
基于离焦图像的晶圆表面缺陷检测*
2023-08-02 06:04何睿清周鑫宇宋佳潼
组合机床与自动化加工技术 2023年7期
何睿清,周鑫宇,张 慧,郝 飞,宋佳潼
(南京工程学院 a.信息与通信工程学院;b.机械工程学院,南京 211167)
0 引言
半导体芯片产业是对信息安全和国民经济极其重要的战略性产业[1]。晶圆是芯片的载体,晶圆的质量决定着芯片产量,所以晶圆缺陷检测是半导体芯片生产中重要的一环[2]。目前,晶圆缺陷检测多采用机器视觉方法[3],该方法通过采集待测物体表面图像,进行图像处理、分析和识别,具有无接触、抽检率高、实时性高等特点。
基于机器视觉的晶圆缺陷检测,在检测过程中,都需对晶圆上每块区域进行自动对焦,然后采用晶圆缺陷检测算法来检测缺陷,检测结果的准确性会影响晶圆质量的评定。FAN等[4]使用二维傅里叶变换来分析含有关键参数的二维图像,来检测晶圆缺陷。LIU等[5]利用光谱减法技术对晶圆缺陷图像检测,解决光照对检测的影响,提高晶圆检测的速度和准确性。SAAD等[6]使用多层阈值分割算法将晶圆缺陷图像自动分割,该方法能准确有效地分割缺陷。在晶圆缺陷检测方面,国内研究人员也开展了大量研究,戴敬等[7]采用三重中值滤波算法减少晶圆图像噪声,使用归一化模板匹配来检测晶圆缺陷,对光照有较好的鲁棒性。陈治杉等[8]建立晶圆形状模板,对晶圆图像进行形状匹配,使用阈值分割将缺陷进行标记,能有效提取晶圆缺陷。
上述基于机器视觉的晶圆缺陷检测方法,都是直接对晶圆上每块区域进行自动对焦,获取清晰图像后在进行晶圆缺陷检测。在此期间,没有对晶圆是否包含缺陷进行辨别,而是直接整块晶圆区域都进行对焦检测,从而导致检测效率低。本文提出了一种基于离焦图像的晶圆表面缺陷检测方法,可以在图像离焦的情况下检测晶圆缺陷,只检测缺陷是否存在,不对缺陷类型进行讨论,对晶圆缺陷区域和晶圆无缺陷区域提前区分,进行预判断,辨别晶圆区域是否需要进一步的对焦检测。
1 晶圆表面缺陷检测方法
晶圆表面图像的特征主要有两点,如图1所示。①同轴光照明系统存在装配误差,导致图像亮暗不均匀,非常不利于在离焦状态下的进行缺陷检测,尤其是划痕、灰尘等深色缺陷。②通过显微成像系统放大晶圆表面“凹凸”形貌,表现为图像灰度的多变、突变,背景复杂,进一步增加离焦状态下晶圆表面缺陷检测的难度。

(a) 晶圆表面深色缺陷图像 (b) 晶圆表面灰尘缺陷图像图1 晶圆表面缺陷图例
1.1 晶圆表面缺陷检测流程
针对晶圆表面图像特征,制定晶圆表面缺陷检测工作流程如图2所示。缺陷检测流程:首先使用离散傅里叶变换,将空域晶圆缺陷原图转换为频域图像,在频域中对图像特征进行分析,构造合适的频域滤波器对图像进行滤波,自适应估计图像背景,去除不同光照条件下图像亮暗背景;然后,对背景去除的晶圆图像使用优化的分水岭算法进行图像分割;最后,对分割后得到的图像区域进行联合筛选,筛选出缺陷特征区域,完成晶圆表面缺陷识别。

图2 晶圆表面缺陷检测流程
1.2 基于自适应背景估计的晶圆图像背景去除
在晶圆缺陷检测过程中,由于晶圆图像存在背景亮暗不均匀的图像特性,影响检测效果。因此,首先提取和去除晶圆图像背景,来消除背景光照的不均匀性。同时,在实际检测图像的过程中,由于图像光照条件不同,需实现对于不同光照条件下的晶圆图像都能自适应提取背景。在空间域中提取图像背景较复杂,因此本文在频域空间中对晶圆图像进行分析。
假设晶圆图像f(x,y)的像素大小为M×N,对其进行离散傅里叶变换。经过傅里叶变换得到频域图像F(u,v),如图3所示。
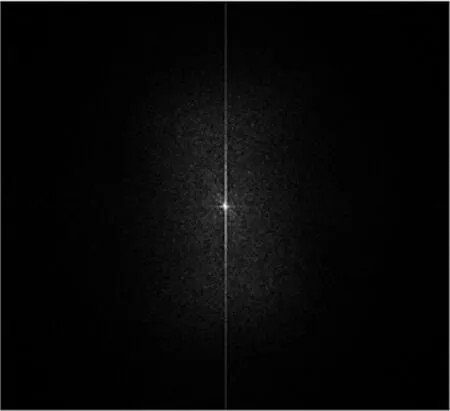
图3 晶圆图像频谱图
频谱图像的能量多集中于低频部分,这也是背景信息存在的频谱区域。显然,如果需要去除不均匀光照的影响,可以通过设计频谱滤波器进行去除。
理想低通滤波器低频与高频之间过渡急峻,会产生振铃现象[9]。采用高斯低通滤波器来减缓振铃现象,该滤波器函数为:
(1)
式中:D0为截止频率,也是滤波器最大的圆域半径,其值为圆域半径上截止频率点(u0,v0)关于频率中心的距离,如式(2)所示。
(2)
截止频率是构造频域滤波器的关键[10]。对于不同光照条件下采集的晶圆图像,需截止频率能自适应光照条件[11],截止频率自适应流程为:
步骤1:根据式(3)计算图像总能量PT,式中的P(u,v)为频域图像的能量模;
(3)
步骤2:滤波器截止频率的不同,对频域图像保留能量也是不同的。在同一张图像中,构建由不同截止频率组成的滤波器,计算每个滤波器截止频率保留能量。由式(4)得到不同截止频率的保留能量与总能量的占比β;
(4)
步骤3:对100张随机样本晶圆图计算,得到其不同截止频率与相应能量占比组成的散点图,用最小二乘法进行曲线拟合,得到截止频率D0与能量占比β的关系式为:
β=-6.748*D0-1.116+99.11
(5)
由上式所得拟合曲线图,如图4所示。该曲线是采用本文晶圆样本生成,对于不同类型的晶圆样本其拟合曲线不一样,需在实际应用中进行标定。

图4 截止频率与能量占比关系图 图5 截止频率与能量占比二阶导数图
步骤4:为了在不同的光照环境下,获取性能稳定的截止频率,对图4曲线求二阶导数获取拐点,二阶导数曲线如图5所示。分析导数图像可知其曲线恒小于零点,在截止频率为D0=10时,曲线开始无限逼近零点,本文取此时为拐点(如图5中叉型标记所示),对应的β为98.6%;
步骤5:对于不同光照条件下的晶圆图像,其图像总能量不同,所需滤波器截止频率也不相同。由多样本拟合曲线得到拐点值,适用于本文实验样本,根据拐点值可构造适合光照条件的频域滤波器。
对晶圆频域图像使用上述构造的滤波器进行频域滤波,使用傅里叶反变换,得到其在空间域的图像,为晶圆背景图像,如图6b所示。晶圆原始缺陷图像与其背景图像相减,得到背景去除的晶圆图像,如图6c所示。

(a) 晶圆缺陷图 (b) 晶圆背景图 (c) 背景去除图像图6 晶圆图像背景去除过程图
1.3 晶圆表面缺陷识别算法
1.3.1 基于优化分水岭算法的晶圆图像分割
本文采用分水岭算法进行图像分割,把整块图像分割成若干块互不相交的区域[12],为图像进行区域分析提供可能。
传统分水岭算法[13]在分割晶圆图像时,对图像中的噪声、晶圆表面细微的灰度变化都有良好响应,会对图像产生过分割现象,如图7b所示。本文对传统分水岭算法进行优化,为解决过分割问题,选用中值滤波作为图像预处理方法对晶圆图像去噪,平滑图像背景形貌,避免细节模糊。经过中值滤波后,分割图像如图7c所示,在一定程度上缓解了过分割现象,但缺陷周围干扰区域过多,不利于缺陷识别,可以使用区域合并的方法来解决。

(a) 背景去除晶圆图像 (b) 传统分水岭分割

(c) 中值滤波后预分割 (d) 区域合并图7 晶圆图像分割效果对比
在通过中值滤波后进行分水岭分割得到图像的预分割结果,对该结果进行区域合并。区域合并的关键在于合并准则和合并终止条件的确定。由于晶圆图像中缺陷与背景存在灰度差异,本文选用分水岭线与其邻域的灰度差值大小作为合并的相似性准则进行区域合并。通过设定阈值的方式来作为区域合并的终止条件。区域合并流程如下:
步骤1:在光照亮度适中条件下,选择分水岭线上灰度值最小点为候选点Pi,分水岭线分割两侧相邻区域为Ri和Rj,计算Pi点与两侧区域中最小灰度值的差值为W;
步骤2:计算Pi点与其两侧区域的差值的最大值Wmax。当满足Wmax 步骤3:进入下一候选点Pi+1,重复上述步骤,直到遍历一遍所有区域,完成区域合并; 步骤4:对于不同光照条件下的晶圆图像,其合并准则一致, 计算该光照条件下图像分水岭线上候选点Pi与其两侧区域的差值的最大值为Wmax。不同光照条件下,晶圆图像区域差值的最大值Wmax会发生变化,导致区域合并终止条件不唯一,需随着光照条件变化。设阈值Tx=(T+Wmax)/2为区域合并终止条件,T为步骤2中合并阈值,可实现阈值对于不同光照条件的适应。 按照上述区域合并流程,在步骤2中必须设定合并阈值为T,作为光照亮度适中条件下区域合并终止条件,阈值T为经验值。 区域合并后分割效果图如图7d所示。本文采用区域合并的目的不是直接分割出晶圆图像上的缺陷特征,而是采用该方式减少相似度一致的干扰区域,为后续区域筛选减少计算量,能将过分割的缺陷区域合并成完整缺陷目标。 1.3.2 基于联合筛选的缺陷识别方法 优化后的分水岭算法把晶圆图像分割成多块区域,对区域分析,可分为缺陷区域和无缺陷区域两类。要提取缺陷区域,既要对两类区域进行筛选识别,本文采用粗筛选加精筛选的联合筛选方法来进行缺陷识别,具体过程为: 步骤1:对分割后区域求取每块区域的灰度均值,由于缺陷区域灰度均值相近,则选取缺陷区域相近的灰度均值作为粗筛条件。对区域粗筛选,得到与缺陷区域灰度均值相似区域,粗筛选后图像如图8a所示。计算区域灰度均值Mean为: (6) 式中:R代表图像区域,P是区域R中的一个像素,g(p)为区域灰度值。 步骤2:对粗筛选后识别区域分析,存在无缺陷区域未被去除,且缺陷区域无法完全包裹缺陷的问题。对每块单独区域进行分析,含有缺陷区域中缺陷与背景对比明显,易使用阈值分割。针对上述问题,本文采用最大类间方差法[14]进行每块区域的精筛选,对粗筛选后图像中的每块区域进行该区域的局部自适应阈值分割,提取每块区域中的缺陷,以此来进行晶圆图像的缺陷识别,识别后图像如图8b所示。 (a) 粗筛选后晶圆图像 (b) 精筛选后晶圆图像图8 晶圆图像缺陷识别效果 使用上述晶圆表面缺陷识别算法检测晶圆缺陷时,由于晶圆在显微成像下的表面“凹凸”形貌给识别缺陷时带来干扰,如图9所示。 图9 晶圆无缺陷区域图像缺陷识别图 在晶圆无缺陷区域时也会识别出缺陷特征。针对该问题本文采用面积阈值的方法,设置图像最终识别后缺陷区域最大面积为判断准则(面积阈值为130),来防止晶圆背景形貌带来的干扰,以便在识别过程中用于区分晶圆缺陷区域和无缺陷区域。 本实验采用的晶圆检测平台如图10所示。该平台主要由显微成像系统,Z轴电机,光源和X、Y轴运动平台组成。测试平台可对晶圆表面图像进行离对焦控制,采集实验所需离焦晶圆表面图像。 图10 晶圆检测平台示意图 实验主要对系统采集的不同光照条件下离焦晶圆图像进行缺陷检测对比。实验图像都是在相同类型的晶圆上采集。实验过程包括对晶圆缺陷区域和晶圆无缺陷区域图像背景去除、分割和缺陷识别效果对比。最后对晶圆表面缺陷检测准确率进行分析。 针对图像整体光照亮度较低(场景1:图像曝光时间为1800 μs)、图像整体光照亮度适中(场景2:图像曝光时间为3000 μs)、图像整体光照亮度较高(场景3:图像曝光时间为4800 μs)这3种典型场景,分别采用本文检测方法分别对晶圆缺陷区域图像和晶圆无缺陷区域图像进行图像缺陷检测,检测结果如图11和图12所示。 (a) 原图像 (b) 背景去除 (c) 图像分割 (d) 缺陷识别图11 不同场景晶圆缺陷区域图像检测过程 (a) 原图像 (b) 背景去除 (c) 图像分割 (d) 缺陷识别图12 不同场景晶圆缺陷区域图像检测过程 由上述实验图像可以看出,对于3种不同光照场景下的晶圆缺陷区域图像和晶圆无缺陷区域图像,实验验证: (1)对于不同光照场景下的晶圆图像,使用自适应背景估计方法能去除图像光照背景,为后续图像缺陷检测提供基础。 (2)优化后的分水岭算法可以分割出完整晶圆缺陷区域,减少相似干扰区域,适用于不同光照场景,抗干扰性强。 (3)采用联合筛选方法进行区域筛选,效果可靠,在不同光照场景下能有效识别缺陷。 (4)对于晶圆缺陷区域图像和无缺陷区域图像都能进行有效检测,便于区分晶圆缺陷区域图像与无缺区域图像。 为进一步验证本文缺陷检测算法的检测准确率。在每种场景下,对测试晶圆上随机划分10块检测区域,对每块区域随机采集10张晶圆表面离焦图像进行测试,像素为2448×2048,每种场景采集100张晶圆离焦图像,共采集300张。分别检测每种场景下的晶圆表面缺陷,将实际人工检测结果与本文算法检测结果对比,得出晶圆表面缺陷检测准确率,准确率为: (7) 3种场景下缺陷检测准确率如图13~图15所示。 图13 场景1晶圆表面缺陷检测准确率图 图14 场景2晶圆表面缺陷检测准确率图 图15 场景3晶圆表面缺陷检测准确率图 从上述图中可知,在3种场景下,晶圆缺陷检测平均准确率分别为94.2%,96.2%和95.4%。在场景2下,其缺陷检测准确率略高于其他2种场景。统计3种场景下的准确率,得出总缺陷检测准确率为95.3%,表明离焦状态下晶圆缺陷检测准确率符合检测要求,能有效检测出缺陷,即可用于系统自动对焦前进行晶圆区域类别区分。 本文旨在探索通过离焦图像进行晶圆表面缺陷检测,将该方法用在晶圆检测平台中,可在离焦的情况下提前区分晶圆缺陷区域和晶圆无缺陷区域,区分后对晶圆缺陷区域进行自动对焦检测,对晶圆无缺陷区域则不需要对焦检测,以期解决平台检测时需对晶圆中每块区域都进行自动对焦,效率低的问题。实验结果表明,离焦状态下晶圆表面缺陷检测的准确率达到95.3%,本文提出的方法具有可靠性和有效性。由于本文方法只是针对晶圆中晶粒表面区域的离焦检测问题,提出了解决方法。对于晶圆中切割道的离焦检测问题本文未作出解答,后期将在晶圆自动对焦策略研究中对该问题作进一步研究。

2 实验与结果分析






3 结论
猜你喜欢
科学与信息化(2023年1期)2023-01-31
无损检测(2022年6期)2022-07-05
中国机械工程(2022年8期)2022-05-09
环球时报(2021-07-16)2021-07-16
中国机械工程(2021年8期)2021-05-07
重庆理工大学学报(自然科学)(2019年6期)2019-07-16
音乐教育与创作(2019年8期)2019-05-16
浙江大学学报(工学版)(2016年4期)2016-12-22
通信电源技术(2016年5期)2016-03-22
电子工业专用设备(2015年4期)2015-05-26
