
基于北斗高精度定位的重载铁路列检安全作业管理平台设计
2023-10-16 19:12项鹏飞
计算技术与自动化 2023年3期
关键词:电子地图
项鹏飞

关键词:北斗高精度定位;重载铁路;列检作业;电子地图;安全预警;电子围栏
列检作业人员上线作业主要依靠人工监督,来车接近通过人工嘹望的原始方式进行盯控,一旦出现过车嘹望不及时或作业人员超出安全区域作业的情况,极易造成人员伤亡;同时由于作业场作业范围大,人员是否到达指定作业区域、是否按标准用时进行作业难以衡量;作业安排仍由人工分配,作业量统计仍采用原始方式,无法做到均衡分配、信息化统计;工作中设备与设施的巡检和交接完全由人工纸质填记,没有有效的卡控措施,造成人工作业耗时耗力,效率低下。基于这种现状,有必要建设一套列检作业安全管理系统,用技防手段辅助人防手段来实现盯控和监督提醒,提高现场工作的管理水平和效率。为满足高载铁路列检作业安全管理的高精度定位要求,选用我国自主设计的北斗卫星定位系统实现列检作业人员及车辆的定位及轨迹追踪,该系统面向民用市场开放,配合北斗地面增强站,可使定位精度达到厘米级。
楊美皓等人针对铁路作业人员安全问题,构建了铁路作业人员安全监控系统,采用北斗高精度定位技术、电子地图、载波相位差分技术等实现作业人员的准确定位,并能够对违规闯入或越过电子围栏的人员给予预警,但是应用局限性较大且成本较高。李煜等人针对铁路控制中心无法实现作业车检修的准确定位监控问题,构建了高铁作业车的实时定位监控系统,该系统在.NET平台上搭建,并利用MYSQL数据库等技术实现,该系统具备作业信息的实时性采集与监测功能,但该系统定位准确度较低。因此,设计基于北斗高精度定位的重载铁路列检安全作业管理平台,降低列检作业风险水平,提高高载铁路的精确定位、实时监控能力。
1重载铁路列检安全作业管理平台
1.1重载铁路列检安全作业管理平台总体框架
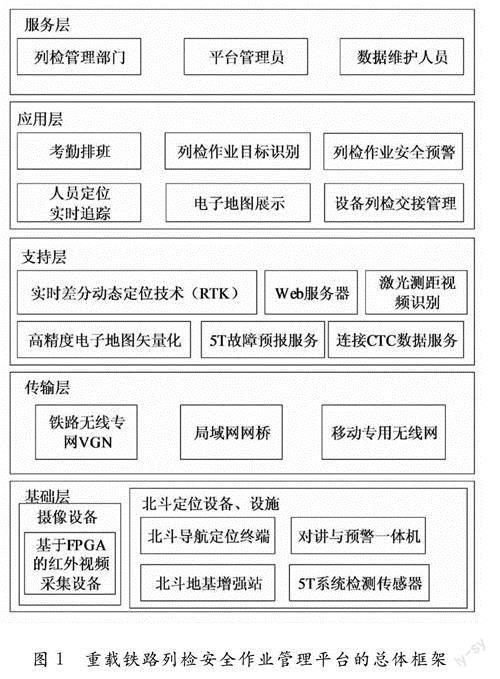
重载铁路列检安全作业管理平台的总体框架如图1所示。
该平台由五部分构成,各层的详细内容如下:
(1)基础层。该层由重载铁路列检作业现场摄像设备和定位终端设备、设施构成,利用基于FP-GA的红外视频设备获取重载铁路列检作业现场人员、车辆图像信息;定位终端设备、设施,如北斗卫星导航定位终端、北斗地基增强站、对讲与预警一体机、列检手持机喇叭器、5T系统检测传感器等。
(2)传输层。该层是整个系统架构结构中的关键层次之一,可实现数据的端到端通信,主要包括铁路无线专网、局域网网桥、移动专用无线网等信息传输通道。
(3)支持层。该层可实现北斗地基增强/北斗定位[实时差分动态定位技术(RTK)]、高精度电子地图矢量化、5T故障预报服务、接人调度集中控制(CTC)数据服务、接人铁路货车技术管理信息系统(HMIS)数据、Web服务器、激光测距影像识别等功能,并可对重载铁路列检作业现场所有数据信息进行融合处理,为平台应用层提供有力数据支持。
(4)应用层。该层可实现重载铁路列检安全作业管理,具体包括考勤排班、列检作业目标识别、安全预警、设备巡检交接管理、人员位置实时跟踪、故障预报处理、电子地图展示等职能。
(5)服务层。平台管理、维护人员及车辆列检管理部门的有关工作人员是该平台的合法身份用户,用户可通过PC端和移动客户端访问重载铁路列检安全作业管理平台。
1.2重载铁路列检安全作业管理平台的硬件设计
1.2.1红外视频图像采集设备
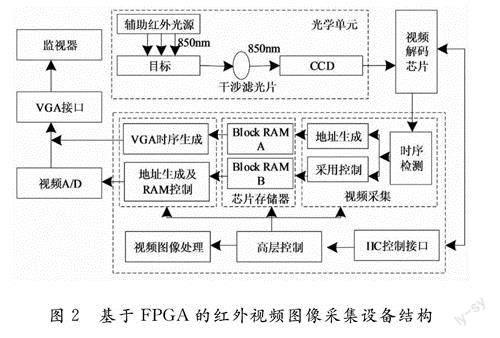
由于重载铁路列检作业现场视频图像采集过程中会受到现场环境、气象条件各因素的干扰,外部光源具有强烈的变化,严重影响采集图像的视觉效果。而红外图像对环境的适应度更强,在夜晚、恶劣天气下也能采集到高质量的视频图像,满足重载铁路列检作业要求;同时,辅助红外近光源不会影响列检作业现场工作人员及车辆驾驶员的正常作业,因此,重载铁路列检安全作业管理平台的基础层通过基于FPGA的红外视频图像采集设备获取列检作业现场图像信息,基于FPGA的红外视频图像采集设备结构如图2所示。
该设备上侧为红外视频图像采集的光学单元,内置CCD面阵传感器,通过该摄像头可获取到720×576分辨率的标准PAL列检作业红外视频流,图像视觉效果达到后期处理要求。其辅助红外光源为36枚LED,由其发送红外线投射于列检现场作业人员、作业车辆上,并通过CCD摄像头实现红外视频图像的获取。为降低其余光源对成像效果的干扰,将适应CCD光谱特性的光学干涉滤光片加入光学单元中,并将其置于CCD摄像头前,以此完成列检作业现场红外视频图像的采集,可使图像灰度更加均匀,将环境等因素对成像效果的影响降至最低。FPGA芯片集红外视频的采集、控制、保存及成像功能于一体。通过光学单元获取列检作业红外视频信息流后,经视频解码芯片的解码处理,传输至XC2VP30型号的FPGA芯片中,首先对其进行时序检测,获取视频帧的时序数据,并完成时序定位的处理,再将其保存于芯片自身的存储器中,通过视频显示器完成红外图像的展示。视频帧数据经A/D转换后,通过VGA接口与重载铁路列检安全作业管理平台的监控设备连接,完成列检作业视频的采集。
1.2.2北斗高精度定位终端设备
将北斗高精度定位终端设备运行于嵌入式Linux操作系统中,可有效提升设备的运行速度,由于该系统具备卓越的内核处理能力,可允许多条请求同时访问,具有响应效率高的特点,并且无响应拖延问题,系统更加稳定。该定位终端设备选用高精度解算定位主板,并与北斗、GPS等多星系融合算法具有较高的兼容性,其内配置高质量螺旋天线,结合抗干扰技术有效提升设备的抗干扰能力。利用全星座北斗GNSS定位通信网络实现数据传输,可满足数据通信的瞬时性要求。采用NMEA-0183标准协议,并以TSIP格式进行数据存储。
北斗高精度定位终端设备可与所有平台的GNSS定位手持接收机进行无缝连接,其定位准确度可达到分米级别,与千寻位置服务建立关联后,可有效提升其定位准确度,达到厘米级别。北斗高精度定位技术对接千寻位置服务架构如图3所示。
1.3高精度電子地图的矢量化处理技术
平台支持层将获取的高载铁路的各类设备高精度电子地图进行矢量化处理,实现高载铁路线路的划分及标注.其中线路标注为带状,道岔用块状进行记录,并将高载铁路公里标信息标注于相应位置处。采用QGIS软件实现高载铁路高精度电子地图的矢量化操作。矢量化处理过程如下:
第一步:调入高清影像地图。
第二步:对WGS84坐标轴进行设定,以实现高载铁路线路坐标的转换处理。
第三步:确定高载铁路线路的起始、终点位置坐标,在两点之内完成点线面图层的规划处理,并将公里标标记于高载铁路线路中,为后续的列检作业计划的加载、电子围栏的生成打下基础。
第四步:为高载铁路的各核心场所设置矢量化图元,并作标记。
第五步:实现高载铁路高精度电子地图展示。
1.4重载铁路列检作业目标识别
平台应用层的列检作业目标识别模块,采用Cstx小波融合技术对采集到的北斗卫星信号进行解析,获取列检作业图像,经降噪、增强、边缘检测一系列处理后,基于Hausdorff距离的自动识别列检作业目标,完成列检作业状态监测。
1.4.1基于Cstx小波融合的北斗卫星信号解析
利用Cstx小波融合方法对北斗卫星信号进行解析处理,使列检作业安全管理平台的资源损耗量有效降低,提高列检作业安全管理平台的计算效率。北斗卫星信号归于图像信号之列,对其进行解析处理后,可得到R、G、B及Y通道图层融合的彩色图像。各通道图像边缘的灰度差存在差异性,导致信号解析效果无法控制。选择灰度差大的通道,并视之为解析均值,可使信号解析率获得一定程度的提升。
对于北斗卫星信号,获取其灰度差最高的信号源,利用Cstx小波融合实现其二维小波的解析分离,可通过式(1)实现信号的解析描述:
1.4.2基于Hausdorff距离的列检作业目标自动识别
北斗卫星信号解析处理后,采用Hausdorff距离方法对基于北斗卫星定位的列检作业目标进行自动识别,目标识别过程如下:
第一步:在北斗卫星信号解析处理的基础上,采用中值滤波法对列检作业图像进行降噪处理,再通过直方图均衡化处理增强图像,提高列检作业图像质量。
第二步:利用Canny边缘检测算法获取列检作业图像边缘信息,提取其边缘位置信息之外,可实现边缘像素点方向信息的确定。
第三步:通过形态学滤波算法确定列检作业目标轮廓,通过(A+B)@B处理使目标边缘线具有连续性,勾勒出完整的目标轮廓。
第四步:对列检作业边缘图像作Hausdorff距离转换处理,确定其具有相同大小的距离映射图,距离大小即为该图中各像素点值,距离转换的描述公式为:
第五步:采用粗匹配精定位方法实现列检作业模板的自动识别。对待匹配图像内模块所在位置进行粗略确定是粗匹配的方法,匹配过程为:实现图像I及模板的分辨率的同步更新是列检作业目标识别首要步骤,以使其处于低分辨率状态,衡量二者间的相似度,基于局部最小值确定备选匹配点,数量为5~10个。再在各匹配位置周围生成阵列,以获得完整的匹配点,完成备选点的选取,阵列尺寸可为3×3或5×5。在备选点粗匹配的基础上,实现匹配位置的准确确定,是精定位需实现的目标。根据阈值大小判断两点集是否匹配,当匹配结果小于阈值时,则两点集匹配;反之,则判断二者无法匹配。
1.5高载铁路列检作业人员安全预警
应用层的列检作业安全预警模块调用矢量化处理后的高载铁路高精度电子地图,并加载列检作业日计划后,即可实现电子围栏区域的智能化获取。通过列检作业人员配备的北斗定位终端设备获取其准确位置信息,在利用北斗卫星信号完成列检作业目标的自动化识别的前提下,采用电子围栏判断列检作业人员是否处于安全作业范围之内,为越过电子围栏边界的作业人员发送预警信息,实现其列检作业安全的实时性管理。另外,在高精度电子地图上.将安全提示信息载入对应的高载铁路重要场所位置坐标处,列检作业人员途经对应位置后,即可自动向其北斗终端定位终端设备发送警示信息,起到列检作业安全预控作用,保证列检作业人员的人身安全,降低安全事故发生率。
2实验分析
将点岱沟列检作业场作为研究对象,将本文平台应用于该作业场的列检作业安全管理中,实现列检作业人员的监控、安全预警、定位等,分析本文平台的实用性。
北斗卫星信号的解析能力影响列检作业目标的识别效果,分析北斗卫星信号利用率指标,并与解析前的信号利用情况作对比,分析本文平台的性能,实验结果如图4所示。
分析图4可知,采用Cstx小波融合对北斗卫星信号进行解析处理前,信号利用率呈大幅度波动性变化,总体利用水平较低;经小波融合处理后,有效提升了北斗卫星信号的利用率,利用率接近100%。实验结果表明,本文平台具有突出的北斗卫星信号解析性能。
获取解析后的高载铁路列检作业图像,建立列检作业数据集。在数据集中随机选择一张图像,如图5所示,通过分析列检作业目标识别结果,验证本文平台的监控性能,实验结果如图6所示。
由图5可知,所采集的原始列检作业图像含有一定量的噪声,图像对比度低,存在细节损失,会直接影响图像目标的识别效果,因此,对其进行去噪及直方图处理。由图6(a)得出,经处理,列检作业图像噪声有效去除,图像质量有所提升,图像细节信息得以恢复,其对比度、清晰度得到明显改善,提升图像的视觉效果;由图6(b)的边缘提取结果可知,图像边缘轮廓清晰,轮廓线连续,能够完整勾勒出图像边缘,表明本文平台具有较强的边缘检测能力;由图6(c)得出,本文平台可识别列检作业目标,并用红色线条进行标记。实验结果表明,本文平台具有列检作业目标识别能力,可完成对列检作业的监控。
根据高载铁路高精度电子地图及列检作业的日任务计划完成对电子围栏区域的确定,是实现本文平台列检作业安全预警的必要条件。采用本文平台对列检作业进行安全预警,通过分析本文平台的预警结果,验证本文方法的预警能力,实验分析结果分别如图7、图8所示。
分析图7可知,图中黑色阴影即为确定的电子围栏范围,视该范围为安全作业区域。在该区域内作业方可确保列检作业的安全性。当列检作业人员越过电子围栏边界或处于边界时,本文平台将向列检作业人员携带的对讲与预警一体机发送预警信息。如图8所示的安全预警结果中包含北斗定位终端设备编号及列检作业位置、时间等信息。实验结果表明,本文平台可完成电子围栏的获取,并具有列检作业安全预警功能,确保列检作业的安全性。
将北斗高精度定位技术应用于列检作业管理中,通过定位结果分析本文平台的定位能力,实验结果如图9所示。
分析图9可知,应用北斗高精度定位技术对高载铁路列检作业进行定位管理后,可实现列检作业目标的准确定位,用红色方框进行标记,同时,可完成对作业目标轨迹的跟踪,其运动轨迹用虚线标注。实验结果表明,本文平台可实现列检作业目标的定位、轨迹跟踪功能。
3结论
将本文平台应用于点岱沟列检作业场中,对其进行列检作业安全管理,分别从列检作业现场目标识别、定位及安全预警方面分析本文平台的应用性能。实验结果表明:
(1)可实现列检作业图像的处理,并识别出列检作业目标。
(2)可获取电子围栏,并对跨越其边界的作业人员进行安全预警。
(3)可实现列检作业人员的准确定位及轨迹追踪。
猜你喜欢
猪业科学(2024年1期)2024-02-27
猪业科学(2024年1期)2024-02-27
文理导航(2024年1期)2024-01-07
城市轨道交通研究(2022年11期)2022-12-10
铁道通信信号(2020年10期)2020-02-07
读与写·教育教学版(2019年12期)2019-12-31
中国交通信息化(2018年4期)2018-08-21
科学与财富(2017年9期)2017-06-09
测绘科学与工程(2017年5期)2017-05-07
中国教育技术装备(2015年21期)2015-03-11
