安装主动侧杆的飞机的人机交互控制系统研究
2023-11-01 10:17孟小宝邹泉何欢欢范雪谢蓉
航空科学技术 2023年8期
关键词:模糊控制
孟小宝 邹泉 何欢欢 范雪 谢蓉
摘 要:主动侧杆人机交互控制是一种具有广泛应用前景和重要意义的技术,它不仅可以减轻飞行员的负担,也可以提高飞机的性能和安全性。为了解决飞机执行器出现故障時可能出现的飞机失控问题,本文构建了含有主动侧杆的飞机中飞行员与控制增稳系统之间的并联人机交互控制架构,设计了一种新的主动侧杆与飞行员交互方式,主动侧杆不仅传递操纵指令,还通过触觉反馈向飞行员传递飞行状态,使飞行员能够快速感知飞机故障并采取相应措施。同时,设计了控制增稳系统,选用自适应控制器,并在此基础上设计了改进型自适应控制器+PID控制器。利用模糊控制机制动态分配人机控制权重,为飞机系统和飞行员之间的交互提供更加灵活和精确的控制方式。最后,通过仿真验证了所设计的含主动侧杆的人机交互控制方法的有效性。
关键词:主动侧杆; 飞机执行器故障; 自适应控制; 模糊控制; 人机交互系统
中图分类号:V249 文献标识码:A DOI:10.19452/j.issn1007-5453.2023.08.008
基金项目: 航空科学基金(20181353014)
驾驶杆是飞行员传递操作指令的重要装置,对于固定翼飞机,飞行员通过操纵驾驶杆控制飞机舵面的偏转,以控制飞机的俯仰和滚转运动。电传操纵系统取代了机械连接装置,飞行员与计算机通过指令信号交互,传统中央杆也被侧杆取代。主动侧杆可以为飞行员提供关于飞机飞行状态的可触化和可视化反馈,使得飞行员能够更好地感知飞机的飞行状况。人机交互技术是近年来备受瞩目的技术领域,其研究的核心问题在于系统与用户之间的交互关系。在航空领域,飞行员与控制增稳系统之间的交互控制是一个复杂的过程,在设计和开发飞行员与控制增稳系统之间的人机交互控制系统时,需要考虑更多的因素,以确保飞行的安全和可靠性[1-2]。目前,对于主动侧杆的研究主要集中在主动侧杆装置设计[3-6]、主动侧杆人感系统设计[7-10],以及人机闭环飞行品质方面[11-15]。而在人机交互系统的研究中,主要关注智能汽车驾驶方面的人机决策接管[16]、机器人领域的人机共享触觉控制[17]、飞行管理系统进行了人机交互分析[18-21]、人因工程角度优化飞机操作界面设计[22-27],以及人机功能分配[17,28-29]。
本文旨在探讨飞机执行飞行任务过程中飞行员与控制增稳系统之间的人机交互问题,并在交互过程中设计了主动侧杆故障触觉提示功能,以进一步提高飞行员与控制增稳系统组成的交互系统之间的灵活性和适应性。含主动侧杆飞机人机交互控制是一种创新的人机交互技术,可以为人机交互技术的进一步发展提供新的思路和方法。
1 主动侧杆分析及建模
1.1 主动侧杆分析
1.1.1 驾驶杆分类
驾驶杆有两大类,分别是中央杆(或中央盘)和侧杆,其中侧杆又包括被动侧杆和主动侧杆[3,30]。在传统的机械操纵系统中,飞行员通过中央杆(或中央盘)来操纵飞机舵面的偏转;随着电传操纵系统的产生,飞机驾驶杆也逐渐从中央杆(或驾驶盘)向侧杆发展。
侧杆是安装在飞行员座椅侧面的操纵装置,相比于中央杆,侧杆操纵有着更多的优势,它能更有效地利用座舱资源,拓宽飞行员的视野,同时提高飞行员的抗过载能力。侧杆与飞机舵面之间没有机械连接,飞行员操纵侧杆产生杆位移,杆位移以电信号的方式传递给飞控系统实现对舵面偏转的控制。为了弥补侧杆与舵面没有直接连接导致的飞行员操纵力感匮乏,被动侧杆通过弹簧阻尼等机械装置构成的人工感觉装置,给飞行员提供一定的操纵反馈,然而这种人工加载的模拟的操纵力感并没有与飞机的运动状态关联[11];相比而言,主动侧杆采用伺服控制系统实现操纵力感加载,可以为飞行员提供与飞机运动状态相关的操纵力,使飞行员可以通过操纵力的变化判断飞机的飞行状态[12]。中央杆及侧杆示意图如图1所示。

1.1.2 主动侧杆工作原理
本文研究人工操纵模式下,通过主动侧杆系统中的力加载伺服装置为飞行员提供力反馈,从触觉层面增强飞行员的情景感知能力。人工操纵下的主动侧杆工作原理如图2所示。
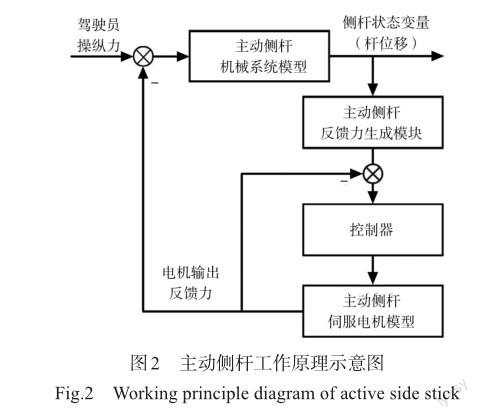
当飞行员操纵驾驶杆时,操纵力将改变侧杆的运动状态,并且飞行员将感受到由侧杆力加载伺服系统提供的反作用力。力加载模型提供期望加载力的大小,通过控制装置实现期望反馈力的精确加载。主动侧杆杆位移传递给飞行控制系统,作为飞机舵面的控制信号。被动侧杆制作完成,其中的弹簧和阻尼器装置将被密封在内部,其弹簧弹性系数和阻尼器阻力系数将不再改变,这种设计导致飞行员感受到的反馈力单一。相比于被动侧杆,主动侧杆采用伺服系统来加载和模拟力,可以通过编程修改与模拟力相关的参数,实现在线修改期望反馈力。
1.2 主动侧杆建模
主动侧杆系统模型由主动侧杆反馈力生成模块、主动侧杆力加载伺服模块、主动侧杆机械系统三部分组成。其中主动侧杆反馈力生成模块决定给飞行员施加的反馈力期望值大小;主动侧杆力加载伺服模块实现期望力的加载,决定给飞行员的触觉反馈;主动侧杆机械系统用于描述侧杆受力后的运动情况。
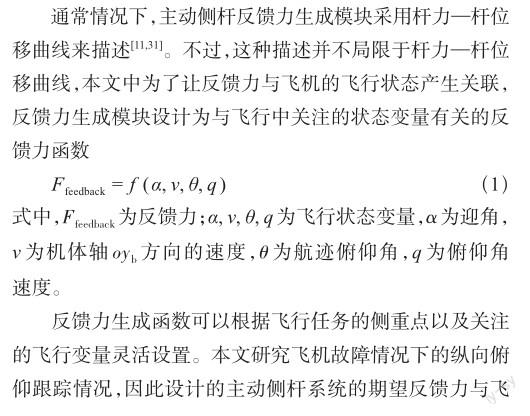
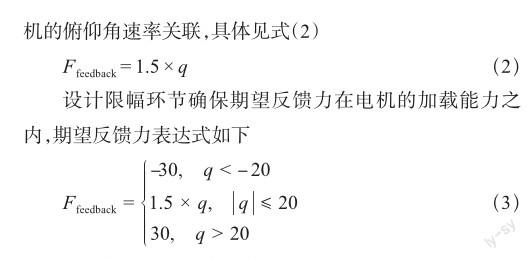
1.2.1 主动侧杆反馈力生成模块
1.2.2 主动侧杆力加载伺服模块
主动侧杆力加载伺服系统通常采用伺服电机,它是一种常见的驱动执行元件,同时也是力反馈设备中的一种。本文采用科尔摩根系列直驱电动机以及配套的驱动器作为加载元件。选取电机转矩控制模式,使用的伺服电机控制方案如图3所示。
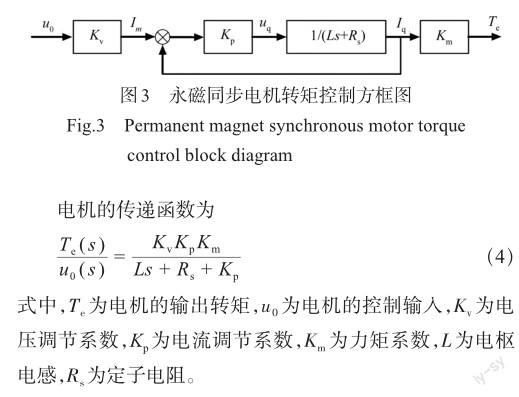
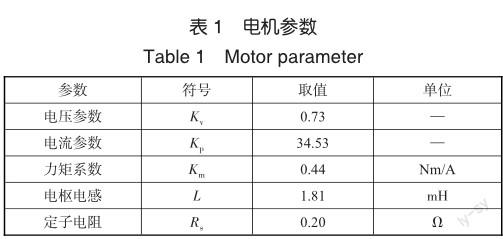
通过查阅资料,电机参數取值见表1。
1.2.3 主动侧杆机械系统模块
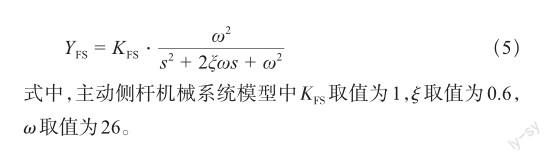
主动侧杆机械系统模型的建立与被动侧杆模型建立过程类似。为了简化主动侧杆系统中的机械传动系统模型,将所有机械部件的转动惯量集中到操纵杆末端连接轴上,将机械传动系统近似成一个等效的二阶环节[32]。当输入为转矩时,系统的输出为主动侧杆的角位移。
2 飞行员自适应控制算法设计
在人机交互系统中,飞行员是核心组成部分之一。飞行员的控制行为十分复杂,需要建立飞行员模型来描述其行为特征。Hess从人体学和生理学研究的角度提出了结构飞行员模型,并提出了简化的结构飞行员模型[31-34]。简化的结构飞行员模型结构如图4所示。
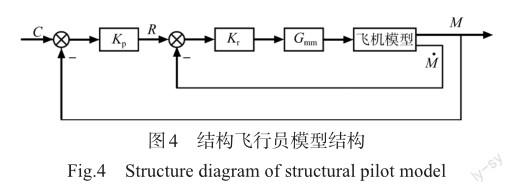
图4中,M与M?表示被控对象的输出值及其导数;C表示期望值,Gnm表示飞行员神经肌肉动力学模型,用于产生控制输入;Kp是输出偏差的增益;Kr是内环反馈的增益。
当飞机出现故障时,飞机的特性会发生不可避免的变化,这些变化会对飞行员的控制行为产生重大影响。为了应对这些情况,Hess在现有飞行员模型的基础上增加了适应被控对象特性变化的自适应逻辑,从而建立了具有自适应性的结构飞行员模型[34-35]。受到Hess提出的时变飞行员模型的启发,本文在已经提出的飞行员模型基础上,增加反映主动侧杆提供情景感知的环节,在飞行员模型内部增加触觉感知环节来感知主动侧杆提供的反馈力,反馈力可以触发飞行员对故障的感知,触发飞行员模型内部的自适应逻辑模块,实现对飞行员模型参数的修正,提出的飞行员结构如图5所示。
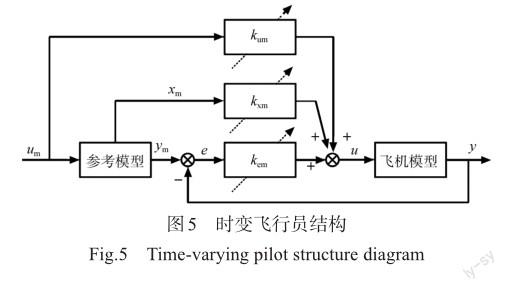
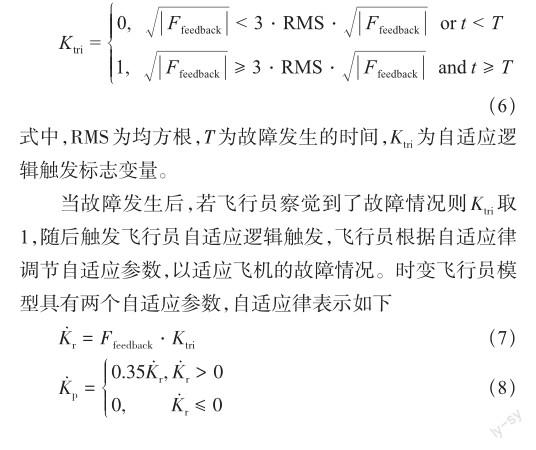
自适应逻辑模块是时变飞行员模型的核心模块,Hess在时变飞行员模型中采用变量R与M?作为自适应逻辑的输入变量,本文提出了将飞行员触觉感知的侧杆反馈力作为自适应逻辑的输入信号,设计自适应逻辑触发算法如式(6)所示
3 控制增稳系统自适应控制算法设计
3.1 自适应控制器设计
自适应控制是一种适应系统模型变化或外界干扰的控制策略,其通过实时改变控制器参数或结构来实现动态适应。模型参考自适应控制是目前主流的自适应控制方法之一,该控制方法中人为构造一个参考模型,以表征期望的闭环系统控制性能。模型参考自适应控制的目标是获得一种动态调整的反馈控制律,以使系统的闭环控制性能与参考模型的性能保持一致。
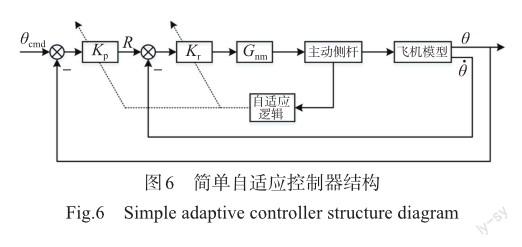
本文选取模型参考自适应控制中的一种控制结构简单的方法——简单自适应控制,用于控制增稳系统的控制器设计。在简单自适应控制中,前馈路径是通过参考模型和估计模型的误差信号计算出的控制信号。反馈回路则用于校正控制信号以适应系统的实际变化。该控制器基本结构如图6所示。

3.2 自适应控制器+PID控制器设计
简单自适应控制更为简便,只需要反馈被控对象的输出信息。此外,简单自适应控制可以采用较低阶的参考模型,从而参数调整所需的数量大大减少。但是,由于自适应增益通常被初始化为零,因此需要一定的时间来调整自适应增益到合理值。在此过程中,瞬态特性可能不令人满意。PID控制方法是目前控制飞机最广泛使用的方法。这主要是因为PID控制需要调整的参数少,易于实现,并且在标称情况下表现出良好的性能和高可靠性。因此本文设计了PID控制器与简单自适应控制结合的控制系统,以改善系统的控制性能。控制器结构如图7所示。
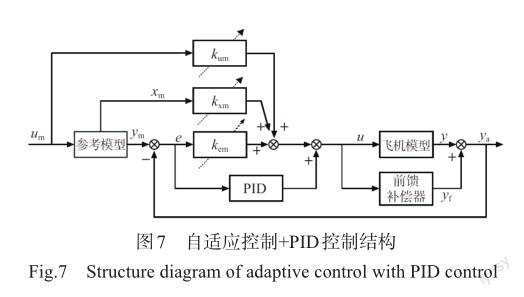
通过控制框图,可以看出简单自适应控制器是基于传统PID控制系统的附加部分。相较于传统PID控制系统,简单自适应PID控制具有高度可扩展性,其中PID部分可以独立于简单自适应控制部分运行,并且可以随时开启和关闭。这种两者结合的控制系统能够实现传统PID控制系统难以独立控制的系统的控制。
4 人机交互控制系统设计
4.1 人机交互系统
人机交互控制系统是现代工业和科技领域中非常重要的研究领域,随着航空业务的不断增加和飞机自动化程度的提高,飞行员和控制增稳系统之间的交互变得至关重要。飞行员通过视觉、触觉、听觉等多种渠道获取飞机状态信息,基于感知信息、情境意识和专业知识执行飞行控制任务,以确保飞行安全;控制增稳系统则通过机载计算机给出控制信号,实现高精度的飞行控制。在故障情况下,飞行员的故障识别能力更强,而控制增稳系统的控制精度更高。因此,将两者优点结合起来,设计一种飞行员和控制增稳系统共同参与的飞行控制系统,对于提升飞行品质至关重要。
飞机驾驶舱内的人机交互可以分为切换控制模式和共享控制模式。其中,切换控制模式是指飞行员和控制增稳系统在不同的时间轮流执行驾驶任务的交互方式,这种控制模式在控制权转换过程中,很难确保飞行员处于良好的工作状态[16]。共享控制模式是一种飞行员和控制增稳系统协同控制的方式,旨在充分利用双方的优势,提高控制效率[36]。本文选取共享控制模式实现人机交互控制过程。
4.2 并联型人机交互控制系统设计
4.2.1 并联型人机交互控制架构
针对故障情况下的人机交互控制问题,本文提出并联型人机交互控制架构,如图8所示。在该并联型人机交互控制架构中,飞机在故障发生之前由飞行员单独操纵。飞行员根据飞行任务和实际飞行状态的偏差操纵飞机,将操纵力输出给主动侧杆。主动侧杆不仅产生运动,还向飞行员提供与飞行状态相关的反馈力,从而增强飞行员的情景感知。同时,杆指令作为飞控系统的输入,产生控制信号,控制飞机完成飞行状态的变化。
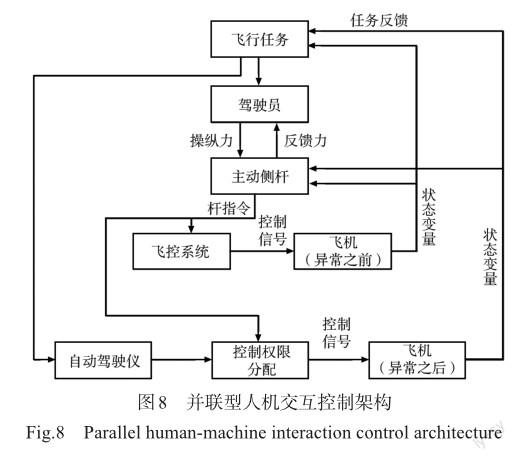
当故障发生时,飞行员和控制增稳系统共同操纵飞机。由于飞机发生故障,主动侧杆提供的反饋力触发时变飞行员的自适应逻辑环节,时变飞行员产生操纵力控制主动侧杆产生位移。侧杆位移作为杆指令传送到控制权限分配逻辑单元。同时,控制增稳系统根据控制任务,在飞机故障之后产生控制信号并传送到控制权限分配逻辑单元。该控制架构中,飞行员发挥了其擅长推理决策的特点,根据主动侧杆的反馈力触发故障识别。当识别故障之后,将控制增稳系统引入控制系统中,飞行员和控制增稳系统同时具有对飞机的控制权。
4.2.2 人机交互控制权限分配
飞机发生故障之后,控制权限分配逻辑单元根据控制任务的优先级分配飞行员和控制增稳系统的控制权限大小,对两者的控制信号进行合成,最终输出控制信号作用于发生故障的飞机模型。
在并联型人机交互控制架构中,飞行员与控制增稳系统控制权限的分配是实现高效人机交互控制的核心问题。因此,本节将深入研究飞行员与控制增稳系统控制信号的合成方式。具体而言,飞行员操纵产生的控制信号和控制增稳系统产生的控制信号将通过控制权限分配单元合成总的控制信号,用来控制飞机完成所需的飞行状态变化。控制信号的合成方法如式(18)所示
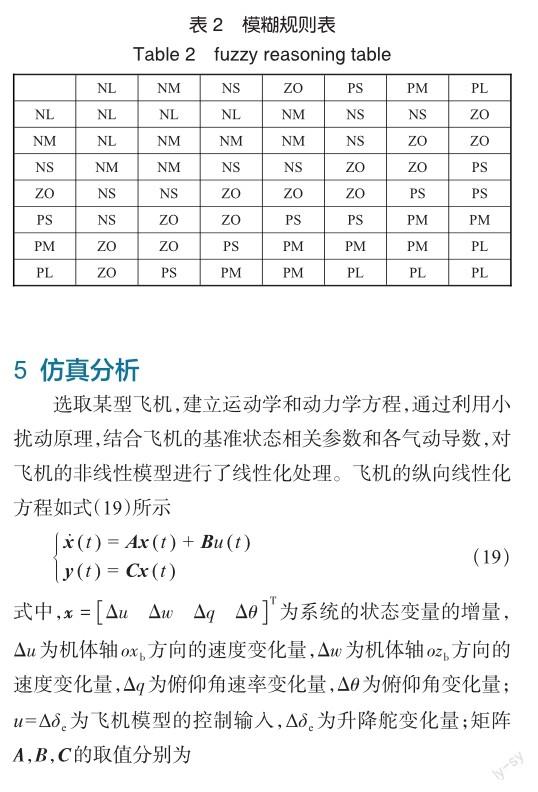
模糊控制是一种结合模糊数学和控制理论的控制方法,已成为智能控制领域中的重要分支。跟踪偏差、跟踪偏差导数以及控制权限分配因子的模糊变量子集包括负大、负中、负小、零、正小、正中、正大7个状态,分别用NL、NM、NS、ZO、PS、PM、PL表示。根据专家经验或现场操作人员的经验知识及操作数据,本文采用模糊控制规则计算控制权限分配因子,设计模糊规则见表2。

在15s之后引入飞机执行器故障,飞机升降舵效率损失25%。故障发生之前由飞行员独自操纵飞机,故障发生之后引入控制增稳系统,构成并联交互控制系统。
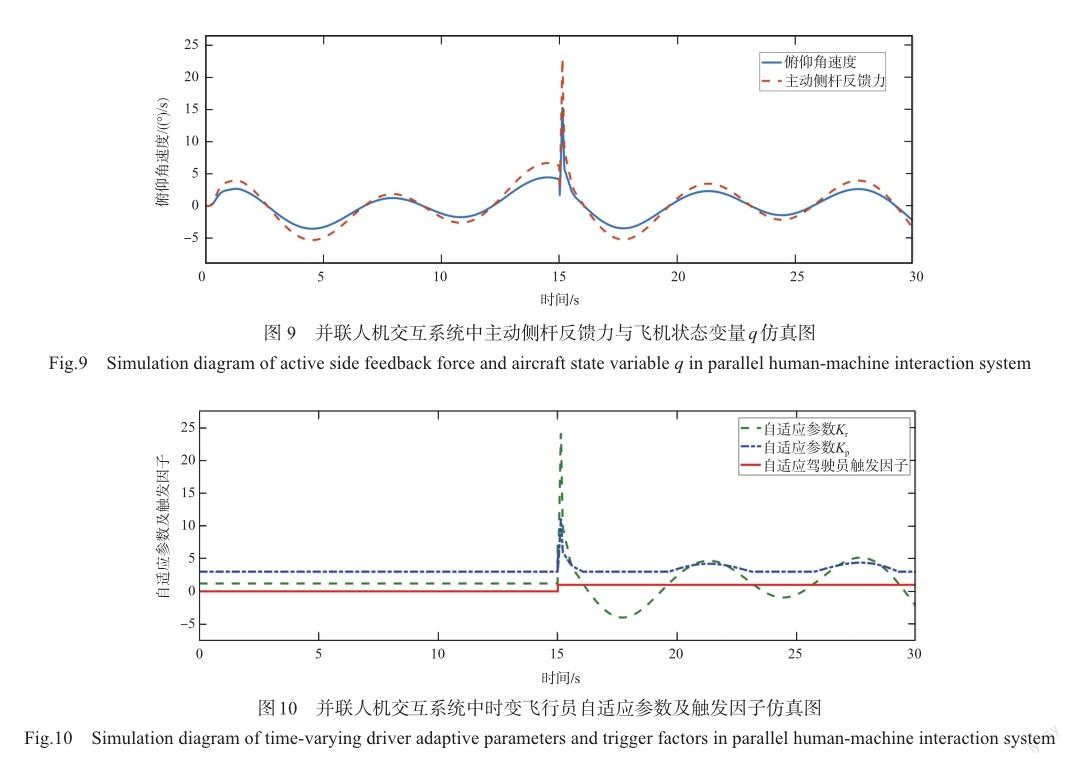
飞机发生故障之后,飞行员的自适应控制算法是通过主动侧杆的故障触觉反馈力触发的。本文的飞行任务为俯仰角跟踪,故设计主动侧杆的反馈力跟飞机俯仰角速度相关,主动侧杆反馈力变化情况如图9所示。可以看出主动侧杆反馈力与飞机的状态变量q相关,且两者变化趋势一致,其中在第15s故障发生之后,俯仰角速度达到了最大值15(°)/s。
飞行员在整个飞行任务过程中都参与控制,仿真结果如图10所示。故障发生之前,飞行员自适应参数保持初始值。当飞行员感知到飞机故障之后,自适应触发因子由0变化到1;自适应参数Kr迅速增加到最大值24,然后逐渐减小,在跟踪过程中波动范围在-5~5之间;自适应参数Kp在飞行员意识到故障后也迅速增加到13,然后逐渐减小,在初始值处波动。
整个交互过程中,控制增稳系统控制作用的引入,以及飞行员与控制增稳系统的控制权限分配是通过模糊控制器生成的控制权限分配因子进行调节的,根据模糊控制规则,在Matlab中设计模糊控制器和跟踪偏差、跟踪偏差的导数以及控制权限分配因子λ的关系如图11所示。

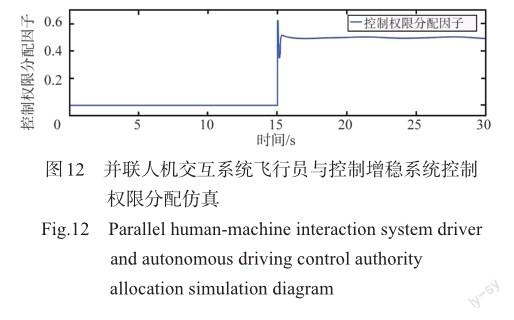
并联人机交互系统中飞行员与控制增稳系统的控制权限分配因子λ的仿真结果如图12所示。在故障发生前的15s内,控制权限分配因子为0,这表明此时控制增稳系统没有参与控制任务,飞行员完全掌控飞机的控制;但是,当故障发生时,飞行员无法独立完成跟踪任务,此时模糊控制器生成的权限分配因子迅速上升,表明控制增稳系统的控制权限迅速增大,λ在0.25s后达到最大值0.67,此时飞行员控制权限为0.33。随后,控制权限分配因子逐渐减少,并趋向于0.5,这说明当控制系统克服故障带来的不良跟踪效果后,控制增稳系统和飞行员的控制权限逐渐趋于平衡。
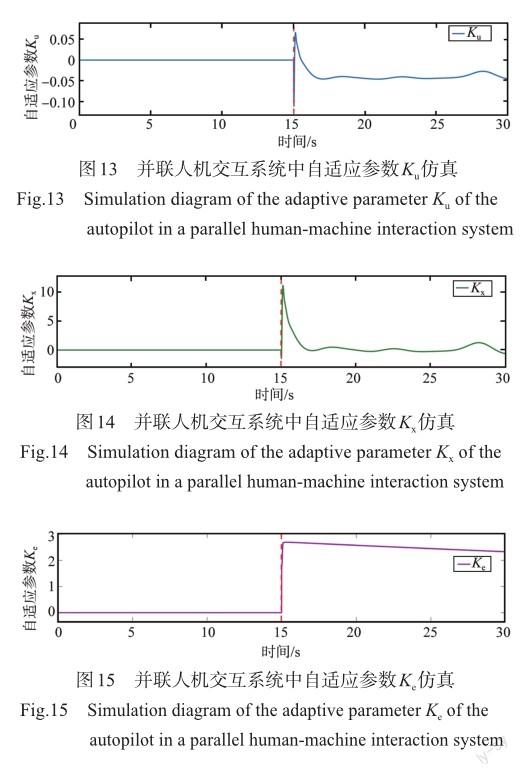
控制增稳系统采用自适应控制器+PID控制器,在控制过程中,控制增稳系统不断调整自适应参数,以实现对期望信号的跟踪,控制增稳系统的自适应参数的变化情况如图13~图15所示。由图13~图15可以看出,在飞机升降舵故障之前自适应控制器的参数Ku,Kx,Ke均为零,表明控制增稳系统没有参与控制过程,即飞行员全权控制无故障的飞机;在故障发生后,自适应参数Ku迅速增大至0.05,然后又迅速下降,并在17.4s时达到-0.05,随后保持在该值周围轻微波动;自适应参数Kx在异常发生之后的15.2s时增大至11.14,然后在16.76s下降至0,随后在[-0.6,1.5]区间内波动;自适应参数Ke在15.3s时增大至最大值2.67,然后缓慢下降,在30s时下降至2.32。这些参数的变化反映了控制增稳系统的自适应能力,同时也展示了控制增稳系统在飞机故障后的响应和调整过程。
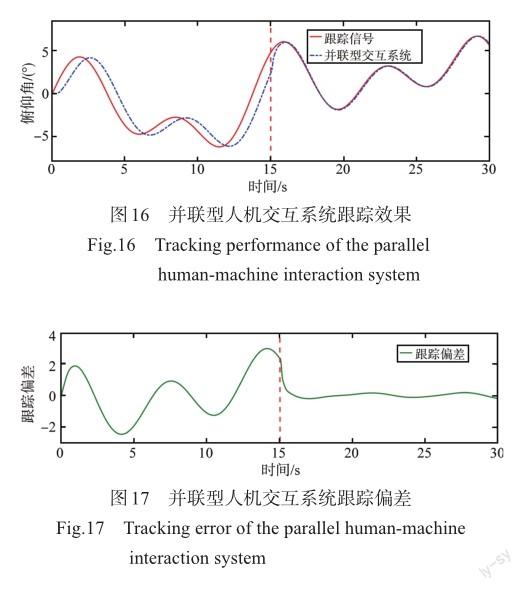
整个并联人机交互控制系统的跟踪效果及跟踪偏差如图16、图17所示。可以看出,在15s之前飞机无故障发生,飞行员可以跟踪俯仰角指令,在跟踪过程中存在偏差,且偏差范围为±2°,在容许范围之内;当15s故障发生之后引入控制增稳系统控制,在飞行员与控制增稳系统的协同交互控制之下实现了俯仰角跟踪,跟踪偏差在[-0.5, 0.5]之间,跟踪偏差更小。通过仿真可以得出设计的并联型人机交互控制可以在故障发生之后实现期望指令的跟踪,且跟踪效果良好。
6 结论
本文研究了飞机故障情况下的人机交互系统设计和实现,设计了飞行员与控制增稳系统之间的并联型人机交互控制架构,旨在提高故障情况下的任务跟踪性能。设计了反馈力与飞机俯仰角速率相关的主动侧杆伺服系统,以通过触觉反馈向飞行员传递飞行状态;设计了时变自适应飞行员控制系统,以描述飛行员感知到飞机故障后的人工操纵过程;设计了自适应控制增稳系统控制系统,以协助飞行员完成飞机故障情况下的控制任务;设计了模糊控制器对故障发生之后的飞行员与控制增稳系统的控制权重进行灵活而有效的分配。最后通过仿真得出,该并联人机交互系统能够实现飞机故障情况下的飞行控制任务,且跟踪效果良好。
参考文献
[1]吴佳驹, 苏幸君, 朱妍. 驾驶员辅助系统的研究现状和发展展望[J]. 航空科学技术, 2021, 32(7): 12-20.Wu Jiaju, Su Xingjun, Zhu Yan. Research status and develop‐ment prospect of pilot assistance system[J]. Aeronautical Sci‐ence & Technology, 2021, 32(7): 12-20. (in Chinese)
[2]学喆, 张岳, 陈军. 无人-有人机混合主动式交互决策研究[J]. 航空科学技术, 2022, 33(5):44-52. Xue Zhe, Zhang Yue, Chen Jun. Research on UAV-MAV mixed-initiative interactive decision[J]. Aeronautical Science& Technology, 2022, 33(5):44-52. (in Chinese)
[3]史国荣, 李凯, 郭韶华. 浅析飞机侧杆驾驶装置设计[J]. 电子世界, 2021(15): 180-181. Shi Guorong, Li Kai, Guo Shaohua. A brief analysis on the design of aircraft side stick control device[J]. Electronics World, 2021(15): 180-181. (in Chinese)
[4]Hanke D, Herbst C. Active sidestick technology-a means for improving situational awareness[J]. Aerospace Science and Technology, 1999, 3(8): 525-532.
[5]Hosman R, Benard B, Fourquet H. Active and passive side stick controllers in manual aircraft control[C]. IEEE International Conference on Systems, Man, and Cybernetics Conference, 1990: 527-529.
[6]Guiatni M, Ournid A, Boulahlib M A, et al. Programmable force-feedback side-stick for flight simulation[C]. IEEE International Instrumentation and Measurement Technology Conference, 2012: 2526-2530.
[7]Fergani S, Allias J F, Briere Y, et al. A novel structure design and control strategy for an aircraft active sidestick[C]. 24th Mediterranean Conference on Control and Automation (MED), 2016: 1114-1119.
[8]Hegg J W, Smith M P, Yount L, et al. Features of active sidestick controllers[J]. IEEE Aerospace and Electronic Systems Magazine, 1995, 10(7): 31-34.
[9]许舒婷, 谭文倩, 孙立国, 等. 主动侧杆引导下的Ⅱ型飞行员诱发振荡抑制[J]. 航空学报, 2018, 39(8): 1-12. Xu Shuting, Tan Wenqian, Sun Liguo, et al. Using active sidestick to prevent category Ⅱ pilot-induced oscillations[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(8): 1-12. (in Chinese)
[10]Abildgaard M, Grünhagen W. Demonstration of an active sidestick in the DLR flying helicopter simulator (FHS) [C]// Proceedings of the 34th European Rotorcraft Forum, UK, 2008.
[11]孫无忌. 侧杆感觉控制系统及人机闭环模型研究[D]. 西安:西北工业大学, 2017. Sun Wuji. Research on side stick haptic control system and Hu‐man-in-the-Loop model[D].Xi’ an: Northwestern Poly- techni‐cal University, 2017. (in Chinese)
[12]刘世前, 卢正人, 梁青祥龙, 等. 基于主动侧杆技术的人在回路系统建模与多模态引导控制[C]. IEEE CGNCC 2016,2016:2971-2974. Liu Shiqian, Lu Zhengren, Liang Qingxianglong, et al. Modeling of human-in-the-loop system and multi-modal guidance control based on active sidestick technology[C]. 2016 IEEE Chinese Guidance, Navigation and Control Conference, 2016: 2971-2974. (in Chinese)
[13]Zhou G R, Liu S Q, Sang Y J. LPV robust servo control of aircraft active side sticks[J]. Aircraft Engineering and Aerospace Technology, 2020, 92(4): 599-609.
[14]Klyde D, Chi Y L, Richards N. Use of active inceptor cueing to mitigate pilot-vehicle system loss of control[C]. AIAA Guid‐ance, Navigation, And Control Conference, 2012: 4765-4768.
[15]ünal Z. Simulator based evaluation of adaptive envelope protection algorithms for active sidestick controllers[D]. Ankara: Middle East Technical University, 2019.
[16]董玮, 李岩, 董骐, 等. 自动驾驶人机交互系统研究综述[J].汽车电器, 2022(10): 1-6. Dong Wei, Li Yan, Dong Qi, et al. A review of research on automated driving human-machine interaction systems[J]. Automotive Electrician, 2022(10): 1-6. (in Chinese)
[17]于宁波, 李思宜, 赵营泉, 等. 基于共享控制的人机灵巧力触觉交互系统设计与实现[J]. 仪器仪表学报, 2017, 38(3): 602-611. Yu Ningbo, Li Siyi, Zhao Yingquan, et al. Design and implementation of a human -machine dexterous force-tactile interaction system based on shared control[J]. Journal of Instrumentation and Measurement, 2017, 38(3): 602-611. (in Chinese)
[18]冯悦, 王言伟, 耿欢. 战斗机智能座舱人机交互方式发展及应用[J]. 飞机设计, 2020, 40(4): 54-58. Feng Yue, Wang Yanwei, Geng Huan. Development and application of human -machine interaction methods in intelligent cockpits of fighter aircraft [J]. Aircraft Design,2020, 40(4): 54-58. (in Chinese)
[19]Cahill J, Donald N M. Human computer interaction methods for electronic flight bag envisionment and design[J]. Cognition Technology & Work, 2006, 8(2): 113-123.
[20]Andre A D, Wickens C D, Moorman L. Display formatting techniques for improving situation awareness in the aircraft cockpit[J]. The International Journal of Aviation Psychology, 1991, 1(3): 205-218.
[21]Ramasamy S, Sabatini R, Gardi A, et al. Next generation flight management system for real-time trajectory based operations[J]. Applied Mechanics and Materials, 2014,629: 344-349.
[22]孫童, 曲蕾, 赖鸣. 人机交互技术在美国海军的典型应用[J].舰船科学技术, 2022, 44(15): 185-189. Sun Tong, Qu Lei, Lai Ming. Typical applications of humanmachine-interaction technology in the US navy[J]. Ship Science and Technology, 2022, 44(15): 185-189. (in Chinese)
[23]康卫勇, 袁修干, 柳忠起. 基于脑力负荷飞机座舱视觉显示界面优化设计[J]. 北京航空航天大学学报, 2008, 34(7): 782-785. Kang Weiyong, Yuan Xiugan, Liu Zhongqi. Optimization design of aircraft cockpit visual display interface based on mental workload[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(7): 782-785. (in Chinese)
[24]郭小朝, 刘宝善, 马雪松, 等. 歼击机座舱通用显示信息及其优先级的确定[J]. 中华航空航天医学杂志, 2006, 17(4): 260-263. Guo Xiaochao, Liu Baoshan, Ma Xuesong, et al. Determina‐tion of general dsplay information and priority in fighter cock‐pit[J]. Chinese Journal of Aerospace Medicine, 2006, 17(4): 260-263. (in Chinese)
[25]徐海玉, 张安, 汤志荔, 等. 飞机驾驶舱人机界面综合评估[J].科学技术与工程, 2012, 12(4): 940-944. Xu Haiyu, Zhang An, Tang Zhili, et al. Comprehensive evalua‐tion of human-machine -interface in aircraft cockpit[J]. Science Technology and Engineering, 2012,12(4): 940-944. (in Chinese)
[26]Scott J, Gray R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving[J]. Human Factors, 2008, 50(2): 264-275.
[27]Pacaux L, Flemisch F. Layers of shared and cooperative con‐trol, assistance, and automation[J]. Cognition, Technology & Work, 2019, 21(4): 579-591.
[28]许舒婷, 谭文倩, 屈香菊. 飞机力提示智能侧杆控制器设计方法[J]. 航空学报, 2021, 42(8): 286-299. Xu Shuting, Tan Wenqian, Qu Xiangju. Design method of aircraft smart side-stick controller with force cue[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 286-299. (in Chinese)
[29]Flad M, Otten J, Schwab S, et al. Necessary and sufficient conditions for the design of cooperative shared control[C]. International Conference on Systems, Man, and Cybernetics(SMC), 2014: 1253-1259.
[30]陈勇,张新慧,耿延升,等.飞机飞控系统指令异构力传感器技术研究[J].航空科学技术,2023,34(4): 55-60. Chen Yong, Zhang Xinhui, Geng Yansheng, et al. Research on command heterogeneous force sensor technology for aircraft flight control system[J]. Aeronautical Science & Technology, 2023,34(4): 55-60. (in Chinese)
[31]郑培文. 电动操纵负荷系统建模仿真与控制技术研究[D]. 太原: 中北大学, 2019. Zheng Peiwen. Research on modeling simulation and control technology of electric control loading system[D]. Taiyuan: North University of China, 2019. (in Chinese)
[32]Hess R A. Unified theory for aircraft handling qualities and ad‐verse aircraft-pilot coupling[J]. Journal of Guidance, Control, and Dynamics, 1997, 20(6): 1141-1141.
[33]Hess R A. Modeling pilot control behavior with sudden changes in vehicle dynamics[J]. Journal of Aircraft, 2009, 46(5): 1584-1592.
[34]Hess R A. A model for pilot control behavior in analyzing potential loss-of-control events[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 228(10): 1845-1856.
[35]Hess R A. Modeling human pilot adaptation to flight control anomalies and changing task demands[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(3): 655-666.
[36]Eraslan E, Yildiz Y, Annaswamy A M. Shared control between pilots and autopilots: an illustration of a cyberphysical human system[J]. IEEE Control Systems Magazine, 2020, 40(6): 77-97.
Study on the Human-machine Interaction Control System of Aircraft Equipped with Active Side Stick
Meng Xiaobao1, Zou Quan2, He Huanhuan1, Fan Xue1, Xie Rong1
1. Northwestern Polytechnical University, Xi’an 710072, China
2. Chinese Flight Test Establishment, Xi’an 710089, China
Abstract: The human-machine ineraction control of active side stick, as an important and widely used technology, not only can reduce the workload of pilots, but also improve the aircraft performances and safety. To address the issue of potential loss of aircraft control in the event of failure of aircraft actuators, a parallel human-machine interaction control architecture was developed for aircraft with an active side stick. A novel interaction approach was designed for the active side stick to not only transmit control commands, but also provide tactile feedback to the pilot regarding the flight status, enabling rapid perception of aircraft failures and appropriate actions. Simultaneously, an autopilot control system was designed with an adaptive controller, and an improved adaptive controller with PID controller was developed based on this foundation. A fuzzy control mechanism was employed to dynamically allocate the humanmachine control weights, providing a more flexible and precise control method for interaction between the aircraft system and pilots. Finally, the effectiveness of the designed human-machine interaction control method with the active side stick was verified through simulation.
Key Words: active side stick; aircraft actuator failure; adaptive control; fuzzy control; human-machine interaction system
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22