
基于高压水射流技术的爬壁除锈机器人研究
2023-05-20 13:05孙帅帅张志颖
中国新技术新产品 2023年4期
孙帅帅 冯 辰 张志颖 宋 佳
(扬州工业职业技术学院智能制造学院,江苏 扬州 225000)
0 引言
由于化工行业污染多、耗能高、风险高,因此安全事故频频发生,不仅在经济方面带来巨大损失,严重影响了伤亡者及其家属、企业甚至整个行业。化工罐在长期闲置后,其罐体内壁和空气中的氧气会产生氧化反应,使化工罐罐体内壁生锈,无法立刻使用,需要操作人员手动对其内壁进行除锈处理后,检测其整体的稳定性和密封性,然后可以投入使用。
采用传统的除锈工艺时需要操作人员进入罐体的内部进行作业,由于化工罐内部放置化学物品,其产生的气体会充满整个罐体内部,操作人员进入罐体内部后,吸入该气体会对操作人员的身体造成伤害,针对传统除锈工艺的成本高、污染严重、损害工人健康和效率低等问题,整合了机器人技术和高压水射流除锈技术,设计了一款高压水射流技术的爬壁除锈机器人。
1 除锈机器人的总体方案设计
除锈机器人上面装有高压水枪,这也是这项设计中的重要技术,这种机器人的作业运动方式如下:首先,安装在高压水枪下方的磁吸式履带爬壁机器人,将高压水枪进行移动;其次,安装在磁吸履带爬壁机器人顶部的旋转机构以及安装在旋转机顶部的摆动机构,用于安装的高压水枪的水平转动作业并且能够使高压水枪在需要上下摆动时进行作业。然后,驱动构件用于带动履带构件在化工罐内壁上移动,它的移动包括上下移动和左右移动;最后是高压喷水构件,高压喷水构件固定连接于驱动构件且高压喷水构件用于喷出高压水体至化工罐内壁上,使化工罐内壁的铁锈脱落。
这次设计的除锈机器人能够通过磁吸附履带爬壁机器人将高压水枪带入化工罐中,省去了人工进入化工罐中。高压水射流清洗技术作为清洗方式之一,具有高效、环保、可持续等特点,已经逐渐成为最广泛的清洗方式[1]。通过加压机和高压水枪可清除化工罐中的锈迹,从而减少污染,还可以通过旋转机构和摆动机构清除不同方向的锈迹,从而降低除锈成本,提高除锈效率。
2 除锈机器人的功能设计
2.1 吸附功能设计
爬壁机器人是移动机器人领域的一个重要分支,它将地面移动机器人技术与吸附技术结合,可在垂直壁面上附着爬行,并能携带工具完成一定的作业任务,扩大了机器人的应用范围[2]。这次所设计的爬壁机器人在钢板厚度≥6 mm 的壁面上,当静止或移动时不脱落,这是所有功能的基础。移动功能设计:保证机器人能够在至少5 m 的储蓄罐表面灵活移动,包括各个方向的直行及转向运动,使车体的每个轮体在运动过程中都能有一定的正压力接触罐体壁面,为机器人的移动提供充足的摩擦力,保证爬壁机器人能够快速准确地到达目标地点。
2.2 除锈功能设计
高压水射流除锈的原理是利用高压泵打出超高压水,并经过管路到达喷嘴,再通过喷嘴将高压力流速低的水转换为低压且流速高的射流,由于射流有很高的冲击动能,连续不断地作用在表面,因此锈迹脱落,最终完成清洗。与传统的人工喷砂除锈、机械方式清洗除锈相比,超高压水射流除锈不会污染环境,不腐蚀设备并且不会造成任何机械损伤,减少对操作工人的危害。
2.3 驱动功能设计
除锈机器人不仅能够为本体移动提供充足的动力,还能在拖带20 m 以上电缆的情况下车轮扭矩充足,即拥有很强的负载能力并且能够轻松跨越焊缝,有很强的越障能力。
2.4 控制功能设计
保证机器人在使用过程中不停机且移动及转向动作指令信号长距离传输准确,检测探头上抬、下落动作到位。
3 除锈机器人的机构设计
3.1 除锈机器人的结构设计
高压水射流爬壁除锈机器人的设计结构如图1 所示,这次设计的除锈机器人包括以下机构:1)行走机构。行走机构又包括机架并且机架的内侧两端均通过转轴对称,设置2个转轮且2 个转轮的外壁之间套设有履带;机架的底侧中间固定有磁吸模块。2)除锈机构。其包括安装于机架上的高压水泵和水箱,其中高压水泵的进水端通过管道与水箱相连接并且高压水泵的出水端设置软管,软管相对高压水泵的一端连接喷射管。

图1 除锈机器人结构示意图
另外,行走机构还包括驱动组件并且驱动组件包括通过支架固定于机架1 底侧的驱动电机,而且驱动电机的输出端与其中一个转轮相连接。
除锈机器人的磁吸模块包括导磁板,而且导磁板的底部对称设置2 个永磁铁;机架的底侧固定1 个控制箱并且控制箱内设有控制器和蓄电池。
通过以上技术方案可知:在具体使用过程中,可以通过电机驱动转轮转动,使转轮带动履带转动,从而可以控制装置行动且磁吸模块上前侧永磁铁的N 级经过导磁板到达后侧永磁铁的S 级,再经过后侧永磁铁的N 级通过壁面到达前侧永磁铁的S 级构成回路,进而保证整个装置能够吸附于导磁壁面上;装置在壁面上爬行的过程中,可以通过高压水泵将水箱内的除锈液抽入软管内,再通过喷射管向外高压喷出,从而可对物体进行清洁并除锈。
其中,如图2 所示的调节组件包括转动安装于机架顶部的转杆并且转杆的顶端固定有转盘,高压水泵和水箱均设于转盘上;转盘顶部的一端由支撑柱固定,支撑柱的顶端通过连接支撑板的转轴转动,而且在支撑板上设有喷射管。滑槽设计在转盘的一端靠近支撑板的下方并且滑槽内转动安装有丝杆,丝杆的外壁设计带有螺套,螺套与支撑板之间铰接有连杆。
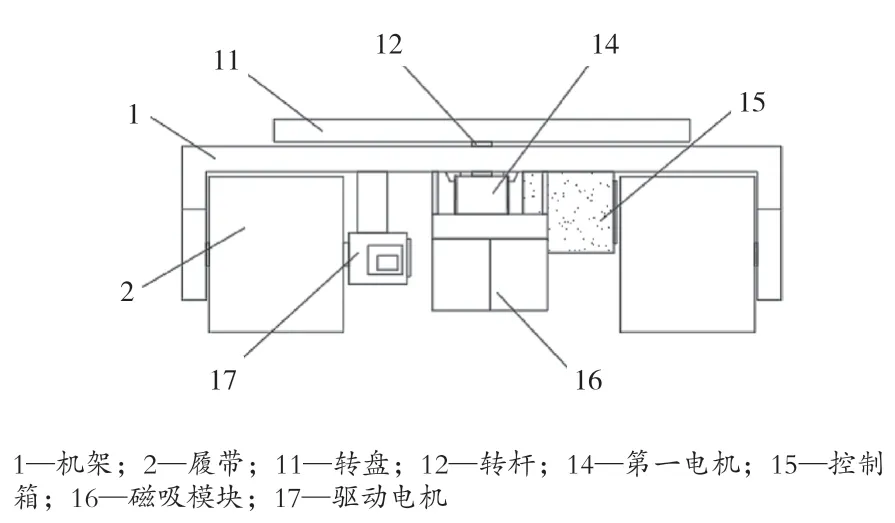
图2 除锈机器人机架处的侧视图
调节组件还包括固定在转盘一侧的第二电机并且第二电机的输出端延伸到滑槽内、并与丝杆相连接。
设计在机架底侧的第一电机,它的输出端贯穿机架、并与转杆固定连接。通过第一电机驱动转杆转动,使转杆带动转盘转动,然后转盘带动除锈机构转动,从而可以对喷射管的喷射方向进行360°调整,代替了行走机构移动而调整方向,使除锈更方便。
通过第二电机驱动丝杆转动,能够使丝杆带动螺套在滑槽内移动,螺套带动连杆运动,使连杆拉动支撑板在支撑柱上转动,从而快速调节喷射管的上下朝向,可以灵活地调整喷射角度,进一步扩大喷射范围,提高装置的实用性。
高压水射流爬壁除锈机器人还包括固定组件,固定组件包括设置在支撑板上的固定环且固定环内设置多个弹簧,弹簧相对固定环的一端固定1 个夹环。
通过上述技术方案以及图3 可知:这次设计将喷射管插入固定环内,弹簧受到挤压发生收缩,停止穿插后,在弹簧的作用下,夹环贴紧在喷射管的外壁,从而将喷射管夹紧在固定环内,防止喷射管活动,而且拨开夹环就可以将喷射管抽出固定环,进而更快速地拆装喷射管,操作简单方便,从而提高装置的使用效果。

图3 除锈机器人的转盘与撑板连接时的结构示意图
3.2 除锈机器人的吸附底盘结构设计
如图4 所示,这次设计的除锈机器人的吸附底盘包括底座,底座上开设第二凹槽,底座的前后端两侧均对称,安装驱动电机,其输出端贯穿底座,并延伸至底座的外侧,驱动电机的输出端安装齿轮,2 个齿轮上分别悬挂履带,齿轮与履带内侧凸出部互相嵌合连接,履带的外侧凸出部都是等间距对称的,安装吸盘并且履带的凸出部内部都开设第三凹槽,第三凹槽的内部也都有永磁铁,底座的前后两端都安装了把手。

图4 除锈机器人的底部结构设计示意图
这次的结构设计如下:在使用前,要将使用的设备放置并固定在第二凹槽的内部,将底座两侧的把手作为发力点,将设备整体送入化工罐内部,通过履带上的吸盘将履带吸附在罐体内壁上,启动驱动电机带动齿轮旋转,齿轮的旋转带动履带旋转,使搭载除锈设备的底盘通过吸盘罐体内壁上移动,对罐体内壁进行除锈工作,不需要操作人员进入,就可以解决传统除锈工艺的成本高、污染严重、损害工人健康以及效率低的问题,此外,在履带的凸出部内部设置永磁铁,当履带旋转移动时,通过永磁铁与罐体的磁铁吸附性,进一步加强整个设备在罐体上的吸附性,保证除锈工作正常进行。
另外,底座的两侧并且位于出气槽与驱动电机之间对称开设了第一凹槽,第一凹槽的内部都安装了蓄电池,第一凹槽的内部且位于蓄电池的两端均对称安装了阻挡板。
当安装设备时,将蓄电池与除锈设备相互连接,不需要考虑设备电源的问题,通过设置的阻挡板限制蓄电池在第一凹槽的移动,提高设备的运行稳定性。
如图5 所示,底座底部开设计1 个进气槽,进气槽的内部设置螺旋桨,进气槽的顶部且相对第二凹槽的底部设计了等间距对称的散热孔,进气槽的顶部两端也都对称设计了出气槽。螺旋桨的进气口设置1 个过滤板,螺旋桨的旋转叶片与进气槽顶部之间的距离大于螺旋桨底部与进气槽顶部之间的距离,螺旋桨底部的出气口也都是对称设计的。

图5 除锈机器人底部侧视图
这次的结构设计说明以下几点:在进行除锈工作的过程中,通过螺旋桨带动底座底部的空气通过进气槽进入底座内部并且通过进气槽顶部的散热孔为第二凹槽内部的除锈设备进行散热,从而使除锈设备稳定地工作,多余的空气则通过出气槽排出底座外部,由于螺旋桨旋转叶片正对罐体内壁,其旋转产生带动底座底部产生负压,进而将设备整体压在罐体内部,在对除锈设备进行散热的同时,提高设备的吸附力,保证设备稳定运行。
另外,在底座的两侧上方且位于出气槽的下方以及2 个蓄电池之间设计一个悬挂槽。当需要对设备进行探伤时,将探伤仪安装在悬挂槽内部并且通过蓄电池为其供电。
4 结语
机器人的使用不仅可以有效降低对工人身体的伤害,提高工作效率,而且减轻对环境的危害[3]。高压水射流技术爬壁机器人的主要作用就是携带超高压水射流清洗模块,安全可靠地吸附在壁面表面进行爬壁除锈工作。同时该技术是集爬壁、除锈、回收于一体的,除锈高压水射流技术爬壁机器人工作时是沿着壁面进行上下往复爬行工作的。这次的高压水射流技术爬壁机器人设计中,笔者针对传统除锈工艺的成本高、污染严重、损害工人健康以及效率低等问题,将机器人技术和高压水射流除锈技术进行整合,设计一款结合高压水射流技术的爬壁除锈机器人吸附底盘。通过支撑板、支撑柱、连杆和滑槽等结构的配合,可使连杆拉动支撑板在支撑柱上转动,从而快速调节喷射管的上下朝向,以便于灵活调整喷射角度,对于高压水射流技术而言,其不仅清洗、除锈效率高,而且可以降低设备清洗成本, 同时也不会损伤化工设备,所以其将成为化工企业最常用的清洗、除锈方式[4]。所以,高压水射流技术的爬壁除锈机器人也将会成为对化工罐除锈维护的重要技术,前景很广阔。
猜你喜欢
力学学报(2022年6期)2022-07-10
中国特种设备安全(2021年12期)2021-04-26
橡塑技术与装备(2021年6期)2021-03-19
模具制造(2019年7期)2019-09-25
制造技术与机床(2019年4期)2019-04-04
建筑科技(2018年6期)2018-08-30
广东石油化工学院学报(2016年6期)2016-05-17
焊接(2015年5期)2015-07-18
石油工程建设(2014年5期)2014-03-20
应用技术学报(2014年1期)2014-02-28
