
应用于机床自动上下料系统的机器人手爪
2023-10-23 02:09高霄李冬艳
金属加工(冷加工) 2023年10期
高霄,李冬艳
西安精雕精密机械工程有限公司 陕西西安 710000
1 序言
随着机器人研究的深入和传感技术的不断更新,机器人的应用领域也在不断拓宽,机器人手爪作为机器人的末端执行机构,是一个高度集成的、具有多种感知功能的机电系统,涉及的领域包括结构学、仿生学、自动控制以及传感器技术等学科[1,2]。机器人手爪按照抓取对象的不同分为通用手爪和专用手爪,通用手爪指灵巧手[1],属柔性手爪,仿人手去抓取任何物体,近年来各类型通用手爪的研究不断迭代更新,灵巧手越来越接近人手功能,应用在医疗、空间探测、海洋资源探测、军事侦察以及危险环境作业等场所[1,3],通用手爪结构复杂,需要同时具备识别和抓取功能,手爪一般集成几十个各种类型的传感器以及柔性的抓取结构[1];专用手爪一般指应用在某些特定场合或特定产品的工业流水线上的手爪,其结构简单,集成传感器少,而应用在机床自动上下料系统的机器人手爪属于专用手爪[2]。本文列举分析应用在机床自动上下料系统的专用手爪典型结构,主要针对质量在300kg以内、尺寸在600mm×600mm×500mm(长×宽×高)以内的工件进行自动搬运,概括总结其在机床自动上下料系统领域的应用场合。
2 机器人手爪类型
应用在机床自动上下料系统的机器人手爪类型较多,按照手指结构区分,常用的有两指手爪、三指手爪、货叉式手爪、握爪类手爪以及吸盘类手爪;按照驱动方式又可分为气动手爪、液压手爪以及电动手爪[4];按照末端抓取机构数量又可分为单手爪、双手爪以及多手爪结构。
机床自动上下料系统需要包含具有零点定位功能的机内夹具,机内夹具安装在机床工作台上,与工件随行夹具或直接与工件配合,实现工件在机床内的高精度重复定位,而机器人手爪通过抓取工件随行夹具或直接抓取工件,实现其在机内夹具与储料系统之间的流转。
2.1 典型手爪结构
(1)两指气动手爪 两指气动手爪在机床自动上下料系统中的应用最广泛,简称两指气爪。典型的两指气爪结构如图1所示,包含气爪本体和两个气爪活动端,在气压或弹簧的作用下,两个气爪活动端相对于气爪本体往复平动。两指气爪应用较为成熟,相关供应商均有成熟的产品可选用,两指气爪活动端安装手指,通过手指实现被抓取物的准确定位和夹取,机器人手爪由两指气爪和两个手指构成,图2所示为机器人手爪抓取随行夹具,图3所示为机器人手爪直接抓取工件,目前更为常用的是机器人手爪抓取随行夹具,工件固定在随行夹具上,这种方式可实现夹具和手指的标准化,图2所示即为典型的机器人手爪抓取电极夹具座,电极夹具座为标准电极随行夹具,通过PLC和电磁阀自动控制气爪的开合,实现手指1和手指2对随行夹具的夹紧和松开,进而通过机器人的路径设置搬运随行夹具上的工件到指定位置。

图2 机器人手爪抓取随行夹具

图3 机器人手爪抓取工件
两指气爪适用于搬运质量、体积较小的工件,其与待搬运物的定位方式主要为仿形,夹紧主要靠摩擦力及托举。
(2)三指气动手爪 三指气动手爪简称三指气爪,其与两指气爪原理类似,输出为三个活动端,适合直接抓取形状较规则的工件,图4所示为三指气爪抓取工件,三指气爪具有二次定位功能,可在一定范围内调整被抓取工件的中心。三指气爪也有成熟的产品可直接选用,按照被抓取工件的特征选择合适的气爪型号,手指结构根据被抓取工件定制。

图4 三指气爪抓取工件
三指气爪可搬运工件的类型由工件外形及材质确定,其与待搬运物体的定位和夹紧方式也是靠仿形、摩擦或托举。
(3)货叉式手爪 货叉式手爪结构简单,在自动化仓储系统中的应用极为广泛,在自动上下料系统中用于叉取托盘或工件,自动上下料系统对叉取对象的精度有较高要求,因此需要在货叉上增加精确定位的装置。货叉式手爪结构如图5所示,定位销用于限制被抓取物在水平方向上的自由度,竖直方向位置靠重力和定位面保障。货叉式手爪作为常规的六轴机器人末端手爪时,机器人手爪必须保持平移姿态,第六轴不可有旋转动作。

图5 货叉式手爪结构
货叉式手爪适合搬运质量、体积较大的工件,手爪不需要驱动源,结构及控制方式简单,由于使用货叉搬运的形式,托盘底部或工件上需要设计货叉取放料空间。
(4)握爪式手爪 握爪式手爪结构如图6所示,由握爪主夹紧端和握爪工具端两部分组成,握爪主夹紧端固定在机器人末端,握爪工具端固定在被抓取托盘或工件上,握爪主夹紧端通过气动/液压/弹簧等形式实现对握爪工具端的夹紧/松开,从而实现对工件的搬运,握爪式手爪主夹紧端和工具端的重复定位精度可保证被搬运工件的位置精度。握爪式手爪也可选用成熟的产品,可搬运工件的质量和体积根据握爪型号确定,成本较高,应用握爪式手爪搬运托盘或工件时,被搬运工件需要增设握爪工具端安装孔位。

图6 握爪式手爪
(5)吸盘手爪 吸盘手爪(见图7)属于气动手爪,包括真空发生器和真空吸盘,真空发生器将输入端的正压转换为负压,负压供给吸盘将工件吸起,从而实现对工件的搬运。吸盘手爪适合搬运薄板类工件、表面规则的球形工件等,抓取薄板类工件时,可根据其尺寸大小在同一抓取面布置多个吸盘,以实现对工件的稳定抓取。

图7 吸盘手爪
2.2 双手爪结构
在一些加工节奏要求较快的场合,为减少上下料机床等待时间,通常需要配置机器人双手爪结构,双手爪结构类型较多,包含桁架式双手爪结构[5]、基于机器视觉的双手爪结构[6]、双工位双手爪结构[7]以及含旋转模块的双手爪结构[8],应用在机床自动上下料系统的双手爪结构一般为上料手爪和下料手爪集成安装在机器人末端,双手爪为上述典型手爪结构的二次集成[5]。应用在机床自动上下料系统的典型双手爪结构如图8所示,包含旋转模块、手爪安装板以及上料手爪和下料手爪,上料手爪和下料手爪固定安装在手爪安装板上,手爪安装板固定安装在旋转模块输出端,随旋转模块转动,图示旋转模块有两个位置,位置1代表初始位置,位置2代表旋转模块转动180°后位置,上下料动作方式如下所述。
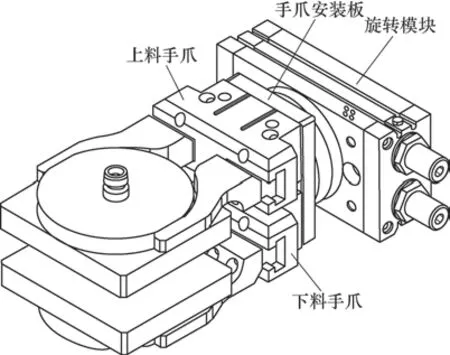
图8 典型双手爪结构
双手爪上下料动作:确认上下料手爪空置→机器人控制旋转模块处于位置1→上料手爪从储料系统抓取毛坯料托盘→机器人控制旋转模块旋转至位置2→下料手爪从机床抓取成品料托盘→机器人控制旋转模块处于位置1→上料手爪将毛坯料托盘放置在机床夹具上→机器人控制旋转模块旋转至位置2→下料手爪将成品料盘放置在成品储料位,重复以上步骤。
机器人双手爪结构应用在加工节奏要求较快的机床自动上下料系统中,实际应用结构形式多样,旋转模块可使用其他形式的结构代替,目的为实现两个手爪的位置切换,双手爪安装在六轴机器人末端时,其第六个旋转轴可代替图8所示的旋转模块。
2.3 杆状类工件抓取双手爪
随着机床自动上下料系统客户需求的不断增加,需要针对不同客户的目标产品开发定制不同种类的机器人手爪,杆状类工件的自动上下料加工需求是一种典型的需求方案,典型的杆状类工件,如刀杆,其特点是工件尺寸小、加工节奏快,需要使用双手爪结构,但典型的双手爪结构(见图8)应用在杆状类工件的抓取中存在整体尺寸大、结构及动作复杂以及成本高等问题。
针对刀杆的机床自动上下料需求,开发了一款适合杆状类工件抓取的双手爪结构,手爪结构如图9所示,主体结构包含双气缸主体、左手指组件、右手指组件以及手指固定端,双气缸主体设置前后两个平行气缸,左手指组件和右手指组件在前后两个平行气缸的往复运动,与手指固定端形成夹紧、松开结构,如图9a所示,动作方式如下所述。

图9 杆状类工件抓取双手爪
左手指夹紧的动作方式,如图9b所示:气缸1通气,驱动活塞1向左移动,活塞1推动左手指组件向左移动,左手指与左手指组件末端相连,随左手指组件向左移动,与手指固定端配合形成一个夹指,夹取杆状工件,如图9a所示,气缸1持续通气,左手指夹取力保持;左手指松开的动作方式:气缸1断气,左手指组件在弹簧的作用下向右移动复位,推动活塞1向右移动,左手指与左手指组件末端相连,随左手指组件向右移动,松开杆状工件,气缸1不通气,左手指在弹簧力作用下保持松开状态。
杆状类工件抓取双手爪动作流程如图10所示。

图10 动作流程
杆状类工件抓取双手爪集成两个驱动气缸为一体,整体结构紧凑,并且相较于典型的成品气缸集成类双手爪,成本大幅下降,目前已成熟应用于刀具磨削、异形刀杆加工和医疗用品等杆状类工件的机床自动上下料系统中。
2.4 机器人快换手爪
机器人快换手爪也是目前应用于机床自动上下料系统的一种抓取模式[9],尤其在产线式机床自动上下料系统中,一种类型的手爪可能无法满足多种类工件抓取的需求,快换手爪即可根据目标工件的不同自动更换手爪。机器人快换手爪的结构如图11所示,包含一个安装在机器人末端的快换主夹紧器(见图11a)和多个快换工具适配器(见图11b、图11c),快换主夹紧器和工具适配器配合可实现工具适配器末端手爪的气路和电路接通,从而控制其对工件的取放。安装在机器人末端的快换主控制器,根据主控程序设定,切换不同的工具适配器手爪以抓取不同工件进行机床自动上下料,工具适配器数量一般为两个及以上,具体按需配置。快换手爪的主控制器配套工具适配器也有成熟的产品供选用。
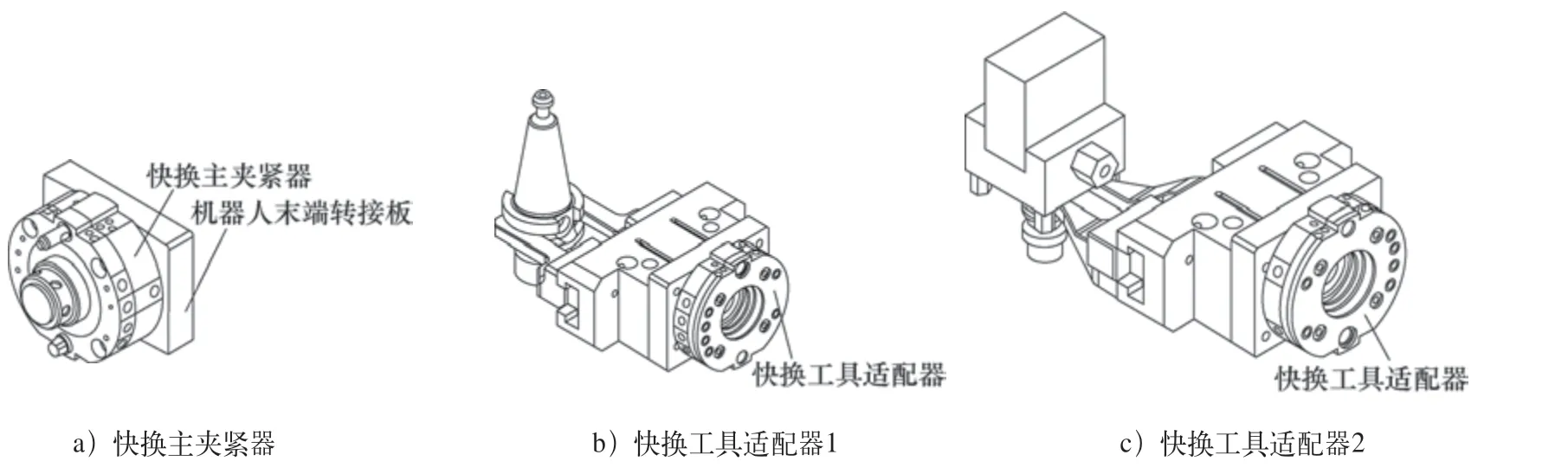
图11 机器人快换手爪结构
3 机器人手爪驱动方式
典型机器人手爪的驱动源包括气动、液压和电动,部分手爪不需要驱动源仅通过结构配合即可完成定位抓取,如货叉式手爪。气动手爪通过清洁后的压缩空气即可作为驱动源,目前的生产车间均配置空气压缩系统,其易获取、零污染的特性使其在机床自动上下料系统领域得到了充分的应用[5,10]。液压驱动可应用于夹紧力及夹取稳定性要求更高的场合,液压驱动需要配液压站,成本较气动高。电动手爪则应用于一些多形态、多种类抓取的复杂场合,电动手爪一般内置传动机构,动作复杂,技术要求和成本较高[5]。
4 机器人手爪控制方式
P L C控制系统属于当下主要的机器人控制系统,其可依赖各种控制技术,完成对工业机器人的全面操控,使其满足工业生产需求[10]。以典型的气动手爪为例,机器人手爪的控制方式包括手爪开合的控制、确认开合位置的反馈以及防呆检测。
手爪开合的自动控制通过电磁阀实现,电磁阀的动作则受控于PLC主程序,当机器人移动至指定位置时,PLC主程序控制电磁阀动作,如手爪打开,自动定位、夹取工件后手爪闭合,可按照手爪的控制方式选择不同类型的电磁阀。确认开合位置的反馈需要通过传感器检测,磁性开关在气动手爪中的应用较广泛,磁性开关利用磁场的作用实现电路的开关,与带有磁环的活塞配合检出气爪的开合情况,反馈至主PLC程序,确保开合动作执行正确;光电类传感器也可检测手爪开合情况,如图9a所示的传感器即可检测是否取料成功,反馈至主PLC程序,具体按照使用要求选择。防呆检测包括待夹取工位是否有料、手爪取放料是否成功、放料位是否空置等,防呆检测的形式多样,包括光电传感器、无线射频识别技术以及其他检测方式,有时配合机床的在线检测功能,确保自动供料机器人稳定抓取、与机床正常通信、机床自动上下料系统的稳定连续运行。
5 结束语
本文总结了应用在机床自动上下料系统中的机器人手爪结构,包含典型的手爪结构以及自研的杆状类工件抓取双手爪,具体的选用根据实际情况确定,选用原则是形式可靠、结构简单、成本低。本文列举的只是应用于限定尺寸、质量范围内的机床自动上下料系统常用机器人手爪结构,所含手爪种类只是部分,且应用场合存在局限,随着工业自动化及新型技术的发展,期待相关领域的新发展和更大突破。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
哈尔滨轴承(2021年4期)2021-03-08
金属加工(冷加工)(2020年6期)2020-07-09
建材世界(2020年1期)2020-05-24
设备管理与维修(2020年15期)2020-02-15
电子制作(2018年24期)2019-01-03
制造技术与机床(2017年10期)2017-11-28
荣誉杂志(2017年7期)2017-08-23
机械工程师(2014年12期)2014-12-23
机电产品开发与创新(2014年6期)2014-03-11
