
基于遗传算法的工业机器人时间最优轨迹规划及仿真研究
2023-05-30 10:48岳鹏飞
时代汽车 2023年1期
岳鹏飞
摘 要:“中国制造2025”战略的提出,给工业自动化的发展与应用带来了更加广阔的空间。工业机器人作为智能化工业生产的重要组成部分之一,其作业质量与工作效率,直接影响到我国工业现代化的实现速度。本文以工业机器人的轨迹规划作为研究方向,首先概述了工业机器人技术发展状况和应用前景;然后详细分析了遗传算法的工作原理与工业机器人轨迹规划时间最优问题;并以PUMA560工业机器人作为课题的研究对象,通过数学遗传算法函数规划的方式,探究工业机器人时间轨迹规划的最优计算方法;最后利用MATLAB实现程序代码编程、优化与仿真,建立规范化的最优轨迹方案。仿真结果证明,PUMA560工业机器人能够在特定遗传算法下高效完成工业制造任务。
关键词:遗传算法 函数 轨迹优化 PUMA560
1 引言
在科学技术的迅猛发展进程中,人工智能与自动化机械技术为工业机器人提供了越来越完善的自动化操作功能,也为社会生产与工业发展带来了越来越广泛的智能化与机械化技术支持[1]。当今时代的工业机器人,在人类的现实生产与生活中,占据了举足轻重的应用地位,其工作效率与工作质量的提高,将会给人类的工业生产带来更大的助益。与此同时,工业机器人在骤起骤停的实践化工作过程中,机械臂会出现一定的抖动现象。如果机械臂的抖动过于明显,则会直接影响到工业机器人的轨迹精度[2]。所以,通过遗传算法的技术手段,实时规划跟踪工业机器人的相应轨迹,实现机械臂各个节点的平稳、平滑运行,不仅能够促进工业机器人的智能化发展,还能够提高工业机器人的运作稳定性。从实用的角度来说,以时间最优为目标的工业机器人轨迹规划研究,对工业机器人技术的实践化应用,有着十分重要的指导性意义。
2 工业机器人技术的发展状况和应用前景
2.1 工业机器人的技术发展状况
从历史的角度来说,工业机器人的发展,最早起源于1954年。当时,美国工程师乔治·德沃尔以程序设计的方式,研制出世界上第一台工业机器人[3]。到了20世纪80 年代时期,信息技术为工业生产提供了高度的自动化与集成化,也为工业机器人带来了人工智能与机械化发展。经历了半个多世纪的发展,如今的工业机器人应用较为广泛,其应用领域已经拓展到世界各个行业,如:建筑、采矿、农业、勘探、国防、军事等等领域中,都能够看到工业机器人忙碌的身影。工业机器人技术的发展,在人类物质文明与精神生活方面,发挥了重要的影响与作用。
2.2 工业机器人技术的应用前景
工业机器人是伴随电气时代的进步而产生的,在信息技术与遗传学算法的不断完善过程中,工业机器人技术得到了不断地得到了不断的创新与改善[5]。从工业机器人的应用前景来看,PC技术促进了集成电路的发展速度,工业机器人的控制系统也随之向软、硬资源融合方向进步。标准化和网络化的PC技术,能够满足工业机器人的发展步伐,并能够促使工业机器人朝着开放式系统方向发展。工业机器人的温度、湿度等技术控制,需要依靠传感器来实现。因此,硬件传感器技术的嵌入式应用,是工业机器人未来发展的一大主要应用方向。与此同时,工业机器人的智能程度在AI技术的支持下,朝着更深入的逻辑分析、推理判断与数据规划方向发展,在不远的未来,汇集智能化、网络化与模块化特点的智能工业机器人,将会具有更加辽阔的应用空间与应用前景。而采用智能遗传算法,能够提高工业机器人的环境适应度,是保障工业机器人顺利完成质作业任务的最佳措施之一。
3 工业机器人的轨迹规划时间最优问题
3.1 遗传算法的工作原理
遗传算法(Genetic Algorithm)是人工智能技术中一项重要的循环计算寻优算法。从工业机器人的时间轨迹规划角度来看,它模仿人类的生物进化过程,以数学建模的算法求解方式,求得工业机器人所有可能的运动轨迹,并搜索运动轨迹的求解方案,从而找到最优时间轨迹。因此,基于遗传算法的工业机器人时间轨迹规划算法,具有应用方便、智能求解和鲁棒性较强等优点。
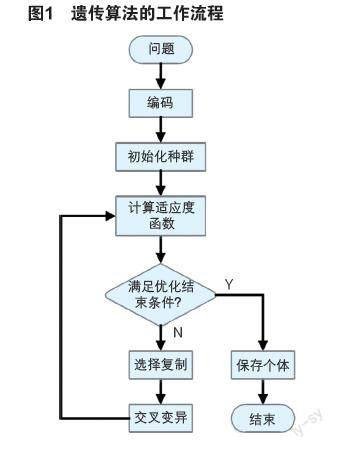
从算法的求解方法上来看,遗传算法是利用遗传算子,通过对子代种群的算法进行求解,从而获得更加有效的问题最优解。因此,对遗传算法的工作原理分析,是实现工业机器人轨迹规划时间求解的最佳求解方案。本课题中的遗传算法的求解方案為:从对PUMA560工业机器人轨迹规划问题的分析开始,首先针对不同关节点的轨迹时间规划问题进行遗传算法编码,然后对其子种群进行初始化,并设置基于人工智能的自适应函数。当自适应函数满足优化条件时,子代种群变异并继续遗传算法,求解到最优轨迹规划时间后,保存该最优数据。具体的工作流程如图1所示。
3.2 基于时间最优角度的工业机器人轨迹规划
3.2.1 约束条件规划
工业机器人的运动轨迹以特定的机器人运动关键节点为基础,为关键点(q)定义笛卡尔空间坐标,并把关键点对应的时间序列定义为t,设h是两个时间节点的时间间隔,则:
hi=ti+1-ti
T(hi)=h1+h2+…+hm-1=hi
这里的T(hi)指的是工业机器人从始点到终点的运行时间总和,而工业机器人再运动过程中,需要在各个关键节点处做到时间上的同步。所以,让机器人达到最优时间规划,就需要机器人的各个关节能够同步,如此才能降低轨迹复杂所带来的运动能量消耗。
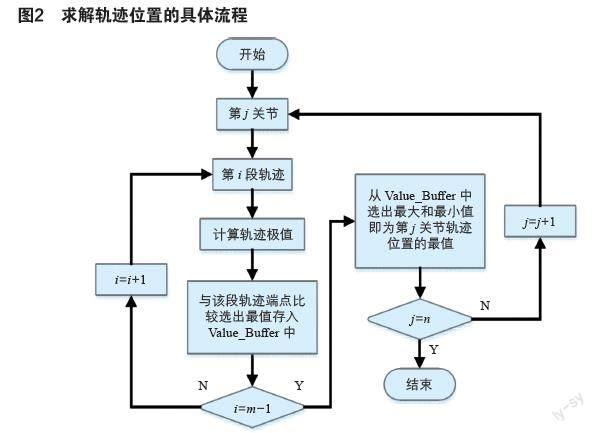
因此,需要对工业机器人的各个关节进行运动学约束。为了能够给工业机器人的各个关键运动轨迹带来方便,需要以关节约束的方式,描述关节位置的上、下限;根据关节最大速度求得关节的最大加速度绝对值;根据关节最大加速度求解工业机器人关节的最大二阶速度绝对值。因此,求解机器人关节点对应的轨迹位置时,需要对第j个关节节点的第i段轨迹极限值进行计算,并与该段轨迹端点比较,获得最大和最小极限值,存入value_Buffer数组中,在经过遗传算法的循环计算后,获得第j关节节点的轨迹位置最大和最小值。求解轨迹位置的具体流程,如图2所示。
3.3 求解轨迹函数最优解
在求解工业机器人运行轨迹的过程中,根据轨迹运行函数能够求解不同轨迹函数的最值,并根据复杂轨迹函数采用极值轨迹求解法确定轨迹函数的最值。借助Matlab求解轨迹函数的求解过程如下:
3.3.1 函数极值点轨迹求解
由于轨迹的求解函数属于人工智能范畴内,其数学函数的定义属于高阶多项式,使用Matlab解析solve()函数,能够获得应用位置的极限值。
3.3.2 函数极值点轨迹速度求解
工业机器人的轨迹运行速度函数也属于高阶多项式,所以在对其进行Matlab求解时,利用三根表达式来求得轨迹速度函数的极限值表达式(三个极值点)。
3.3.3 函数极值点轨迹加速度求解
建立工业机器人的节臂运动轨迹二阶函数,即:抛物线函数,求得极值点对应的函数顶点表达式。在确定关节点函数极值前,对相关的极值点进行校验,并带入轨迹函数极值中。
3.4 遗传算法求解轨迹函数关键源代码
3.4.1 变量初始化源代码
在使用种族遗传算法进行最优轨迹优化时,首先需要对工业机器人的种群规模和变异概率进行设置,其对应的代数设置数据为:
(1)进化代数设置:M=50;N=20;
(2)种群规模设置:Pm=0.3;
(3)变异概率设置:LC1=zeros(1,M);LC2=zeros(1,M);Yp=L1。
3.4.2 种群数据初始值设定
基于遗传算法的工业机器人各关节初始种群数据通过随机算法生成,其对应的源代码为:
X1=XY(R,1);Y1=XY(R,2);X2=XY(R,3);Y2=XY(R,4);
for i=1:N
farm{i}=rand(1,aaa);
End
3.4.3 双亲双子单点交叉遗传算法
在遗传算法的进化迭代过程中,需要设置迭代计数器counter=0,并为循环设置停止条件为达到最大迭代次数,即:while counter newfarm=cell(1,2*N);%用于存储子代的细胞结构 Ser=randperm(N);%两两随机配对的配对表 A=farm{Ser(1)};%取出父代A B=farm{Ser(2)};%取出父代B P0=unidrnd(aaa-1);%随机选择交叉点 a=[A(:,1:P0),B(:,(P0+1):end)];%产生子代a b=[B(:,1:P0),A(:,(P0+1):end)];%产生子代b newfarm{2*N-1}=a;%加入子代种群 newfarm{2*N}=b; for i=1:(N-1) A=farm{Ser(i)}; B=farm{Ser(i+1)}; newfarm{2*i}=b; end FARM=[farm,newfarm]。 4 时间最优轨迹规划仿真 为了能够确定本课题编码的遗传算法有效性,采用Matlab仿真实现遗传算法结果的数据分析,并通过仿真获得的数据值,计算工业机器人轨迹关键节点的最优轨迹信息。其中,把PUMA560工业机器人的关节关键起始点的速度设置为0,终止点的速度也设置为0,为其配置加速度为1,填写初始数据后展开工业机器人的时间最优轨迹规划仿真。具体的遗传算法仿真过程为: (1)设定工业机器人的所有关节运动学约束条件,并编写种群自适应函数源代码,优化该源代码的编写语句,达到时间最优。 (2)通过Matlab中提供的遗传算法,在定义的种群函数中设置指定的个体上下限,其它相关参数与变量采用默认设置值,展开时间最优轨迹的计算。 (3)优化轨迹计算过程,获得各段轨迹的最终时间优化仿真结果。 通过对优化結果的计算与仿真曲线数据值,能够计算出基于遗传算法的工业机器人时间最优轨迹规划的仿真结果,如表1所示: 从仿真的结果可以看出,三个关节点所对应的轨迹运行时间差较小,为了能够让各个关节点位置在时间上基本同步,需要针对时间轨迹选择最优关节点位置,从而保障各个关键节点之间的同步性。因此,调整关节节点位置,使得最终的仿真结果总时间和在时间上基本同步,如表2所示: 此时,三个关节节点走完时间最优轨迹所需要的时间,比遗传算法优化后的轨迹规划时间,在总时间方面有所减少,且呈现出更加良好的同步结果。仿真结果证明,改进后的遗传学算法在时间规划方面,实现了工业机器人的轨迹优化,能够让工业机器人的各个关节点在时间轨迹上基本同步。 5 结语 在工业机器人的机械化生产与应用过程中,时间效率与工作质量是评价其自身性能优劣的重要指标。本文以PUMA560工业机器人的时间轨迹规划作为研究对象,利用遗传算法对工业机器人各关节节点的运行时间进行优化,并在设定约束条件的基础上,以时间最优为目标,展开Matlab轨迹规划编码及仿真。仿真结果证明,优化算法的时间轨迹具有更加良好的规划性与可靠性。 参考文献: [1]殷凤健,梁庆华,程旭,陶志远.基于时间最优的机械臂关节空间轨迹规划算法[J].机械设计与研究,2017,33(05):12-15. [2]张舒曼.六自由度工业机器人轨迹规划研究及仿真[D].杭州电子科技大学,2015. [3]秦律,汪木兰,朱晓春,王保升.基于改进遗传算法的机器人时间最优轨迹规划[J].机械设计与制造工程,2018,47(11):63-67.
猜你喜欢
中学生数理化·中考版(2022年3期)2022-03-16
新世纪智能(数学备考)(2021年9期)2021-11-24
中学生数理化·中考版(2021年3期)2021-07-22
新世纪智能(数学备考)(2020年9期)2021-01-04
中学生数理化(高中版.高考数学)(2020年9期)2020-10-28
中学生数理化·中考版(2019年3期)2019-04-28
测控技术(2018年2期)2018-12-09
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
