一种无线充电循迹小车控制系统的探究与设计
2023-09-27 14:20郝覃卓韩帅龙江成茹鹏佟维妍
电子制作 2023年17期
郝覃卓,韩帅龙,江成,茹鹏,佟维妍
(沈阳工业大学 化工过程自动化学院,辽宁辽阳,111003)
0 引言
近年来,使用无线充电技术的循迹小车在许多文献中均有涉及,例如《基于超级电容和OpenMV4 的无线充电循迹电动小车设计》一文中提出利用磁耦合共振的方法,将直流电转换为交流高频电,经整流后为超级电容组充电,并通过OpenMV4 摄像头视觉处理循迹行驶;《动态无线充电循迹小车系统的设计与实现》一文中设计驱动模块由两个法拉电容、核心驱动模块以及两个电机构成。本文借鉴融合其中的优点并改进不足,提出一种新的无线充电循迹小车控制系统。
1 总体设计方案
该系统使用无线充电装置对小车进行无线动态充电,该无线充电装置由无线供电发射模块和无线供电接收模块组成。无线供电发射模块通过逆变电路和谐振电路将直流电转换为高频交流电,送至发射线圈内,无线供电接收模块的接收线圈在电磁感应作用下接收高频交流电,再通过整流滤波电路将交流电转换为直流电,产生的电能被存储在超级电容中。
超级电容由4 个2F、5.5V 法拉电容并联组成,辅以二极管保护。因为法拉电容的放电过程不均匀,而单片机却需要稳定的电压供应,所以使用超低功耗的DC-DC 升降压芯片—TPS63001 进行稳压。无线充电模块接收到的电压通过DC-DC 转换为5V 恒流电源电压,为超级电容充电,并且通过OLED 屏幕显示电量。充电1 分钟后充电装置断电,单片机通过ADC 检测供电接收模块的电压输出情况来判断充电是否结束,通过两个红外循迹模块返回的电信号,处理后控制左右电机的运动来实现循迹功能。随后小车自启动并进入自动循迹行驶模式。总体框图如图1 所示。

图1 总体设计框图
2 硬件电路设计
本系统主处理器采用MSP430F149 单片机,具有快速苏醒、低电压、超低功耗等特点。通过控制系统调控红外循迹模块和电机驱动模块,使小车在规定轨道内循迹行驶。外部电源经过无线供电模块转换后,对控制系统提供5V/1A的直流电源输入。
■2.1 主控模块
通过该模块可控制无线充电装置的自动启停和小车循迹行驶。MSP430F149 微处理器通过ADC 检测供电接收模块的电压输出情况来判断充电是否结束,通过两个红外循迹模块返回的电信号,处理后控制左右电机的转动来实现循迹功能。
■2.2 无线供电发射接收模块
无线供电发射接收模块包含XKT-510 芯片(发射端)和T3168 芯片(接收端)两个无线供电模块,与使用线圈耦合的方案相比,本方案具有体积小、能源转变效率高、设计简单的优势。无线供电发射模块及接收模块原理图如图2所示。

图2 无线供电发射及接收模块原理图
(1)发射端设计
发射电路的核心元件为XKT-510 芯片,XKT-510 电路简单,具有电能传送和电磁能量转换效率高、稳定性好、精确度高等优势,只需配合极少的外部元件就可以做成可靠性高、适用范围广的无线供电发射模块。芯片能够将直流电转变为交流电,通过逆变电路和谐振电路将转换后的交流电发送至发射线圈内,当发射线圈和接收线圈互相贴近时,接收线圈会在电磁感应作用下接收来自发射线圈的交流电,最后以直流电的形式向外输出,为超级电容装置充电。
直流电源可通过XKT-510 芯片实现自适应供电电压调控,通过运用电容C 跟电感L 的储能特性,使得电磁在这两种元件之间交替转化,产生高频正弦波信号,从而生成交流电。再利用线圈的电磁感应作用把电能传送到接收模块中,谐振频率可用公式F=计算。此模块的设计频率为200kHz。
(2)接收端设计
T3168 芯片是接收电路的核心元件,具有体积小、输出功率大、电路简单、适配度高的优点,可用于多种电子产品的电池充电和无线供电。主体由外围的并联谐振电路、整流电路和滤波电路构成。当发射、接收模块的并联谐振电路均处于谐振状态时,高频正弦波信号达到峰值,此时能量传输效率也达到峰值,线圈接收到的交流电经过整流、滤波整合处理后,最终输出5V 直流电,为小车提供稳定的工作电压。
■2.3 稳压电源模块
超级电容由4 个2F、5.5V 法拉电容并联组成,辅以二极管保护。无线供电模块接收到的电压通过PWM 控制型DC/DC 转换器转换为5V 恒流电源电压,给超级电容充电。超级电容放电时电压不断下降,放电过程不均匀,为保证其他元器件供电正常,并尽可能充分利用其中的电能,就需要能够自动升降压的稳压电路。超低功耗的TPS63001 芯片是一款高效升降压转换器,具有稳压输出和负载断开时芯片自动关闭的功能,工作效率最高达到95%,可以作为无线充电小车的主要稳压电路,使超级电容在放电过程中稳定输出5V,从而实现系统的稳定运行。超级电容模块原理图如图3 所示,稳压模块原理图如图4 所示。
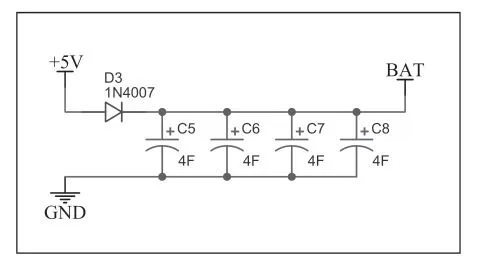
图3 超级电容模块原理图

图4 稳压模块原理图
■2.4 电机驱动模块
HR8833-双通道H 桥电机驱动芯片能在低压状态下运作,HR8833 有两路H 桥驱动,可以驱动两个直流有刷电机,或者一个双极步进电机及其他感性负载。H 桥驱动器每一个桥的功率输出模块由N 通道功率MOSFET 组成,每个桥包含整流电路和限流电路,内部关断功能包含过流保护、欠压锁定保护、短路保护和过温保护,并提供一个故障检测输出管脚。通过PWM 波输入值AIN 与BIN 驱动电机运转,可调整PWM 波占空比与电机转速,该设计实现了电机正转、反转的功能。系统启动后,利用MSP430F149 微处理器I/O 口输出的PWM 波驱动电机,通过分别控制左轮和右轮的速度和方向来完成无线充电循迹小车启动、加速、减速、差速转弯、刹车等功能。
■2.5 红外循迹模块
红外循迹模块主要由TCRT5000 传感器构成,TCRT5000的检测反射距离适用区间为1mm~25mm,使用宽电压LM393 比较器输出,配有多圈可调精密电位器调节灵敏度,具有驱动能力强、信号干净、波形工整的优点。当不断发射的红外线未被反射或强度较弱时,红外接收管断路,此时传感器输出端为高电平,指示二极管熄灭;当物体出现在检测范围内时,红外线被反射回且强度足够大,红外接收管饱和,传感器的输出端为低电平,指示二极管亮起。根据此原理可实现小车循黑色轨迹行驶,遇到白色空地时停下。
3 软件程序设计
软件程序设计采用MSP430F149 微处理器作为主控元件,单片机接通电源时立刻开始计时,同时无线供电模块开始给超级电容充电,定时器计时1min 后,单片机和稳压电源相连接的继电器断开后共同切断无线供电模块的电源,小车随之被启动,单片机的定时器模块确保小车在连续充电1min 以后不再充电。行驶时红外循迹模块对规划路线循迹,据此判断小车中轴线是否偏离黑线及偏离程度,进而控制舵机的转向以及使左、右侧电机的转速产生差异,实现差速转弯。小车持续前进直到红外循迹模块识别到达指定地点。
MSP430F149 微处理器通过采样可以检测电机两端电压的大小和与循迹模块红外探头并联的电容电压大小,以此控制微控制器输出PWM 波的频率。当PWM 波处于高电平时MOS 管导通,电机驱动工作,小车车轮转动;当PWM波处于低电平时MOS 管不导通,电机驱动不工作,小车车轮停止转动。PWM 的高电平和低电平交替产生,以此控制电机驱动。在动态充电过程中,电动小车遇到黑色的充电线圈时,循迹模块红外探头的光敏电阻两端电压减小,MSP430F149 微处理器通过ADC 采样的两个通道同时检测到两端电阻电压减小。程序片段如下:
4 测试结果
表1 中五个实验组的超级电容均为4 个2F/5.5V 电容并联组成。

表1 供电模块数据
5 结语
本文给出了一种无线充电循迹小车控制系统的设计方案,此方案包括以MSP430F149 微处理器为核心的主控模块、无线供电模块、稳压电源模块、电机驱动模块与红外循迹模块。根据超级电容存储电压及距离测试结果数据,均已论证本设计的合理性与可行性。
猜你喜欢
大电机技术(2022年4期)2022-08-30
湘潭大学自然科学学报(2022年2期)2022-07-28
中国特种设备安全(2021年5期)2021-11-06
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
模具制造(2019年7期)2019-09-25
文苑(2018年22期)2018-11-19
电子测试(2018年15期)2018-09-26
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17