六自由度上肢康复机器人运动学分析及轨迹规划
2023-09-15 09:15马晓君刘训报贾秋生刘德胜袁铭润刘玉阳
机械工程师 2023年9期
马晓君,刘训报,贾秋生,刘德胜,袁铭润,刘玉阳
(1.佳木斯大学 a.机械工程学院;b.信息电子技术学院,黑龙江 佳木斯 154007;2.哈尔滨轴承集团有限公司,哈尔滨 150002)
0 引言
李宇淇等[1]为了探究上肢康复机器人联合康复训练对脑卒中恢复期患者上肢运动功能的影响,在南方医科大学珠江医院对40例脑卒中恢复期患者进行了实验研究,结果表明,上肢康复机器人联合上肢康复训练可以有效改善脑卒中恢复期患者上肢运动功能,促进偏瘫上肢肌肉激活和运动单位募集同步化,提高日常生活能力,值得临床推广应用。
Qian等[2]提出一种基于神经网络的平面上肢康复机器人,其采用导纳控制策略实现主动训练模式,结果表明,患者与健康受试者在交互作用力、运动偏差、运动范围和运动平滑度方面存在显著差异,圆形轨迹跟踪的运动范围和运动平滑度与临床频率测定装置呈正相关。Roy等[3]针对现有上肢康复原型的旋转关节设计了一个2自由度PID控制器,仿真和实验数据表明,所提出的2DOF PID控制器类似于一种适合单自由度肘部运动的控制器。Yan等[4]对人体上肢的解剖结构的了解,设计了一种广义肩关节上肢康复机器人,通过建立上肢康复机器人运动学模型,并进行运动学分析,求出了逆运动学解条件数的标定、可操作性椭球分析及二者的比较配置方案的结果,来对比在正常上肢姿势下人体的运动学性能。
Zhao等[5]提出了新的机器人结构,将柔性绳索与外骨骼结合使用,以确保其与患者上肢相连的运动部件可以达到轻便、准确、灵活的触觉效果。Wang等[6]为了提高上肢外骨骼机器人在康复过程中的人机交互性能训练,对卡尔曼滤波与削波滤波二者相合提出了一种改进方法,并使其达到自适应效果,以减轻采集信号的噪声和延时。所设计的系统有效地遵循了预期的运动意图,证明该方法是对上肢人机交互控制的一个重大改进。Fang等[7]为了分析新型外骨骼的电动机转矩和关节转矩之间的关系,提出了一种将电动机运动映射到关节运动的转换算法。为了验证所提算法是否有效,对其进行了轨迹跟踪仿真,结果证明了所提算法的有效性。Li等[8]采用逆坐标系法求解外骨骼串联等效构型的逆运动学,结果表明所提出的逆运动学算法和轨迹规划方法是有效的。
针对脑卒中患者上肢康复训练问题,本文对设计的六自由度上肢康复机器人进行了运动学仿真及五次多项式轨迹规划,并最终验证了其设计的合理性。
1 上肢结构及运动范围分析
上肢手臂主要由肱骨、桡骨、尺骨、腕骨、掌骨、指骨组成,可以实现上肢的空间运动。

图1 人体上肢骨骼结构图
肩关节是人体比较灵活的一个关节,具有3个自由度,其活动的范围非常大,肩关节活动度的正常范围,主要包括:外展一般情况下为90°,内收为20°~45°,前屈为70°~90°,后伸为30°~40°,内旋为45°~75°,外旋为45°~60°。肩关节的3种运动形式如图2所示。

图2 肩关节的3种运动形式
肘关节位于上肢的中部,肘关节和小臂连接在一起具有2个自由度,由上臂肱骨的髁部和前臂尺骨的近端,以及前臂桡骨的桡骨头共同构成,是一种复关节。肘关节屈曲的范围因人而异,一般可以达到135°~150°,肘关节向后伸的角度相对小一些,一般在10°以内。肘关节和小臂主要运动形式如图3所示。

图3 肘关节和腕关节主要运动形式

图4 上肢康复机器人模型
腕关节主要有2个自由度,腕关节主要是屈曲、伸展和内收、外展运动。
2 康复机器人结构设计
2.1 外骨骼上肢康复机器人模型
通过对人体上肢结构的分析,设计了一款6个自由度的上肢康复机器人,传动件选择伺服电动机,具有质量轻、穿戴方便的优点。上肢康复机器人可以完成肩关节的3个自由度运动,肘关节和小臂的2个自由度运动,腕关节的屈曲、伸展的1个自由度运动,具有康复训练的功能。
上肢康复机器人装置主要由10个部分组成,即康复机器人旋转手柄、转动部件、角接触球轴承S7210、小臂连杆、伺服电动机、大臂连杆、肩部连杆、肩部滑杆、肩部滑轨、背板。上肢康复机器人装置可以实现手臂的空间范围的运动,主要由伺服电动机驱动手臂的运动,旋转手柄可以实现手腕在空间范围的运动,肩宽采用可调节式满足不同患者康复使用。康复训练模式采用被动训练和主动训练这两种模式,被动训练模式是通过伺服电动机带动的被动康复训练,主动训练模式适用于患者主动进行康复训练。
依据中国成年人人体上肢尺寸数据GB/T 10000-88,满足90%中国成年人患者的穿戴需求,上肢康复机器人尺寸设计如表1所示。

表1 上肢康复机器人设计参数
2.2 步进电动机选型及估算
2.2.1 肘关节电动机选型及估算
小臂质量定为0.6 kg,肘关节驱动电动机主要克服小臂做功,考虑到摩擦及传动效率影响,小臂运动到水平位置时,电动机转矩最大,此时转矩为T1=mgD1=0.6×9.8×0.253=1.48764 N·m。因此电动机选择额定转矩为2 N·m的伺服电动机。
2.2.2 肩关节电动机选型估算
大臂质量定为0.7 kg,肩关节电动机主要克服大臂和小臂做功,电动机达到极限位置时的转矩最大,最大转矩为T2=(m1+m2)gD2=(0.6+0.7)×9.8×(0.333+0.188+0.065)=7.46564 N·m。因此电动机选择额定转矩为8 N·m的伺服电动机。
3 上肢康复机器人运动学
从机械的角度看,上肢康复机器人可以用一系列转动关节或移动关节连接的刚体表示。可以通过每一连杆相对于前一连杆的基本运动合成得到上肢康复机器人的运动结果。因此,为了表示空间中的康复训练路径,有必要描述出末端执行器的位置和方向。若要让上肢康复机器人安全、准确地完成规定的康复训练,应该对其进行运动学分析。建立上肢康复机器人D-H坐标系,对末端位置进行求解,如图5所示。图5中:L1=333 mm,L2=188 mm,L3=65 mm。上肢康复机器人运动参数如表2所示。

表2 上肢康复机器人运动参数

图5 上肢康复机器人D-H坐标系
由机器人运动学知识可以得到连杆坐标系间的齐次变换矩阵为
式中,正弦和余弦可以简化为:sin θi=si,cos θi=ci。
由矩阵变换的知识,可以得到上肢康复机器人的Ai变换为:
T6为上肢康复机器人基坐标系和末端坐标系之间的总变换:
计算可得:

4 Adams运动学仿真
肩关节和肘关节的屈伸是康复运动过程中最常做的运动,为了使上肢康复机器人更加真实地模拟人体康复运动的过程,在Adams中对肩关节和肘关节屈伸康复训练进行了运动学仿真。
肩关节外展内收是上肢康复运动的主要形式,肩关节外展设为90°,内收为20°。肘关节运动主要是伸屈运动,伸展设为180°,弯屈为135°。腕关节主要运动是外摆内收,外摆为60°,内收为60°。肩关节、肘关节、腕关节康复运动都是多次往复运动,在Adams中编写驱动函数,让上肢康复机器人规定路线运动。仿真时间设置为20 s,步长为1000,具体驱动函数如下:
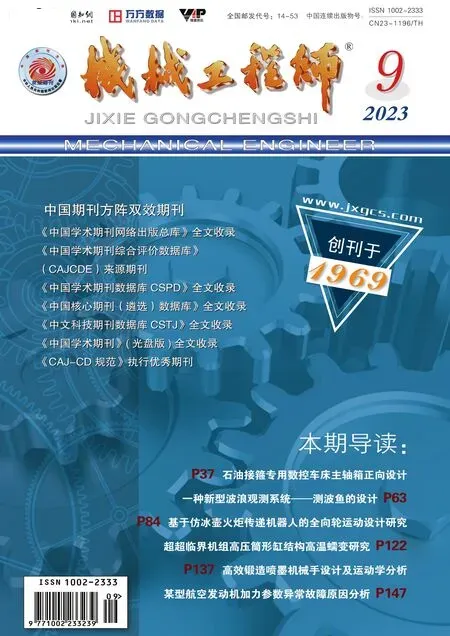
如图6所示,利用腕关节的外摆内收的仿真数据,最终得到了线速度和角速度的曲线图。经分析可知,线速度和角速度都是平稳变化,没有发生突变,可以达到稳定的康复运动效果。
图6 腕关节外摆内收
如图7所示,肘关节线速度和角速度运动曲线表明,在屈伸的过程中,速度呈现出简谐运动,速度增加或减小的过程中没有发生较大的波动,能够完成肘关节的屈伸康复运动。

图7 肘关节屈伸
如图8所示,肩关节的运动外展内收表明,肩关节可以在一定的速度下进行康复运动,运动过程中速度没有发生突变,可以完成肩关节的外展内收动作。
图8 肩关节外展内收
5 基于Matlab的机器人轨迹规划
5.1 六自由度上肢康复机器人模型建立
利用在Matlab中应用机器人工具箱中的link函数和serillink函数建立上肢康复机器人运动模型。使用表2的参数,建立名为“上肢康复机器人”的模型,程序如下:


5.2 空间轨迹规划
空间轨迹规划主要包括关节空间轨迹规划和笛卡儿空间轨迹规划。六自由度上肢康复机器人关节空间轨迹规划和笛卡儿空间轨迹规划如图9所示。

图9 上肢康复机器人空间轨迹规划曲线
关节空间轨迹规划采用五次多项式规划,五次多项式有6个待定系数,可同时对起始点和目标点的角度、角速度和角加速度给出约束条件,设关节角计算公式为:
将相邻的两个插值点看作一小段轨迹的起点和终点,分别用q0和qf表示,约束起始速度为v0,终止速度为vf,计算公式为:

在Matlab中采用五次多项式进行上肢康复机器人关节空间轨迹规划,first_theta=[0 0 0 -pi/2 0 pi/2]初始关节角为上肢康复机器人处于水平伸展位置,final_theta=[pi/2 pi/2 pi/10 -1.25*pi pi 3*pi/4] 最终关节角为肩关节内收、肘关节屈伸、腕关节内收一定角度,采样点数为200个,对规划轨迹进行仿真。五次多项式插值法所得到的轨迹加速度也是平滑曲线,并没有出现突变的情况。在机器人系统中,关节角加速度没有出现突变现象意味着关节电动机不会受到冲击,关节角加速度曲线平滑连续可以保证电动机平稳运行。首末两点的速度和加速度都可以约束为零,由此可知六自由度上肢康复机器人可以平稳地进行康复训练,不会出现安全问题。
6 结论
1)本文对人体上肢的生理结构进行分析,根据其上肢关节的自由度范围设计了一款可穿戴式六自由度上肢外骨骼康复机器人,并对其进行了实体建模,估算出电动机型号。建立了上肢康复机器人D-H坐标系,求出末端轨迹坐标,在Adams中设置step函数,对上肢康复运动进行了仿真,获得了线速度、角速度运动参数,最终确定康复机器人可以完成肩部、肘部、手腕的运动,验证了机器人设计的实用性。
2)通过Matlab中六自由度上肢康复机器人的轨迹规划仿真,位置、速度、加速度曲线平滑连续,可平稳地完成康复训练过程,保证患者康复训练安全性,证明了穿戴式六自由度上肢康复机器人设计的合理性,为上肢康复机器人研究提供了理论基础。
猜你喜欢
中华肩肘外科电子杂志(2020年1期)2020-12-20
河北省科学院学报(2020年1期)2020-05-25
中华肩肘外科电子杂志(2019年4期)2019-01-03
测控技术(2018年6期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
中国自行车(2018年4期)2018-05-26
中国民族医药杂志(2016年7期)2016-05-09
中华肩肘外科电子杂志(2016年3期)2016-01-23
海军航空大学学报(2015年1期)2015-11-11
实用手外科杂志(2015年2期)2015-08-28