铁道车辆主动悬挂系统模糊控制策略研究
2023-04-26 19:29李丹丹
科技资讯 2023年5期


摘要:车辆悬架的作用是承载车身和车轮之间的力,为车轮和车身之间的力和力矩传递提供渠道,避免来自路面的力直接冲击车身,有效缓解冲击荷载导致的振动,确保车辆安全、舒适行进,保证行车的平稳和安全。车辆平顺性和操纵稳定性是目前车辆动力学中还没有完全解决的问题,在铁道车辆中,悬架电控技术可以针对该问题进行解决,目前这方面的研究备受关注,一些学者开始探究悬架模糊控制器设计和振动悬架系统仿真设计方案。该文以铁道车辆为例,探究基于整车系统模型的新型模糊控制方法,设计模糊控制器,完善控制系统设计,采取有效的控制算法,确保车辆主动悬挂仿真模型构建,为整车模型模糊控制实现提供思路与参考。
关键词:铁道车辆 主动悬挂系统 模糊控制 策略
中图分类号:U270.33 文献标识码:A
Abstract: The role of the vehicle suspension is to carry the force between the body and the wheels, provide a channel for the transmission of force and torque between the wheels and the body, avoid the force from the road directly impacting the body, effectively relieve the vibration caused by the impact load, ensure that the vehicle travels safely and comfortably and ensure smooth and safe driving. Vehicle ride comfort and handling stability are problems that have not been fully solved in vehicle dynamics at present. In railway vehicles, suspension electronic control technology can solve this problem, this research has attracted much attention at present, and some scholars have begun to explore the suspension fuzzy controller design and vibration suspension system simulation design scheme. Taking the railway vehicle as an example, this paper explores a new fuzzy control method based on the vehicle system model, designs a fuzzy controller, improves the control system design, adopts an effective control algorithm, and ensures the construction of the vehicle active suspension simulation model, so as to provide ideas and references for the realization of the fuzzy control of the vehicle model.
Key Words: Railway vehicle; Active suspension system; Fuzzy control; Strategy
懸架性能优越与否直接影响列车的操纵稳定性以及驾驶平稳性,传统被动悬架性能上存在一定不足,要确保列车行驶中的稳定性和安全性,需要应用到主动悬架,该文就列车主动悬架模糊控制进行研究,尝试通过动态仿真来对被动悬架以及主动悬架对比分析。
1列车悬架动力学模型构建
列车模型结构并不复杂,设计也应该尽可能简单化,不过其包含的列车平顺分析特征,所以在进行悬架控制上有较为广泛的应用。此次研究中通过2自由度四分之一车辆模型,构建该模型的动力学微分方程如下。
在该模型构建中,可以借助线性弹簧替换轮胎刚度,可以对轮胎阻尼忽略笔记,这里的k1表示的hi轮胎径向刚度系数,k表示的是悬架刚度系数,c表示的是悬架阻尼系数,m表示非簧上质量,M表示的是簧上质量。q、z1、z2代表的是路面激励、非簧上质量位移和簧上质量位移。模型中的相关参数主要来自搭建试验平台的相关结构参数,具体结构如表1所示。
2模糊控制理论及模糊控制器设计
2.1模糊控制理论概述
在模糊控制中,即使控制对象本身没有准确的数据来构建三维模型,也可以结合数据模型构建问题,通过语言变量来实现模型构建,模糊控制中,综合了众多的经验和知识系统,因此这种控制行为和人的真实行为是具有统一性的[1]。其优点主要是可以根据激励以及复杂数学模型的车辆悬架系统应用中实现有效应用[2]。将模糊控制方法应用到主动空气悬架控制中,有一定的可行性。
2.2模糊控制器设计
首先,设计模糊控制器,具体设计要点如下。
(1)准确把握模糊控制器的输入及输出变量参数。
(2)精准输入输出变量的模糊语言值、量化因子、比例因子以及模糊变量隶属度函数。
(3)编写制定模糊控制规则,相应模糊控制规则可以结合理论研究和经验基础来制定,值得一提的是,还需要针对部分优劣状况对控制效果影响开展深入分析[3]。
(4)明确模糊求解的办法。模糊控制器将输出数据形成一个集合,这时候的被控对象只能选择精准控制量来控制。因此,需要提确保模糊输出结果准确,将输出的模糊集合快速转化为能够精确控制的数据即可[4]。
此外,确定模糊控制器的输入输出变量。在控制器水中,模糊控制器构建要遵循特定规则和标准要求,以特定的条件为基础,目的是让气囊压力调节成为可能,还要确保弹簧刚度满足现实需要[5]。结合相关控制对象,可以选择使用二维模糊控制器,并在模糊控制器输入的误差量中随机取7个语言值,误差变化率以及模糊控制器输出都取5个语言值。这样就可以形成模糊控制器的输入误差集合、误差变化率集合以及模糊集合。
2.3主动悬架模糊控制规则
构建模糊控制规则需要将手动控制作为参考,针对被控对象开展整体观测,结合现有的经验和知识储备,进行综合分析,制定有效控制措施,实现对被控对象的精准控制,让系统设计和应用达到理想效果。模糊控制指标构建的基础也是簧上质量加速为负值状态下,在加速度为负值状态下,此时如加速度变化量是负值,簧上质量加速度不断增大,要想对于现有的负大误差进行全面处理,强化误差变化控制作用等,就需要切实优化控制量选择。在簧上质量加速度是负值情况下且其变化量为正时,确保系统误差有效控制目标实现,因此,要尽可能将簧上质量加速度消除,且保证加速度在合理范围内,需要选择较小的输出控制量。在簧上质量加速度为负小的情况下,系统状态处于相对稳定的态势,如此时的变化量倘若是负值,选取控制量变化为正小,这对于控制指标项的发展具有一定影响;而控制指标的变化量是正值情况下,系统就能完成对于负小误差的有效处理,此时选择的控制变化量即为0[6]。
簧上质量加速度的正负值对于控制效果的影响有一定统一性,在数值变化的请款修改,需要对于符号做出相关调整。总结起来,就是在控制量变化选择中,在簧上质量加速度指标素质较大的状况下,可以选择控制力对于负大误差进行消除,在加速度指标一定的基础上,进行控制力选择时需要防止超调情况发生,这对于提升系统稳定性至关重要。
2.4自适应控制系统设计
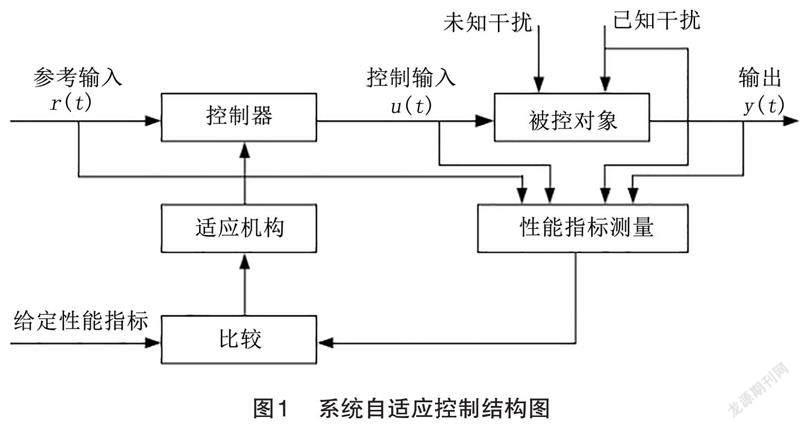
此次列车主动悬挂系统设计中,选择底盘车轮独立纵臂悬挂方式,寻求着力点。在开展系统线路设计时,可以通过相关算法应用,提升车辆驾驶路线准确性,有效控制前进方向,把握有效距离。在开展系统设计的过程中,可以借助激光雷达开展定位处理,为系统提供必要的导航服务。通过将系统和计算机系统连接,实现对系统运行速度的精准控制目标,还能减少系统在设备中产生的负载问题,让系统能够高效工作,降低系统工作量[7]。系统电机全部加入速度环、电流环,这对于优化系统速度误差,实现高效的功率控制具有积极作用,在点位电机中,通过位置环设定,确定系统运动方向。在系统底盘以及车轮轨道面之间,要确保有一定的间距,这是为了达到对车轮转速速率的控制,能够有效避免系统在行进中不按照规定线路和方向前进。图1为此次设计的系统自适应控制结构图。
在实际的系统控制中,有很多控制设备以及通信模块,能够实现对系统的高效检测目标,对相关控制效果做好控制,达到集中控制的效果。在进行具体的系统设计中,一般将PLC作为主控单元,将相关数据传输网络作为基础和前提,确保整体控制效果实现。在控制系统启动前,可以在集控台中进行信息发布,在现场条件达到启动需求的情况下,系统能够实现自主启动[8]。在实际的系统控制中,主要是以自动控制为目标,相应设备的连接安装也需要符合流程,进行中央控制台的启停操作,保证控制台实现对设备的精准有效控制目标,可以有效防止闭锁问题产生。要确保系统的集中监控目标实现,在设备实际运行中,需要做好对异常状态和信号的报警处理工作,以便及时提醒相关工作人员,做好对异常信号的及时正确处理。在列车主动悬挂系统控制系统设计中,借助I/O控制系统使用,将主控计算机应用到故障诊断系统中,实现对于相关设备实施运行参数的采集,再借助以太网接口和主控计算机对数据通信进行控制,为现场设备操作提供必要支持[9]。
前端设备数据采集也会在很大程度上影响系统功能,设计的系统中,具备数据采集功能的设备有四个,这些数据采集设备和系统一体化设备连接,可以完成二级分布式控制目標。此时一旦出现异常信号。系统会将故障信号和设备故障名称传输到计算机显示屏中,进行故障诊断,判断故障范围,为故障维修提供必要的信息支持和指导[10]。
2.5系统建模思路
首先,针对铁道车辆出现的随机不平顺的信号进行整合分析,重点对影响立车垂直振动的轨道水平不平顺以及方向不平顺两种振动方式。
以功率谱密度采样数值方法来开展低干扰高速轨道谱模拟,通过MATLAB/M文件在仿真环境中实现,发现模拟的度过低干扰高速轨道谱水平不平顺以及方向不平顺的谱密度曲线和对应解析式曲线一致性比较高,精度也比较理想,这些为铁道列车纵向主动悬挂控制系统仿真实验提供了有效的轨道不平顺的动态激励信号[11]。
其次,进行铁道列车运行中车辆产生的多自由度随机纵向振动机理的探究,为显影自由度列车整车纵向振动模型构建提供相关理论依据。
最后,通过铁道立车自由度车辆动力学微分运动方程使用,基于MATLAB以及Simulink环境下构建列车车体、专项架构以及轮对模型,针对封装组合成为相应自由度的铁道列车纵向主动悬挂系统的应用仿真模型,为相应控制策略设计和应用提供有效的车辆模型支持。
3仿真分析
该文选择使用联合仿真控制系统。考虑到汽车的行驶地面不平度具有随机性,汽车行驶速度快慢也有不同原因,行驶过程比较复杂,是动态系统。其中包含非线性特征,也包含未知变化特征。因此,对于主悬架的控制实际上是比较复杂的。要构建一个精准的地面汽车模型并不容易,悬架系统是非线性机、电、液一体化的动力系统。在电子技术、计算机技术、机械动机学科不断发展的进程中,结合现代控制理论,通过合理的选择控制变阻尼减震器,能够将振动控制在最低水平,促进汽车档次升级。此外,需要注意的是,悬架系统是强非线性,多自由度系统,其精确建模难度也非常大,所以更适用于模糊控制。这种控制模式就是专门针对非线性系统使用的。其主要特点是允许控制对象没有精确数字模型,可以通过语言变量替代数字变量,在控制中包含大量控制经验和知识,和人的智能行为比较接近。基于ADAMS软件自身提供的控制工具箱功能单一,对有复杂控制装置的机械系统,控制子系统设计需要借助外部控制系统设计软件来实现。此外,一些控制软件控制中要构建一个整车模型对于食用者而言是比较艰巨的任务,且难以保证精确度。在科学技术不断发展进步的过程中,可以尝试使用不通过软件分别在各自使用中的优势发挥,构建一种集成环境——联合仿真方法。现阶段,能够应用于控制系统计算辅助设计的软件较多,包含MATLAB/MATRIX等,在众多仿真语言以及仿真软件包中,MATLAB通过模块化计算方法应用,实现可视化与智能化的人机交互,具备丰富的矩阵运算功能,能够进行数据处理函数以及图形绘制,是目前控制系统设计和仿真领域比较受欢迎的一种软件[12]。
在进行仿真训练中,假设轨道条件为B级,车速为60 km/h,研究模糊控制策略下的控制效果,对于车辆控制前后的车身垂直及速度响应、车身俯仰角加速度响应、车身侧倾角就读响应等参数进行记录。在仿真实验中,需要对多种不同的模糊控制模式下的车辆稳定性指标进行记录。从仿真结果来看,通过模糊控制措施的有效实施,整车车身垂直加速度响应、车身俯仰角加速度响应以及车身侧倾角加速度响应的衰减效果都比较理想,且实验中的车轮胎动变形的情况也得到了明显缓解,悬架动行程效果不是十分突出,但是也有一定作用。
通过构建相应的列车整车悬架模型,构建对垂直运动的模糊控制器以及其他的模糊控制器,车体采用不同方式的控制规则,结合相应力学合成,对于促进列车主动悬挂系统优化,提升系统稳定性和舒适性有很好的效果。构建的不同运动的模糊控制器,要比单一的使用同一类型的模糊控制器控制效果明显更好,以此构建的主动悬挂控制系统的舒适性以及操纵稳定性也更优良。
4结语
该文探究铁道列车主动悬挂系统的模糊控制策略,研究一种模糊控制器设计,通过构建整车模型,通过一种控制策略应用,在仿真模拟中发现,这种控制模式下的铁道列车车身垂直加速度有显著改善作用,相应悬架动行程变化不明显,但是车辆车轮变动改善效果突出。研究发现,垂直振动模糊控制器、俯仰振动模糊控制器、倾角振动模糊控制器以及逻辑控制器的综合使用,可以有效促进控制效果的改善。综合使用相关模糊控制器,可以促进在相同的仿真背景下,铁道车辆的平顺性、舒适度以及操作稳定性都有明显改善。
参考文献
[1] GOLOUJE Y N,ABTAHI S M.Chaotic.Dynamics of the Vertical Model in Vehicles and Chaos Control of Active Suspension System via the Fuzzy fast Terminal Sliding mode Control[J].Journal of Mechanical Science and Technology,2021,35(1):31-43.
[2]ZHANG R Y,SHI P C,ZHAO L F,et al.Research on Coordinated Control of Electronic Stability Program and Active Suspension System based on Function Allocation and Multi-Objective Fuzzy Decision[J].Proceedings of the Institution of Mechanical Engineers,Part I.Journal of Systems and Control Engineering,2018,232(9):1155-1169.
[3]马新娜.基于磁流变阻尼器的高速机车横向振动控制与动力学研究[D].北京:北京交通大学,2012.
[4]雒琦,孙步功,黄晓鹏,等.高速车辆半主动悬挂系统模糊控制策略研究[J]. 林业机械与木工设备,2022,50(5):57-67.
[5]朱浩,刘少军,邬平波,等.基于柔性车体的铁道车辆主动悬挂的模糊控制研究[J].中国机械工程,2006,17(18):1883-1887.
[6]雒琦.基于磁流变阻尼器的半主动悬挂系统模糊控制策略[J].机械研究与应用,2017,30(1):46-48,55.
[7]向银强,王磊,薛萍.铁道车辆主动悬挂系统模糊控制策略研究[J].机械工程师,2022(1):57-59,62.
[8]李忠继,戴焕云,曾京.基于磁流变阻尼器的铁道车辆模糊半主动控制[J].交通运输工程学报,2014(5):43-50.
[9]雒琦.铁道车辆半主动悬挂系统振动控制研究[D].兰州:兰州交通大学,2017.
[10]成新明,唐启志.高速列车横向振动自适应神经模糊控制的仿真[J].铁道机车车辆,2012,32(5):10-14.
[11]曲双,王雷,王浙东,等.基于MATLAB软件的动车组转向架悬挂系统半主动控制仿真分析[J].城市轨道交通研究,2021,24(2):88-93,96.
[12]唐启志.基于磁流變阻尼器的高速列车横向半主动减振控制方法的研究[D]. 长沙:中南大学,2012.
作者简介:李丹丹(1988—),女,硕士,工程师,研究方向为机械—铁道车辆。
猜你喜欢
教学考试(高考化学)(2021年2期)2021-05-30
中学生数理化·高一版(2020年3期)2020-04-21
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
小学生作文(低年级适用)(2019年9期)2019-10-08
数学大世界(2018年1期)2018-04-12
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05