
Intruder trajectory tracking in a three-dimensional vibration-driven granular system: Unveiling the mechanism of the Brazil nut effect
2023-11-02 08:11TuoLi李拓KeCheng程可ZhengPeng彭政HuiYang杨晖andMeiyingHou厚美瑛
Chinese Physics B 2023年10期
Tuo Li(李拓), Ke Cheng(程可), Zheng Peng(彭政), Hui Yang(杨晖), and Meiying Hou(厚美瑛),†
1School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China
2Soft Matter Laboratory,Institute of Physics,Chinese Academy of Sciences,Beijing 100190,China
3School of Physics,Central South University,Changsha 410012,China
4College of Medical Instrumentation,Shanghai University of Medicine&Health Sciences,Shanghai 201318,China
Keywords: granular matter,segregation,Brazil nut effect,vibro-fluidization
1.Introduction
In various industrial processes[1]and natural phenomena,[2,3]particle segregation occurs when different shapes or sizes of particles are subjected to external vibrations or disturbances.Understanding and controlling this phenomenon are of significant importance in industries such as pharmaceuticals,where achieving a homogeneous distribution of components in powders is crucial, as well as in geological disasters such as earthquakes and landslides.The Brazil nut effect describes the phenomenon of particle segregation,which depends not only on the particle size[4-6]but also on physical properties such as shape,[7-9]density,[10,11]restitution coefficient,[12]and friction coefficient.[13,14]
Granular systems provide valuable insights into nonequilibrium phenomena and are extensively studied in fundamental physics research.[15-17]Experimental investigations of granular segregation face challenges, particularly in three-dimensional systems.Traditional high-speed imaging techniques[18,19]are limited to two-dimensional systems,while other three-dimensional imaging methods such as x-ray computed tomography[20,21]and nuclear magnetic resonance imaging[22,23]are impractical due to their limitations in terms of bulkiness, time-consuming nature, and high cost.Consequently,most experimental studies have been confined to twodimensional systems until recently.
The complexity of granular segregation arises from the interplay of diverse influencing factors, including particle size,density,interaction between interstitial fluid and particles,and friction between particles and container walls.[4,24,25]Various segregation mechanisms, such as convection,[26,27]voidfilling,[28]buoyancy,[29,30]inertia,[31]and cohesion,[10,13]have been identified, each inducing gradients in different ways.[32,33]Given the complexity, physicists have attempted to simplify the problem by studying the motion of a single large particle embedded in a granular bed[34,35]to infer the mechanisms underlying the bulk particle segregation.
In this paper,we present a novel 3D particle tracking technique, the Hall-effect magnetic sensing technique, for highprecision trajectory tracking of a single magnetic sphere with varying densities within a granular bed.By focusing on a single large sphere as an intruder model system, we eliminate the influence of long-range interactions among multiple large particles.Through systematic manipulation of vibration parameters,we gain microscopic insights into the motion of the intruder within the granular bed.
Specifically, we investigate the correlation between the equilibrium position of the intruder and the vibration acceleration, as well as its density.Our analysis reveals that the primary mechanism driving the upward motion of the intruder is the void-filling mechanism,where bed particles displace to occupy void spaces left by the up-motion of the sphere.Additionally,we examine the contribution of convection and find that the intruder also exhibits upward motion near the container wall,suggesting a limited role of convection in the observed phenomena.
2.Experimental method
Figure 1 illustrates the schematic diagram of our experimental setup.The sample cell employed is a cylindrical container made of organic glass, with dimensions of 80 mm in diameter and 70 mm in height.The container is filled with spherical glass beads, ranging in diameter from 0.6 mm to 0.8 mm, and possessing a friction coefficient of 0.50.The glass beads are filled to a height of 50 mm within the container.An intruder,in the form of a magnetic sphere with a diameter of 10 mm,is embedded within the bed of glass beads.The magnetic sphere consists of a magnet encased in materials with different densities.Specifically, we employ three types of magnetic spheres,referred to as titanium,copper,and tungsten balls, with respective densities ofρ=5.372 g/cm3,ρ=8.053 g/cm3,andρ=14.450 g/cm3.

Fig.1.Schematic diagram of the experimental setup.
The sample cell is mounted on an electromagnetic shaker that provides vertical vibrations.The shaker’s vibration amplitude and frequency are denoted asAandω(= 2π f),respectively.The vibration displacement is represented byAsin(2π ft), and the dimensionless vibration acceleration is expressed asΓ=Aω2/g(wheregdenotes the gravitational acceleration).The shaker’s acceleration is measured using an accelerometer fixed to the shaker.Throughout the experiment,the vibration parameters are adjusted by varyingωandΓ.Observations of the granular bed’s vibration state are made using a high-speed camera positioned on top(and from the side)of the cell.The movement of the intruder inside the granular bed is measured using a Hall-sensor array placed on one side of the container.
To mitigate static electricity generated by particleparticle collisions and the collisions between particles and the container walls, a metallic aluminum alloy is chosen for the bottom of the container.Additionally,to ensure the even distribution of the granular bed,the cell is pre-shaken for 10 s.The 10 mm magnetic sphere, referred to as the intruder, is placed initially either on the surface or at the bottom of the bed.We establish the reference point for vertical position asz=0 when the intruder is at the surface, andz=-4.5 cm when it is located at the bottom of the container.The intrusion coordinates(x,y,z)of the magnetic sphere can be derived from the electric signals obtained through the Hall sensor array.
Tracking particles in a three-dimensional granular bed poses significant challenges,especially when the experimental conditions impose constraints on the sensor size, power, and flexibility.To overcome this challenge, we employed a Halleffect magnetic sensor array to reconstruct the trajectories of a magnetic sphere inside a vibro-fluidized three-dimensional granular bed.The sensor array, positioned on one side of the container, is placed at a distance more than 2.5 times the sphere’s magnet size,allowing us to treat the sphere as a magnetic dipole.We can then express thezcomponent of the magnetic induction intensityBof each sensor as a function of the position coordinates(x,y,z)and angles(θ,φ)of the sphere.To determine the position coordinates(x,y,z)and angles(θ,φ) of the sphere, we utilize the Levenberg-Marquardt fitting method to invert the 105 over-determined equations of data collected by the array consisting of 105 Melexis MLX90393 3D magnetic sensors.These sensors,spaced 1 cm apart,possess a magnetic resolution of 0.15µT in thexandyaxes,and 0.25 µT in thezaxis.Additionally, they exhibit a sensitivity of 3.22 µT/LSB(LSB: least significant bit) in thexandyaxes,and 5.87µT/LSB in thezaxis.Operating at a rate of 30 frames per second, the sensor array dynamically captures the magnetic field measurements.This enables real-time tracking of the magnetic sphere’s motion trajectory within the granular bed, as well as the acquisition of its rotation angle during its motion.
The flow condition of bed particles can be effectively assessed by utilizing two high-speed cameras strategically positioned on the side and top of the sample container.By meticulously tracking the movement of a small quantity of black tracer glass beads along both the top and side wall surfaces,a comprehensive analysis of particle dynamics can be conducted.
3.Experimental results and discussion
In our experimental setup,we placed a magnetic sphere at the center of the container’s bottom.By analyzing the detected magnetic field intensity,we could precisely determine the position of this intruder.Figure 2 illustrates the temporal variations in both vertical(Z-direction)and horizontal(R-direction)displacements of the intruder, at the vibration parameters ofΓ=2 andf=25 Hz.
Figure 2(a) shows the variations in the vertical and horizontal displacements of the intruder over time.It provides insights into the intruder’s motion as it responds to the applied vibrations.The graph reveals that the intruder experiences an upward displacement in theZ-direction, indicating its ascent from the bottom of the container towards the surface of the granular bed.Simultaneously, theR-direction displacement shows a movement towards the sidewall.

Fig.2.The intruder is initially placed at the center of the container bottom.The vibration parameters used in the experiment are Γ =2.5 and f =25 Hz.(a) Upper graph: horizontal displacement of the intruder over time.Lower graph: vertical displacement of the intruder over time.(b) 3D trajectory plot illustrating the path followed by the intruder throughout the experiment.
Figure 2(b)presents the trajectory of the magnetic sphere,visually depicting its upward motion from the bottom of the container to the surface of the granular bed.As it reaches the surface,it proceeds along the surface towards the sidewall,ultimately reaching it.This trajectory provides further evidence of the intruder’s ascent and lateral movement within the granular bed.
These observations demonstrate that the applied vibrations cause the magnetic sphere to rise from the bottom towards the surface, and subsequently, it follows a trajectory along the surface towards the sidewall.This behavior is consistent with the upward motion of the intruder associated with the Brazil nut effect.
As demonstrated in Fig.3, for vibration conditions withΓ=2,the equilibrium positions of the intruder are at the surface of the granular bed(Fig.3(a)).Conversely, under vibration conditions withΓ=3, regardless of the initial position(top or bottom of the bed),the intruder eventually settles at an equilibrium position below the surface(Fig.3(b)).By comparing the slopes of the upward curves in Figs.3(a) and 3(b), it becomes evident that higher vibration acceleration(Γ)leads to faster upward velocity.This dynamic process of force balance within a 3D granular bed is difficult to observe otherwise.

Fig.3.(a)An intruder(ρ =5.372 g/cm3)moves upward to the surface of the bed from the bottom center of the container at Γ =2 with different vibration frequencies.(b) The intruder (ρ =5.372 g/cm3) reaches the same equilibrium position no matter from the surface center or bottom center of the container at Γ =3 with different vibration frequencies.
To delve deeper, figure 4 presents a further investigation into the equilibrium position of the intruder with varying densities at different vibration acceleration and frequency values.WhenΓis less than 2.5,the final equilibrium position is at the surface of the bed.However,asΓexceeds 2.5,the equilibrium height of the intruder decreases asΓincreases.Additionally,comparing Fig.4(a) to Fig.4(c), it is apparent that a higher density of the intruder results in a lower equilibrium position.
In Fig.3, the upward velocity of the intruder is influenced by the vibration acceleration and frequency, while the downward velocity is independent of the vibration parameters and occurs almost instantaneously compared to the upward velocity.This suggests that the granular bed above and below the equilibrium positionH0represent different mechanical states:the granular bed aboveH0provides insufficient support to counteract the gravitational force on the intruder that the sphere quickly sinks similar to a liquid phase.However,once the intruder reaches force balance atH0,the bed belowH0exhibits a more solid-like behavior, allowing the intruder to be supported to move upward with velocity dependent on the vibration strength.
For a fully fluidized particle bed, the intruder may experience a volume-related buoyancy force similar to a liquid.[30]For a sufficiently light intruder,it may move upward under the effect of“buoyancy,”resulting in the Brazil-nut effect(BNE).However, it is worth noting that in this study, the vibration strength is not sufficient for the particle bed to be fully fluidized.The upward movement of the intruder (BNE) in this study occurs in the solid-like region.Therefore, the BNE effect studied in this paper is not related to“buoyancy”.On the other hand, in the liquid-like region, due to the high density of the intruder in this study, the “buoyancy” is not sufficient to support gravity, causing the intruder to rapidly sink to the liquid-solid interface.
To investigate the upward motion mechanism of the large sphere,known as Brazil nut effect,we plot the upward velocity of the large sphere against the vibration velocityΓ/ωin Fig.5.It is found that the upward velocities measured under differentΓandωcollapse well withΓ/ω.The upward velocity increases with increasing vibration velocity,and comparing the results in Figs.5(a)-5(c),it is observed that the larger the density of the intruder,the slower the upward velocity.
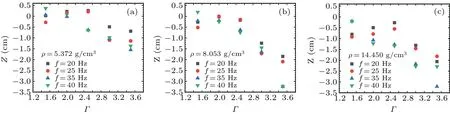
Fig.4.Variation of equilibrium position of the intrusion particle in the Z-direction under different vibration frequencies.(a)ρ =5.372g/cm3.(b)ρ =8053 g/cm3.(c)ρ =14450 g/cm3.

Fig.5.Variation of the upward velocity of the intrusion particle from the bottom center of the container with vibration velocity under different vibration frequencies.(a)ρ=5.372 g/cm3.(b)ρ=8053 g/cm3.(c)ρ=14450 g/cm3.A straight line is drawn in the figures to guide the eyes.
For the liquid-like region, the sinking of the large ball is almost instantaneous and unaffected by the vibration intensity and frequency.In previous work,[30]it is found that once the particle bed is fluidized through vibration (reaching a certain threshold of vibration strength), further increasing the vibration strength does not change the lift force on the intruder.This finding is consistent with our experimental observations in the liquid-like region.For the solid-like region, the upward velocity of the large sphere is related to the vibration amplitude and frequency.For a fixed frequency,the upward velocity increases with increasing vibration accelerationΓ.According to our previous analysis, in the solid-like region, the upward motion of the large sphere is due to the“void filling effect”of the small particles below the sphere.Therefore,it is apparent that the vibration amplitudeAof the bed, which determines the size of the“void”created below the large ball due to inertia,is proportional to the upward velocity.Additionally,since the frequencyfdetermines the number of vibrations occurring per unit time and each vibration creates a “void” below the large sphere,[36]for a fixedA, the upward velocity of the sphere should be proportional to the frequencyf.Therefore,overall, the upward velocity is proportional to the vibration velocityv=Aω(=Γ g/ω)(Fig.5).
The convection of the bed particles can be observed from the top and side cameras.The particles move from the center bottom to the surface and then descend near the sidewall back to the bottom, forming a convection loop.Figure 6 demonstrates the measurement of the convective velocity(vc)of the bed particles by tracking the downward motion of the black tracer particles along the sidewall.It is observed that the convective velocity increases as the vibration velocity is augmented.However,it is important to note that near the sidewall,the convective motion of the bed particles is opposite to that of the intruder.
The presence of bed particle convection obviously affects the motion of the intruder.Previous studies have identified convection as one of the mechanisms responsible for the Brazil nut effect,[23,24]where a large ball positioned at the center bottom of the particle bed is pushed to the surface along with the bed particle convection.[37]Upon reaching the surface,the large ball follows the convection loop towards the sidewall.However, due to its size, the large ball cannot descend with the bed convection near the sidewall and remains on the surface.To investigate its motion, we placed the intruder at the bottom of the particle bed near the sidewall.It is found that the large ball still moves upward but follows a curved trajectory influenced by the convection loop,as shown in Fig.7.As the parameterΓincreases, the upward speed of the large sphere increases,and the curvature decreases.In Fig.8,we compare the upward velocities of the sphere from the center and sidewall positions and find that for smallerΓvalues, the upward velocity near the sidewall is slightly slower than that at the center.However,asΓincreases,the upward velocity near the sidewall matches the upward velocity from the bottom center.This suggests that, under the experimental conditions of this study, the primary reason for the upward motion of the large sphere is not convection but rather the“void filling effect”of the particle bed in the solid-like region, while the convection of the particle bed only exerts a minor influence on the upward velocity.

Fig.6.Variation trend of bed particle convection velocity(vc)with vibration acceleration (Γ) for a bed thickness of H =50 mm, particle diameter of d =0.6-0.8 mm, and vibration frequencies of f =25 Hz and f =35 Hz.A straight line is drawn in the figure to guide the eyes.
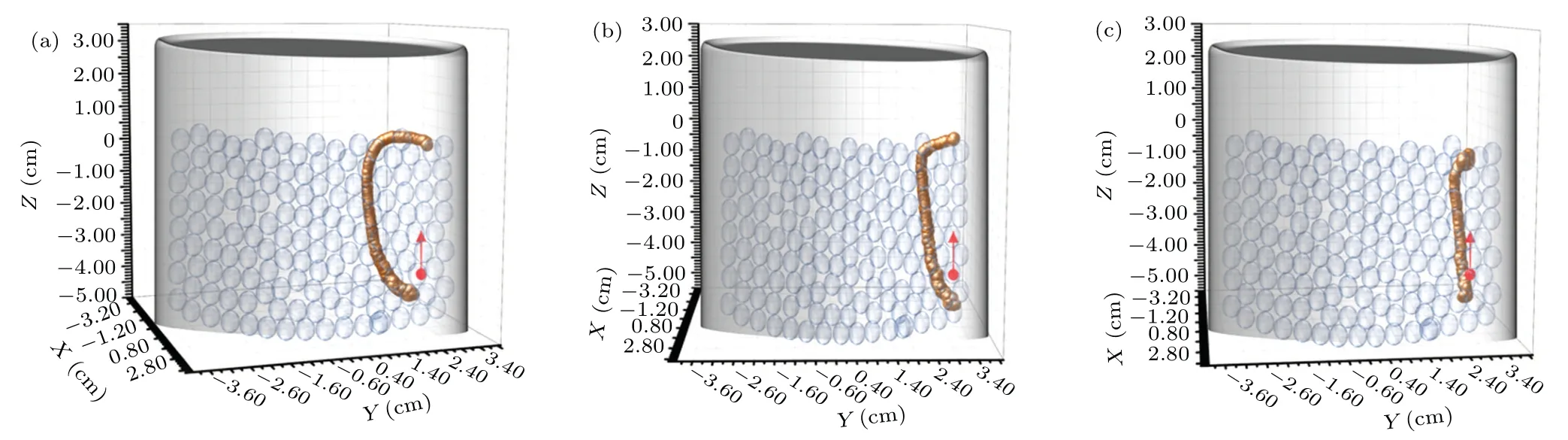
Fig.7.The three-dimensional trajectories of the intrusion particle rising from the bottom sidewall under different vibration acceleration conditions: f =35 Hz,Γ =1.5(a),Γ =2.5(b),and Γ =3(c).
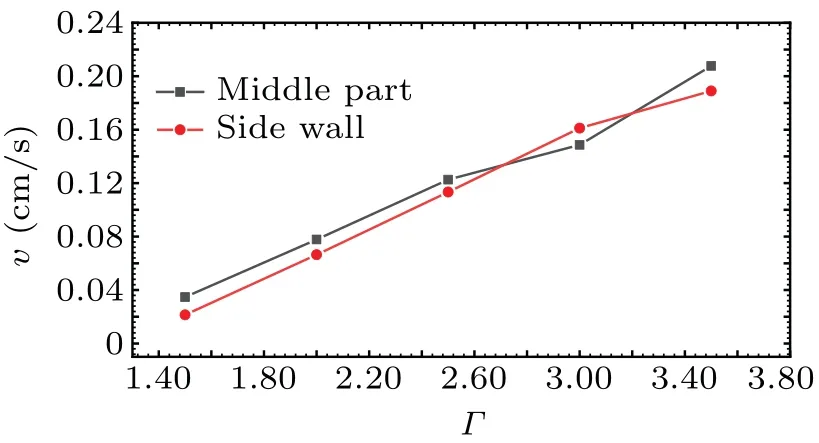
Fig.8.Comparison of the upward velocities of the intrusion particle from the bottom sidewall and center under a vibration frequency of f =25 Hz.
4.Conclusion
In this study, we apply the Hall-effect sensor array magnetic measurement technique to track the trajectory of a single magnetic sphere inside a 3D granular bed and directly observe the formation mechanism of the Brazil nut effect.The experiments reveal that for small vibration strength,the intruder sphere initially positioned on the surface of the particle bed remains on the surface, while the sphere initially positioned at the bottom of the bed climbs at a nearly uniform speed to the surface,exhibiting the upward motion characteristic of the Brazil nut effect.For larger vibration strength, the intruder finds an equilibrium position within the granular bed.The intruder initially positioned on the surface quickly sinks to the equilibrium position, while the large ball initially positioned at the bottom ascends uniformly to the equilibrium position.The equilibrium position is not only related to the vibration strength but also to the density of the intruder, with higher density resulting in a deeper equilibrium position.The presence of an equilibrium position indicates that the stress within the vibrating granular bed is non-uniformly distributed with depth.The particle bed above the equilibrium position exhibits a liquid-like state with lower stress,which is insufficient to support the gravitational force of the intruder sphere.On the other hand, the granular bed below the equilibrium position exhibits a solid-like state and can support the intruder with stronger force chains.Although significant convection is observed among the sidewall particles in the experimental system, it has a secondary influence on the motion of the intruder.Regardless of the initial position of the intruder,at the bottom center or sidewall,the trend is upward motion,and the upward velocities are nearly the same.This indicates that convection is not the primary factor leading to the upward motion(i.e., the Brazil nut effect) of the intruder in our experiment.Since the upward velocity of the intruder is proportional to the vibration velocity (in fact, to the amplitude and frequency of the vibration platform),we attribute the upward motion of the large ball to the void filling effect of the solid-like granular bed.The small-sized bed particles fill the void below the large intruder during each vibration cycle,gradually lifting the large intruder and eventually raising it to the equilibrium position.The equilibrium position essentially represents the interface between the“solid-like”and“liquid-like””regions in the partially fluidized granular bed.
Acknowledgements
Project supported by the Space Application System of China Manned Space Program and the National Natural Science Foundation of China (Grant Nos.12072200 and 12002213).
- Chinese Physics B的其它文章
- Single-qubit quantum classifier based on gradient-free optimization algorithm
- Mode dynamics of Bose-Einstein condensates in a single-well potential
- A quantum algorithm for Toeplitz matrix-vector multiplication
- Non-Gaussian approach: Withstanding loss and noise of multi-scattering underwater channel for continuous-variable quantum teleportation
- Trajectory equation of a lump before and after collision with other waves for generalized Hirota-Satsuma-Ito equation
- Detection of healthy and pathological heartbeat dynamics in ECG signals using multivariate recurrence networks with multiple scale factors