空空导弹变胞型弹射分离机构技术研究
2023-06-25 23:27刘浩沈欣
航空兵器 2023年2期
刘浩 沈欣

摘要: 为满足战机在全飞行包线下安全发射分离空空导弹, 空空导弹相对战机的分离姿态需要大范围自适应可调, 现阶段只能产生固定分离姿态的弹射分离机构已不满足要求。 针对该问题, 提出变胞型弹射分离机构设计概念, 在弹射机构特定铰链处采用变胞PR-R运动副代替传统的铰链运动副, 实时改变弹射机构前推臂、 后推臂对导弹的弹射作用力, 从而实现导弹弹射分离姿态的大范围可调。 建立变胞型导弹弹射机构的多体动力学模型, 进行了动力学仿真分析。 结果表明, 所提出的变胞型弹射机构设计概念能够大范围调节导弹弹射分离姿态角速度, 为机载导弹弹射机构进一步实现实时智能化控制奠定了基础。
关键词: 空空导弹; 变胞; 发射安全性; 自适应; 弹射机构; 多体动力学; 智能结构中图分类号: TJ760
文献标识码: A文章编号: 1673-5048(2023)02-0064-06
DOI: 10.12132/ISSN.1673-5048.2022.0232
0引言
机载导弹弹射机构的作用是给与导弹一定的初始速度和初始角速度, 使导弹迅速脱离载机, 避免导弹在气动力作用下向上飞行回撞载机。 现阶段, 机载导弹弹射机构在设计上均只能赋予导弹固定的初始速度和初始角速度, 但随着载机的飞行速度和机动性越来越高, 固定的初始速度和初始角速度难以保证载机在全飞行包线下的发射安全性, 亟待研发分离参数可大范围调节的新型智能型弹射机构。
现阶段学术界和工业界对机载导弹弹射技术已进行相当的研究, 并取得了较好的成果, 主要包括气动流场对机弹分离安全的影响、 弹射机构设计及动力学研究, 以及地面试验验证技术等。 在气动流场对机弹分离安全的影响方面, Flora[1]和Merrick [2]研究了导弹在气流作用下的自由下落轨迹和姿态问题, 指出在复杂气流作用下, 导弹姿态变化剧烈, 给发射安全带来隐患; 闫盼盼等[3]采用改进的延迟分离涡模拟方法结合动网格技术, 对内埋弹射分离过程的三维流场进行非定常计算, 得到了不同来流马赫数、 弹体发射速度和初始角速度等参数对弹体下落轨迹的影响规律; 张群峰等[4]基于重叠网格技术, 对外挂投放和内埋投放进行了数值模拟对比, 得到了亚声速和超声速条件下外挂投放与内埋投放弹体的下落规律, 指出为了保证内埋式导弹发射安全性, 导弹的初始低头角速度至关重要。 在弹射机构设计及其分离动力学仿真方面, 李海军等[5]通过ADAMS软件建立了简易的导弹发射装置模型, 对弹射机构进行了导弹分离姿态变化过程仿真, 得到导弹分离的俯仰角变化曲线; 祁武超等[6]通过对舱体结构挂点处分别进行刚性或柔性化处理, 得到挂点连接形式对冲击载荷的影响, 研究了不同类型作动筒输出的作动力形式和峰值与冲击载荷特性之间关系; 刘南宏等[7]以筒式压缩空气弹射系统为研究对象, 开展了弹射系统内弹道性能的仿真与实验研究。 在地面试验验证方面, 宋威等[8]采用基于动力学相似的风洞投放试验对先进战斗机内埋武器投放分离相容性进行预测与评估, 给出了内埋导弹从载机弹舱投放分离后的運动轨迹和俯仰姿态角变化规律, 指出分离过程中可能存在机弹相撞的风险; 薛飞等[9]研究了内埋导弹高速投放的风洞试验技术, 所设计的弹射机构具有弹射分离速度和角速度的调节能力, 但调节系统庞大, 只能作为地面试验设备使用, 不能作为机载装备使用; 王帅等[10]针对内埋武器高速风洞投放试验的需求, 设计了一套新型双气缸弹射机构, 并利用运动仿真软件对所设计的弹射机构进行仿真分析, 但所设计的双气缸弹射机构笨重, 在免维护条件下缺乏自动挂弹收弹功能, 只能作为试验设备用于风动试验。
可以看出, 现阶段对具有单一弹射分离参数的机载导弹弹射机构已进行了较多研究, 在地面弹射试验设备方面也开展了初步的分离速度和分离角速度可调技术研究, 但是地面弹射试验设备所采用的调节技术主要是通过调节动力输出, 导致动力装置和液压阀等调节装置过于笨重, 且往往还需要人工参与调整机构参数或导弹挂装位置, 在机载装备上难以采用。 总体来说, 对弹射分离参数空中实时可调的智能型弹射机构研究还处于起步阶段。 本文提出一种变胞型弹射机构, 拟通过对机构变胞环节设计参数的实时调节, 实现弹射分离姿态参数的大范围调节, 该设计概念具有调节机构小巧、 调节能力强的优点。
1机载导弹弹射机构构型
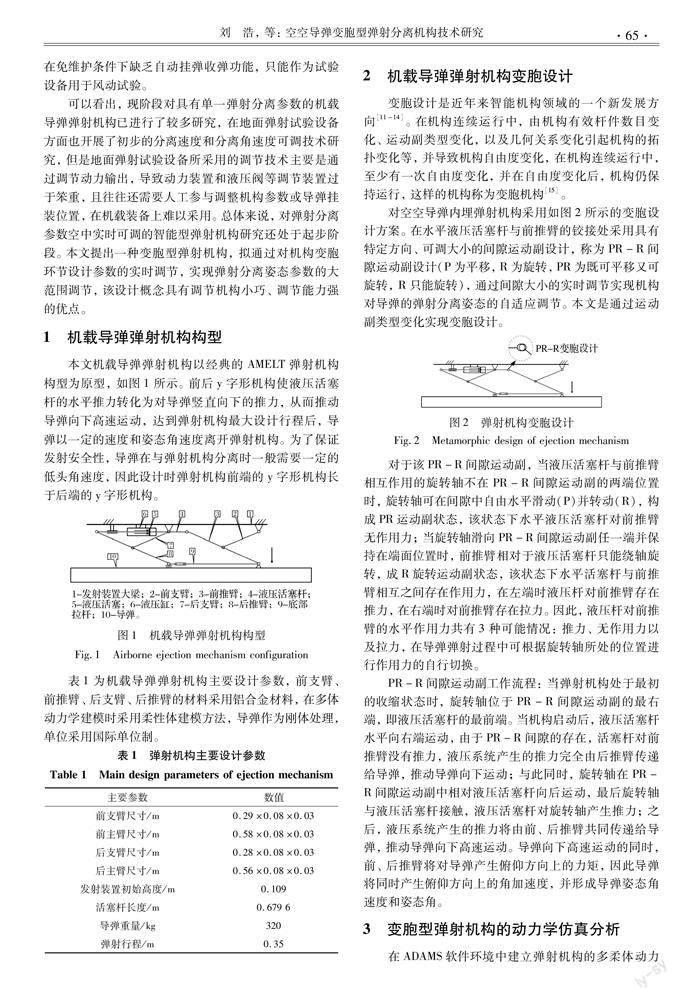
本文机载导弹弹射机构以经典的AMELT弹射机构构型为原型, 如图1所示。 前后y字形机构使液压活塞杆的水平推力转化为对导弹竖直向下的推力, 从而推动导弹向下高速运动, 达到弹射机构最大设计行程后, 导弹以一定的速度和姿态角速度离开弹射机构。 为了保证发射安全性, 导弹在与弹射机构分离时一般需要一定的低头角速度, 因此设计时弹射机构前端的y字形机构长于后端的y字形机构。
表1为机载导弹弹射机构主要设计参数, 前支臂、 前推臂、 后支臂、 后推臂的材料采用铝合金材料, 在多体动力学建模时采用柔性体建模方法, 导弹作为刚体处理, 单位采用国际单位制。
2机载导弹弹射机构变胞设计
变胞设计是近年来智能机构领域的一个新发展方向[11-14]。 在机构连续运行中, 由机构有效杆件数目变化、 运动副类型变化, 以及几何关系变化引起机构的拓扑变化等, 并导致机构自由度变化, 在机构连续运行中, 至少有一次自由度变化, 并在自由度变化后, 机构仍保持运行, 这样的机构称为变胞机构[15]。
对空空导弹内埋弹射机构采用如图2所示的变胞设计方案。 在水平液压活塞杆与前推臂的铰接处采用具有特定方向、 可调大小的间隙运动副设计, 称为PR-R间隙运动副设计(P为平移, R为旋转, PR为既可平移又可旋转, R只能旋转), 通过间隙大小的实时调节实现机构对导弹的弹射分离姿态的自适应调节。 本文是通过运动副类型变化实现变胞设计。
对于该PR-R间隙运动副, 当液压活塞杆与前推臂相互作用的旋转轴不在PR-R间隙运动副的两端位置时, 旋转轴可在间隙中自由水平滑动(P)并转动(R), 构成PR运动副状态, 该状态下水平液压活塞杆对前推臂无作用力; 当旋转轴滑向PR-R间隙运动副任一端并保持在端面位置时, 前推臂相对于液压活塞杆只能绕轴旋转, 成R旋转运动副状态, 该状态下水平活塞杆与前推臂相互之间存在作用力, 在左端时液压杆对前推臂存在推力, 在右端时对前推臂存在拉力。 因此, 液压杆对前推臂的水平作用力共有3种可能情况: 推力、 无作用力以及拉力, 在导弹弹射过程中可根据旋转轴所处的位置进行作用力的自行切换。
PR-R间隙运动副工作流程: 当弹射机构处于最初的收缩状态时, 旋转轴位于PR-R间隙运动副的最右端, 即液压活塞杆的最前端。 当机构启动后, 液压活塞杆水平向右端运动, 由于PR-R间隙的存在, 活塞杆对前推臂没有推力, 液压系统产生的推力完全由后推臂传递给导弹, 推动导弹向下运动; 与此同时, 旋转轴在PR-R间隙运动副中相对液压活塞杆向后运动, 最后旋转轴与液压活塞杆接触, 液压活塞杆对旋转轴产生推力; 之后, 液压系统产生的推力将由前、 后推臂共同传递给导弹, 推动导弹向下高速运动。 导弹向下高速运动的同时, 前、 后推臂将对导弹产生俯仰方向上的力矩, 因此导弹将同时产生俯仰方向上的角加速度, 并形成导弹姿态角速度和姿态角。
3变胞型弹射机构的动力学仿真分析
在ADAMS软件环境中建立弹射机构的多柔体动力学模型[16], 各构件的拓扑关系如表2所示, 该表是一个对称矩阵表。 为了实现各构件的高精度柔性化, 可在有限元软件中对前支臂、 前推臂、 后支臂、 后推臂、 液压活塞杆、 底部拉杆等构件进行模态分析, 生成MNF模态中性文件, 并导入ADAMS中进行模型组装。 综合考虑计算规模和计算精度, 各模态取前30阶即可。 在仿真设置时, 综合考虑计算稳定性和计算精度, 计算步长拟设置在0.1~0.5 ms, 且采用可变步长。 PR-R变胞运动副可直接通过ADAMS的CONTACT接触函数输入, 接触刚度取1×106, 阻尼系数取0.01, CONTACT可实时自动监测两构件是否接触, 以及两构件相互之间的接触嵌入深度, 从而计算两构件之间的接触力。
对采用变胞设计的弹射机构动力学特性进行仿真分析, 重点是前推臂/后推臂对导弹的作用力以及弹射分离姿态角速度的调节能力, 最后仿真分析了弹射分离速度, 分析弹射机构采用变胞设计后对分离速度是否存在负面影响。
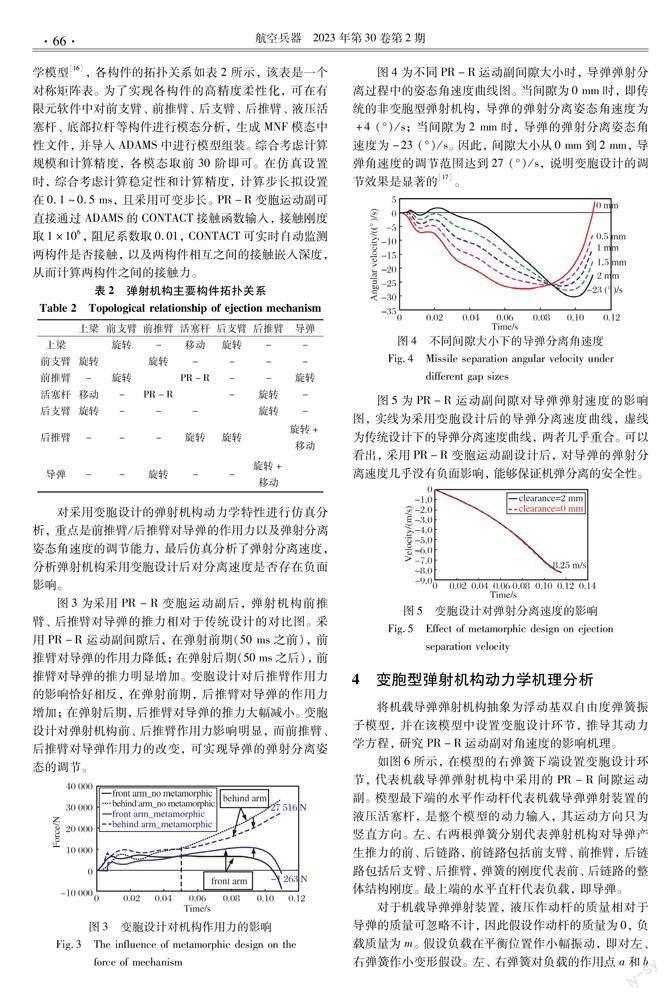
图3为采用PR-R变胞运动副后, 弹射机构前推臂、 后推臂对导弹的推力相对于传统设计的对比图。 采用PR-R运动副间隙后, 在弹射前期(50 ms之前), 前推臂对导弹的作用力降低; 在弹射后期(50 ms之后), 前推臂对导弹的推力明显增加。 变胞设计对后推臂作用力的影响恰好相反, 在弹射前期, 后推臂对导弹的作用力增加; 在弹射后期, 后推臂对导弹的推力大幅减小。 变胞设计对弹射机构前、 后推臂作用力影响明显, 而前推臂、 后推臂对导弹作用力的改变, 可实现导弹的弹射分离姿态的调节。
图4为不同PR-R运动副间隙大小时, 导弹弹射分离过程中的姿态角速度曲线圖。 当间隙为0 mm时, 即传统的非变胞型弹射机构, 导弹的弹射分离姿态角速度为+4 (°)/s; 当间隙为2 mm时, 导弹的弹射分离姿态角速度为-23 (°)/s。 因此, 间隙大小从0 mm到2 mm, 导弹角速度的调节范围达到27 (°)/s, 说明变胞设计的调节效果是显著的[17]。
图5为PR-R运动副间隙对导弹弹射速度的影响图, 实线为采用变胞设计后的导弹分离速度曲线, 虚线为传统设计下的导弹分离速度曲线, 两者几乎重合。 可以看出, 采用PR-R变胞运动副设计后, 对导弹的弹射分离速度几乎没有负面影响, 能够保证机弹分离的安全性。
4变胞型弹射机构动力学机理分析
将机载导弹弹射机构抽象为浮动基双自由度弹簧振子模型, 并在该模型中设置变胞设计环节, 推导其动力学方程, 研究PR-R运动副对角速度的影响机理。
如图6所示, 在模型的右弹簧下端设置变胞设计环节, 代表机载导弹弹射机构中采用的PR-R间隙运动副。 模型最下端的水平作动杆代表机载导弹弹射装置的液压活塞杆, 是整个模型的动力输入, 其运动方向只为竖直方向。 左、 右两根弹簧分别代表弹射机构对导弹产生推力的前、 后链路, 前链路包括前支臂、 前推臂, 后链路包括后支臂、 后推臂, 弹簧的刚度代表前、 后链路的整体结构刚度。 最上端的水平直杆代表负载, 即导弹。
对于机载导弹弹射装置, 液压作动杆的质量相对于导弹的质量可忽略不计, 因此假设作动杆的质量为0, 负载质量为m。 假设负载在平衡位置作小幅振动, 即对左、 右弹簧作小变形假设。 左、 右弹簧对负载的作用点a和b只能作上下运动, a和b之间的距离可变。 弹簧暂只考虑刚度, 不考虑阻尼, 也不考虑弹簧的质量。 带间隙的浮动基双自由度弹簧振子模型存在两个状态, 一是右弹簧与作动杆不接触状态; 二是右弹簧与作动杆接触状态。 两者之间根据是否接触存在拓扑关系的切换。
通过式(18)~(19)可以看出, 左、 右弹簧的作用力除了按自身刚度k1和k2对总的推力进行等比例分配外, 还受负载姿态角θ的影响, 且左、 右弹簧所受的影响等大反向, 结合式(6), 说明左、 右弹簧的作用力与负载姿态角互相耦合。 因此, 左、 右弹簧的作用力并不是在非变胞设计的基础上简单叠加由间隙运动副引起的恒定附加力, 该结论能够有效解释图3的前、 后推臂复杂的作用力变化特性。 通过浮动基双自由度弹簧振子模型的动力学机理可知, 弹射机构前推臂、 后推臂的作用力与导弹实时姿态角耦合, 前推臂、 后推臂对导弹的作用力不仅受弹射动力和机构刚度影响, 还受导弹自身实时姿态角影响, 而导弹的姿态又是由于前、 后推臂的作用力产生的, 机载导弹弹射机构具有较复杂的动力学特性。
5结论
现阶段, 机载导弹弹射机构还只能产生单一的分离参数, 不能自适应调节, 无法满足战机全包线发射需求, 为此, 开展了空空导弹变胞型弹射分离机构技术研究, 主要结论如下:
(1) 在液压活塞杆与前推臂铰接处采用PR-R间隙运动副, 具备大范围调节导弹的分离姿态角速度的能力, 利用2 mm间隙就能调节27°的分离角速度, 使弹射机构满足未来高机动战机的全包线发射要求。
(2) PR-R间隙运动副使弹射机构前推臂、 后推臂施加了一个大小相等、 方向相反且与间隙大小成正比的附加力, 该作用力对导弹形成了一个恒定的附加力矩, 从而实现导弹弹射分离姿态角速度的大范围调节。
(3) 弹射机构前推臂、 后推臂的作用力与导弹实时姿态耦合, 前推臂、 后推臂对导弹的作用力不仅受弹射动力和机构刚度影响, 还受导弹自身实时姿态影响, 并非简单叠加变胞设计带来的恒定附加力, 其动力学特性较为复杂; 在开展前期理论分析时, 考虑到导弹弹射过程中姿态角在工程上一般在1°以内, 因此可通过线性化假设简化研究, 在需要高精度量化研究时, 仍需要在ADAMS环境中建立大型仿真模型并进行数字仿真。
(4) PR-R间隙运动副几乎不影响导弹的分离速度, 不会对分离速度产生负面效应, 实现了弹射分离速度和弹射分离角速度的解耦设计, 提高了弹射机构的总体性能。
(5) 提出的浮动基双自由度弹簧振子模型能够有效反应机载导弹弹射机构的动力学特性, 为须考虑柔性效应的新型弹射机构总体方案快速设计提供了理论方法。
参考文献:
[1] Flora T J. Freedrop Testing and CFD Simulation of Ice Models from a Cavity into Supersonic Flow, AFIT/GAE/ENY/12-S15[R]. Ohio: Wright Patterson Air Force Base, 2012.
[2] Merrick J D. Influence of Mach Number and Dynamic Pressure on Cavity Tones and Freedrop Trajectories, AFIT-ENY-14-M-3 6[R]. Ohio: Wright Patterson Air Force Base, 2014.
[3] 闫盼盼, 张群峰, 金明, 等. 内埋武器发射参数对下落轨迹的影响[J]. 工程力学, 2018, 35(1): 246-256.Yan Panpan, Zhang Qunfeng, Jin Ming, et al. Effects of Launching Parameters on the Separation Trajectory of Internal Weapons[J]. Engineering Mechanics, 2018, 35(1): 246-256.(in Chinese)
[4] 张群峰, 闫盼盼, 黎军. 战斗机武器外挂投放与内埋投放比较[J]. 北京航空航天大学学报, 2017, 43(6): 1085-1097.Zhang Qunfeng, Yan Panpan, Li Jun. Comparison between External Store Separation and Buried Store Separation of Fighter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1085-1097.(in Chinese)
[5] 李海军, 王雷, 方轶. 基于ADAMS的内埋式导弹发射俯仰角变化仿真分析[J]. 液压与气动, 2020(1): 159-162.Li Haijun, Wang Lei, Fang Yi. Simulation Analysis of Propagation Pitch Angle Change of Embedded Missile Based on ADAMS[J]. Chinese Hydraulics & Pneumatics, 2020(1): 159-162.(in Chinese)
[6] 祁武超, 刘恒, 金德玉. 内埋弹舱弹射冲击载荷特性研究[J]. 兵工学报, 2019, 40(4): 889-896.Qi Wuchao, Liu Heng, Jin Deyu. Research on the Impact Load Characteristics of Embedded Missile Bay[J]. Acta Armamentarii, 2019, 40(4): 889-896.(in Chinese)
[7] 刘南宏, 张新敬, 徐玉杰, 等. 筒式压缩空气弹射系统内弹道性能研究[J]. 兵器装备工程学报, 2022, 43(1): 79-85.Liu Nanhong, Zhang Xinjing, Xu Yujie, et al. Study on Interior Ballistic Performance of Cylindrical Compressed Air Catapult Launch System[J]. Journal of Ordnance Equipment Engineering, 2022, 43(1): 79-85.(in Chinese)
[8] 宋威, 艾邦成, 蒋增辉, 等. 内埋武器投放分离相容性的风洞投放試验预测与评估[J]. 航空学报, 2020, 41(6): 523415.Song Wei, Ai Bangcheng, Jiang Zenghui, et al. Prediction and Assessment of Drop Separation Compatibility of Internal Weapons by Wind Tunnel Drop-Test[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 523415.(in Chinese)
[9] 薛飛, 金鑫, 王誉超, 等. 内埋武器高速投放风洞试验技术[J]. 航空学报, 2017, 38(1): 120114.Xue Fei, Jin Xin, Wang Yuchao, et al. Wind Tunnel Test Technique on High Speed Weapon Delivery from Internal Weapons Bay[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(1): 120114.(in Chinese)
[10] 王帅, 董金刚, 张晨凯, 等. 高速风洞投放试验弹射机构及试验研究[J]. 实验流体力学, 2021, 35(6): 73-78.Wang Shuai, Dong Jingang, Zhang Chenkai, et al. The Study of Ejection Mechanism and Drop-Test in High-Speed Wind Tunnel[J]. Journal of Experiments in Fluid Mechanics, 2021, 35(6): 73-78.(in Chinese)
[11] 戴建生, 安伟, 王瑞钦, 等. 基于可重构虎克铰链副的仿人变胞手设计与分析[J]. 天津大学学报: 自然科学与工程技术版, 2022, 55(3): 221-229.Dai Jiansheng, An Wei, Wang Ruiqin, et al. Design and Analysis of a Humanoid Metamorphic Hand Based on Reconfigurable Hooke Joints[J]. Journal of Tianjin University: Science and Technology, 2022, 55(3): 221-229.(in Chinese)
[12] Li S J. Task-Based Structure Synthesis of Source Metamorphic Mechanisms and Constrained Forms of Metamorphic Joints[J]. Mechanism and Machine Theory, 2016, 96: 334-345.
[13] Jin X, Fang Y, Zhang D, et al. Synthesis of 3-[P][S]Parallel Mechanism-Inspired Multimode Dexterous Hands with Parallel Finger Structure [J]. Journal of Mechanical Design, 2020, 142(8): 083301.
[14] Zhang W X, Wu T, Ding X L. An Optimization Method for Metamorphic Mechanisms Based on Multidisciplinary Design Optimization[J]. Chinese Journal of Aeronautics, 2014, 27(6): 1612-1618.
[15] 康熙, 戴建生. 机构学中机构重构的理论难点与研究进展——变胞机构演变内涵、 分岔机理、 设计综合及其应用[J]. 中国机械工程, 2020, 31(1): 57-71.Kang Xi, Dai Jiansheng. Theoretical Difficulties and Research Progresses of Mechanism Reconfiguration in Mechanisms-Evolution Connotation, Furcation Principle, Design Synthesis and Application of Metamorphic Mechanisms[J]. China Mechanical Engineering, 2020, 31(1): 57-71.(in Chinese)
[16] 王清海. 机载内埋武器弹射发射多柔体动力学分析[J]. 航空兵器, 2021, 28(1): 66-71.Wang Qinghai. Dynamics Analysis of Multi-Flexible Body Ejection of Airborne Embedded Weapon[J]. Aero Weaponry, 2021, 28(1): 66-71.(in Chinese)
[17] Liu H, Zhou J, Mo Z L, et al. A Novel Variable Topology Design for a Multi-Flexible Ejection Mechanism[J]. Defence Technology, 2020, 16(2): 432-438.
Study on Metamorphic Ejection Mechanism for Air-to-Air Missile
Liu Hao Shen Xin
(1. China Airborne Missile Academy, Luoyang 471009, China;
2. The First Military Representative Office of Air Force Equipment Department in Luoyang, Luoyang 471009, China)
Abstract: The separation attitude of air-to-air missile to fighter should be adjusted adaptively in wide range to meet the missile-aircraft separation requirements under different flight states, but current ejection separation mechanism with fixed separation attitude could not meet the requirements. To solve this problem, a metamorphic ejection separation mechanism is proposed. Metamorphic PR-R kinematic pair is used to replace traditional hinge kinematic pair in the key hinge of ejection separation mechanism, the ejection forces of the front and rear push arm to missile are changed in real time, then missile ejection separation attitude could be adjusted adaptively in wide range. Multi-body dynamics model of metamorphic ejection separation mechanism is established, and the dynamics simulation analysis is carried out. Simulation results shows that the proposed metamorphic ejection separation mechanism could adjust separation attitude in wide range, which lays a foundation for the further realization of real-time intelligent control of the airborne missile ejection mechanism.
Key words: air-to-air missile; metamorphism; launch safety; adaptivity; ejection mechanism; multi-body dynamics; intelligence structure
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
中学生数理化·高一版(2017年3期)2017-07-08
流体机械(2017年9期)2017-02-06
中学生数理化·高三版(2016年2期)2016-09-10
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
中国卫生(2014年5期)2014-11-10
中国新技术新产品(2014年21期)2014-03-28
中国设备工程(2014年2期)2014-02-28
机械与电子(2014年2期)2014-02-28