
高速公路跟车场景的碰撞时间改进方法及应用案例研究
2023-07-25 05:18王孜健李心怡么新鹏
科技与创新 2023年11期
王孜健,李心怡,景 峻,李 鹏,么新鹏
(1.山东高速集团有限公司,山东 济南 250000;2.同济大学道路与交通工程教育部重点实验室,上海 201804)
1 研究背景
道路安全始终是最值得关注的社会问题之一。随着中国交通水平的发展,人均汽车保有量不断提高,交通事故发生的数量整体呈上升趋势[1]。为了降低交通事故发生的概率,加强对交通安全的研究至关重要。
随着智能化交通安全管控的不断发展,交通安全替代分析方法(Surrogate Safety Analysis)在学界中也引发人们的关注。交通安全替代分析方法以其“未遂先兆”、高效快速的特点,与“事后主动”、数据收集周期长的通过历史碰撞数据分析相比,更具优势。安全评价指标的构建,在交通安全替代分析领域中有着广泛的应用价值。
针对车-车冲突,现有主流交通冲突分析技术主要基于恒定速度驾驶。 其中, 碰撞时间(Time-To-Collision,TTC)是跟车冲突研究领域中广泛应用的指标,其计算公式如下所示:
式(1)中:tTTC(t)为t时刻两车碰撞时间,s;Xlead(t)为t时刻前车纵向位置,m;Xfollow(t)为t时刻后车纵向位置,m;llead为前车的车身长度,m;X˙follow(t)为t时刻后车的纵向速度,m/s;为t时刻前车的纵向速度,m/s。
碰撞时间(TTC)由HAYWARD[2]于1971 年首次提出,其假设在车辆与车辆碰撞预测的过程中,以恒定的现有车速和行驶状态到两车相撞所间隔的时间作为判断两车相撞的风险程度。然而,这一假设忽略了车辆在驾驶过程中的速度及行驶状态变化,缺乏了对车辆与车辆交互影响过程中的动态演化机制,因此其不能准确反应车-车交互过程中的实际风险演化特征。
现有针对碰撞时间的改进研究主要基于TTC 的计算结果和统计分布展开,如暴露碰撞时间(Time Exposed TTC,TET)和累积危险碰撞时间(Time Integrated TTC,TIT)[3]。前者的定义为:规定阈值,计算所有车辆TTC 在该时间和区域内低于该阈值的时间之和。但该指标无法表示低于阈值的程度。可能存在TET 相同,但低于阈值程度显著不同的情况。TIT针对TET 的缺点进行改进,计算TTC 在该时间和区域内低于阈值的时间积分。与TTC 相比,TIT 和TET 的优势在于用新指标替代在一个时间段内使用一个路段的所有对象的TTC 值。但这两个指标仅对某时间段内某段道路的整体安全进行评价,不能表示两车间实时安全性。
由于以上方法依然基于恒定速度假设,并未从根本上弥补TTC 未考虑车-车交互影响的缺点,本文拟通过改变轨迹预测的方式对TTC 进行改进,利用全域轨迹数据,提取跟车场景,构建LSTM 轨迹预测模型,计算改进碰撞时间(improved TTC,iTTC)。
2 数据准备
2.1 数据来源
数据来源于同济大学道路交通安全与环境教育部工程研究中心开发的同济道路轨迹数据平台(TJRD TS)[4]。数据集包括山西五盂智慧高速的基于毫米波雷达和激光雷达采集的全域轨迹数据,以0.1 s 为间隔采集。本文所用的数据为2021 年7 月、8 月、9 月于山西五盂智慧高速路段(K347+600—K352+690)采集的车辆轨迹数据集,共计63 397 059 条数据,其中核心数据如表1 所示。

表1 核心数据描述
2.2 数据处理
由于本数据集由毫米波雷达和激光雷达采集,工作时受环境影响大,可能存在数据缺失或假数据,因此应当对该数据集进行处理。通过数据清洗,将缺失率较高的车辆轨迹和行驶轨迹明显不合理的车辆轨迹进行剔除。筛除异常数据后,使用线性插值法补足缺失片段,然后利用卡尔曼滤波去除数据中的噪声。
2.3 跟车场景提取
由于本文的研究对象是跟车场景,因此实际使用的是从数据集中提取的跟车行为片段,目前从该数据集提取了26 007 个车辆跟车事件。跟车事件认定的方式为[5]:①雷达目标的识别号为LV(前车)大于0 且保持不变,以保证FV(后车)的前车是同一个LV;②LV(前车)和FV(后车)之间的纵向距离在7~120 m 区间内,以排除堵车的情况;③LV(前车)和FV(后车)之间的横向距离小于2 m,以确保LV(前车)和FV(后车)位于同一条车道上;④跟车事件的持续时间大于15 s,保证每个跟车事件有足够的数据用于分析。
从整个数据集中抽取出16 905 个跟车事件,每个事件由若干条记录构成,每个记录包含了前后车的运动学状态等信息。
3 行车风险致因模型构建
3.1 模型选择
长短期记忆(Long Short-Term Memory,LSTM)是一种由Hochreiter 和Schmidhuber(1997)提出的在长序列预测中表现较好的神经网络。轨迹预测实际上可视为序列生成任务,因此本文选择使用LSTM 进行轨迹预测,其基本结构如图1 所示。LSTM 神经网络的核心在于通过多门协作的方式,控制信息的流动。

图1 LSTM 基本结构
3.2 模型搭建
3.2.1 改进的LSTM 的轨迹预测模型
实验发现,神经网络的各项参数对预测精度影响较大。本文模型中加入了Embedding 作为LSTM 的输入,同时加入Dropout 层来防止出现过拟合的问题。改进后的轨迹预测模型如图2 所示,该模型选择adam为模型优化器,mse 为损失函数。
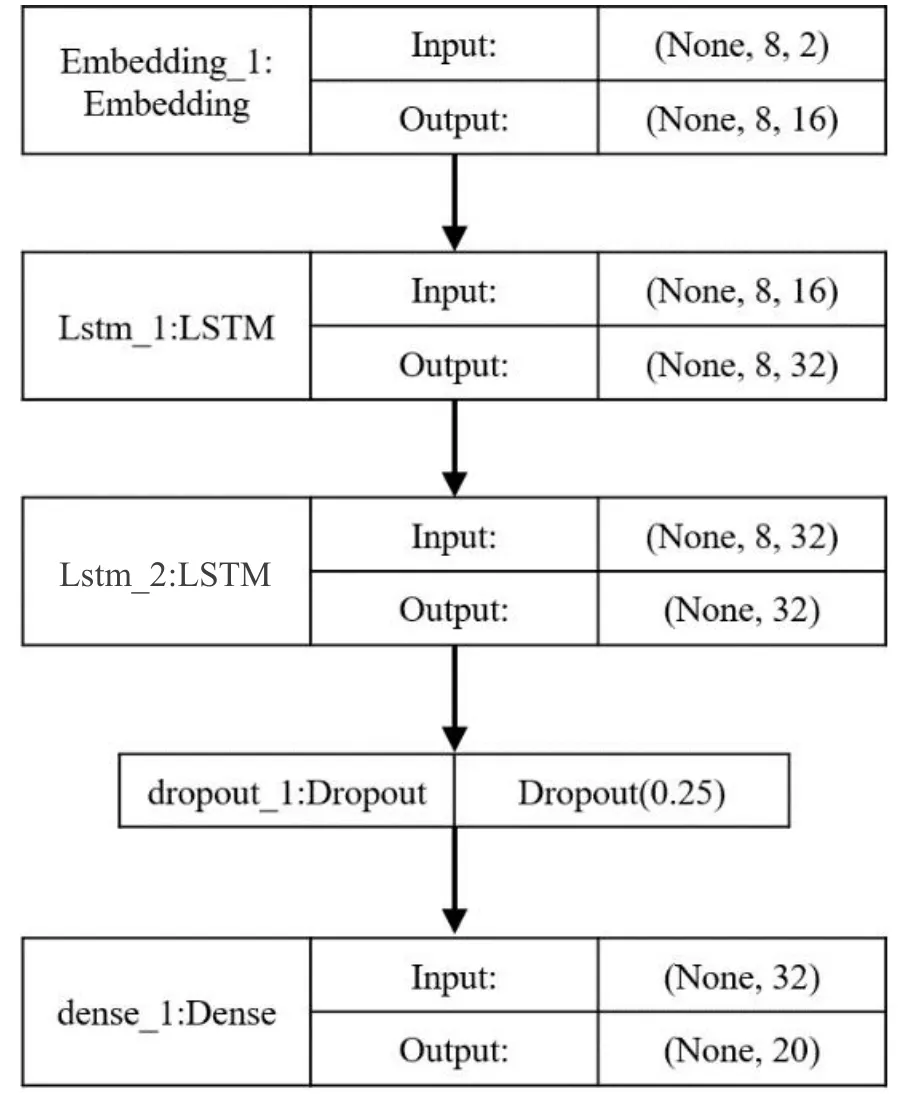
图2 改进的轨迹预测模型
3.2.2 基于轨迹预测的碰撞时间计算
选取处于跟车状态的车辆对,对两车分别利用改进的LSTM 轨迹预测模型进行轨迹预测。若在预测过程中的某一时刻t出现两车中心点距离小于4.6 m 的情况,则将t时刻视为预测轨迹产生碰撞的时间点tpc。通过轨迹预测得到的预测碰撞时间(predicted TTC,pTTC)公式如下所示:
式(2)中:tpTTC为pTTC 的值,s;tpc为预测轨迹产生碰撞的时间点,s;tp0为初始预测时间,s。
重复该流程1 000 次,取5%分位的pTTC 作为当前时刻的iTTC。
4 应用案例
4.1 数据来源
数据也是来源于同济大学道路交通安全与环境教育部工程研究中心开发的同济道路轨迹数据平台(TJRD TS)[4]。数据集包括山西五盂智慧高速的基于毫米波雷达和激光雷达采集的全域轨迹数据,以0.1 s 为间隔采集。本文提取的数据为山西五盂智慧高速路段(K347+600—K352+690)2021 年10 月的车辆轨迹数据集。
4.2 验证轨迹预测结果和分析
经过大量实验,最终选择将轨迹数据的时间间隔处理为0.4 s,用前6.4 s 的轨迹预测后8 s 的轨迹。为了验证改进后的多层LSTM 在轨迹预测方面的作用,本文对不同的LSTM 算法进行测试,并用均方误差对改进算法的有效性进行验证,结果如表2 所示。可以看出,改进后的双层LSTM 模型误差较小,轨迹预测精度提高。

表2 模型改进前后预测效果对比
4.3 改进碰撞时间应用示例
选取一跟车场景,绘制改进碰撞时间iTTC 和碰撞时间TTC 的变化曲线图,如图3 所示。其中,时间戳间隔为0.4 s。若将TTC 小于等于2 s 片段视为危险场景,传统TTC 在第3.1 s 时识别出危险场景,改进后的iTTC 在第2 s 时识别出危险场景,较原TTC 提前1.1 s识别出危险场景。

图3 改进的轨迹预测模型
可以看出,改进碰撞时间与传统碰撞时间相比,或能更及时识别出危险情况。该提前识别危险场景的时间可为驾驶人员提供更多反应时间,从而有利于交通安全,降低事故发生率。
5 结论
本文考虑到TTC 指标恒速假设的局限性,利用基于LSTM 的轨迹预测改进碰撞时间。该指标的优势在于,通过大量数据训练使模型在预测轨迹过程中考虑到运动预测中的不确定性,与事实更加相符。与传统LSTM 模型相比,改进后的LSTM 模型具有更好的轨迹预测效果。根据此模型得到的改进碰撞时间iTTC 可以更加合理推断未来数秒内车辆的行驶轨迹,从而得到更贴合实际情况的碰撞时间。同时,验证结果显示,改进后的iTTC 较传统TTC 或能更及时识别出危险场景,为驾驶人员提供更多的反应时间,从而降低事故发生概率,有利于道路安全发展。
但本文所构建指标仅考虑跟驰场景下的驾驶特征,后续研究可根据更多驾驶场景下的驾驶特征变化进一步探究冲突指标改进方案及其效果。
猜你喜欢
黄河之声(2022年10期)2022-09-27
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
小太阳画报(2018年3期)2018-05-14
中国三峡(2017年2期)2017-06-09
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
阅读与作文(小学低年级版)(2016年12期)2016-12-22
