高效锻造喷墨机械手设计及运动学分析
2023-09-15 09:15周鹏中
机械工程师 2023年9期
周鹏中
(连云港杰瑞自动化有限公司,江苏 连云港 222006)
0 引言
随着“中国制造2025”战略的不断推行,我国的金属锻造产业正朝向设备智能化、产线自动化迈进。在模锻过程中,为了使锻件更容易从模具中取出并完成脱模,需要将配置好的石墨乳[1]均匀地喷涂到模具上,以达到润滑、降温、保护模具的效果。目前,仍以人工喷墨形式为主,劳动强度大、效率低、安全性不高;部分企业开发的自动喷墨装置多为单点固定式,存在石墨乳喷涂不均匀、覆盖不到位,造成锻件成型质量差、降低模具使用寿命等问题。因此急需一种高效锻造喷墨装置来满足锻造自动化的需求。鉴于此,本文设计了一款高效锻造喷墨机械手,既能满足喷涂的均匀性,又能实现在空间内的多路径运动规划。
1 机械手结构设计
针对在锻造喷涂过程中的具体需求,设计了图1所示的高效锻造喷墨机械手。该装置主要包括直线运动机构、旋转运动机构、摇摆运动机构和升降机构等部分。

图1 高效锻造喷墨机械手整体图
1.1 直线运动机构
直线运动机构[2]如图2所示,是由直线驱动电动机与直线电动机座连接并固定在齿轮箱上,带动直线运动齿轮转动,齿轮与圆齿条相啮合,穿过左右两导向轴套。圆齿条既作为传动机构,又作为导向机构,同时也是末端喷枪的安装支架,减少了零部件数量,使机构的结构更加紧凑。当机械手开始工作时,装置需要到达指定位置,此时直线驱动电动机开始工作,带动直线运动齿轮逆时针转动,此时与齿轮啮合的圆齿条向左移动,与圆齿条固定的左侧的风琴保护罩展开,右侧风琴保护罩折叠,到达锻造的模具工作处,带动末端喷枪做往复直线运动,有效保证模具前后段充分得到石墨乳喷涂。

图2 直线运动机构
1.2 旋转运动机构
旋转运动机构如图3所示,其回转驱动电动机与回转运动齿轮相连并固定在齿轮箱上,齿轮箱连接到回转支承的内圈,升降立柱固定到回转支承外圈上,回转运动齿轮与回转支承齿轮相啮合。当旋转运动机构开始工作时,回转驱动电动机带动回转运动齿轮转动,通过齿轮啮合带动运动齿轮箱绕升降立柱的轴心做圆周运动,使整体的喷墨机械手可实现自由旋转的功能,结合固定在齿轮箱上的直线运动机构,形成两级串联的平面运动机构,扇形工作区域内任一点可达。

图3 旋转运动机构
1.3 摇摆运动机构
本文所设计的摇摆运动机构[3]如图4 所示,机构内的步进电动机穿过双杆夹紧块与偏心轮相连接,嵌入摇摆头内,石墨乳雾化喷枪与摇摆头相固定,圆齿条通过双杆夹紧块和回转轴铜套连接到摇摆头上。当摇摆运动机构开始工作时,步进电动机带动偏心轮转动,偏心轮与摇摆头长条槽内切,以圆齿条作为中心轴线开始做左右往复摇摆运动,此时石墨乳雾化喷枪呈扇形运动轨迹对模具的模腔侧面凹槽进行雾化喷涂,模拟人工作业时的左右摇摆动作,使得喷墨装置对于复杂模腔的兼容性得到进一步的加强,装置的适用性变得更加广泛。

图4 摇摆运动机构
2 运动学建模及分析
为实现锻造过程中石墨乳喷涂的均匀,必须保证石墨乳雾化喷枪在喷墨机械手的驱动下,拟合模腔轮廓形状做匀速运动。锻件可以分为长轴类、圆盘类、枝芽类、弯曲类,其中长轴类和圆盘类均属于回转体锻件,在锻造行业中最为常见,因此本文着重分析回转体锻造过程中喷墨路径的运动学模型。
2.1 简化建模
自动化生产线中,锻件产品轮廓虽会变化,但为保证机器人上下料的稳定,模具中心点绝对一致。因此简化机械手运动模型[4]时(如图5),将平面坐标系原点选在模具中心点O位置。机械手安装定位后,以机械手回转中心点P与模具中心点O连线为坐标系Y轴,其水平垂线为X轴。

图5 机械手运动模型
将机械手简化为一根可伸缩旋转的杆,一端为旋转中心点P,另一端为喷涂点A。对于回转类模具,其喷涂路径一般为绕模具中心的圆形,可简化为坐标系中绕原点O回转、半径为R的圆弧。喷涂点A沿圆弧匀速运动,角速度为ω,机械手的直线运动对应杆长PA伸缩,回转运动对应夹角θ变化。
2.2 运动学方程推导
已知,圆周曲线方程为:
式中:R为回转半径,根据锻造工艺设定;ω为圆周角速度,根据锻造工艺设定;t为时间变量,初值为0。
根据几何原理,可知杆的长度变化方程为
式中:L为杆长,即P、A两点距离;H为常数,即P、O两点距离。
杆的角度变化方程为
对以上两个公式进行求导,即可得到杆直线运动的线速度公式和旋转运动的角速度公式如式(4)、式(5)所示。
直线运动线速度v的计算公式为
旋转动作角速度J的计算公式为
结合两种运动对应的传动系统减速比[5],即可得到驱动电动机的速度控制方程,利用伺服电动机的运动控制器可以准确地驱动直线运动电动机和回转运动电动机按速度曲线动作,喷枪在两种运动的复合下,自动形成圆周运动的合成路径。
另外,对于平面内其他形式的运动,如曲线运动、直线运动等,也可以通过建立其运动学模型,得到电动机控制的输入方程,实现任意路径的合成动作,提高机械手对于不同类型锻件的适应性。
2.3 MATLAB仿真计算
为了更加了解高效锻造喷墨机械手各部件的运动特性,运用MATLAB[6-8]进行数模求解,得出图6所示的两机构运动特性仿真曲线,可知运动学建模准确,直线运动和旋转运动动作平缓,加减速过程近似于正弦曲线,运动冲击小,能够有效保证机械手动作的稳定可靠。
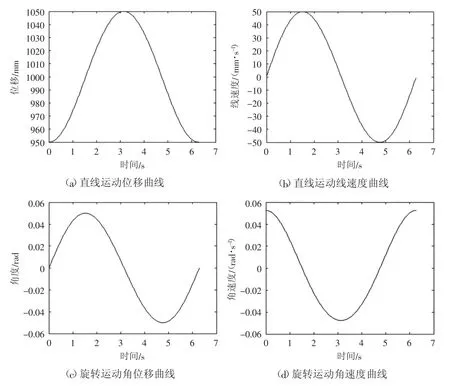
图6 MATLAB运动仿真曲线图
3 结语
针对现有的锻造用石墨乳喷涂装置需求,本文设计了一种高效锻造喷墨机械手,通过理论分析和模拟仿真可以得出以下结论:1)通过直线+旋转的两自由度动作组合,实现了平面内运动曲线的路径合成,动作范围更大,结构更加紧凑,可以实现拟合模腔形状的石墨乳喷涂,覆盖更加均匀。2)旋转运动机构通过偏心轮的往复运动,模拟人工作业时的摇摆动作,提高了对复杂模腔的喷涂兼容性,满足装置在使用过程中不同的需求。3)根据运动路径分解的各机构速度曲线变化平缓、动作顺畅,避免了机构往复运动过程中的冲击,提高了运行的稳定性。
工业自动化是我国不断追求的目标和不断努力的方向,人工喷涂石墨乳工作强度大、效率低,本装置通过多轨迹的组合运动,实现喷涂路径的自由规划,对锻造行业有一定的工程应用价值。
猜你喜欢
一重技术(2021年5期)2022-01-18
能源工程(2021年1期)2021-04-13
幼儿智力世界(2020年2期)2020-10-26
酒·饮料技术装备(2018年1期)2018-04-28
中国有色冶金(2018年1期)2018-02-01
现代工业经济和信息化(2016年4期)2016-05-17
当代化工研究(2016年7期)2016-03-20
大型铸锻件(2015年1期)2016-01-12
大型铸锻件(2015年1期)2016-01-12
大型铸锻件(2015年5期)2015-12-16