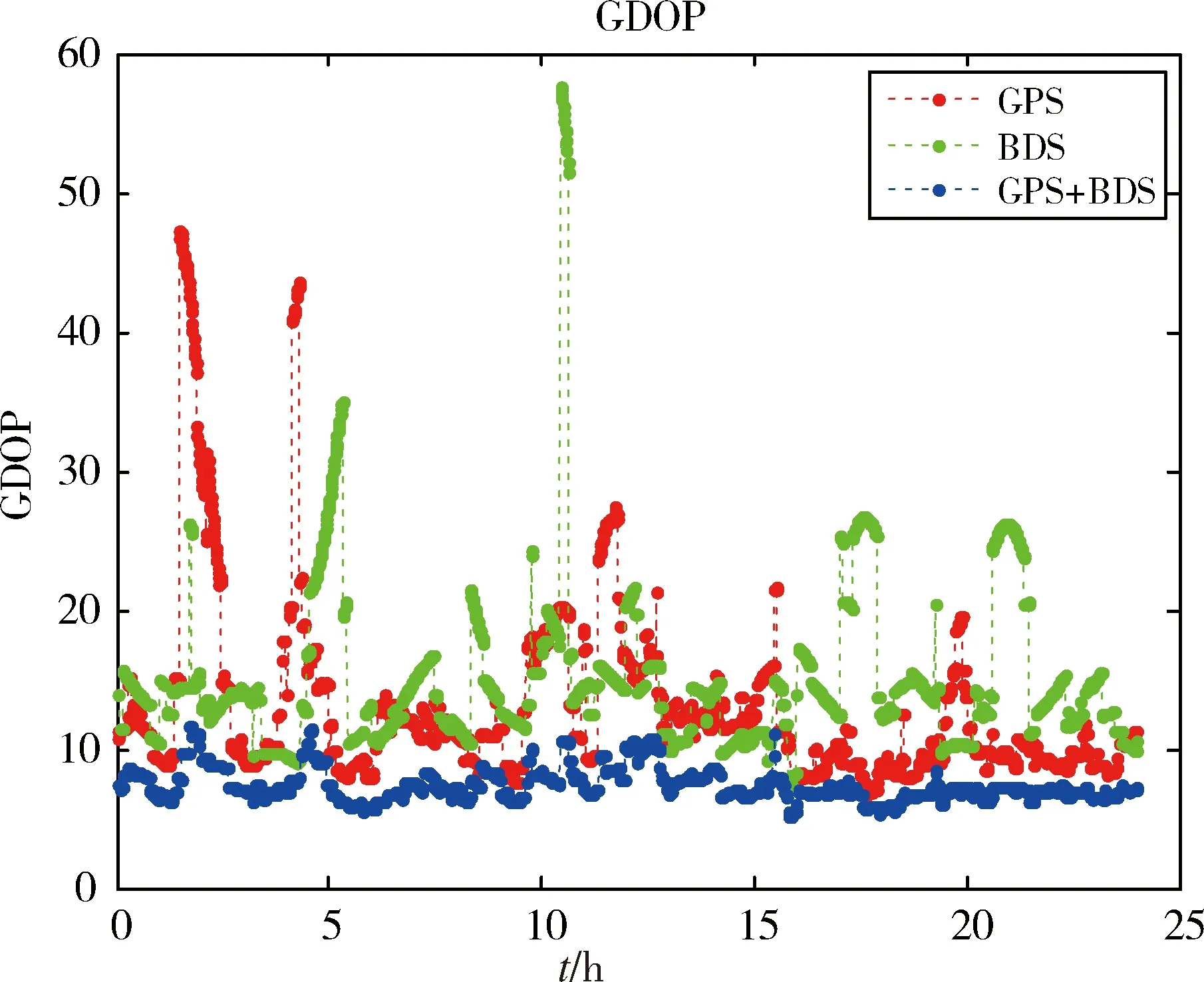
图11 3种信号接收情况下的GDOP值Fig.11 GDOP valueunder three signal receiving conditions
仿真结果如表2.由于GPS可用卫星数较多,单独使用时GDOP值优于BDS,联合使用时系统更优,GDOP平均值约减小1倍.

表2 3种信号接收情况下GDOP仿真结果Tab.2 GDOP value simulation results under three signal receiving conditions
(2)伪距测量误差
测距精度主要受热噪声、动态和系统时钟影响,在弱信号条件下,热噪声引起的码环跟踪误差起决定作用.仿真中,随着C/N0变化,根据式(9)[17]可计算接收机的伪距测量误差.
(9)
式中,σtDLL为接收机测量伪距热噪声,Bn表示环路带宽,D表示积分间隔,Rc为导航信号码速率,Bfe为前端带宽,T为积分时间.实际设计中相干积分时间10 ms,码相位间隔0.1码片,前端带宽25 MHz,环路带宽0.1 Hz.经计算得到伪距测量误差的平均值为 0.94 m.
(3)电离层及对流层误差
GEO卫星,接收GNSS信号时,直接剔除两次穿越大气层(GNSS卫星和GEO卫星之间的连线与地球表面距离小于1500km的空间)的导航卫星接收数据,消除电离层及对流层引起的误差.
(4)星历误差和星钟误差
用户等效测距误差(user equivalent range error,UERE)可分为空间信号测距误差(signal-in-space range error,SISRE)与用户设备误差(user equipmenterror,URE)两部分.在不考虑大气误差的情况下,卫星星历误差、卫星钟误差为SISRE的主要成分直接影响定位性能,表3给出了SISE实测值.

表3 BDS广播星历精度统计Tab.3 Precision statistics of BDS broadcast ephemeris
美国航空航天局通过GPS天线特性试验,在GEO轨道实际测量了GPS的旁瓣特性[18],GPS旁瓣信号的伪距特性和估计值相位有一定恶化,特别是穿越大气层部分.BDS的旁瓣信号伪距特性没有具体的地面测试或试验结果,认为BDS旁瓣信号伪距性能恶化和GPS保持一致,设为0.5 m.
定位结果主要由伪距测量热噪声误差、广播电文误差和几何定位因子决定[18].基于旁瓣信号的GNSS定位系统的SISRE包含星历误差、星钟误差,同时应增加旁瓣误差约0.5 m[19].
空间位置的均方根误差d为
计算表明,定位误差满足静止气象卫星图像定位及卫星管理对轨道精度的要求.
3.3 试验与验证方法
新一代静止气象卫星发展星载GNSS测定轨的一个有利条件,是可以利用已经建成并经过精度检验的地面测定轨系统来进行验证.地面测定轨系统既可以与GNSS测定轨并行工作,又可以相互验证,以降低工程风险,平稳过渡到以GNSS测定轨为主的技术体制[20].
(1)同步进行地面测距和GNSS信号接收
静止气象卫星装载测距信号转发器,与5个测距站组成地基测定轨系统;装载的GNSS接收机,通过接收BDS和GPS导航信号构成天基GNSS测定轨系统.为了进行性能比对和验证,采用同时间段的测量和观测数据.
(2)定轨及预报精度验证
利用卫星的数据传输通道将GNSS接收机解调的电文信息传输至地面,采用与地基测定轨相同的动力学方法进行定轨处理.在此过程中,以时间为基准,可以直接对2个系统确定的卫星空间位置
(X,Y,Z)进行比对验证.也可以根据确定的轨道参数,做30 min、60 min,或12 h、24 h的轨道预报,对预报值进行比对验证.
4 结 论
新一代风云静止气象卫星的地面测定轨系统,其性能经过了检验,满足当前少数卫星的轨道管理、姿态控制和图像定位处理的精度要求.随着后续卫星在轨卫星数量的增多和卫星平台自主管理能力的提高,地面测定轨系统的问题和局限性日益明显.随着北斗导航系统投入全球服务,静止轨道气象卫星采用GNSS测定轨是发展趋势.本文侧重利用BDS和GPS在可靠收集相关参数的情况下,对关键和重要项进行了充分的仿真.结果表明,在同时利用BDS和GPS的情况下,性能指标满足需求.可以通过地面与GNSS测定轨并行运行和相互检验,逐步过渡到以GNSS为主的方式,对于静止气象卫星的长期发展具有重要意义.
猜你喜欢
地理空间信息(2022年11期)2022-11-26
科学(2020年3期)2020-01-06
测绘学报(2018年10期)2018-10-26
城市勘测(2018年1期)2018-03-15
电子制作(2017年7期)2017-06-05
太空探索(2016年12期)2016-07-18
太空探索(2016年12期)2016-07-18
太空探索(2015年2期)2015-07-12
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
