
高纬度区域GNSS 多系统电离层建模及其精度评估
2023-07-31 10:58肖勇
全球定位系统 2023年3期
肖勇
(杭州杭港地铁五号线有限公司,杭州 311100)
0 引言
电离层延迟是影响全球卫星导航系统(GNSS)导航和定位精度的主要误差源之一,对电离层进行精确建模是提高导航和定位精度的重要手段[1-2].当获取精确的电离层模型后,用户可根据条件利用电离层模型的先验信息进行模型改正或作为虚拟观测值,以进一步提高GNSS 导航和定位性能.
目前,已有不少学者对GNSS 区域电离层建模进行了相关研究.针对中国区域,文献[3]基于GPS 观测数据和球冠谐分析方法建立了中国区域的电离层模型,且对模型精度进行了评估.文献[4]利用GNSS观测数据对中国区域进行了电离层建模,结果表明电离层建模在中低纬度地区性能更优.针对较小区域,文献[5]基于辽宁省鞍山市GPS 地基观测数据,对比分析了不同模型阶数下的电离层模型精度.文献[6]基于球谐函数借助山东区域GPS 双频观测数据,建立了山东区域电离层模型,分析了硬件延迟偏差和电子含量的可靠性和稳定性.文献[7]基于陕西省GNSS地基观测数据和4 阶球谐函数模型,建立了陕西省区域的电离层总电子含量(TEC)模型,结果表明区域电离层建模性能较优.上述研究都是基于中低纬度地区进行电离层建模,而针对较高纬度地区,文献[8]利用欧洲参考站网GPS 观测数据,建立了欧洲区域电离层模型,并对其精度进行了评估.文献[9]利用极地区域多个GPS 跟踪站观测数据,实现了极区电离层建模,并评估了不同电离层模型在极区的适用性.文献[10]基于极地区域GPS 观测数据进行了电离层建模,并以此评估了Klobuchar 和IRI 等不同电离层经验模型在极地区域的适用性.然而,上述针对高纬度地区(如极地区域)的电离层建模研究都只是基于单GPS 系统观测数据.随着GNSS 多系统和MGEX(Multi-GNSS Experiment)测站网的建设,尤其是北斗三号全球卫星导航系统(BDS-3)的全面建成[11],GNSS多系统可增加电离层建模的观测值数量,进而提高空间电离层穿刺点的覆盖范围,对进一步提升高纬度地区电离层建模的精确性具有重要的研究意义.
本文首先给出了GNSS 多系统的电离层建模方法,然后利用高纬度区域的11 个MGEX 测站的观测数据进行了GNSS 多电离层建模,并对比分析了GPS单系统和GNSS 多系统下不同电离层模型的建模精度,以其得到有益的结论.
1 GNSS 电离层建模方法
GNSS 双频伪距的无几何距离(GF)组合观测值可表示为
式中:fk为信号频率;Ne为斜路径s上的电子密度;DSTEC是斜路径上的TEC.将式(2)代入到式(1)中,可进一步推导出和STEC 有关的观测值方程为
在区域电离层建模中,多项式模型和球谐函数模型是较常用的两种模型,能较好地反映TEC 的时空分布变化.其中,多项式模型的VTEC 表达式为[14]
式中:n和m分 别为多项式模型的阶数;Enm为多项式模型系数;β和γ 分别为电离层穿刺点(IPP)的地理纬度和经度;β0和γ0分别为区域几何中心的地理纬度和经度.球谐函数模型的VTEC 表达式为[15]
式中:l和k分别为球谐函数模型的阶数和度数;为勒让德多项式;Akl和Bkl为球谐函数模型系数.以上多项式模型和球谐函数模型的系数均可利用最小二乘估计方法得到,进而实现GNSS 电离层建模.
2 实验结果分析
2.1 实验数据和方案
本文选取2022 年年积日第275 d 高纬度区域(60°N~70°N)内的11 个MGEX 地基测站的观测数据进行GNSS 多系统电离层建模.其中,GNSS 多系统包括GPS(G)、BDS(C)、Galileo(E)和GLONASS(R)系统,实验相应测站的分布图如图1 所示.GNSS 观测数据的采样间隔为30 s,卫星截止高度角为10°,精密轨道采用德国地学研究中心(GFZ)发布的精密产品,DCB 采用中国科学院(CAS)发布的DCB 产品.电离层模型的时间分辨率为1 h,电离层建模的具体解算策略和参数设置如表1 所示.为更好地评估GNSS 多系统电离层建模性能,实验采取两种方案进行对比分析.方案一:采用单GPS 系统观测数据;方案二:采用GPS+BDS+Galileo+GLONASS 四系统观测数据.除卫星系统不同外,两种方案的数据解算策略和参数设置均相同.此外,以欧洲定轨中心(CODE)发布的全球电离层格网(GIM)产品为参考对比分析电离层建模的精度.
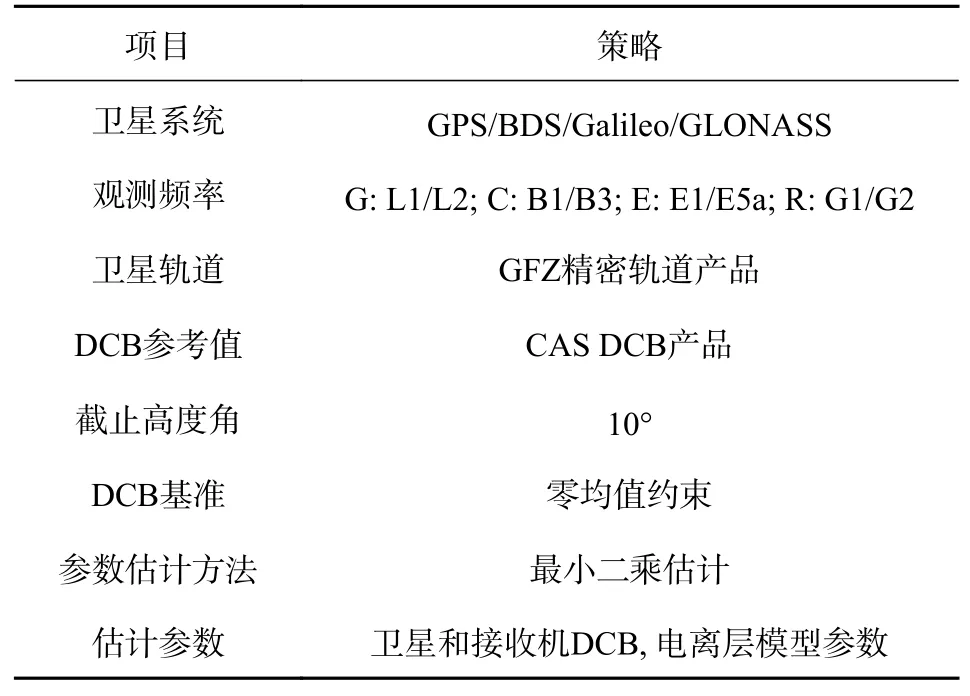
表1 电离层建模解算策略和参数设置

图1 实验测站分布
2.2 DCB 估计结果分析
在电离层建模过程中,卫星和接收机的DCB 可同步估计得到.以CAS 发布的DCB 产品为基准,图2和图3 分别给出了电离层多项式模型和球谐函数模型两种方案下的DCB 估值偏差和CAS DCB 产品偏差.可以发现,方案一和方案二下的GPS 卫星DCB 估值无明显差异.两种不同电离层模型下的各系统卫星DCB 估值差异较小,且绝大部分卫星DCB 估值偏差都小于0.5 ns,精度较高,这是因为以上情况对于卫星DCB 参数估计的模型强度都是足够的.因此,利用高纬度区域GNSS 观测数据进行电离层多项式模型和球谐函数模型建模时,估计得到的卫星DCB 值都具有较高的精度和可靠性.

图2 电离层多项式模型估计的卫星DCB 偏差和CAS DCB 产品偏差

图3 电离层球谐函数模型估计的卫星DCB 偏差和CAS DCB 产品偏差
2.3 电离层建模结果分析
利用GNSS 观测数据进行电离层模型系数解算时,可同时求得最小二乘的后验参数估计精度.限于篇幅,本文只代表性地给出了00:00 T 两种电离层模型建模后的结果.图4 和图5 分别给出了电离层多项式模型和球谐函数模型系数在方案一和方案二下的均方根(RMS).可以发现,方案二由于四个系统同时参与电离层建模,模型解算时的观测值远远多于方案一,因此多项式模型和球谐函数模型系数在多系统下的参数估计精度要高于GPS 单系统,证明了高纬度区域GNSS 多系统电离层建模的优越性.
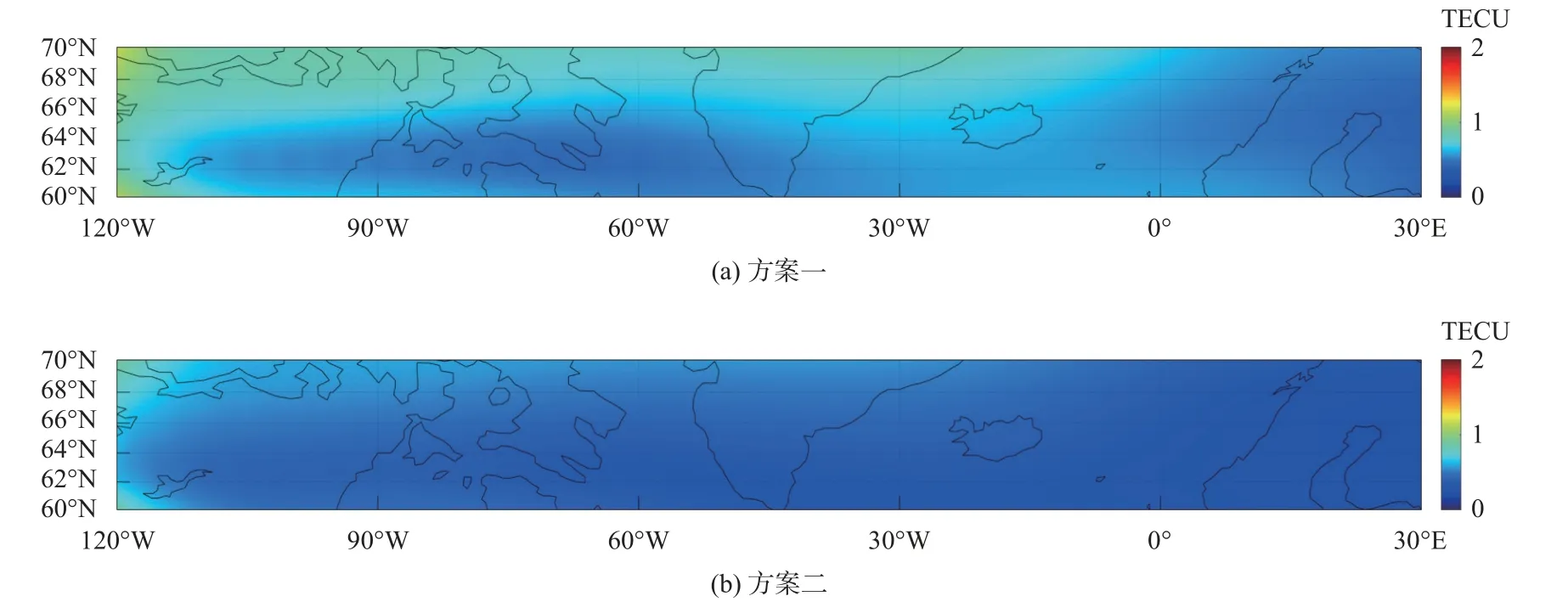
图4 电离层多项式模型系数解算精度

图5 电离层球谐函数模型系数解算精度
以CODE 发布的GIM 产品为基准,图6 和图7分别给出了电离层多项式模型和球谐函数模型在两种方案下的VTEC 残差偏差(用RMS 衡量)分布.可以发现:两种模型在GNSS 多系统电离层建模后的VTEC 残差总体均小于GPS 单系统,表明GNSS多系统电离层建模的精度更高.此外,建模区域的左部边缘和中间区域VTEC 残差较大,这主要和测站在相应区域的分布较少有关.总体而言,GNSS 多系统电离层多项式模型和球谐函数模型在高纬度区域具有较高的建模精度.具体地,表2 给出了两种不同电离层模型和CODE 发布的GIM 产品差值统计结果.可以发现,两种电离层模型在GPS 单系统电离层建模后的精度均优于3.10 TECU;而对于GNSS 多系统,电离层建模后的精度均优于2.10 TECU.具体地,多项式模型GPS 单系统建模精度为2.32 TECU,GNSS 多系统为2.09 TECU,提高率为9.9%.球谐函数模型GPS 单系统建模精度为3.09 TECU,GNSS多系统为1.80 TECU,提高率为41.7%.因此,高纬度区域GNSS 多系统电离层建模优于GPS 单系统,这是因为相对于GPS 单系统而言,多系统可提供更多的观测值用于电离层建模.考虑到CODE 发布的电离层产品精度为2~8 TECU,因此,高纬度区域GNSS 多系统电离层建模时,使用多项式模型和球谐函数模型都具有较高的精度,且优于GPS 单系统.

表2 两种不同电离层模型和CODE 发布的GIM 产品差值统计 TECU

图6 电离层多项式模型VTEC 残差分布

图7 电离层球谐函数模型VTEC 残差分布
3 结束语
针对高纬度区域利用GNSS 多系统进行电离层建模的研究,得到以下结论:
1)电离层多项式模型和球谐函数模型下解算的各系统卫星DCB 估值差异较小,且绝大部分卫星DCB 估值偏差都小于0.5 ns,精度较高,表明高纬度区域GNSS 电离层建模估计得到的卫星DCB 值都具有较高的精度和可靠性.
2)电离层多项式模型和球谐函数模型系数在GNSS 多系统下的参数估计精度要高于GPS 单系统,两种模型在GNSS 多系统电离层建模后的VTEC 残差总体均小于GPS 单系统,表明GNSS 多系统电离层建模的精度更高.
3)电离层多项式模型GPS 单系统建模精度为2.32 TECU,GNSS 多系统为2.09 TECU,提高率为9.9%.球谐函数模型GPS 单系统建模精度为3.09 TECU,GNSS 多系统为1.80 TECU,提高率为41.7%.高纬度区域GNSS 多系统电离层建模时,使用多项式模型和球谐函数模型都具有较高的精度,且优于GPS 单系统.
猜你喜欢
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
空间科学学报(2021年2期)2021-07-21
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年2期)2020-04-01
中国化妆品(2017年12期)2017-06-27
测绘科学与工程(2017年1期)2017-05-04
雷达学报(2017年6期)2017-03-26
太空探索(2016年7期)2016-07-10
中国学术期刊文摘(2016年8期)2016-02-13
