
面向任务需求的模块化无人机配置方法
2023-06-28 09:12肖和业杨建峰白俊强张旭东吴利荣
航空学报 2023年7期
肖和业,杨建峰,白俊强,*,张旭东,吴利荣
1.西北工业大学 无人系统技术研究院,西安 710072
2.中国人民解放军 95889部队,酒泉 735018
3.中国人民解放军 96236部队,北京 100085
无人机集群具有数量规模大、体系弹性抗打击、运用场景丰富、任务用途可配置等特点,是左右未来战场胜负的关键手段[1-2]。而无人机集群在多种运用场景下多样化的任务用途需求,增加了无人机大规模制造的复杂度,使其无法有效地控制成本,制约了无人机大规模集群运用[3]。因此,面向多任务用途需求及成本约束下,如何实现无人机大规模的集群运用,就成为了一项亟需研究的课题。
无人机属于工业产品之中的一类,其面向多任务用途的大规模制造及运用问题从本质上来看,是如何实现产品大规模定制化设计、制造及配置的问题。关于这一问题的研究在近十年来备受关注[4-6],许多学者在解决该问题上也提出了很多有效的方法及理论[7-10]。例如,李浩等[8]提出了面向大规模个性化的产品服务系模块化设计框架,通过物理与服务的内部模块组合,实现客户需求的大规模、个性化、低成本及快速配置。张英英等[9]提出一种主从关联优化方法,以解决产品族配置与升级的再制造设计问题。杜纲等[10]建立了模块化设计产品平台配置协同优化的主从关联优化双层规划模型。该模型能够比较准确地描述现实生产中模块化产品设计与平台配置之间的关联关系,实现了在产品设计生产中的成本控制。虽然以上研究中采用的方法、理论有所不同,但依然可以发现其共性特点,即通过模块化产品设计和配置实现产品大规模定制化制造及运用的成本控制。依此类推,通过模块化产品设计及配置方法能够解决无人机集群多种任务用途需求与大规模运用成本相互制约问题。
模块化产品设计方法已在无人机中得到运用,且各种概念模块化无人机层出不穷[11-13],并提出了一系列的设计理论及方法。而模块化无人机配置方法作为无人机大规模个性化制造及运用中的关键环节,尚无成熟的理论及研究。因此,为了构建模块化无人机设计[14-16]到产品配置的闭环理论方法体系,需要开展模块化无人机配置方法研究,进而为无人机大规模制造及集群运用提供有效的理论基础。
产品配置方法已有很多学者开展了相关研究,从原有实现单一产品性能方案与客户需求匹配[17-18]、发展到解决多个产品族与客户多样化需求相匹配的问题[9-11]。不仅如此,为了提升产品配置的经济性、时效性,配置方法中还将产品的利润效益、成本、周期等因素作为约束引入到优化配置中,并通过加权算法[19]、粒子群算法[17,20]、遗传算法[9-10,20]来实现产品配置及方案优化。
基于以上研究基础,本文面向集群无人机多用途的作战需求,在模块化无人机配置方法中创建从用途到需求的映射层,以构建用途、需求、性能到备选元素属性的多层映射网络;针对无人机集群在激烈对抗中易发生损耗、使用次数有限的特点,在配置方法中将成本作为约束条件,结合各模块备选元素成本调研数据,开展配置方案优化,以实现成本控制;基于无人机多种类部件复杂的关联关系,在多层、复杂映射网络中,采用改进粒子群方法在成本约束下搜寻由用途、需求、性能到元素属性的最优映射路径,获得配置最优的方案,实现模块化无人机配置对不同用途下多样化需求的精确响应。以文献公开算例为例,采用本文优化算法、遗传算法进行方案配置并对其结果进行对比,验证本文算法的正确性。由此,提出一种模块化无人机配置方法,与模块化无人机设计方法相匹配,以解决无人机大规模集群运用中多种任务用途需求与成本无法有效匹配的难题。
1 模块化无人机配置核心思想
模块化设计是实现产品大规模定制化模式的有效手段,核心思想是通过构建通用模块与专用模块的快速组合,实现客户多样化需求的大规模、定制化、低成本与快速提供。为了适应多样化任务用途并便于大规模制造,无人机基于此思想已开展了模块化设计的研究[11-12],各种类型的模块化无人机也孕育而生。在现有模块化无人机系统中的模块,可以分为通用模块和专用模块2大类。通用模块是指模块度总体较高的,与其他模块联系紧密,基本上不需要进行选择,且不受使用方需求影响的模块,该类模块具备系统反复使用的基础功能。专用模块是指某一方面或几方面关联度较高,需要根据需求进行适当选择,可以实现系统某一方面或几方面功能的模块,该类模块使得系统能够根据需求,衍生出多样化的能力,是对通用模块的拓展。
基于模块化无人机模块划分方法[21],无人机能够将零件归并、聚合形成多个可组合的模块,并辨识出通用模块和专用模块。而如何对通用模块与专用模块进行匹配、组合以满足多样化任务需求,就成为了一项有待研究的课题,也是模块化无人机从设计到面向任务能力生成的关键环节。为此,本文在模块化设计基础上进行无人机模块配置研究,以通用模块为无人机能力构成的基础,通过挑选和配置能够满足任务需求的专用模块,从而配置出满足多样化任务需求的无人机,如图1所示。

图1 模块化无人机配置策略示意图Fig.1 Basic idea of modular UAV configuration
2 方法介绍
2.1 总体架构及流程
与其他机电类产品不同,无人机包含电子、机械、动力、毁伤等多种功能部件,且组成复杂、零件数量多。在多种任务用途的要求下,无人机总体性能与部件属性的关联关系更为繁杂、多样,这使得无人机的配置变为复杂的非线性寻优过程,提升了无人机配置问题的难度。不仅如此,集群无人机在大规模应用时,成本是整个应用的关键影响因数,需要在成本约束下开展无人机的配置研究。因此,在无人机部件与性能复杂映射关系下,最大程度满足任务性能需求并实现对无人机成本的控制,就成为了无人机配置优化的难点。
针对无人机配置的难点,本文将基于“通用模块+专用模块”的配置思想,构建适合模块化无人机的模块配置方法。首先,对任务需求和模块备选元素进行描述,建立需求集和模块备选元素集,以无人机性能为“桥梁”,构建任务需求与模块备选元素之间的关联关系。然后,以专用模块备选元素的成本为约束条件,建立需求满意度评价模型,采用粒子群算法进行迭代计算,最终获得最优的无人机专用模块配置方案,模块配置流程见图2。

图2 模块化无人机配置流程图Fig.2 Flow chart of modular UAV configuration
2.2 任务需求及专用模块备选元素表征
2.2.1 任务需求的模型化表征
需求是客户对产品外形特征、功能等诸多方面的期望标准,根据以往研究结果,需求类别大致分为描述型、解释型、参数型、二元型、选项型等,由于任务需求问题具有一定的模糊性,同时又要进行一定的量化分析。因此,本文采用半结构化的描述性需求类型,通过建立需求集对无人机的任务需求进行描述。设无人机需求集为
式中:Dr表示第r类需求;R为需求的种类数量,无人机任务需求为其中一类需求,每一类需求中又包含多个具体的需求,即
其中:p为第r类需求的数量,dri为需求因子,表示第r类需求中的第i个需求,无人机的需求集描述见图3。因此,需求集D可表示为

图3 任务需求描述示意图Fig.3 Schematic diagram of task requirements description
2.2.2 专用模块备选元素表征
针对无人机总体性能指标需求,在气动布局、总质量确定的情况下,通过总体性能设计模型[22],可以获得各部件的性能要求。基于无人机模块划分方法[21],对各部件进行模块划分及聚类,明确模块与部件的隶属关系,结合现有货架产品的情况,可以获得满足性能要求的部件备选元素集。由于不同的模块包含不同的零部件,且零部件也有不同的备选元素,通过对备选元素的描述,使得零部件的特点更加清晰,进而明确模块的特征属性,达到表征模块属性的目的。本节对专用模块备选元素进行描述,设专用模块备选元素集为
式中:c为模块数;Mi表示第i个模块,其可表示为
其中:mik为第i个模块中的第k个零部件,每个零部件又具备多个备选元素,即
其中:z为备选元素数量;bikq表示第i个模块中的第k个功能部件的第q个备选元素。
模块的构成属性可以用模块内功能部件的备选元素集进行表征,即为模块构成属性的数学形式,具体见图4。以第i个模块为例,其第k个零部件中包含zk个备选元素,用备选元素集进行描述可表示为

图4 专用模块备选元素与模块构成属性映射关系示意图Fig.4 Mapping relationship between dedicated module alternative elements and module composition attributes
2.3 模块配置模型构建
2.3.1 关联关系评判标准
构造关联性矩阵之前,首先需要明确关联关系的评判标准,基于面向客户需求配置方法的研究成果,本文将关联度分为4个等级[20,23-24],具体情况见表1。

表1 关联关系评判标准Table 1 Evaluation criteria of correlation relationship
2.3.2 关联性矩阵的构建规则
1)性能与需求综合关联性矩阵
设无人机任务类需求集为
式中:P为任务类需求的总数,各个需求对应的权重定义为
设无人机包含L个性能,其性能集可表示为
式中:Hl表示无人机的第l项性能,各项性能对应的权重定义为
则无人机性能-需求关联性矩阵可表示为
式中:alm表示第l个无人机性能与第m个需求之间的关联度,考虑需求的权重后,得到无人机性能-需求综合关联行矩阵,可以表示为
式中:λlP为表示第l个无人机性能与全部P个任务需求的综合关联度,其表达式为
2)备选元素与性能综合关联性矩阵
设专用模块的备选元素集为
专用模块备选元素-性能关联性矩阵可表示为
式中:表示第i个模块与无人机性能之间的关联性子矩阵,第i个模块内包含备选元素的数量为Ni,则M(i)M-H可表示为
综合考虑无人机性能权重后,构造专用模块备选元素-性能综合关联性矩阵,其可表示为
式中:δij,l表示第i个模块的第j个备选元素与L个无人机性能的综合关联度,其表达式为
其中:i=1,2,…,n;j=1,2,…,Ni。
3)备选元素与需求关联性矩阵
以无人机性能为“桥梁”,建立专用模块备选元素和任务需求之间的关联关系,即根据矩阵M*H-D和M*M-H可以得到备选元素-需求综合关联性矩阵,其可表示为
式中:ξij表示第i个模块中的第j个备选元素与多用途任务需求集的关联度,表示该备选元素对全部需求的满足程度,其表达式为
4)权重系数获取方法
为确保客观反映各指标间的权重关系,本文引入了专家评分机制,通过邀请无人机设计领域专家,确保结果的准确性。
为此,制定了《无人机模块配置相关权重评议表》,邀请m个专家进行n组权重预估。
式中:rq为第q个专家的权重预估组
其中:rqn为第q个专家对第n项权重系数的评估值。
为降低专家评分的主观因素影响,采用基于专家信度[21]的方法,考虑评分专家的职称、从事专业和从业年限等要素,设置信度评分标准(见表2),确定每个影响因素的权重,综合得到m个专家的评分质量信度值ui(i=1,2,…,m)。

表2 专家评分质量标准Table 2 Quality standards for expert evaluation
然后,计算专家信度系数:
式中:U=[u1,u2,…,um],fi值越大表示专家的权威性越大,其所占权重越大。因此,专家的评价权重可表示为
则q个专家的权重集为
结合专家权重,得到最终的指标权重集为
2.3.3 需求满意度评价模型构建
1)备选元素选择向量
采用二进制数表示专用模块备选元素是否被选中,即“1”表示该备选元素被选中参与无人机专用模块配置,“0”表示未被选中。据此建立专用模块备选元素选择向量
式中:εij=1表示专用模块备选元素mij被选中参与模块配置,εij=0表示未被选中;v表示专用模块备选元素总数。
2)需求满意度评价模型
根据无人机专用模块备选元素-需求关联性矩阵以及选择向量,构造需求满意度评价模型Y=εM*M-D,具体表达式为
采用模块成本作为模型的约束条件,设专用模块的成本向量为
式中:zij表示第i个模块的第j个备选元素的成本,则第t种配置方案对应的成本可表示为
2.4 基于粒子群算法的优化模型求解
面向无人机多种性能需求进行模块化无人机的配置,根本上是一个组合优化问题,同时要满足规定成本的要求,此时优化配置问题可描述为
式中:S为模块化无人机的产品性能与任务需求的适应度,是需求满意度的倒数即1/Y, 其值越小,代表性能与任务需求越贴合;N为功能模块数量;Ni为第i个模块内备选元素数量;εik为模块内元素配置决策量;ξik为备选元素与无人机性能需求的相关度;Zt为无人机配置方案成本;Zp为无人机可承受成本的上限。
由于无人机功能多、组成复杂,其性能关联矩阵较其他产品更为复杂,形成了多层的关系网络,从此复杂的关系网络中搜寻出最优的配置路径,需要采用高效的优化搜寻方法。不仅如此,由于无人机运用还有成本控制的要求,应在优化配置中还要确保方案满足成本的约束。而粒子群算法搜索速度快、效率高,适合于约束满足问题的特点[17,25-26],使得粒子群算法较其他优化方法能够更好地求解本文复杂映射网络下最优关系搜寻的问题。同时,模块化无人机划分方法[21]中也采用了粒子群算法进行模块划分方案的寻优,为了与模块化无人机模块划分方法保持一致,形成模块化设计到配置的闭环体系,模块化无人机配置方法中优化方法选用粒子群算法更为合适。综上所述,本文配置模型采用粒子群方法来实现方案的优化配置。
由于模块化无人机配置是从各模块备选元素进行优化组合的过程,每个模块中每个部件的备选元素不能为空。因此,粒子群初始向量设定时,按每个模块各部件备选元素不能为空的约束进行随机生成;在迭代更新过程中,粒子每个模块各部件备选元素不能为空,如为空则需要对空的模块进行备用元素适应性填充。同时,为了实现在无人机性能与需求复杂关联关系中的高效搜寻,在标准粒子群算法中引入了时变加速因子和时变权重系数[25],以提高粒子群搜索前期的速度和范围,具体公式为
式中:时变加速因子c1、c2变为
其中:c1max、c1min、c2max、c2min分别为加速因子的最大值和最小值;ti为实时迭代次数;T为最大迭代次数。
同时对变惯性权重w进行调整,具体为
式中:ωHmax、ωHmin分别为惯性权重的最大值和最小值,T、ti与式(37)中相同。采用改进后的粒子群算法能够避免陷入局部最优解,并且当收敛到最优解时,对解进行微调,达到提高全局最优解精度的目的,整个优化配置的具体步骤如下:
步骤1初始化参数。随机生成多个选择向量ε(i),i=1,2,…,Nq,Nq为粒子群数量,以此作为粒子群的初始位置,代入式 (29)、式(32)计算粒子群适应度模型,从向量ε中通过排序得到局部最优和全局最优的初始值对应的位置pij(t)和gij(t),并通过式(30)和式(31)计算相应的成本Zt。
步骤2通过式(34)和式(35)更新向量ε,代入式 (29)、式(32)计算粒子群对需求的适应度,通过排序得到局部最优和全局最优的初始值对应的位置pij(t)和gij(t),计算相应的成本Zt。
步骤3如果成本满足约束条件,进一步通过式(34)、式(35)更新向量ε,重复步骤2;如果成本不满足约束条件,重置向量ε,重复步骤2。
步骤4通过以上迭代、形成最优配置方案。获得满意度全局最大的粒子位置向量ε。
整个算法的伪代码如伪代码1所示。
在向量ε挑选出选择向量中“1”对应的备选元素,即为专用模块的配置方案,结合通用模块配置方案,得到模块化无人机配置方案。

伪代码 1 粒子群算法伪代码输入:MM-H; %类模块与产品性能相关度矩阵;MH-D; %客户需求与产品性能的相关度矩阵;WH; %MM-H权值矩阵;WD;%MH-D权值矩阵;Z;%各功能类模块价格向量输出:最佳选择gbest和最佳适应度S;1.C=MM-H·WH+MH-D·WD; %综合权值;2.粒子群初始化;3.For 迭代次数4.For 粒子个数5.新适应度与个体历史最佳适应度做比较;6.个体历史最佳与种群历史最佳适应度做比较;7.End 8.If 模块内未选择任何元素9.随机选择;10.End 11.记录最小适应度S及对应的最佳选择gbest;12.End
2.5 算法验证
为了验证本文算法,以文献[20]的综合适应度矩阵为输入,以适应度为目标函数,价格约束设为Zt<130万元,采用本文算法对文献[20]的产品进行方案配置,粒子群算法中取粒子数N=20,迭代次数T=50,加速因子c1max=c2max=2.5,c1min=c2min=0.5,惯性权重ωHmax=0.9,ωHmin=0.4。同时基于遗传算法[27],在基因编码、交叉和变异环节根据无人机模块备选元素的选择特点调整每段基因的编码及变化策略,在交叉环节设置随机数量的交叉点位对遗传算法进行改进。进而采用此遗传算法对例子进行了分析,整个种群大小设置为20,交叉概率设置为0.3,变异概率设置为0.1。遗传算法、改进粒子群算法经过数次迭代,种群适应度收敛如图5所示。通过优化得到目标函数适应度的最小值为0.027 2,即最大满意度为36.81。需求满意度最大的配置方案为:空心车轴、弹性车轮、三相异步电机、转臂式一系悬挂,该结果与文献[20]中的优化配置方案一致。

图5 最小适应度随迭代次数变化曲线Fig.5 Variation of maximum fitness with number of iterations
为了全面考核本文算法的有效性,采用种群内最小适应度以及整个种群的平均适应值随迭代次数的变化作为参考,对本文算法、遗传算法、文献中的遗传算法进行比较,如图5和图6所示。同时,将上面3种算法的适应度、迭代次数与局部收敛次数进行比较,结果见表3。尽管遗传算法效果也明显优于原文献中的遗传算法,且平均适应度在前几步收敛还略快于改进粒子群算法,但改进粒子群算法的最大适应度收敛速度明显优于其他2种算法。另外,考虑到2种算法在群体规模,初始化等方面的差异,以算法初次达到最优解时适应度函数的计算次数为衡量指标,可以更精准地比较算法的实际计算效率,其结果见表3最后一列。改进粒子群算法的适应度函数实际调用次数为235,遗传算法的调用次数为810。从算法结构看,遗传算法每次迭代对适应度函数的调用次数为初始种群数量的3倍,而改进粒子群算法的模型调用过程仅为完整更新一次粒子的当前适应度,因而节省了计算资源。因此,通过以上计算结果的分析、对比,不仅验证了本文提出配置方法的正确性,还表明本文提出配置方法具有收敛速度快的优势。

表3 3种优化方法结果比较Table 3 Comparison of results of three optimization methods

图6 平均适应度随迭代次数变化曲线Fig.6 Variation of average fitness with number of iterations
3 无人机配置实例
本节针对单兵无人机应用的典型任务场景,以文献[21]中的一次性使用无人机作为研究对象,采用其模块划分结果作为输入,开展模块化无人机配置的实例研究。
3.1 任务场景描述
我方与某国爆发局部冲突的背景下,我方特种部队前出敌方实际控制区域进行渗透作战,行至某河谷地区发现敌情,经过侦查发现敌方规模为连级单位,活动范围约为4 km2,配备步枪,重机枪、单兵防空火箭弹等武器,构筑有临时营地,其附近配备有若干防空火力和岗哨,可能存在隐蔽的火力点。经过综合判断,其可能为敌方前沿指挥所,通过研究制定了无人机、地面人员空地协同作战任务。集群无人机前出进行侦察,获取敌详细分布及火力配置,并作为诱饵诱使敌方暴露隐蔽火力点,通过多波次的侦察与攻击,清除有威胁的火力点,为地面部队开辟安全通道,实现地面部队对其指挥所进行歼灭。其中,无人机的任务主要分为以下2个阶段。
阶段1单兵便携式无人机执行情报搜集任务。基于侦察任务需求,对携带的无人机模块进行适应性配置,构建具备侦察能力的无人机,隐蔽接近任务区域进行地形侦察,搜集人员数量、分布位置、火力配置等信息,并向后方进行实时回传态势。同时,对可疑区域进行循环侦察,并进行试探性攻击,诱使敌方暴露隐蔽火力点,由周围无人机完成隐蔽火力点侦察,完成任务后进行回收,其间无人机被击落后,由地面人员根据侦察任务进展情况视情进行补充。
阶段2单兵便携式无人机执行定点清除任务。基于搜集的任务区域详细情报,生成精准攻击任务需求,配置战斗模块、发射与回收模块的发射方式,组成具备精确制导和攻击能力的无人机,根据已搜集的情报对任务区域多个具有威胁的火力点同时进行定点清除。任务场景示意见图7。

图7 任务场景示意图Fig.7 View of UAV task scenario
3.2 无人机配置模型构建
3.2.1 任务需求获取
依据任务场景中对无人机的使用需求,建立需求集,具体见表4。
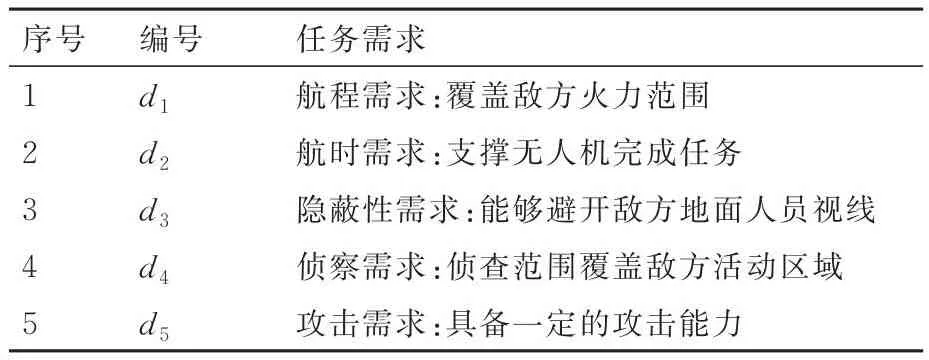
表4 无人机任务需求Table 4 Mission requirements of UAV
根据表4可得到一次性使用无人机的需求集:
3.2.2 无人机性能分析
根据任务需求,对一次性使用无人机的性能要求进行分析,建立性能集,具体情况见表5。

表5 无人机性能要求Table 5 Performance requirements of UAV
则一次性使用无人机的性能集可表示为
3.2.3 专用模块备选元素表征
基于文献[21]中的一次性使用无人机的模块划分结果,通过“通用模块+专用模块”的策略对模块进行配置。由于结构模块具备集成度高、轻量化、成本低等特点,将其划为通用模块之一;飞控模块的控制原理及工程运用方式较为成熟,且在组成上大同小异,可以作为通用模块之一。其余模块可作为专用模块参与配置。
基于市场调研、询价、预估,给出了备选元素对应的成本,具体情况见表6。

表6 一次性使用无人机专用模块备选元素Table 6 Alternative elements of special-use modules for disposable UAVs
3.2.4 无人机需求与备选元素关联性分析
任务场景中阶段1、阶段2的任务需求存在差异,阶段1任务的主要目的是搜集情报,对任务区域的人员分布、火力配置、地形环境等情况进行侦察,对无人机的侦察能力要求较高;阶段2任务则是定点清除任务,对有威胁的火力点进行攻击,要求无人机具备攻击能力。为了完成以上任务,可采用侦察型与攻击型无人机构成的异构无人机集群,也可以采用察/打一体的同构无人机集群,为了研究本文算法对2种集群运用下的无人机配置效果,构建其任务能力需求图,如图8所示。

图8 不同阶段任务需求差异Fig.8 Differences in task requirements at different stages
1)建立无人机性能-需求关联性矩阵
依据一次性使用无人机的性能与任务需求的关联关系,得到一次性使用无人机性能-需求关联性矩阵为
邀请10名无人机设计领域专家进行评分。经计算,然后取两位有效数字,分别确定任务需求的权重wD和无人机性能的权重wH为
2)无人机专用模块备选元素-性能关联性矩阵
根据一次性使用无人机的专用模块备选元素与无人机性能的内在关联,针对2个阶段的任务需求,结合无人机性能模型[22],分析得到专用模块备选元素与无人机性能之间的关联关系。
3)侦察型无人机备选元素与性能关联矩阵
根据阶段1任务需求,需要配置出具备侦察能力较强且可以回收的无人机。因此,该型无人机没有战斗模块,侦察型无人机专用模块备选元素-性能关联性矩阵为
式中:
侦察型无人机专用模块备选元素的成本矩阵为
4) 攻击型无人机备选元素与性能关联矩阵
基于阶段1获得的情报,阶段2的攻击型无人机主要执行攻击任务,搭配经济型的制导设备和战斗模块,对有威胁的火力点进行定点清除,因此,该型无人机无需回收,其专用模块备选元素-性能关联性矩阵为
攻击型无人机专用模块备选元素的成本矩阵为
5)察/打一体型无人机备选元素与性能关联矩阵
采用察/打一体型无人机执行阶段1的侦察任务同时完成阶段2的打击任务,需要配置性能合适的侦察模块以及战斗模块,整个无人机无需回收。因此,其专用模块备选元素-性能关联性矩阵、成本元素矩阵,与攻击型无人机的专用模块备选元素-性能关联性矩阵、成本元素矩阵相同。
3.3 配置结果及讨论
3.3.1 约束条件设定
本文将无人机的成本作为配置的约束条件,设定实现此次任务的无人机的成本为10万元左右,其中,需要配置的专用模块约为7万元。因此,将模块配置的成本约束设置为7万元,具体情况见表7。

表7 无人机成本情况Table 7 Costs of parts of UAV
3.3.2 不同需求下无人机配置结果
1)侦察型无人机配置结果
采用粒子群算法对满意度模型进行仿真计算。首先,进行初始值设置,粒子群规模N=30,最大迭代次数T=100,加速因子c1max=c2max=2.5,c1min=c2min=0.5,惯性权重ωHmax=0.9,ωHmin=0.4,进行方案寻优。为了验证本文算法,同时采用遗传算法进行了方案配置,遗传算法交叉概率设置为0.55,变异概率设置为0.1,2种算法种群适应度随迭代次数的收敛曲线如图9所示,此时适应度为0.002 52,遗传算法与粒子群算法得到配置方案结果相同。从图9可知遗传算法的迭代次数45次要多于粒子群算法29次,由此验证了本文提出配置方法的正确性及其收敛速度快的优势。
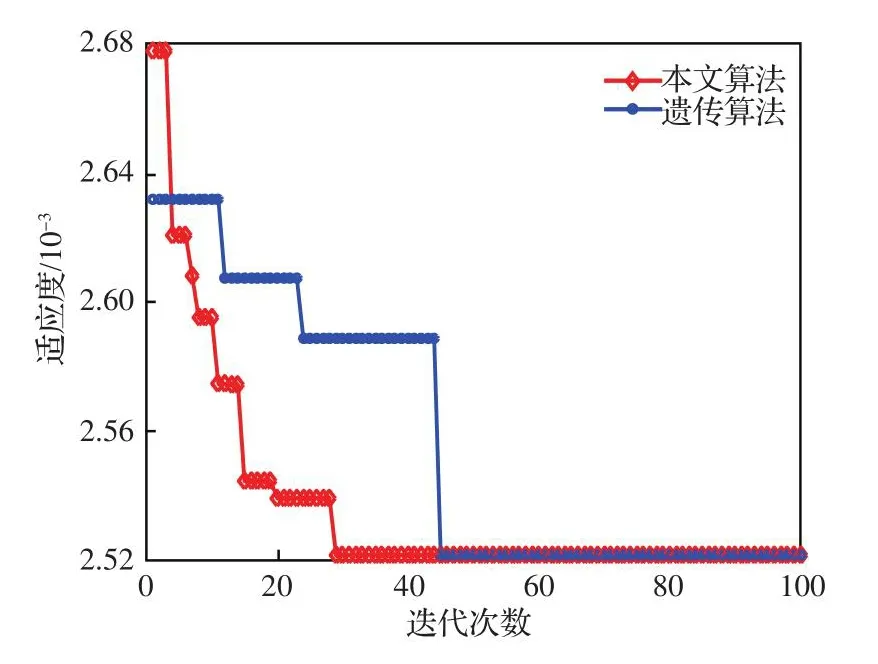
图9 侦察型无人机优化收敛曲线Fig.9 Optimal convergence curves of surveillance UAV
最优满意度值对应的选择向量为
通过最优选择向量挑选出对应的专用模块备选元素,组成侦察型无人机的专用模块配置方案,其成本总和为65 740元,满足成本约束条件,具体情况见表8。

表8 侦察型无人机专用模块配置方案Table 8 Configuration plan of special-use modules for surveillance UAV
2)攻击型无人机配置结果
粒子群初始参数设置与侦察型无人机一致,在25步左右,配置优化过程达到最优解,最优满意度值对应的选择向量为
依据选择向量挑选出对应的备选元素,组成攻击型无人机的配置方案。其中,动力模块选择LY X3120电机、HY电子调速器、铝合金桨夹、碳纤维桨叶;通信与电源模块选择6S锂电池、集成式电源管理板、3 km数据链、数据链共型天线、单光导引头;控制执行模块选择碳纤维平尾、垂尾、GDW DS1906B舵机;发射与回收模块为燃气组件;战斗模块选择电子引信、0.5 kg战斗部,结合表6可以计算的到配置方案对应的成本为47 540元,满足约束条件。
3)察/打一体型无人机配置结果
粒子群初始参数设置与侦察型无人机一致,在30步左右,配置优化达到最优解, 最优满意度值对应的选择向量为
依据选择向量挑选出对应的备选元素,可得察/打一体型无人机的配置方案。其中,动力模块选择LY X3120电机、HY电子调速器、铝合金桨夹、碳纤维桨叶;通信与电源模块选择6S锂电池、集成式电源管理板、5 km数据链、数据链柱状天线、双光导引头;控制执行模块选择碳纤维平尾、垂尾、GDW DS1906B舵机;发射模块为燃气组件;战斗模块选择机械引信、0.5 kg战斗部,结合表6可计算得到无人机对应的成本为69 790元,满足约束条件。
3.3.3 配置结果分析及对比讨论
依据案例任务中侦察、攻击、察/打一体3种需求,本文算法在成本约束下对各模块中的备选元素进行了选取,实现了3种任务需求下模块化无人机模块的高效配置。由于模块化无人机尚无采用成熟配置方法进行模块配置的相关案例,本文通过模块化无人机的配置方案与公开文献[28-29]中现有单兵用无人机的参数配置进行对比验证。通过对比可知:侦察型无人机的参数配置与美国“龙眼”无人机的性能、配置相近;攻击型无人机的参数配置与美国“弹簧刀”性能、配置接近;察/打一体型无人机性能与以色列“hero-30”无人机性能、配置相近,而以上无人机已在案例所述场景中得到了成功的运用。通过以上对比表明:模块化无人机配置方案能够实现对不同任务需求的匹配。不仅如此,模块化无人机的成本还能够满足成本约束。由此可知,本文提出的模块化无人机配置方法能够实现无人机性能、成本与多种任务用途需求的协同匹配。同时,也验证了本文提出算法的合理性。
从无人机模块配置过程中可以发现模块化无人机各模块的元素性能与成本直接相关。因此,模块化无人机配置方案就直接决定了其成本价格。为了进一步揭示本文的模块化无人机配置方法对其单机成本、集群应用成本的影响,本文将从模块化无人机单体成本占比、面向任务运用成本2个层次开展讨论分析。
1)成本占比分析
面向不同任务需求形成的模块化无人机配置方案中,结构模块成本为5 000元,飞控模块成本为25 000元,动力模块4个部件价格为305元、265元、50元、120元,通信与电源模块中锂电池、电源管理模块、数据链、共形天线、导引头价格分别为5 000元、1 500元、20 000元、900元、25 000元,控制执行模块价格为1 400元,发射与回收模块为1 200元。飞控模块、通信与电源模块在整机成本中占比较高,其中飞控、数据链、导引头这3个部件成本之和占单机成本的70%以上。尤其在侦察型无人机中,由于侦察任务对图像获取及数据传输能力的需求更高,数据链、导引头部件成本占整机成本的比例达50%以上,具体如图10所示。虽然察/打一体无人机通过本文算法在要求价格范围内获得满足需求的配置方案,但侦察、攻击需求解耦配置后,侦察型无人机能够通过配置重复回收模块实现多次使用以控制成本,打击型一次性使用无人机可以选配满足要求的低端部件以控制成本。由此可知,通过需求的动态调整,结合模块化无人机配置方法,能够实现对模块化无人机单机成本的控制。

图10 侦察型无人机成本占比图Fig.10 Cost proportion of surveillance UAV
2)无人机任务运用成本
对于案例中的运用场景,可以通过察/打一体无人机一次性完成2个阶段的任务,也可通过侦察型无人机完成第1阶段任务,攻击型无人机完成第2阶段任务并回收侦察型无人机,这2种无人机的任务运用模式会带来成本上的差异。基于现有的模块化配置方案,针对区域内不同攻击目标个数,可以获得模块化无人机任务运用的成本曲线,如图11所示。在攻击目标个数<2个时,采用察/打一体无人机成本比侦察型与攻击型组合的无人机成本低。当攻击目标个数>2个时,采用侦察型与攻击型组合的无人机成本比察/打一体无人机成本低,并且随着目标个数增加即无人机使用数量的增加,侦察型与攻击型组合的无人机成本优势越为明显。因此,基于模块化无人机配置方法,不仅能在成本约束下构建无人机配置方案,还能结合无人机任务运用模式对成本进行调控,进而为无人机大规模集群运用提供成本控制的途径。

图11 目标数量与任务成本曲线Fig.11 Task cost varied with target number
4 结论
面向无人机任务需求,本文基于“通用模块+专用模块”的模块化无人机设计思想。以无人机性能为“桥梁”,建立了任务需求和模块备选元素之间的关联关系,构造了需求满意度评价模型,并结合改进粒子群优化方法实现了无人机配置方案的高效获取。针对已有案例,采用本文算法及遗传算法开展配置优化分析,得到了相同的优化方案结果,验证了本文优化算法的有效性,进而提出了一种面向任务需求的模块化无人机配置方法。以具体任务场景的无人机使用需求为牵引,结合模块化无人机模块划分方法研究成果,采用本文提出的模块配置方法在预定成本约束下构建了侦察、攻击、察/打一体等3型无人机的模块配置方案,并与文献中单兵无人机的参数配置对比,验证了配置方案的合理性。各配置方案成本的计算结果表明:本文提出的模块化无人机配置方法能够实现无人机性能、成本与多种任务用途需求的协同匹配,进而解决了无人机多种任务需求与其性能、成本无法精准匹配的难题。不仅如此,通过不同任务需求下模块化无人机配置方案单体成本占比、面向任务运用成本的对比分析可知:本文提出的模块化无人机配置方法与任务需求相结合使用,能对无人机单机及集群运用成本具有一定的控制作用。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
海洋信息技术与应用(2022年1期)2022-06-05
中学生数理化·八年级物理人教版(2021年10期)2021-11-22
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
中学生数理化·中考版(2021年10期)2021-11-22
现代装饰(2020年5期)2020-05-30
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
家庭影院技术(2017年12期)2017-02-06
中国塑料(2016年11期)2016-04-16
