
基于概率神经网络的航天结构响应映射预示方法
2023-09-07 08:08周嘉明董龙雷赵建平丁镇军王潇屹
航天器环境工程 2023年4期
周嘉明,董龙雷*,赵建平,丁镇军,王潇屹
(1.西安交通大学 航天航空学院;2.机械结构强度与振动国家重点实验室:西安 710049;3.北京强度环境研究所,北京 100076;4.火箭军某部,西安 710407)
0 引言
动力学环境预示是飞行器总体设计中的关键环节[1-3]。传统动力学环境预示方法的一般过程是:首先建立结构动力学模型,然后确定结构承受的载荷条件,最终通过数值方法求解得到结构响应。传统预示方法的准确性完全取决于动力学模型和载荷条件的准确性,然而非线性和不确定因素对结构动力学建模技术提出了不小的挑战[4-6],且确定载荷条件的难度往往高于动力学建模。不准确的动力学模型和载荷条件使传统预示方法的精度不高,导致飞行器结构普遍存在“过设计”和“过试验”的问题。
地面试验数据和飞行遥测数据是飞行器动力学环境预示的重要参考依据。目前,我国航天部门已经积累了大量的地面试验数据和飞行遥测数据[2]。相比于传统方法,试验数据驱动的动力学环境预示[7-8]具有重要价值,然而地面试验状态和飞行状态下结构边界的差异性会导致动力学环境的天地不一致,使得地面试验数据的可信度不高。实际上,这种天地不一致问题在航天领域普遍存在,例如,高超声速飞行器X-43A 的风洞试验气动力数据与飞行试验数据之间的偏差较大[9]。而相对于气动力这一静态数据[10-13]来说,动力学环境这一动态时间序列数据的天地转换会更加困难。
针对动力学环境天地转换问题,阎桂荣教授和董龙雷教授提出了一种基于映射关系模型的动力学环境预示方法[14-16],本文将其称为响应映射预示方法。该方法基于以下假设:在地面试验状态和飞行状态下,结构动力学特性的差异主要源于结构边界条件的不同,在载荷等效的前提下天地之间存在确定的响应映射关系,且这一映射关系可以从数据中挖掘获得,从而实现地面试验状态到实际飞行状态的动力学环境预示。然而,结构在不同边界下承受的载荷很难实现严格意义上的相等,这就意味着响应数据映射存在不确定性。此外,随着飞行器服役条件更恶劣、耦合效应更显著,飞行器结构动力学参数的不确定性也逐渐凸显,使地面试验状态和实际飞行状态下结构的传递特性发生一定的变化,即使保证载荷条件严格相等,响应映射关系也必然存在不确定性,这使得现有响应映射预示方法的可信度无法准确评估。
本文考虑飞行器结构响应数据中蕴含的不确定性,提出一种基于概率神经网络(probabilistic neural network, PNN)的映射预示方法,通过引入概率统计思想,将确定性映射预示方法推广到概率映射预示方法。
1 响应映射预示方法的理论基础
1.1 单源载荷下响应映射预示方法的理论基础
本文将无任何外部边界约束下的结构称为基础结构,而基础结构在地面试验状态(边界I)和实际飞行状态(边界II)下的边界条件必然存在差异,因此将基础结构和边界I 组成的系统称为系统I,即地面试验状态;将基础结构和边界II 组成的系统称为系统II,即实际飞行状态。响应映射预示方法的目的是将系统I 的响应经过映射转换得到系统II的响应,从而避免由边界差异导致的响应天地不一致性。
单源载荷激励下,系统I 和系统II 的频域动力学响应可以表示为
显然,在所有的lf个频点上响应xˆ1和xˆ2之间的映射关系可以通过一个映射向量tˆ ∈Rlf表示为
1.2 分布载荷下响应映射预示方法的理论基础
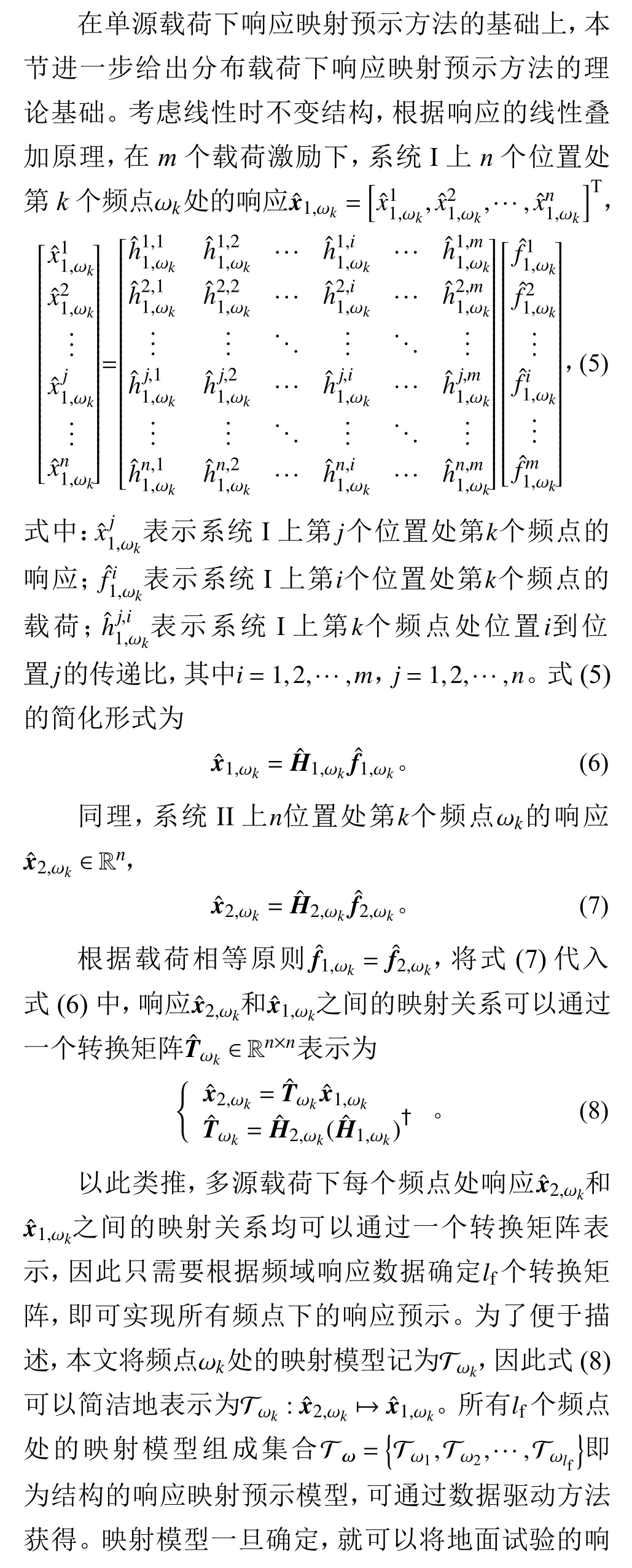

响应映射预示方法中响应测点的数量不受载荷源的限制,这是响应映射预示方法能够在分布载荷场景下发挥作用的关键,也是响应映射预示方法的一大亮点。分析式(8)可知,转换矩阵Tˆωk的维数为n×n,与载荷源数量m无关,这就意味着响应测点数量可以远远小于载荷源的数量,从而确保该方法在分布载荷下的工程实用性。
2 基于概率神经网络的响应映射预示方法
2.1 概率神经网络的必要性
对于线性结构而言,不同边界下响应之间的映射关系可以通过一个矩阵进行描述。对于航天工程结构中蕴含复杂非线性特性的结构而言,不同边界下响应之间也必然存在映射关系,只不过该映射关系不再是一个简单的矩阵,因此矩阵映射法的效果有限。以神经网络为代表的人工智能方法在此问题上具有明显的优势,既适用于线性结构,也适用于非线性结构,通用性良好。
大量工程实践表明结构响应数据中存在的不确定性主要源于以下3 个方面:
1)严格意义上的载荷相等难以实现。受试验设备加载控制误差等不可避免因素的影响,确保结构在不同边界下承受完全相同的载荷条件非常困难,实际工程应用中只能做到载荷近似相等,这种近似过程会对响应映射预示方法的准确性产生影响。
2)结构动力学传递特性的不确定性。由于实际航天工程结构非常复杂,在响应预示频段较宽的情况下,结构的动力学传递特性会存在很大的不确定性,这就意味着即使在载荷相等的条件下,响应之间的关系也无法通过一个确定的映射关系来描述。
3)传感器测量噪声。结构响应的测量数据中一定含有传感器的电噪声,噪声水平会随不同状态下测量设备、传感器型号等硬件的差异而波动。
综上所述,结构响应数据中含有的大量不确定性是无法避免的,而确定性神经网络映射模型无法描述数据中的不确定性。为了能够更好地度量数据中的不确定性,本文采用概率神经网络来建立响应映射预示模型。
2.2 概率神经网络算法
本文采用概率神经网络Tωk|θωk来表示映射模型Tωk,概率神经网络如图1 所示。
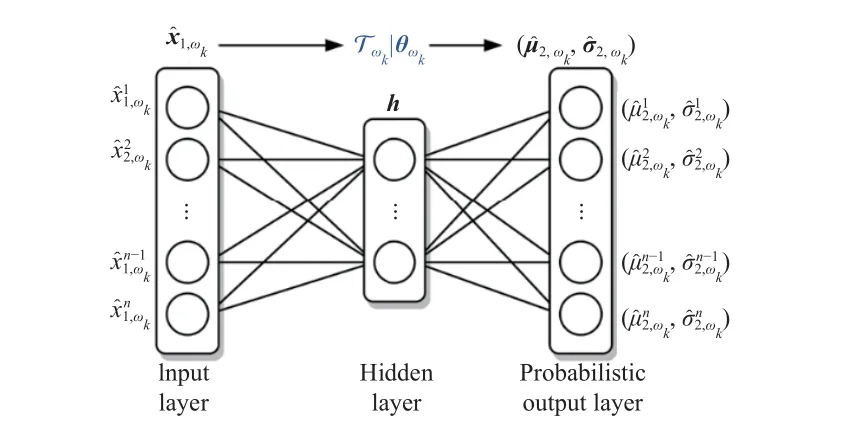
图1 概率神经网络映射预示模型示意Fig.1 Schematic diagram of PNN mapping prediction model
3 噪声载荷下仪器舱响应预示试验研究
3.1 仪器舱混响室噪声试验
在混响室中对两种边界条件下的仪器舱结构开展系统级噪声试验。用弹性绳将仪器舱悬挂在混响室中心位置,两种边界的差异在于有/无端盖,本文将无端盖状态下(边界I)的仪器舱假定为地面试验状态,即系统I;将有端盖状态下(边界II)的仪器舱假定为实际飞行状态,即系统II。有/无端盖对仪器舱结构动力学特性的影响体现在质量效应和刚度效应两方面。整个仪器舱完全暴露在噪声环境中,为了形成封闭的空腔,将无端盖状态下仪器舱的顶部用橡胶垫密封(橡胶垫的质量和刚度相对于金属端盖可以忽略不计),以避免噪声直接作用在仪器舱内部,与有端盖状态下的噪声作用位置尽可能保证一致。
噪声试验条件为梯形载荷谱,试验频率为50~10 000 Hz。本文考虑140 dB 和150 dB 两种总声压级,采用多点平均和1/3 倍频程控制技术进行声压级控制。如图2 所示,在仪器舱周边布置8 个声传感器(编号#1~#8,间隔45°均匀分布)来获取仪器舱外表面的声压数据。在仪器舱外表面周向均匀划分24 条母线(编号从A 到X),从最小直径到最大直径方向均匀划分6 条环线(编号1~6)。仪器舱结构外表面布置32 个加速度传感器,用来测量结构在噪声激励下的振动响应,每个测点的编号规则为“母线编号”+“环线编号”。在140 dB 和150 dB总声压级下各进行40 s 试验,记录所有8 个声传感器和32 个加速度传感器的时域数据,采样频率设置为25 600 Hz。
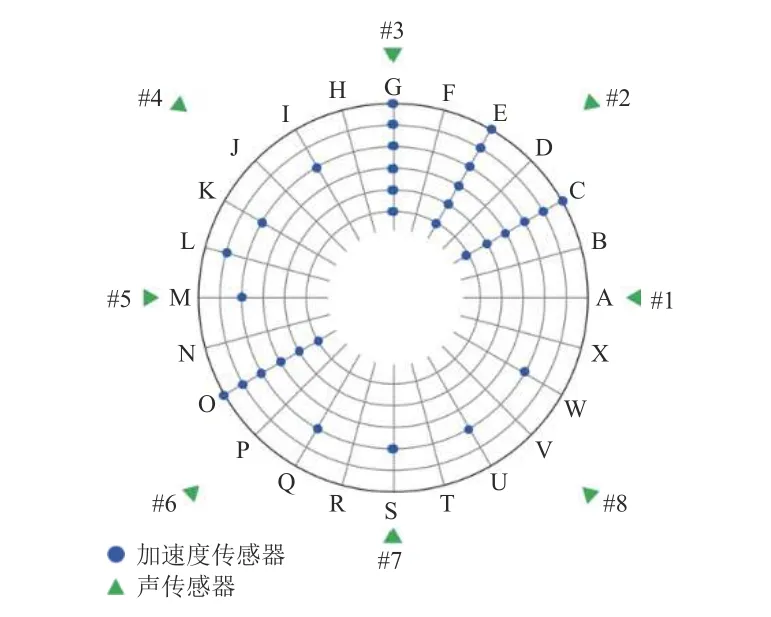
图2 仪器舱噪声试验传感器布置示意Fig.2 Arrangement of sensors for instrument cabin noise test
3.2 时域响应数据预处理
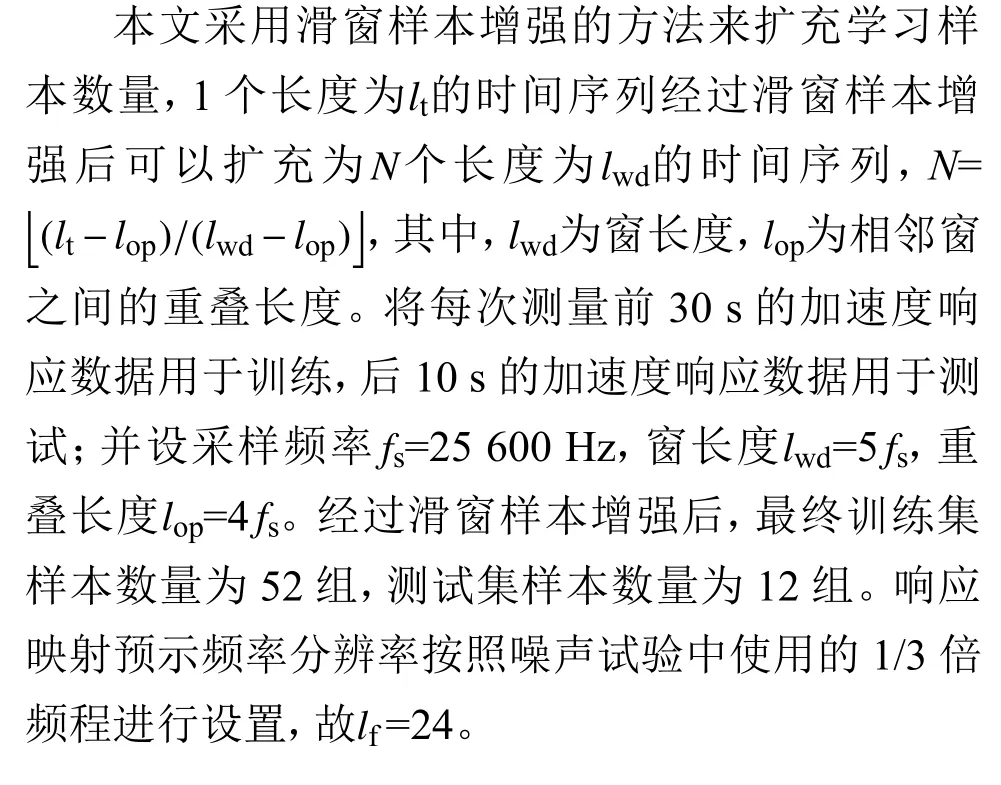
受试验成本的限制,仪器舱混响室噪声试验只开展了2 个声压量级(140 dB 和150 dB)的试验,相当于仅有2 个样本,因此需要采取一定的方法来解决样本数量少的问题。而且,由于试验中采集的一手数据是时域数据,而PNN 方法使用的前提是将时域数据转化为频域数据,因此希望在时频转化的预处理过程中对样本数量进行扩充,本文将这一过程称为样本增强。可以进行样本增强的关键前提是实测的时域噪声载荷呈弱非平稳性。将40 s 的噪声载荷数据均匀分为20 段,每段2 s 时长,计算各段信号的均值和标准差,发现噪声载荷在不同频段处能量均具有一定波动性,最大处标准差达到5 dB。因此,有理由认为不同时间段的噪声载荷存在一定的差异性,故考虑将40 s 的时域数据分割成多段后再进行时频转换,从而增加样本的数量。
3.3 PNN 方法的响应预示结果

比较不同频段中直接法和PNN 方法预示结果的均方误差,如表1 所示:在全频段(45~11 220 Hz)中,直接法在2 个噪声载荷量级下的均方误差分别为261.9%和82.2%,而PNN 方法的分别为1.2%和1.8%,说明PNN 方法可以大幅度提高响应预示的精度,较直接法具有非常明显的优势。直接法的均方误差较大主要表现在其对低频段(45~560 Hz)响应预示精度较差,在125 Hz 频段预示结果偏低达14 dB,在200 Hz 频段预示结果偏高近9 dB。造成这一现象的原因是低频段仪器舱结构模态分布较为稀疏,边界条件的改变对低频模态的影响更大,进而导致响应差异性在低频段更为显著。在中频段(560~3550 Hz)和高频段(3550~11 220 Hz)结构模态变得密集,再加上频段宽度增大,直接法的预示精度有所改善。虽然直接法在整个中高频段基本上可以满足航天工程要求的±3 dB(≈29%)误差指标,但是预示的精细化程度较PNN 方法仍然有非常大的差距。通过上述分析看出边界条件对仪器舱结构动力学特性的影响规律非常复杂,采用直接法无法保证预示结果的准确性,虽然可以利用专家经验对直接法预示结果进行修正,但在面对不同结构和不同边界条件时专家经验不具有普适性。而PNN 方法可以很好地避免这一问题,在不同载荷量级、全频段均具有良好的响应预示精度。考虑到结构加速度响应在不同频段存在量级差异,本文进一步通过绝对误差来比较2 种方法的预示精度,具体结果如表1 所示。可以看出150 dB 噪声载荷量级下,560~3550 Hz 频段内直接法的绝对误差为5.10g2·Hz-1,而PNN 方法仅有0.56g2·Hz-1。总体而言,无论是不同频段还是全频段,PNN 方法的绝对误差较直接法至少降低80%,这再次说明PNN方法具有优异的响应预示精度。
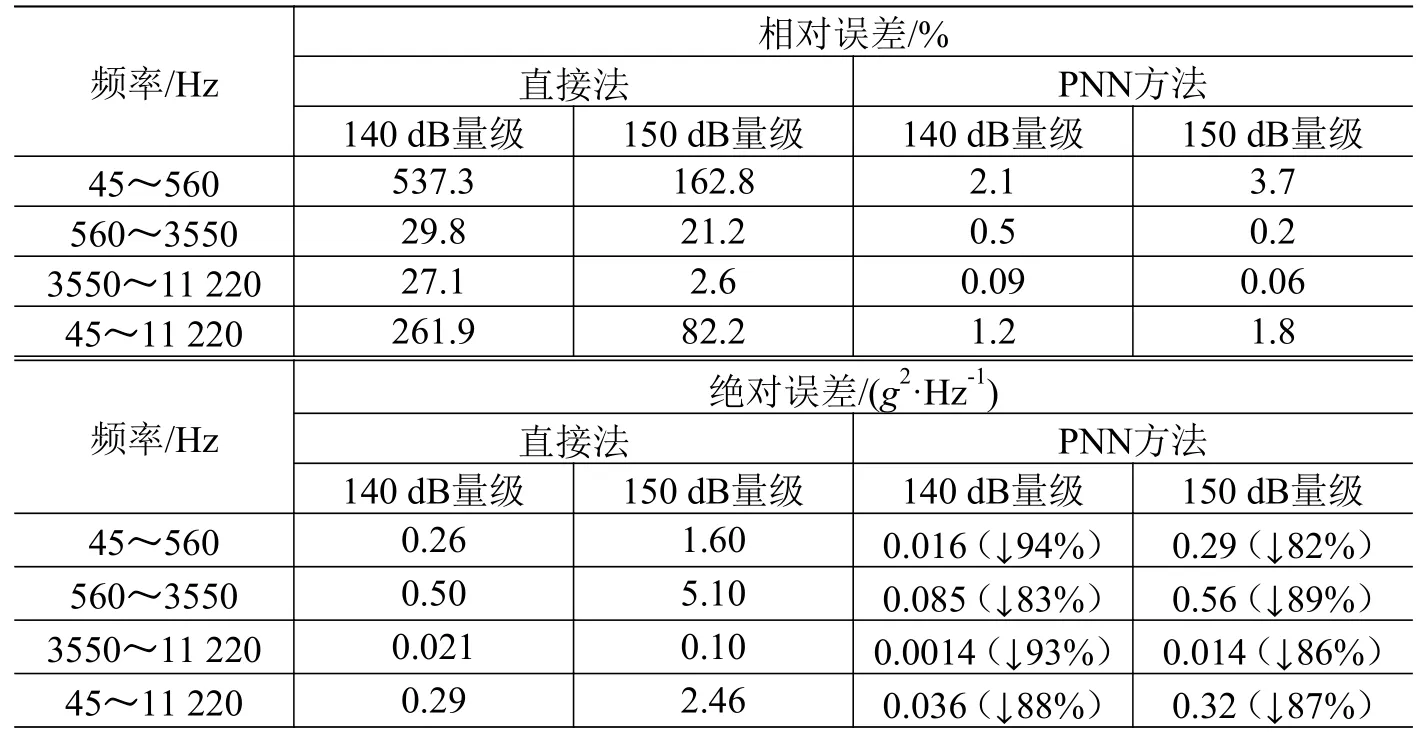
表1 直接法和PNN 方法在不同频段的误差对比Table 1 Error comparison between the direct method and PNN method in different frequency bands
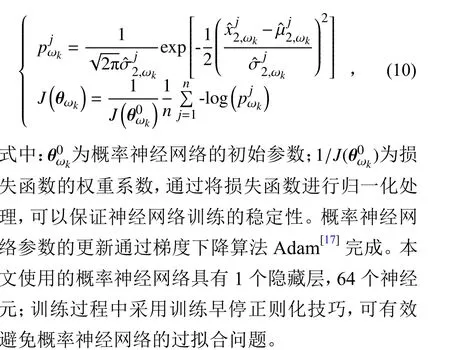
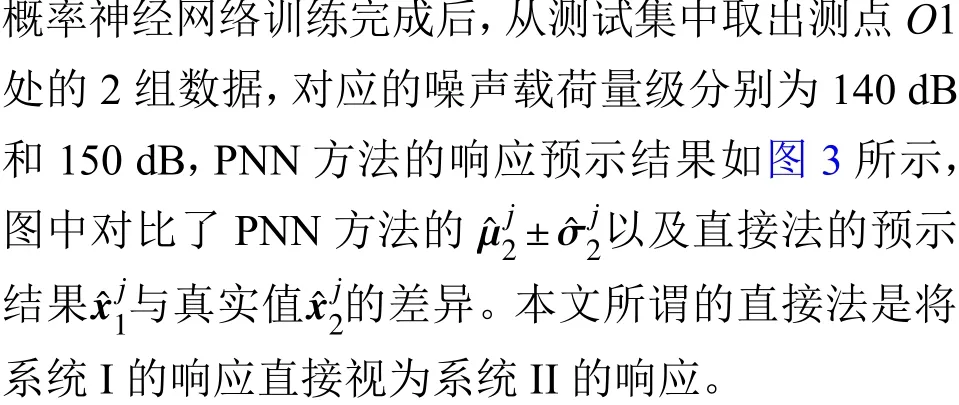
除了优异的响应预示精度,PNN 方法还可以根据给出的标准差来进一步判断预示结果的可信度。通过分析图3 中的标准差数据发现,中心频率50 Hz、63 Hz 和80 Hz 频段处,PNN 方法预示的标准差基本上在1~2 dB 之间,其余频段的标准差不超过0.5 dB。标准差越大意味着预示结果的可信度越低,因此如果采纳标准差较大频段处的预示结果,必须要考虑更大的不确定性,从而确保预示结果能够覆盖真实值。以140 dB 载荷噪声量级下的预示结果为例,考虑95%的置信区间,中心频率80 Hz 频段的预示结果为[-19.6 dB,-11.4 dB],真实值为-16.7 dB;中心频率1250 Hz 频段的预示结果为[25.1 dB,26.3 dB],真实值为26.2 dB。标准差结合置信度给出的预示结果可以更好地覆盖真实值,如果没有标准差的辅助,则无法判断预示结果的不确定性和可信度,这充分展示了PNN 方法良好的可靠性和工程实用性。
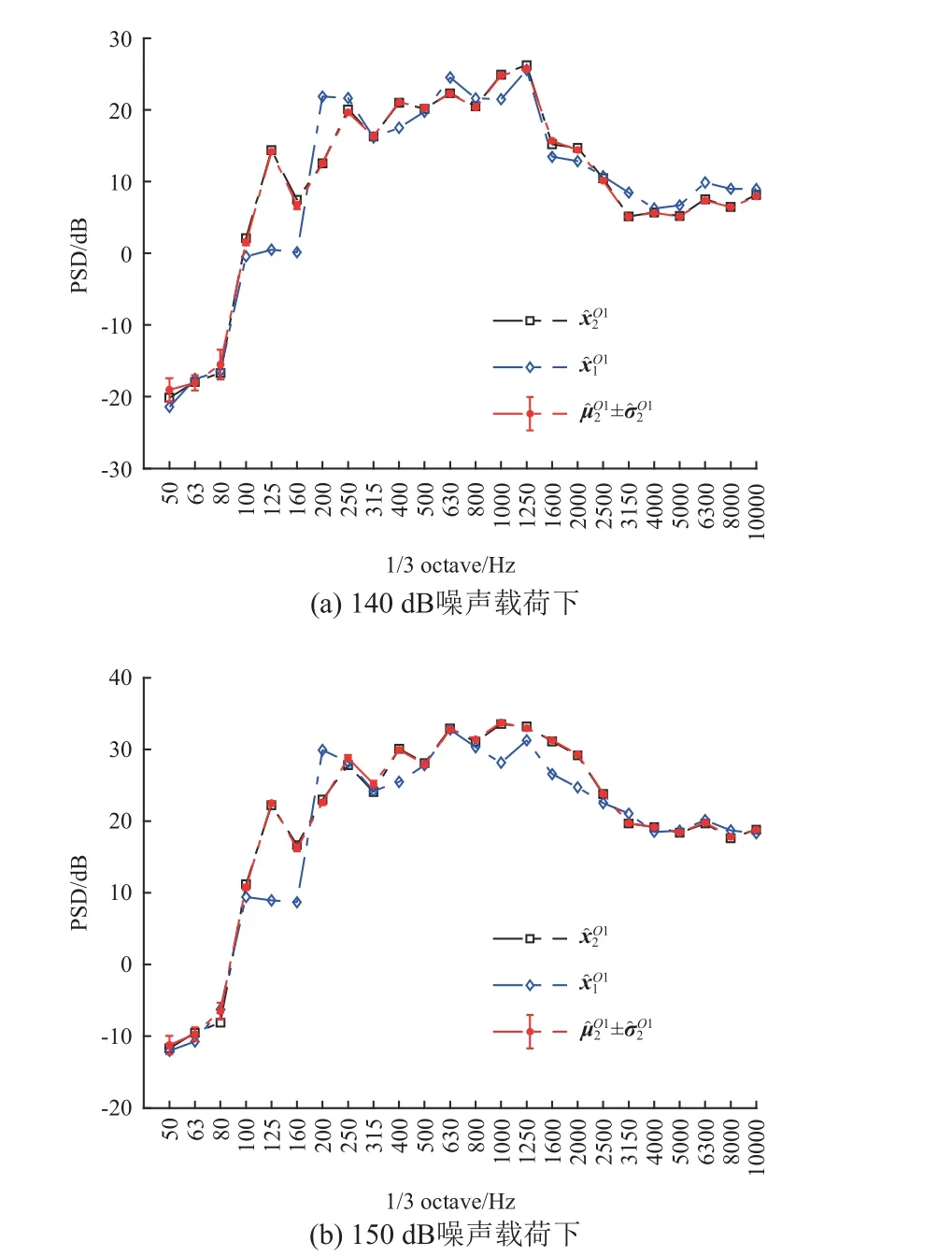
图3 不同噪声载荷量级下PNN 方法响应预示结果Fig.3 Response prediction results by PNN method under different noise load levels
3.4 仪器舱噪声试验数据中的非线性
图4 为仪器舱测点O1 处加速度响应的PSD曲线,可以看出无论是无端盖状态还是有端盖状态,140 dB 与150 dB 噪声激励下频域响应之间没有明显的线性关系,这一现象在中低频段表现尤为明显。考虑到混响室中不同位置处噪声载荷量级控制相对均匀,再加上结构一般具有滤波特性,图4中的这种差异性只能源于仪器舱结构的非线性。以中心频率630 Hz 频段为例,无端盖状态下8 个声测点处不同量级载荷的差异为3.0~3.3 倍,而响应的差异为6.7 倍;有端盖状态下载荷的差异为2.7~3.0 倍,而响应的差异高达11.5 倍。本文还比较和分析了其他31 个测点处的响应数据,结果表明仪器舱结构在很多位置处存在一定程度的非线性,且不同位置处非线性的表现形式不同。此外,本文还利用仪器舱结构的数学模型开展了响应计算分析,结果表明线性结构并不会呈现如此复杂的特性。上述试验结果与计算分析共同表明仪器舱这类复杂的系统级航天工程结构具有一定程度的非线性。
为进一步比较直接法、矩阵映射法和PNN 方法的响应预示精度,计算所有12 个测试样本之32 个测点,共计384 个数据的均方误差、绝对误差的均值和标准差,结果如表2 所示。通过表中的数据可以看出,PNN 方法的预示精度明显优于矩阵映射法,但两者较直接法均具有明显的优势。矩阵映射法的误差大于PNN 方法,这主要是因为响应数据在某些位置、某些频段处存在着一定的非线性,而线性变换无法建立两者的映射关系,使得矩阵映射法预示结果的误差和不稳定性大大增加。因此,当响应数据中存在非线性因素时,本文提出的PNN方法较矩阵映射法更具应用优势。
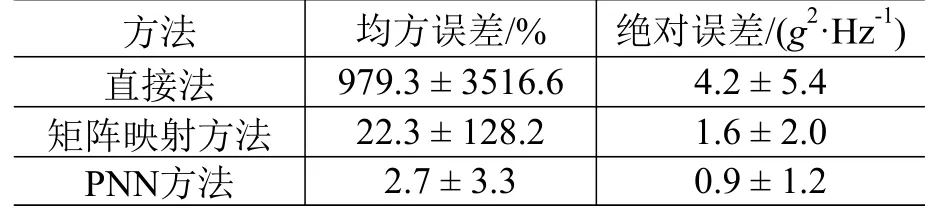
表2 三种方法的响应预示精度对比Table 2 Comparison of response prediction accuracy among three methods
4 结束语
考虑到结构非线性动力学特性和响应数据中蕴含的不确定性,本文提出一种基于概率神经网络的响应映射预示方法,并通过某型飞行器仪器舱混响室噪声试验对所提方法进行了验证。
首先,以线性结构为例,推导分布载荷作用下飞行器结构在不同边界下频域响应之间的内在关系。这一关系也同样适用于非线性结构,为天地响应映射预示方法提供了理论基础;而且映射预示方法中响应测点的选择不受载荷源数量的限制,在分布载荷场景下具有良好的工程实用性。
继而应用本文提出的PNN 方法进行试验验证,针对某飞行器仪器舱的噪声响应预示结果表明,PNN 方法在不同载荷量级、全频段均具有良好的预示精度:在频率范围45~11 220 Hz 内,140 dB和150 dB 噪声激励下,PNN 方法预示结果较直接法预示结果的相对误差可降低1~2 个数量级,绝对误差至少可降低80%;通过分析混响室噪声激励下仪器舱结构的非线性动力学特性发现,PNN 方法较矩阵映射法具有更高的预示精度:在32 个测点处的均方误差可降低1 个数量级,绝对误差可降低50%左右。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年2期)2022-08-11
黑龙江大学自然科学学报(2022年1期)2022-03-29
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
百科探秘·航空航天(2017年12期)2018-01-31
CHIP新电脑(2016年3期)2016-03-10
浙江大学学报(工学版)(2015年2期)2015-05-30
火炸药学报(2014年1期)2014-03-20
计算物理(2014年2期)2014-03-11
