
相控阵测控系统中的坐标系转换方法研究
2023-06-25 05:30潘恒康蒋浩仇明方孟景涛刘文魁
现代信息科技 2023年8期
潘恒康 蒋浩 仇明方 孟景涛 刘文魁

摘 要:在相控阵测控系统中,通常由波束控制软件将程序引导数据、数字引导数据以及目标跟踪数据等由各自坐标系转换成阵面设备采用坐标系所对应的数据,从而实现引导波束指向目标的功能。因此计算目标在不同坐标系下的位置是波束控制软件需要处理的重要工作之一。文章结合工程经验,对相控阵测控系统中常用的各个坐标系以及它们之间的转换关系进行分析,给出计算方法。相关计算方法描述清晰、简洁,可供该领域相关人员参考。
关键词:相控阵;测控;坐标转换
中图分类号:TN958.92 文献标识码:A 文章编号:2096-4706(2023)08-0060-04
Abstract: In the phased array TT&C system, the beam control software converts the program guidance data, digital guidance data and target tracking data from their respective coordinate systems into the corresponding data of the coordinate system used by the array equipment, for the purpose of guiding beam to the target. Therefore, calculating the position of the target in different coordinate systems is one of the important tasks to be handled by the beam control software. This paper combines with the engineering experience, analyzes frequently-used coordinates system and the transformation relationship between them in phased array TT&C system and gives the calculation method. The description of related calculation methods is clear and efficient, in hope of providing reference to relevant personnel in this field.
Keywords: phased array; TT&C; coordinate transformations
0 引 言
隨着我国航天测控领域的不断发展以及在轨卫星数量的快速增长,多目标测控成为当前航天测控发展的重要方向。相对于传统抛物面天线的测控系统,相控阵测控系统因其具有波束扫描速度快、可同时形成多波束等优点[1],得到越来越多的应用。
相控阵测控系统中,通常根据业务需要,由波束控制软件将目标的角度下发给数字波束形成(Digital Beam Forming, DBF)单元,控制阵面设备形成波束指向目标。一般系统设计中,DBF在引导波束指向的过程中所采用的坐标系通常为某一固定坐标系,而波束控制软件则根据业务需要,将不同坐标系下的角度转换成DBF所在坐标系的角度下发给DBF,从而引导波束指向目标。
目前相控阵测控系统可分为3种实现方案:单面相控阵天线加方位俯仰机械伺服方案、多面阵方案和球面阵方案[2]。另外,采用相控阵测控系统的测控站可分为固定站和机动战两种。由于应用场景不同,波束控制软件和DBF之间的角度转换方式也有不同。因此,坐标系转换问题是相控阵测控系统中波束控制软件需要解决的重点问题之一。
由于相控阵测控系统是一种新的测控通信架构,相关研究并不充分,工程实现较少[3]。文献[4]主要描述了固定站的坐标系定义及转换方法,其中并不涉及机动站中的坐标系转换。另外,现在程序引导的角度多为站心坐标系,可以不需要文献[4]中定义的地平坐标系。文献[5]主要描述了机载相控阵天线对地面的通信过程,由于应用场景的不同,一些使用到的坐标系和转换过程与相控阵测控系统并不相符。因此,本文结合实际经验,总结了相控阵测控系统中各种应用场景下的坐标系转换方法,为波束控制软件与DBF之间的坐标系转换的计算提供了理论依据。
1 相控阵测控系统中的坐标系
目前相控阵测控系统中,用到的坐标系主要包括以下几种,分别是地心坐标系、站心坐标系、视线坐标系、载体坐标系。其中,波束控制软件所处理的数字引导数据一般处于地心直角坐标系中、程序引导角度数据一般处于站心极坐标系中,波束控制软件接收到的角误差一般处于视线极坐标系中。对于DBF所采用的坐标系往往与测控系统的阵面结构、应用场景相关联。在单面相控阵天线加方位俯仰机械伺服的情况下,DBF对收发波束的引导采用视线极坐标系;在多面阵和球面阵的情况下,则可以根据固定站或机动站选择站心极坐标系或载体极坐标系来引导波束指向。
1.1 地心坐标系
地心坐标系是一种右手坐标系,如图1所示,其原定O为地球质心,X轴指向格林尼治子午线与地球赤道的交点,Z轴指向地球北极,Y轴垂直于XOZ平面。
1.2 站心坐标系
站心坐标系是一种左手坐标系,如图2所示,其原点O为观测设备的天线中心,即站心,Z轴与过原点的参考椭球面的法线重合,指向天顶为正,X轴垂直于Z轴,指向参考椭球的短半轴,向北为正,Y轴与X轴、Z轴垂直。
1.3 视线坐标系
视线坐标系是一种左手坐标系,如图3所示,其原点O为观测设备的天线中心,X轴为波束指向,Y轴指向水平方向,Z轴指向俯仰方向,目标矢量OM,M向XOY平面做垂线MN,投影ON,其中,俯仰角误差表示为∠MON,即目标与波束指向的俯仰角差值,方位角误差表示为∠XON,即目标与波束指向的俯仰角的差值。
1.4 载体坐标系
载体坐标系是一种右手坐标系,如图4所示,其原点O为载体的质心,X轴为载体参考平面内平行于车身轴线并指向前方,Y轴为载体参考平面内垂直于车身轴线并指向右,Z轴垂直于载体参考平面指向上方。
在机动站中,通常用一组姿态角来描述载体的空间姿态。当获取到姿态角后,即可将目标的位置转换到载体坐标系中。姿态角包括:横滚角,载体横轴与水平线之间的夹角,向右滚为正,反之为负;俯仰角,载体纵轴与水平面的夹角,向上为正,反之为负;航向角,载体的纵轴与地球北极之间的夹角,顺时针为正,又称真航向角。
1.5 直角坐标系与极坐标系的转换关系
假设目标在直角坐标系中的坐标为(x, y, z),在对应极坐标系中的坐标为 ,其中极坐标系的原点与直角坐标系重合,以水平面(XOY)为基准面,以X轴为极轴,ρ为目标到原点的距离,θ为极坐标下的方位角, 为极坐标系下的俯仰角度。直角坐标系与极坐标系相互之间的转换关系如下。
1.5.1 直角坐标系转极坐标系
2 坐标系转换方法
2.1 右手坐标系下的转换过程
一个空间直角坐标系通常可以经过平移和旋转得到另一个空间直角坐标系,其旋转过程主要依赖变换矩阵[6],主要过程如下。
假设目标位于同一原点的两个参考系中,两个参考系均为右手坐标系,在参考系OXAYAZA中,目标分量VA为VA=[xa ya za],而在参考系OXBYBZB中,目标分量VB为VB=[xb yb zb],两个参考系之间的变换关系为VB=LABVA,其中LAB即为从参考系OXAYAZA到参考系OXBYBZB的变换矩阵。
假设坐标系OXAYAZA绕X轴,Y轴和Z轴逆时针转过的角度分别为α、β和γ,其旋转过程可由三个基本旋转矩阵表示:
2.2 左手坐标系下的转换过程
假设参考系OXAYAZA、参考系OXBYBZB均为左手坐标系,若从参考系OXAYAZA旋转到参考系OXBYBZB中,旋转矩阵同上述L(α, β, γ),但需要将α、β和γ的取值改为绕X轴,Y轴和Z轴顺时针转过的角度即可。
2.3 右手坐标系与左手坐标系之间的转换
假设参考系OXAYAZA为右手坐标系,参考系OXBYBZB为左手坐标系,其相互之间的转换,需要乘以转换矩阵:
3 相控阵测控系统中的坐标转换
在相控阵测控系统中,波束控制软件通常在不同的工作模式(主要包括:数字引导、指向、程序引导、自跟踪等)下,需要将目标所在的空间位置从某一坐标系中转换到不同坐标系中。其中站心坐标系、载体坐标系能够直观反映目标位置信息与测控站的空间位置,因此通常需要在波束控制软件界面上显示,方便用户观测。由于不同的相控阵测控系统的阵面结构、应用场景有所不同,DBF根据系统设计,可采用的坐标系有视线坐标系、站心坐标系、载体坐标系等。
数字引导工作模式中,一般用到的坐標系转换为:地心坐标系转站心坐标系、站心坐标系转载体坐标系、站心坐标系转视线坐标系、载体坐标系转视线坐标系、视线坐标系转载体坐标系、视线坐标系转站心坐标系、载体坐标系转站心坐标系等。
指向和程序引导工作模式中,一般用到的坐标系转换为:站心坐标系转载体坐标系、站心坐标系转视线坐标系、载体坐标系转视线坐标系、视线坐标系转载体坐标系、视线坐标系转站心坐标系、载体坐标系转站心坐标系等。
自跟踪工作模式中,一般用到的坐标系转换为视线坐标系转载体坐标系、视线坐标系转站心坐标系、载体坐标系转站心坐标系等。
虽然相控阵测控系统中的阵面结构、应用场景等会使得波束控制软件在处理坐标系转换的问题上变得复杂,但是均可通过基本的转换方法实现。基本的坐标系转换方法包括:地心坐标系转站心坐标系、站心坐标系与视线坐标系的相互转换、站心坐标系与载体坐标系的相互转换、载体坐标系与视线坐标系的相互转换。
3.1 地心坐标系转站心坐标系
假设目标在地心坐标系中的位置(xG, yG, zG),在站心坐标系中的位置为(x, y, z),测控站的经纬高(Lon,Lat,Ht),其转换过程为:
其中,a为地球平均半径,我国常用的大地坐标系是2000国家大地坐标系(CGCS2000),CGCS2000采用椭球第一偏心率为0.081 819 191 042 8[7],地球赤道半径为6 378 137 m。
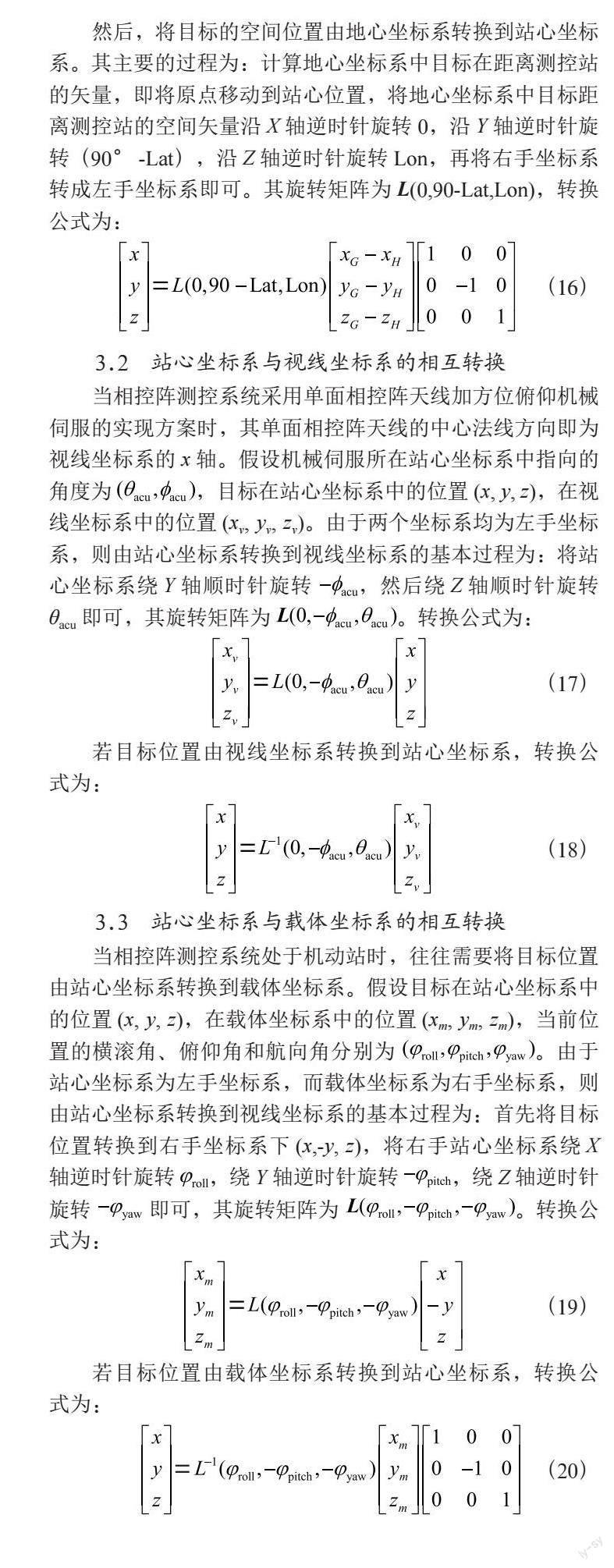
然后,将目标的空间位置由地心坐标系转换到站心坐标系。其主要的过程为:计算地心坐标系中目标在距离测控站的矢量,即将原点移动到站心位置,将地心坐标系中目标距离测控站的空间矢量沿X轴逆时针旋转0,沿Y轴逆时针旋转(90°-Lat),沿Z轴逆时针旋转Lon,再将右手坐标系转成左手坐标系即可。其旋转矩阵为L(0,90-Lat,Lon),转换公式为:
3.2 站心坐标系与视线坐标系的相互转换
当相控阵测控系统采用单面相控阵天线加方位俯仰机械伺服的实现方案时,其单面相控阵天线的中心法线方向即为视线坐标系的x轴。假设机械伺服所在站心坐标系中指向的角度为 ,目标在站心坐标系中的位置(x, y, z),在视线坐标系中的位置(xv, yv, zv)。由于两个坐标系均为左手坐标系,则由站心坐标系转换到视线坐标系的基本过程为:将站心坐标系绕Y轴顺时针旋转 ,然后绕Z轴顺时针旋转θacu即可,其旋转矩阵为 。转换公式为:
3.3 站心坐标系与载体坐标系的相互转换
当相控阵测控系统处于机动站时,往往需要将目标位置由站心坐标系转换到载体坐标系。假设目标在站心坐标系中的位置(x, y, z),在载体坐标系中的位置(xm, ym, zm),当前位置的横滚角、俯仰角和航向角分别为 。由于站心坐标系为左手坐标系,而载体坐标系为右手坐标系,则由站心坐标系转换到视线坐标系的基本过程为:首先将目标位置转换到右手坐标系下(x,-y, z),将右手站心坐标系绕X轴逆时针旋转 ,绕Y轴逆时针旋转 ,绕Z轴逆时针旋转 即可,其旋转矩阵为 。转换公式为:
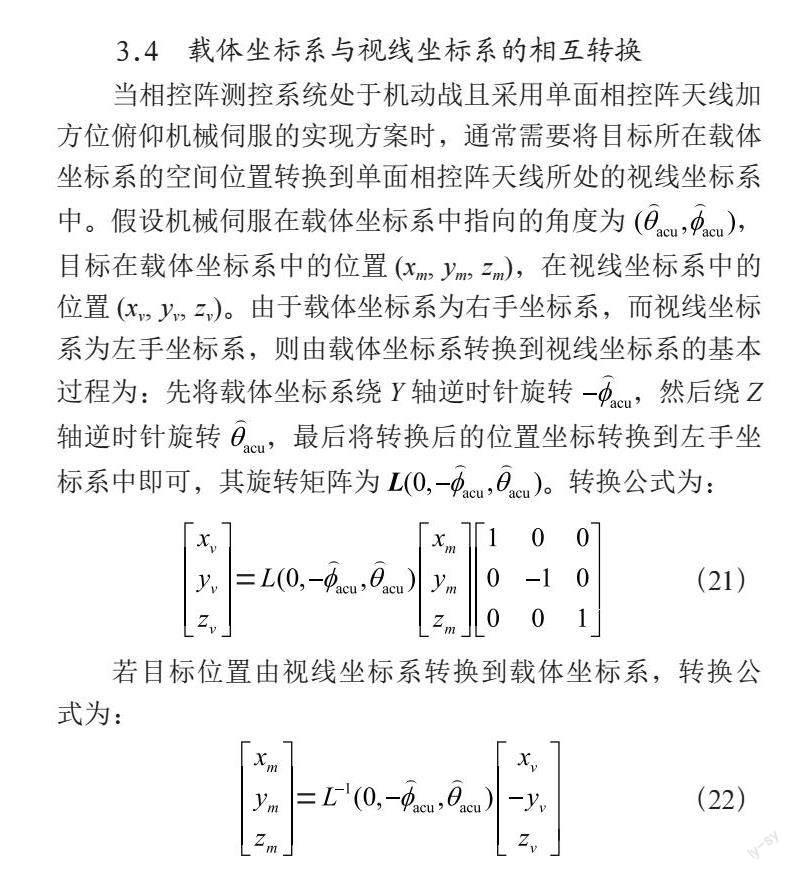
3.4 载体坐标系与视线坐标系的相互转换
当相控阵测控系统处于机动战且采用单面相控阵天线加方位俯仰机械伺服的实现方案时,通常需要将目标所在载体坐标系的空间位置转换到单面相控阵天线所处的视线坐标系中。假设机械伺服在载体坐标系中指向的角度为 ,目标在载体坐标系中的位置(xm, ym, zm),在视线坐标系中的位置(xv, yv, zv)。由于载体坐标系为右手坐标系,而视线坐标系为左手坐标系,则由载体坐标系转换到视线坐标系的基本过程为:先将载体坐标系绕Y轴逆时针旋转 ,然后绕Z轴逆时针旋转 ,最后将转换后的位置坐标转换到左手坐标系中即可,其旋转矩阵为 。转换公式为:
4 结 论
本文主要针对相控阵测控系统,根据工程经验,总结其中常用的坐标系并分析各种坐标系之间的转换关系。相关的转换方法已成功应用于我国多套相控阵测控系统中,为后续相关工程应用提供理论依据。
参考文献:
[1] 俞力,马海波.相控阵天线的相位方向图研究 [J].现代信息科技,2020,4(20):67-70.
[2] 吴海洲,王鹏毅,郭肃丽.全空域相控阵测控系统波束形成分析 [J].无线电工程,2011,41(11):13-15.
[3] 杜丹,王文政,扈景召.全空域球面相控阵测控系统角跟踪方法概论 [J].电讯技术,2021,61(7):800-806.
[4] 耿虎军,郭肃丽,王鹏毅,等.相控阵多目标测控系统中的坐标转换 [J].飞行器测控学报,2010,29(6):24-28.
[5] 荣笑,张彬诚.一种相控阵天线波束指向角计算方法 [J].现代信息科技,2021,5(21):78-81.
[6] 潘恒康.船用导航雷达数据处理技术研究 [D].哈尔滨:哈尔滨工业大学,2017.
[7] 陈成,金立新,李忠美.常用纬度与地心纬度差异分析 [J].海军工程大学学报,2018,30(2):72-77.
作者简介:潘恒康(1992—),男,汉族,山东德州人,工程师,硕士,研究方向:航天測控软件设计与开发;蒋浩(1995—),男,汉族,重庆云阳人,助理工程师,本科,研究方向:航天测运控;仇明方(1991—),男,汉族,山东青岛人,技师,本科,研究方向:测量与控制;孟景涛(1985—),男,汉族,河北邢台人,工程师,本科,研究方向:航天测控软件设计与开发;刘文魁(1990—),男,汉族,山东滨州人,测控技师,本科,研究方向:航天测运控。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
电子制作(2019年24期)2019-02-23
电子测试(2018年22期)2018-12-19
电子测试(2018年15期)2018-09-26
价值工程(2017年8期)2017-03-25
环球人文地理·评论版(2016年8期)2017-01-19
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
现代电子技术(2015年18期)2015-09-16
