小型固定翼无人机精确无损回收技术初探
2023-04-26 03:18杨会林刘永安刘亚恒
教练机 2023年1期
欧 军,杨会林,刘永安,刘亚恒
(航空工业洪都,江西 南昌,330024)
0 引言
随着航空技术的发展,不同用途、功能和样式的无人机大量涌现。同时,为了有效提高无人机使用效能,无人机回收技术得到广泛应用。回顾无人机的发展与运用,其回收过程是一个非常重要且容易出现故障的阶段。有资料表明,无人机回收过程的故障数占整个执行任务故障数的80%以上[1],回收技术已成为影响无人机技术发展的关键之一。据统计,对于固定翼无人机最常用的回收方式主要有伞降回收和起落架着陆滑跑回收方式。伞降回收易受环境及气象条件的影响,落点偏差较大,不能实现精确定点回收,而且由于不可控,回收后极易造成无人机损伤。起落架着陆滑跑回收则需要一定长度的平整地面或跑道。 因此,这两种回收方式均对回收环境提出了较高的要求,一般只能选在较空旷的陆地上实现[2]。随着无人机在各军兵种的广泛应用,尤其是在舰艇或复杂地貌等狭小空间环境使用的情况越来越多,新型精确无损回收已成为小型无人机技术发展的必然选择。
1 主要无损回收技术及运用情况
随着小型无人机的大量出现和运用,针对小型无人机无损回收技术研究已成为热门。典型的无损回收方式主要有“天钩”回收、撞网回收等。为适应在舰上狭小空间无人机回收需求,DARPA 在 “战术侦察节点”(TERN)项目中,最新提出了一种叫“侧边吊臂”的无人机精确无损回收方式。
1.1 “天钩”回收
美国“扫描鹰”(ScanEagle)无人机、RQ-21(Blackjack)无人机等均采用“天钩”(SkyHook)回收系统以实现无损回收(见图1)

图1 “天钩”(SkyHook)回收系统
该“天钩”回收系统是由英国因斯图(INSITU)公司研制。其结构紧凑、安装灵活、维护方便、可实现双向拦阻,并且在整个回收过程中,无人机的运动被限制在一定空间内,特别适合小型固定翼无人机在狭窄回收场地或舰船上使用,且基本不占用舰船甲板空间。
“扫描鹰”无人机在回收过程中,首先是机翼前缘撞到拦阻绳,随着无人机继续向前飞行,拦阻绳沿机翼前缘滑入翼尖处的拦阻钩,之后无人机在阻尼器的吸能缓冲作用下迅速减速,当速度减小至失速速度时,无人机机体做下翻动作,最终通过拦阻钩悬挂在拦阻绳上,回收示意见图2。

图2 “天钩”(SkyHook)回收过程示意图
1.2 撞网回收
国外对无人机撞网回收的研究最早始于20 世纪80 年代[3]。 据不完全统计,美国“天鹰座/苍鹰”(Aquila)、“银狐”(Silver Fox)、“杀人蜂”(Killer Bee) 和 BQM-147A“敢死蜂”(Exdrone),以色列“侦察兵”(Scout),南非“秃鹫”(Vulture)和国际合作的“先锋”(Pioneer)等无人机都成功使用过撞网回收系统进行无损回收(见图 3 和图 4)。

图3 “先锋”(Pioneer)无人机撞网回收

图4 “银狐”无人机撞网回收
目前国外已有应用的无人机典型撞网回收方案主要有:单网三杆、双网双杆和单网单杆等方案,其中应用较多的为单网三杆结构方案。无人机撞网回收系统主要涉及如无人机吸能缓冲技术,无人机末端精确引导技术,系统动力学仿真技术和系统试验验证等相关技术[4]。撞网回收可根据不同的无人机质量自由配置不同的杆-网结构实现无损回收,适应无人机质量范围大[5]。回收系统可灵活布置于陆基固定场地、车载或舰载布置,满足无人机在复杂环境下精确定点无损回收要求。
1.3 侧边吊臂回收
2015 年5 月7 日,DARPA 透露了该局与美国海军研究办公室(ONR)联合开展的“战术利用的侦察节点”(TERN)项目的最新进展。TERN 项目采用一种叫侧边吊臂的回收方式(见图5)进行精确回收[6]。

图5 侧边吊臂回收
侧边吊臂是一套可满足无人机进行水平发射和回收的简便机械装置,其占地面积较小,可安装在卡车、舰船和地面固定设施上,允许无人机的最大重量为400kg 左右[7]。 侧边吊臂系统能够实现快速设置和受控减速,适用于目前和未来的小型无人机系统。 该回收方案在2014 年已完成缩比模型试验,2016 年12月进行了全尺寸侧边吊臂系统回收演示验证试验,重复捕捉了美国洛·马公司的“狂怒”无人机。无人机回收过程见图6。

图6 侧边吊臂回收
2 小型无人机无损回收技术方案
某小型无人机翼展长3m,采用涡轮螺旋桨发动机为动力进行长航时巡飞。无人机要求具备可在驱护舰及复杂陆基环境等空间狭小、保障条件低等条件下实现精确、无损回收。 其回收主要设计指标如下:
1) 最大回收质量:60kg;
2) 最大回收速度:30m/s;
3) 回收飞行高度:9~13m;
4) 回收最大过载:≤15g;
5) 剩余末速:≤0.5m/s
由前所述,“天钩”回收、撞网回收以及侧边吊臂回收等均可在复杂环境下实现对该无人机的回收。若采用撞网回收,考虑无人机采用涡轮螺旋桨发动机、头部主要安装集光电、红外传感器或合成孔径雷达于一体的传感器探测系统。撞网回收过程主要是通过机头、机翼与网带的冲击进行缓冲,极易造成头部传感器系统的损伤。而“天钩”回收或侧边吊臂回收方式,均为航向拦阻实现减速回收,若按最大回收过载不超过15g 估算,无人机最小直线拦停距离约6m。 若采用类似“扫描鹰”无人机的“天钩”回收方式,无人机在拦停后由于拦停距离过长会坠落到地面或舰船甲板上。若采用侧边吊臂回收方式,则需要较长的回收导轨长度,在舰艇或复杂陆基环境等狭小空间不易布置类似的回收系统。因此,为有效解决无人机直线拦停距离过长与狭小空间限制的矛盾,设想通过旋转减速代替直线减速的方式实现无人机的拦阻回收,即采用立式旋转回收方式实现该小型无人机在舰艇或复杂陆基环境等狭小空间上精确、无损回收。
2.1 回收系统总体方案
立式旋转回收系统的组成原理如图7 所示。回收系统主要由涡轮阻尼器(基座)、立柱、上/下悬臂、拦阻绳等组成。立柱、上/下悬臂构成架设拦阻绳的框架,使拦阻绳的最高点工作高度达到15 米,拦阻绳在架设完成时处于紧绷状态;立柱底端与回收系统基座的涡轮阻尼器的转轴固联。

图7 立式旋转回收系统
无人机左右翼尖均设计有类似“扫描鹰”(ScanEagle)无人机一样的拦阻钩。 无人机在回收过程中,首先是机翼前缘撞到拦阻绳(此时发动机未停车)。随着无人机继续向前飞行,拦阻绳沿机翼前缘滑入翼尖处的拦阻钩(此时拦阻钩内的微动开关被触动,使发动机停车)。之后无人机带动悬臂和立柱绕立柱中心轴旋转,从而带动基座中的涡轮阻尼器转子转动,转子的叶片搅拌阻尼器内腔中静止的流体,产生作用于转子叶片表面的阻尼力,从而形成阻止转子和转轴持续转动的阻尼力矩,最终使无人机减速[8]。当速度减小至失速速度时,无人机机体做下翻动作,最终通过拦阻钩悬挂于拦阻绳的绳结上。
2.2 拦阻减速过程计算
根据上述立式旋转回收系统工作原理,假定无人机为刚体,不考虑拦阻绳的质量和弹性变形等。 由于无人机机翼前缘很光滑,可忽略拦阻绳与机翼前缘的摩擦力。在方案论证阶段,主要考虑拦阻力的作用,由圆周运动规律,可建立无人机回收过程动力学模型:
式(1)中:M拦为无人机在旋转回收过程中的拦阻力矩(单位:N·m);
K 为涡轮阻尼器的阻尼力矩系数;
J杆臂为回收系统立柱和上/下悬臂组成的系统绕立柱轴线旋转的转动惯量(单位:kg·m2);
r臂为上/下悬臂长(单位:m);
n 为旋转回收转速(单位:r/min);
α 为旋转回收角加速度(rad/s2);
F拦为拦阻力(单位:N);
V 为无人机速度(单位:m/s)。
计算条件:回收质量为60kg,回收速度为30m/s,上/下悬臂长 r臂=3m,立柱和上/下悬臂转动惯量 J杆臂=70kg·m2,涡轮阻尼器的阻尼力矩系数K=2.5。则初步计算结果表明,无人机总共旋转了约1.41 圈,于17s后被最终拦停,设计方案已基本满足该型无人机回收设计指标的要求。无人机拦阻过程的拦阻过载、旋转离心过载、速度和旋转圈数随时间变化曲线如图8~图9 所示。

图8 回收过载曲线

图9 减速过程及旋转圈数
在本方案中,作为缓冲吸能装置的涡轮阻尼器是关键部件,具体的设计尺寸和流体介质压力一般在仿真基础上通过试验验证后调整获得。另外,需要特别注意的是,在拦阻绳进入拦阻钩后,无人机带动上/下悬臂和立柱开始绕中心轴线旋转时,无人机将会承受较大的离心力,离心过载达到30g,因此需要对无人机机体的结构强度设计和设备的抗过载能力提出较高的要求。
3 主要设计参数对拦阻过程影响
由式(1)和上述计算分析可知,在规定的回收质量和回收速度要求下,立式旋转回收系统总体方案主要设计参数有涡轮阻尼器的阻尼力矩系数K、上/下悬臂长L,以下分别针对这两个主要参数进行定量对比分析。
3.1 涡轮阻尼器力矩系数对拦阻过程的影响
作为立式旋转回收系统中缓冲吸能装置的关键部件指标,涡轮阻尼器的阻尼力矩系数K 对无人机回收拦阻过程影响明显。在前述2.2 节参数选择基础上,K 分别放大1.5 倍或减小至0.5 倍,其拦阻参数随时间变化曲线如图10 和图11 所示。

图10 回收过载对比曲线

图11 减速过程及旋转圈数对比
上述计算分析可知,当阻尼力矩系数K 增大或减小50%时,最大拦阻过载亦相应增大或减小50%。阻尼越大,无人机拦停时需旋转圈数越少,拦阻速度也相应减速更快,亦更快完成无人机回收。另外,阻尼系数K 对最大离心过载基本无影响,但随着不同的减速过程,阻尼系数越大,离心过载曲线下降更快。方案设计时,可综合考虑最大拦阻过载和预计旋转圈数以确定阻尼力矩系数K 的取值范围。
3.2 上/下悬臂长对拦阻过程的影响
为讨论方便,在前述2.2 节参数选择基础上,分别取基准悬臂长L=3m、2L、3L 不同的臂长参数,计算无人机回收过程参数,其参数对比曲线详见图12~图13。

图12 回收过载对比曲线
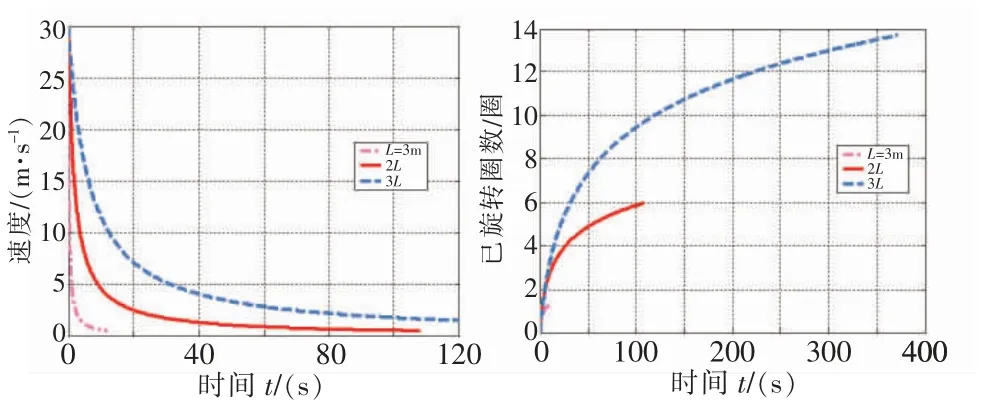
图13 回收过载对比曲线
由上述计算分析可知,臂长参数对拦阻过载、拦停时共旋转圈数有显著的影响,随着臂长参数的增大,最大拦阻过载迅速减小,实现无人机拦停的时间亦大大增加,回收过程中无人机相应减速更慢。另外,当臂长增大1 倍,相应的最大离心过载减少1 倍,但其下降变化更加缓慢。方案设计时,在考虑无人机最大离心过载限制、在回收空间和上/下臂结构设计允许的情况下,可适当增大臂长参数,同时相应提高涡轮阻尼器阻尼力矩系数,以实现控制最大离心过载的同时较快速地完成无人机回收。
4 结语
本文基于目前国内外已应用的无人机无损回收技术为基础,结合某小型无人机方案特点和典型回收技术要求,提出了立式旋转回收技术方案,并初步建立回收技术方案动力学模型,完成了无人机拦阻回收过程的计算分析。针对该回收方案关键设计参数进行了定量的对比分析,给出了相关参数的选择思路。 分析结果表明, 该回收系统设计方案基本满足无人机回收设计指标要求。
目前,本文工作仅完成了立式旋转回收技术方案的初探,所建立的分析计算模型还有待进一步综合考虑回收系统结构、无人机气动力、重力、拦阻绳弹性、涡轮阻尼器特性等因素后进行联合仿真分析,以得出与试验接近的回收过程参数,以指导和开展详细方案设计及具体的试验验证工作。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
工业安全与环保(2020年10期)2020-11-05
石油和化工设备(2020年5期)2020-06-09
中国特种设备安全(2019年3期)2019-04-22
四川建筑(2018年4期)2018-09-14
摄影之友(影像视觉)(2017年11期)2017-11-27
大陆桥视野·下(2017年8期)2017-09-19
山东工业技术(2016年15期)2016-12-01
设备管理与维修(2016年6期)2016-03-16
噪声与振动控制(2015年4期)2015-01-01