绳索驱动机器人的刚度分析
2023-09-18 14:45王熙杰蔡慧林
机械设计与研究 2023年3期
王熙杰, 蔡慧林
(1.湖南铁路科技职业技术学院 铁道机车学院,湖南 株洲 412006, E-mail:wangxijie1929@126.com;2.湖南省高铁运行安全保障工程技术研究中心,湖南 株洲 412006;3.兰州交通大学 电子与信息工程学院,兰州 730070)
机器人刚度不仅影响机器人的动态特性,而且会影响到机器人的定位精度和稳定性,是机器人设计评价的重要指标之一[1-2]。绳索驱动并联机器人的刚度是末端执行器受到外力时,由于传动原件的弹性变形和结构矩阵的变换引起末端执行器空间位置偏移大小的度量。
绳索驱动并联机器人具有结构简单、工作空间大、运动灵活和可重构性能好等优点,使其很好的应用于下肢康复[3-7]、协同吊运[7-8]和高速装配[9]等领域。Behzasipour等[10]分析了绳索驱动并联机器人的刚度,结果显示增加绳索拉力可以提高机器人的稳定性。王克义教授[11]利用有限元方法讨论了不同绳索配置下的绳索驱动盆骨训练机器人的静态刚度。
但绳索只能承受拉力,为了提高机器人的工作性能,王砚麟等[12]在绳索和末端执行器间增加了弹簧,并研究了弹簧长度和刚度系数对其运动力学特性的影响。李帆等[13]在绳索驱动并联机器人中引入了弹簧,利用平均刚度的概念分析了机器人的刚度变化。Gao等[14]利用压缩弹簧和绳索机构仿人脖颈运动。
通过改变弹簧的空间布局和参数(初始长度和刚度系数)可以改善机器人的工作性能。但上述研究未涉及绳索采用弹簧代替后对机器人工作空间和刚度的影响,因此,本研究基于绳索驱动并联机器人的刚度分析了绳索-弹簧混合驱动机器人的刚度分布问题,对该类系统的构型优化和规划具有实际指导意义。
1 绳索驱动机器人静力学建模
建立的m根绳索、n自由度的平面绳索驱动并联机器人的结构简图如图1所示,在过轮b1处建立了全局坐标系O-xy,过轮bi(i=1, 2,…,m)的坐标位置为(xi,yi),末端执行器O2的坐标位置为(x,y),Li(i=1,2,…,m)表示过轮bi和末端执行器O2之间的有效绳索长度。
根据牛顿欧拉方程建立绳索驱动并联机器人的静力学平衡方程为:
JT=B
(1)
式中:T=[t1,t2, …,t4]T为绳索拉力向量,满足条件tmin≤ti≤tmax;tmin表示绳索预紧力以确保绳索始终处于张紧状态;tmax表示绳索的最大允许张力,为了保证系统的安全性能,其主要与电机和绳索材料性能有关。B为系统受到的外力;J为绳索驱动机器人的结构矩阵,即:
J=[J1,J2,…,Jm]T
(2)
式中:Ji表示一个旋量,可表示为
(3)
绳索长度Li可以表示:
(4)
系统受到的外力B可表示为
(5)

在建立的m根绳索l根弹簧、n自由度的绳索-弹簧混合驱动并联机器人(简写为mClS)的力学特性时,需将弹簧视为特殊绳索,即可承受拉力和压力的绳索。由于弹簧只能提供被动力,因此应将静力学平衡方程中结构矩阵要除去弹簧对应的旋量,将其视为外力,此时mClS静力学平衡方程可表示为:
JT=B+Jsts
(6)
式中:Js表示弹簧对末端执行器产生的旋量;ts表示弹簧产生的力。根据胡克定理可知,第i根弹簧产生的力tsi为:
tsi=ksi(Lsi-L0i)
(7)
式中:ksi表示弹簧的劲度系数,L0i和Lsi分别表示弹簧的初始长度和实际长度。
2 绳索驱动机器人刚度分析
在外力作用下,末端执行器抵抗外界干扰的能力是反映机器人刚度的一个指标,对机器人系统的稳定性和有外力干扰时末端执行器的位置精度具有明显的影响,因此,需要计算绳索驱动机器人的刚度。
根据机构刚度定义,由微小外力δF产生的微小位移δP和微小外力δF之间的关键可表示为:
δF=K·δP
(8)
由方程式(1)和(8)可以获得机器人的刚度表达式:
(9)
式中:Kc为机器人的主动刚度;Kf为 机器人的被动刚度。接下来推导机器人的主动刚度和被动刚度。
机器人的主动刚度Kc可表示为:
(10)
式中:H为机器人的Hessian矩阵,结合绳索驱动并联机器人的Hessian矩阵计算方法[15],m根绳索、n自由度的绳索驱动并联机器人Hessian矩阵的第j层矩阵为:
(11)
式中:ui表示第i根绳索的单位向量;ri表示第i根绳索和末端执行器连接点在全局坐标系中的位置。由上可知,绳索驱动并联机器人Hessian矩阵为n×m×n的矩阵。
机器人的被动刚度Kf可表示为:
(11)
式中:ki=Ei·Ai/li0为第i根绳索运动支链的刚度,Ei和Ai分别表示绳索的弹性模量和横截面积。
3 弹簧对绳索驱动机器人刚度的影响
通过绳索驱动机器人的刚度分析可知,其完整刚度为:
K=HT-J·diag(k1,k2…,km)·JT
(12)
由机器人刚度可知,机器人的主动刚度与绳索拉力、绳索的空间位置和末端执行器的位置有关;而机器人的被动刚度与绳索的空间布局、末端执行器的位置和运动支链的参数有关。
在绳索-弹簧混合驱动并联机器人刚度分析时,可在绳索驱动并联机器人刚度模型的基础上直接建立绳索-弹簧混合驱动机器人的刚度模型。在静力学分析时将弹簧作用于末端执行器的力视为方向和大小可变化的外力,此时, 该机构的结构矩阵应该包含绳索和弹簧所对应的部分。该机构的结构矩阵增加了弹簧所对应的列,因此,Hessian矩阵的维数和绳索拉力均会发生变化,由式(10)可知,其主动刚度会发生变化。另外,运动支链的刚度与绳索拉力也有关系,这也会导致被动刚度的变化。
通过上述分析可知,绳索-弹簧混合驱动机器人的静力学平衡方程可表示为:
JT-Jsts=JcsTcs=B
(13)
式中:Jcs=[J,Js],Tcs=[T,ts]T。则由绳索-弹簧混合驱动机器人的静力学平衡方程(13)可以获得其机器人的整体刚度为:
(14)
4 实例分析
本研究将建立竖直平面内2自由度、3根绳索1根弹簧(简写为3C1S)的绳索-弹簧混合驱动机器人模型,假设末端执行器的质量为20 kg,所受外力为0,弹簧初始长度为0.5 m,弹簧刚度系数为123.1 N/m。选取布局方案如图2所示,其中过轮位置b1(0,0)m,b2(0,2)m,b3(2,2)m,b4(2,0)m,选取GB 20118—2006中的圆股钢丝绳为驱动绳索,其直径为1.2×10-3m,弹性模量为2.8×1010Pa,横截面积为1.13×10-6m2,绳索的允许拉力范围为[10, 3 000]N。

▲图2 绳索-弹簧混合驱动机器人的结构简图
机构整体刚度矩阵的对角线矩阵分别表征该机构沿X、Y方向上的移动刚度,因此,研究实例机器人沿X、Y方向上的移动刚度可表示为:
(15)
Kx和Ky的绝对值越大,则沿对应方向上的刚度越大。
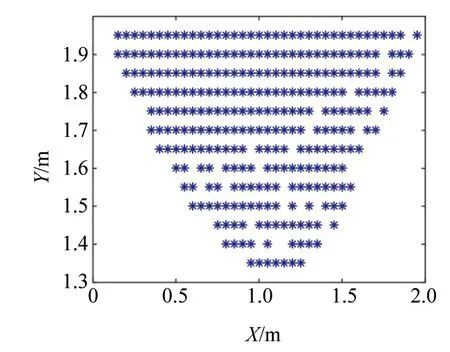
▲图3 C4绳索驱动机器人的工作空间
4根运动支链均采用绳索驱动的绳索驱动机器人(简称为C4,如图1所示的构型)的工作空间如图3所示,C4的有效工作空间呈现关于竖直中线X=1 m的直线对称分布,且主要分布在理论工作空间的中上部。
C4绳索驱动机器人沿X、Y方向上的移动刚度分布如图4所示,计算结果显示,Kx∈[7.549 0, 39.008]×105N/m,Ky∈[3.589 0, 39.009]×105N/m,从整体上来看,C4绳索驱动机器人沿X方向上的移动刚度要大于沿Y方向上的移动刚度,而且从它们的分布图可以看出C4绳索驱动机器人沿X、Y方向上的移动刚度在工作空间的中间区域小,在边界区域较大。

▲图4 C4绳索驱动机器人的刚度分布
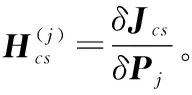
▲图5 C3S1绳索-弹簧混合驱动机器人的工作空间
将C4绳索驱动机器人中的一条运动支链采用弹簧替换变成如图2所示的C3S1绳索-弹簧混合驱动机器人时,机器人的有效工作空间如图5所示,由于弹簧的存在,C3S1绳索-弹簧混合驱动机器人的有效工作空间明显向理论工作空间的右上方偏移,且形状和有效区域明显不同于C4绳索驱动机器人。
C3S1绳索-弹簧混合驱动机器人沿X、Y方向上的移动刚度分布如图6所示,计算结果显示,Kx∈[1.786 2, 45.343]×105N/m,Ky∈[3.171 4, 73.731]×105N/m,从整体上来看,C3S1绳索-弹簧混合驱动机器人沿X方向上的移动刚度要明显大于沿Y方向上的移动刚度;而且同样在有效工作空间内,机器人沿X、Y方向上的移动刚度在工作空间的中间区域小,在边界区域较大。
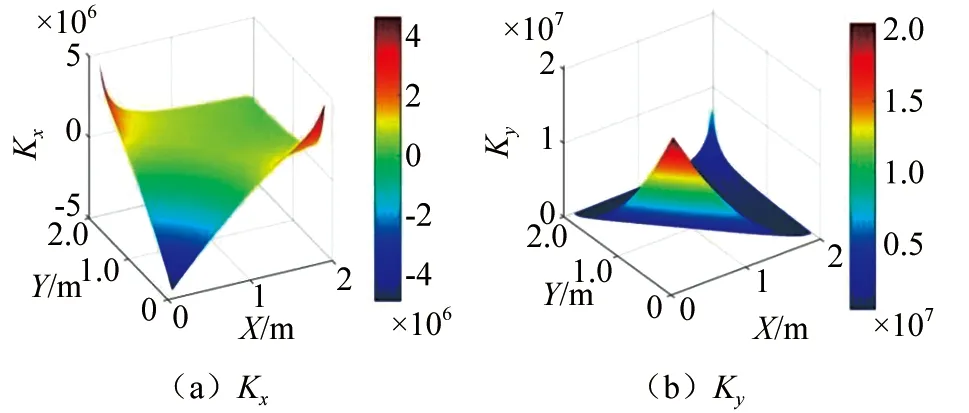
▲图6 C3S1绳索-弹簧混合驱动机器人的刚度分布
通过C3S1绳索-弹簧混合驱动机器人的刚度分布和C4绳索驱动机器人的刚度分布比较可知,当采用弹簧替换1根绳索时,机器人沿各方向上的刚度明显增加,说明C3S1绳索-弹簧混合驱动机器人的刚度特性有所增强。
机构刚度矩阵的特征值反映了解耦后方向矢量上的刚度系数,为了更好地描述机器人刚度的分布情况,采用刚度矩阵的条件数进行衡量,表示为:
(16)
式中:λmax和λmin分别表示刚度矩阵K的最大特征值和最小特征值。Cond可以很好地反应各方向上刚度的大小关系和刚度非各向同性的信息。
根据式(16)计算获得的刚度矩阵条件数Cond如图7所示,结果显示C4绳索驱动机器人的Cond∈[1.265 4,29.271 5],而C3S1绳索-弹簧混合驱动机器人的Cond∈[1.042 4, 27.520 4],表明C3S1绳索-弹簧混合驱动机器人的Cond整体上小于C4绳索驱动机器人的Cond,表明C3S1绳索-弹簧混合驱动机器人各方向刚度的差异较小,即C3S1绳索-弹簧混合驱动机器人各方向上刚度值的分布比较均匀,由此进一步表明了C3S1绳索-弹簧混合驱动机器人具有较好的运动特性。

▲图7 两种机器人的刚度矩阵条件数Cond
5 结论
本研究针对绳索驱动并联机器人的刚度进行了分析,推导出了机器人刚度的解析表达式,并在此基础上给出了绳索-弹簧混合驱动并联机器人的刚度解析表达式。通过对平面4根绳索驱动机器人和3根绳索1根弹簧混合驱动机器人的工作空间和在工作空间内刚度的分布情况进行实例分析,表明3根绳索1根弹簧混合驱动机器人在各运动方向上刚度值分布比4根绳索驱动机器人的刚度分布均匀,具有较好的可操作性能,为进一步研究机器人系统的实验样机平台和控制策略奠定了基础。
猜你喜欢
散文诗世界(2022年1期)2022-01-13
中学生数理化·中考版(2021年10期)2021-11-22
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16