融入公交车与自动驾驶车队的异质交通流模型
2023-11-03 03:43耿浩然鲁光泉
西南交通大学学报 2023年5期
梁 军 ,耿浩然 ,陈 龙 ,于 滨 ,鲁光泉
(1.江苏大学汽车工程研究院,江苏 镇江 212013;2.北京航空航天大学交通科学与工程学院,北京 100191)
网联自动驾驶汽车是汽车产业与新时代物联网、人工智能、大数据等信息技术深度结合的产物,其依托于车联网与交通大数据,可以大幅提升车辆的便利性和舒适性.随着网联自动驾驶车辆涌入传统的交通网络,城市道路上开始出现人工驾驶车辆(human-pilot vehicle, HPV)与网联自动驾驶车辆(connected and autonomous vehicle, CAV)混行的异质交通流,车辆间的相互作用随之发生显著变化,道路交通正呈现出崭新的格局[1-6].
异质交通流中存在的车型主要可分为小汽车与公交车.由于公交车固定线路与固定时间的营运特点,一般来说较为容易率先实现自动驾驶,然而部分地区受限于其运行环境与城市情况,相比较于小汽车而言,无人公交车难以进行商业化,在此条件下就会存在着人工驾驶公交车、人工驾驶汽车与自动驾驶汽车混行的情况.混合着3 种驾驶类型的车流是否呈现出与传统异质流截然不同的特性尚不明确,因此,针对存在人工驾驶公交车的异质交通流特性进行研究对于明确其交通流特性,减少交通延误,提高道路通行效率均有重要的现实意义.
目前,针对异质交通流的研究成果较为丰富.Fakhrmoosavi 等[7]搭建了CAV 与HPV 模型,考虑了不同车型交互以及驾驶行为、异质要素对交通流的影响,研究结果表明,CAV 可以在一定程度上提高道路的通行效率与道路安全性.Talebpour 等[8]采用博弈论的方法建立了车辆换道模型,并设计不同换道模型的仿真框架,使其能预测混行交通流中车辆的换道行为,但是该模型效果一般,预测能力有限.Sala 等[9]使用概率论估计异质流中CAV 的分布,通过分析车辆排队策略后发现自动驾驶车辆的队列长度可以有效提升道路通行能力.Zhou 等[10]建立一个四车道的元胞自动机模型框架模拟异质车流,并结合异质要素的相互作用提出了改善道路通行能力的策略.而对公交车,相关研究中则常以提高其通行效率、服务能力为目标,少有研究对混行环境进行综合考虑.Li等[11]考虑到了延迟干扰和乘客需求因素,构建公交车控制模型并制定出非线性控制策略,提高了公交车的服务能力与通行效率.综合来看,虽然现有对异质流研究中使用的方法各异,但是其中大多数研究仅针对车型为小汽车的CAV 与HPV 间的关系进行研究,涉及到公交车、车队排列、跟驰模式方面的研究较少,针对公交车的研究也少有将混行环境纳入考虑,相关交通流特性仍待揭示.
文中以城市道路中存在公交车的异质交通流作为研究对象,考虑了道路上存在的4 种跟驰模式与CAV 车队的特点建立各模式下的跟驰、换道模型与HPV 加塞模型,并通过仿真实验对此状态下的异质流特性进行相关分析研究.
1 异质交通流中车辆跟驰模式分析
根据异质流中存在的车辆驾驶类型,将车辆的跟驰模式分为4 种,即:人工驾驶汽车跟驰模式、人工驾驶公交车跟驰模式、自适应巡航控制模式(adaptive cruise control, ACC)、协同自适应巡航控制模式(cooperative adaptive cruise control, CACC)[12].同时,为区分人工驾驶汽车与人工驾驶公交车,将HPV 分为HPVc与HPVb分别表示上述2 种人工驾驶的车辆类别.跟驰类型如图1 所示.
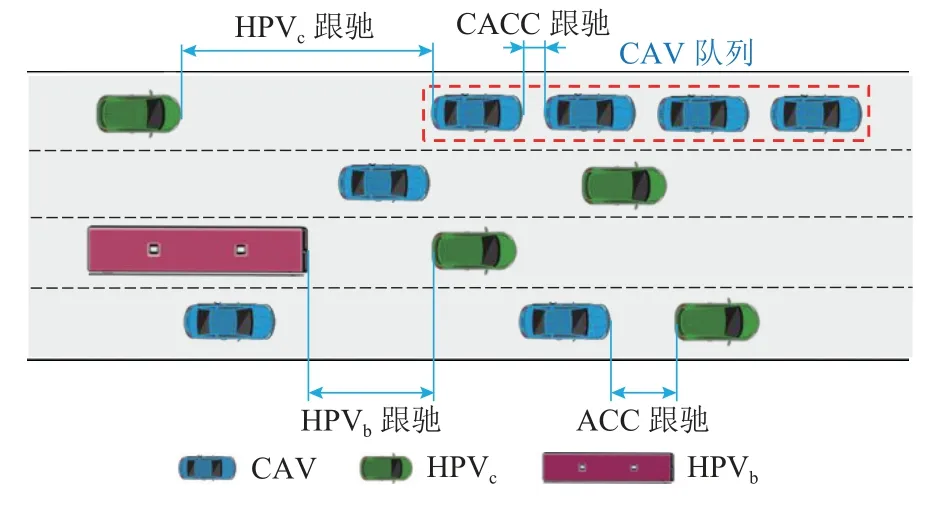
图1 跟驰类型示意Fig.1 Schematic of car following type
1.1 人工驾驶小汽车跟驰模式
此种跟驰模式为HPVc跟驰前方车辆,小汽车在道路上表现出的交通特征完全取决于驾驶员的决策和操作,然而,也正是因为人的局限性而无法感知周围车辆的速度、加速度等信息,只能依靠经验和感觉进行预判.所以,这种跟驰模式下小汽车无法与周围车辆协同行驶,也无法与前车形成队列,而且,车辆的速度会因为驾驶员的情绪变化或驾驶状态不定而产生波动.
1.2 人工驾驶公交车跟驰模式
与HPVc跟驰模式相似,人工驾驶公交车跟驰模式为HPVb跟驰前方车辆,公交车的行驶状态依赖于公交车司机的操作状态,无法与其他车辆协同行驶的同时,亦存在不定的速度波动;由于公交车具有体型大、不灵活的特点,其制动距离一般比小汽车更远,也因为公共交通对安全性具有较高的要求,所以相比于小汽车,此种跟驰模式下驾驶员往往倾向于保持更低的行车速度与更远的跟车距离.
1.3 ACC 跟驰模式
ACC 跟驰模式是指CAV 跟驰前方HPV,这种情况下,CAV 可以获取前方及周围车辆速度、位置、跟车距离等信息,并通过ACC 控制单元控制车辆始终与前车保持安全距离.由于车辆是计算机进行控制,比人类驾驶员反应更快,需求的安全距离更短.
1.4 CACC 跟驰模式
CACC 跟驰模式为CAV 跟驰前方CAV,由于在通讯范围内CAV 拥有和周围的CAV 通讯交换信息的能力,所以通讯范围内的CAV 可以进行协同驾驶;这种跟驰模式下,CAV 会主动寻求机会组成车辆队列,由于队列中的CAV 可以在短时间获取车队中其他车辆的行驶数据情况,因此,处于车队中的车将逐步形成整体进行同步驾驶,相较于ACC 跟驰模式,CACC 跟驰模式拥有更小的安全距离,更高的通行效率[13].
2 异质流中融入公交车与CAV 车队的跟驰换道模型
2.1 模型约定
道路上车辆种类繁多且HPV 驾驶员行为特性各有不同,要使建立的模型完全符合实际情况较为困难,因此,需要在具有普遍性的假设前提下建立模型[14],文中对模型约束如下:
1) 车辆于水平路面运行;
2) 天气状况为晴天;
3) 车辆按照类型分为公交车和小汽车两类,同类车辆大小一致,不存在性能差异;
4) 道路中的公交车为人工驾驶车辆.
2.2 模型参数说明
首先,对构建模型使用到的参数进行相关说明,具体如表1 所示.模型中,车道A 与车道B 分别为车辆n所在车道与换道的目标车道.

表1 参数说明Tab.1 Parameter descriptions
2.3 纵向跟驰模型
交通流中存在着4 种不同的跟驰模式,因此,纵向跟驰模型必须考虑不同跟驰模式的特征,例如:CACC 模式下会形成CAV 队列,ACC 模式下车辆相比HPV 跟驰模式拥有更快的反应时间与更短的安全距离.要在保障安全的前提下进行车辆跟驰,首先要获得需要保持的安全距离,安全距离示意如图2 所示.
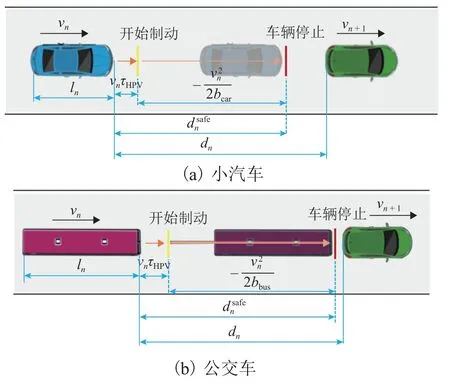
图2 小汽车、公交车安全距离Fig.2 Safe distances for cars and buses
安全距离[12,15]定义为
式中:bcar、bbus为负数.
式(1)由两部分组成:第1 部分为驾驶员反应时间内行驶的距离,根据当前车辆n的跟驰模式进而判断车辆驾驶类型从而采用不同反应时间;第2 部分为车辆自制动开始到停止的距离.为保证行车安全,CACC 模式下排队最小间距设置为安全距离.
2.3.1 加速
基于式(1)确定的车辆安全间距,结合4 种跟驰模式特性,将车辆在道路中的加速规则统一设置为
式中:k1=3.6/,用于当前车辆加减速时机判断.
式(2)依据车辆n的跟驰类型进行加速规则判断,HPVb、HPVc、ACC 跟驰模式的车辆适用式(2)前半段的加速规则,因为安全距离相异,不同跟驰模式使用同一加速规则模型呈现不同的加速状态;式(2)后半段为CACC 模式加速规则,(dn-)/∆t+vn+1(t)表示车辆在下一时间步与前方形成队列所需要的速度,即当CAV 发现前车CAV 符合组成队列条件时,根据前车调整自身速度状态,以此逐渐形成车队[12].数值仿真中,将按照车辆n类型确定an、的取值.
2.3.2 减速
按照跟驰模式特点来解析减速规则:CACC 模式下的车辆与车队中的其他车辆维持统一速度,整个车队的速度变化同步进行,HPVb、HPVc跟驰模式会因为驾驶类型不同选择不同的减速时机.定义系数k2表示安全距离与车距的关系:
4 种跟驰模式中道路车辆减速规则统一设置为
处于不同的跟驰模式下的车辆会根据其安全距离在不同的时机进行减速.与其他跟驰模式不同的是,CACC 除了保持最低限度的安全距离条件之外,队列中的速度是保持一致的,因此,车队整体处于稳定状态.
2.3.3 随机慢化HPV 特有的随机慢化现象主要描述道路上车辆因为不确定因素而导致的不规则减速情况,prandom为发生随机慢化现象的概率,对随机慢化定义为
式中:a为系数,当 γn=1 时,a∈[0,bcar] ,当 Ωn=1 时,a∈[0,bbus].
2.3.4 跟驰模型位置更新
车辆位置更新情况如式(6)所示.
2.4 横向换道模型
在没有障碍物的道路上,车辆往往会以更快的行驶速度与更高的通行效率为导向执行换道,因此,对车辆的换道条件、换道概率以及换道的过程依次进行分析.从CAV、HPV 2 个方面对换道行为建模.具体换道场景如图3 所示.
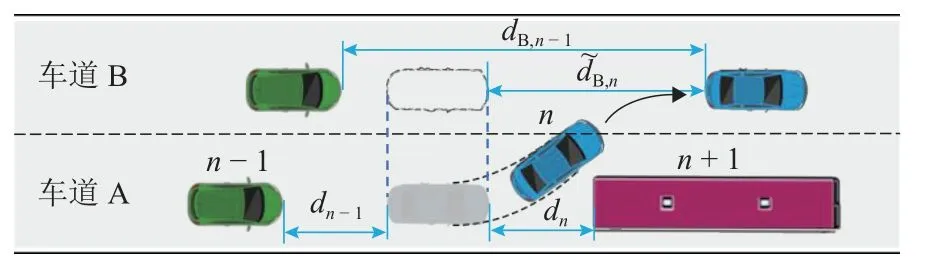
图3 换道过程Fig.3 Lane-changing process
2.4.1 CAV 换道模型
CAV 的跟驰模式分为ACC 模式与CACC 模式2 种,由于CAV 优先以队列状态进行行驶,因此,处于CACC 跟驰模式下的车辆会保持队列状态,不进行换道;当车辆的跟驰模式为ACC 时,为获得更好的行驶环境,车辆会对周围行驶环境进行换道条件判断,当满足条件,即车辆换道可获得更优的行驶环境时,车辆会选择进行换道.对CAV 换道条件定义为
式中:xB,n(t) 为时刻t车辆n在目标车道(车道B)上的位置; ∧ 为逻辑合取,即“与”,逻辑表达式结果为0 或1,当结果为1 时,表示满足式中所述条件,余同.
式(7)分为5 部分:第1 部分用于确定车辆不在队列中且跟驰模式为ACC 跟驰模式;第2 部分用于确定换道车辆在目标车道位置无其他车辆占用;第3、4 部分分别判断本车道前后、目标车道B 的车距安全性;最后一部分表示CAV 各对两条车道检测范围内获取的车辆数据进行计算,确定目标车道通行效率高于本车道后才进行换道.CAV 换道场景如图4 所示.
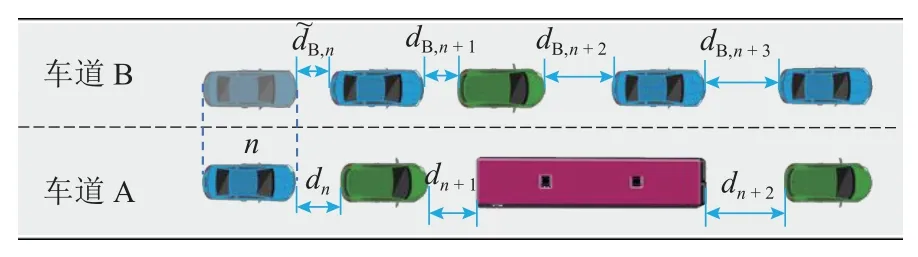
图4 CAV 换道场景Fig.4 CAV lane-changing scenario
引入参数k3判断目标车道前方是否存在CAV队列,如式(8)所示.
式中: βB,n与 αB,n为车道B 上车辆n的前方车辆跟驰模式判断参数.
定义车辆从车道A 换道至车道B 的概率为
式中:O为排队强度,O∈ [0, 100%].
此处定义的换道概率决定车辆换道时机,当CAV 检测到目标车道前方存在CAV 队列时,车辆会将O作为换道概率,O反映混合交通流中CAV 的集群强度,即O量化了CAV 排队的程度,当O越大,CAV 越倾向于以队列形式行驶,换道组成车队的概率越大,O=100%时,全部CAV 会聚集成为一个队列,O=0 时,混行交通场景中不存在CAV 队列.
2.4.2 HPV 换道模型
1) 正常换道
将HPVc与HPVb换道模式进行统一分析,换道条件如式(10)所示.
根据安全距离、车长、车距的不同,HPVc与HPVb会选择不同时机进行换道,HPV 换道概率为
2) 加塞
加塞的发生往往导致拥堵,主要因为驾驶员对周围车速度预估不准确,从而导致车辆“插队”所致,加塞模型如式(11)所示.
由于满足式(11)条件时驾驶员不一定选择进行“插队”,加塞现象也就不一定会发生,因此,使用参数pg来表示满足加塞条件后加塞现象发生的概率.加塞会造成车辆跨车道占用情况,位置更新如式(12)所示.场景示意如图5 所示.图中,Call(•) 表示该时刻车辆占用位置范围内的所有元胞.
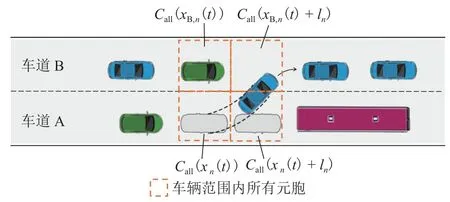
图5 加塞场景示意Fig.5 Cutting-in scenario
式(12)分为两部分:前半部分表示当前车辆所处车道位置的前方一个车长位置所有元胞状态为被占用;后半部分表示目标车道相同位置处于占用状态,发生加塞时,车辆周围间距无法达到正常车辆换道要求,因此,会造成跨车道占用的情况,给车辆正常通行造成极大影响.
2.4.3 换道模型位置更新
换道后,车辆位置更新情况表示为
式中:xA,n(t)为时刻t车辆n在车道A 的位置.
3 数值仿真分析
以长度为1 000 m,宽为10.5 m 的三车道城市公路为例,每条车道宽3.5 m,设置元胞长度lc为0.5 m,小汽车、公交车的长度分别为5、12 m[16],且这2 种车型最大速度设置为17、12 元胞/时间步,每个时间步设置为0.5 s,采用周期性边界条件,其余参数如表2 所示.

表2 仿真参数设置Tab.2 Simulation parameter setting
在初始状态下,车辆在道路上均匀分布,速度随机生成,2 种车辆的到达服从系数不同的泊松分布.同时为获得较为稳定的数据进行分析,仿真总时间设置为2 400 时间步,将后1 800 时间步作为目标数据进行分析.以此处理使得数据更加贴合实际道路车辆通行情况.
3.1 异质流中不同CAV 渗透率与排队强度影响分析
CAV 渗透率(Pcav)越高,通行效率越高.但在一定渗透率区间内,当众多CAV 不以队列状态行驶而分散在道路中时,其各自会受制于前方存在HPV 的行驶状态,从而可能导致提升Pcav不会获得理想的通行效率增益,即通行效率不一定会随Pcav提升而产生明显的变化.为对上述问题进行研究,基于文中的跟驰与换道模型分别设置3 组不同CAV 渗透率与排队强度进行对比,运行实验绘制3 条车道(车道1~车道3)时空图如图6 所示.
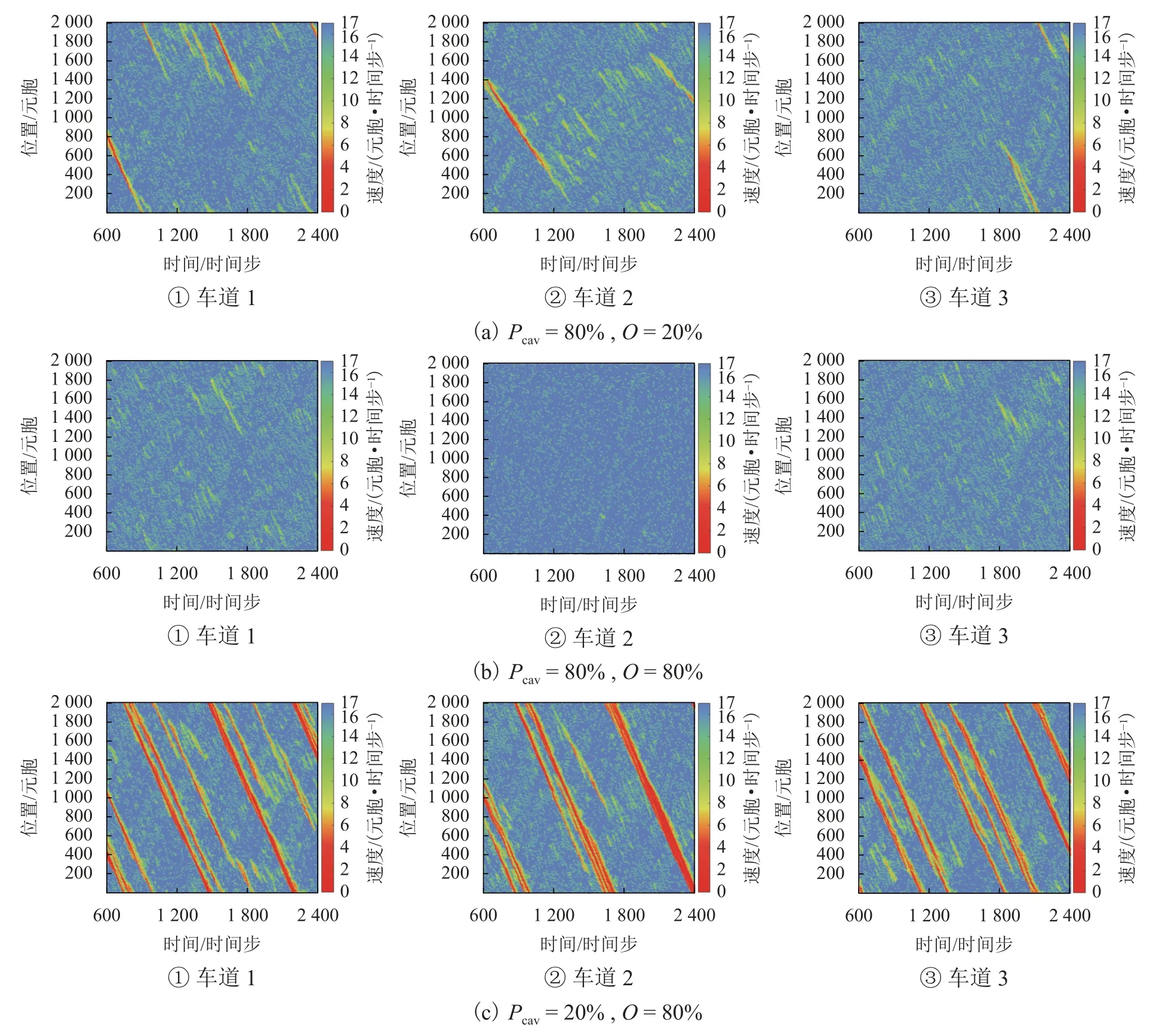
图6 不同CAV 渗透率与排队强度下的时空图Fig.6 Spatio-temporal diagram with different CAV permeabilities and queuing intensities
由图6 可得:80% CAV 渗透率下,高排队强度促使CAV 以队列状态高效通行,有效改善了拥堵情况,这点在图6(a)、(b)中车道2 的时空图变化中较为明显,由此可见,在高CAV 渗透率下,相较于普通行驶状态,车辆形成队列形式行驶仍可进一步提升道路通行效率;当CAV 渗透率低至20%时,即使设置了80%的排队强度,道路中仍旧出现了多段拥堵,这说明高排队强度对道路通行效率的提升是以高CAV 渗透率为前提,在低渗透率下,即使是高排队强度也无法显著提升通行能力.
3.2 异质流中不同CAV 渗透率下公交换道行为影响分析
3.2.1 公交换道频率影响分析
设置Pcav= 20%,40%,60%,80%,并以驾驶员换道意向p2控制公交车的换道频率,不同于模型中决定换道时机的换道概率参数,这里p2用于判断公交车是否出现换道,即满足驾驶员换道意向p2,车辆进行换道,控制流程如图7 所示.
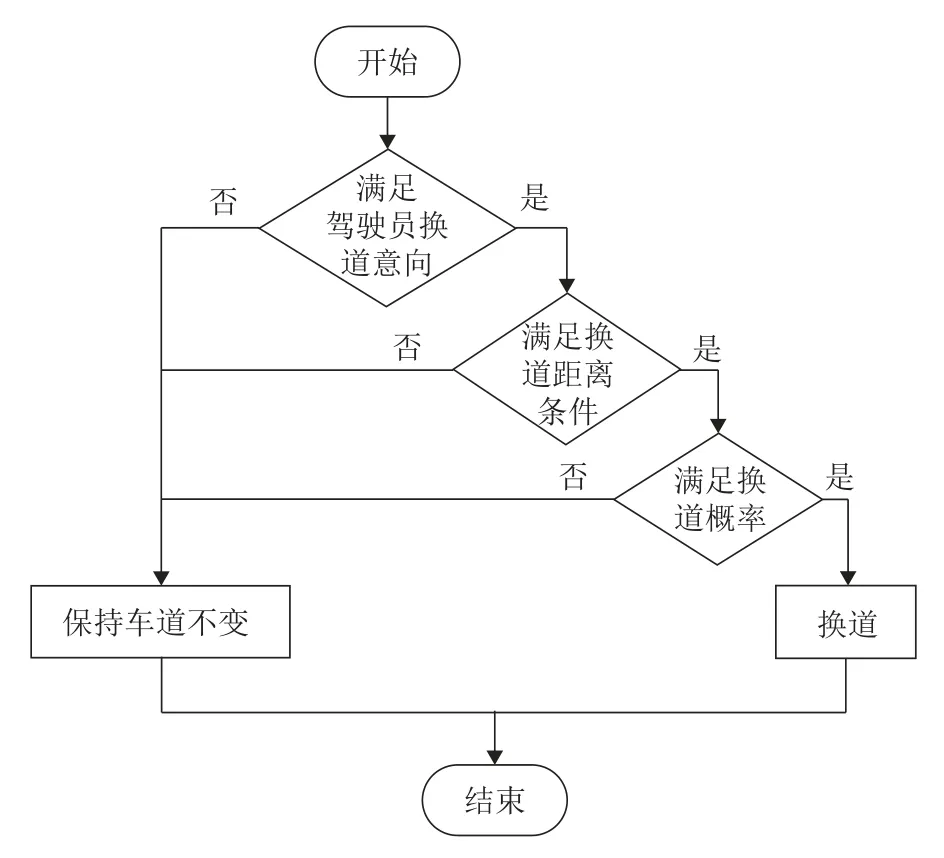
图7 公交车换道流程Fig.7 Process of bus lane change
公交换道次数对应的通过流量为5 次仿真数据后的平均值.数据处理后,将公交换道次数顺次排列,所得公交车换道次数与交通流量关系如图8 所示,各渗透率下的流量均值与方差如图9所示.
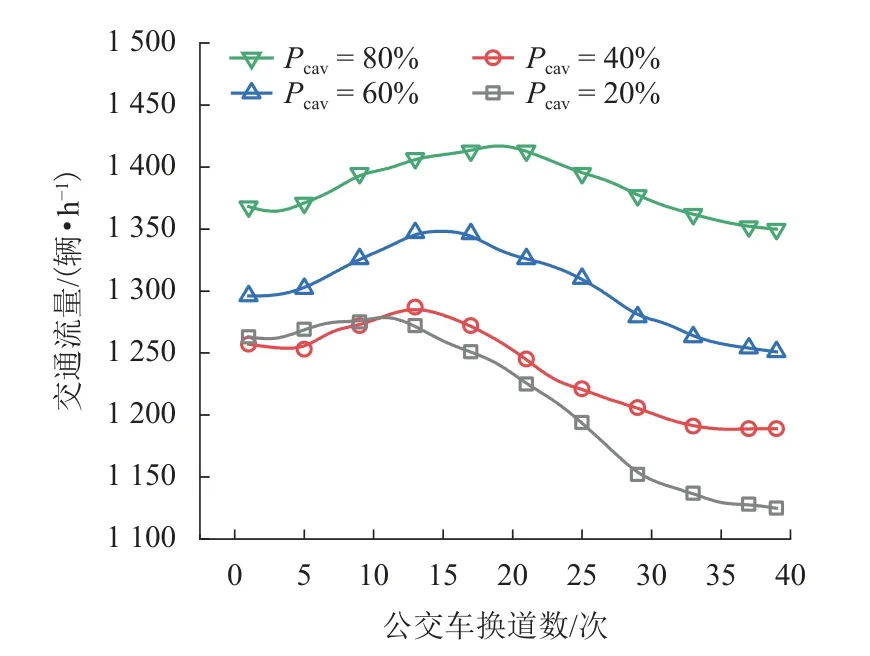
图8 公交车换道次数-交通流量示意Fig.8 Bus lane-changing times versus traffic flow
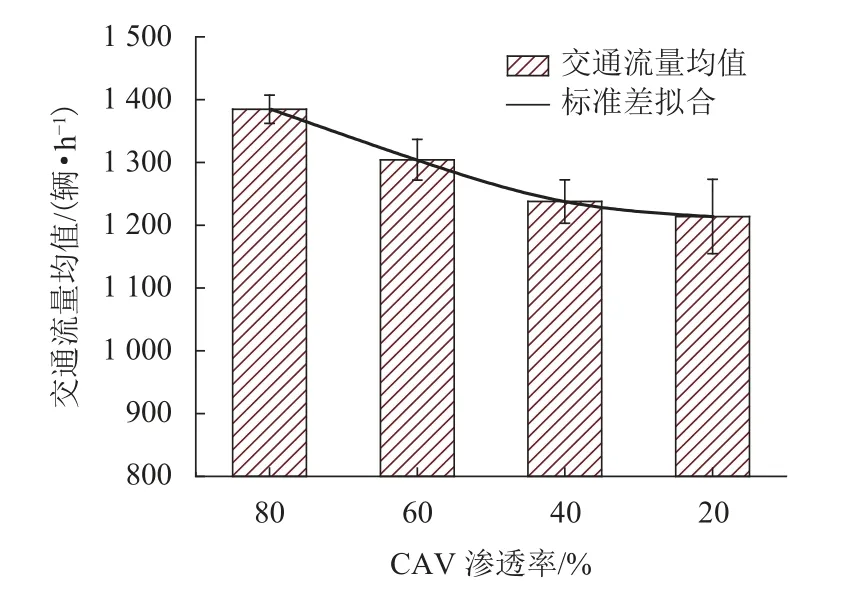
图9 不同CAV 渗透率下交通流均值及标准差Fig.9 Mean and standard deviation of traffic flow under different CAV permeabilities
由图8 可以发现,公交换道次数的增加造成交通流量呈现出先增后减的趋势,这是因为少量公交换道使道路通行能力得到充分的运用,优化了车流排列,提高了运行效率;而由于车辆跟驰具有滞后、传递的特性,过多的公交换道会对周边车辆产生干扰,造成局部低效率运行情况,进而影响到整体车流通行能力.此外,当公交换道较多时,交通流量波动较小,这是由于此时换道多发生于拥堵路段上游,对整体交通流影响较小.
由图9 可见:Pcav为20%的情况下所得数据相较于其余3 种情况拥有更大的标准差,因为渗透率低时,HPV 只能根据其跟驰车辆情况行驶,无法获知更多信息,具有短视、盲目的特点;Pcav为80%时,多数车辆可以获取实时道路状况信息提前做出决策并选择最优行驶策略,减少了车辆的启停时间,并削弱了公交车的换道带来的影响,此时数据波动较小,即公交换道对此状态下交通流造成的影响较弱.
为进一步明确交通流量和公交换道次数这2 个统计变量之间的相关性,绘制相关性热图,如图10所示.
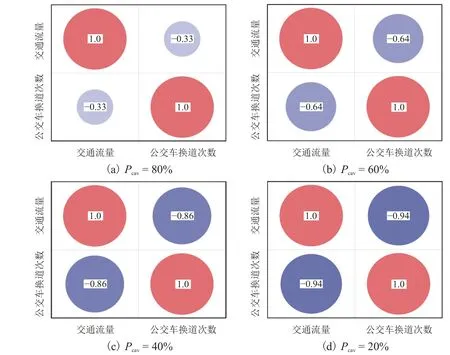
图10 交通流量与公交车换道次数相关性热图Fig.10 Heat map of correlation between traffic flow and number of bus lane-changing times
图10 中,正值表示正相关,负值表示负相关,数值的绝对值越大,相关性越强.由图可看出,交通流量与公交车换道次数呈现出负相关的关系,且自动驾驶车渗透率增大,两者相关性越弱,符合文中所述两者对应关系.
已知不同CAV 渗透率下公交换道会造成不同程度的通行效率衰减,但是其是否会对车流整体运行速度产生影响仍待讨论.为此,设置Pcav=20%,p2=20%,40%,60%,80%,通过逐渐增加公交车驾驶员的换道意向来增加公交车换道的次数,车流的平均速度图像如图11 所示.
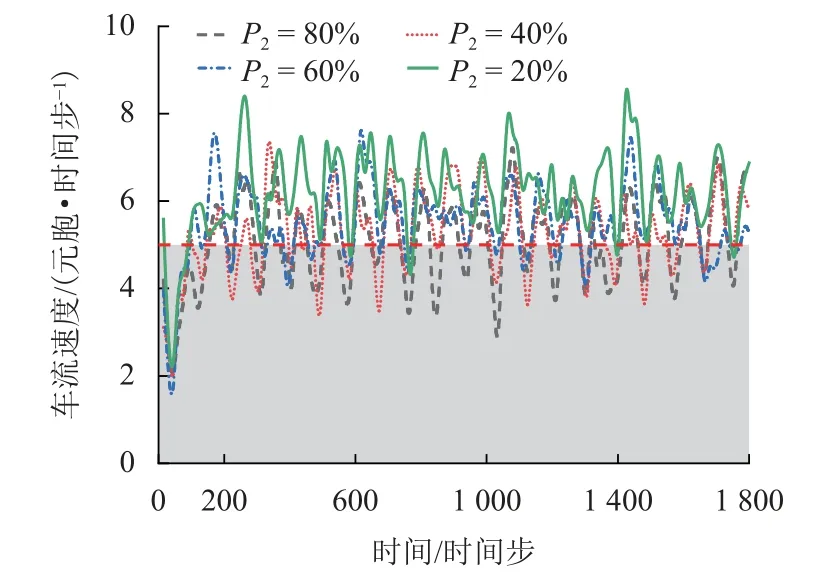
图11 不同驾驶员换道意向下车流平均速度Fig.11 Average traffic speed under lane-changing intentions from different drivers
由图11 可知:当公交换道次数增多时,交通流平均速度随之下降;随着公交换道次数变多,仿真时间段内速度图像呈现出向下偏移的趋势;p2为80%时,由于公交车的频繁变道对车流整体通行速度造成较大影响,这时车流速度曲线一半位于基线之下;当p2为20%时,车流速度曲线大部分位于基线之上,只有极少时间车流速度小于基线5 元胞/时间步.综上,当p2为20%时的车流运行效率远高于p2为80%时的车流运行效率,这说明公交换道并不仅仅减少交通流量,还会对车流平均速度产生较大影响.
3.2.2 公交换道下HPVc执行率影响分析
当前方产生交通状况时,人类驾驶员往往想要第一时间更换车道,然而,周围的环境情况以及驾驶员自身的性格特性有时会使其放弃执行换道的想法,并减速、等待.文中所述HPVc执行率为描述HPVc遭遇公交换道时选择更换车道的概率变量.为探究不同HPVc执行率pe下公交换道带来的影响,针对HPVc执行率进行控制,记录不同密度下的车辆平均延误,具体控制过程伪代码如图12 所示.
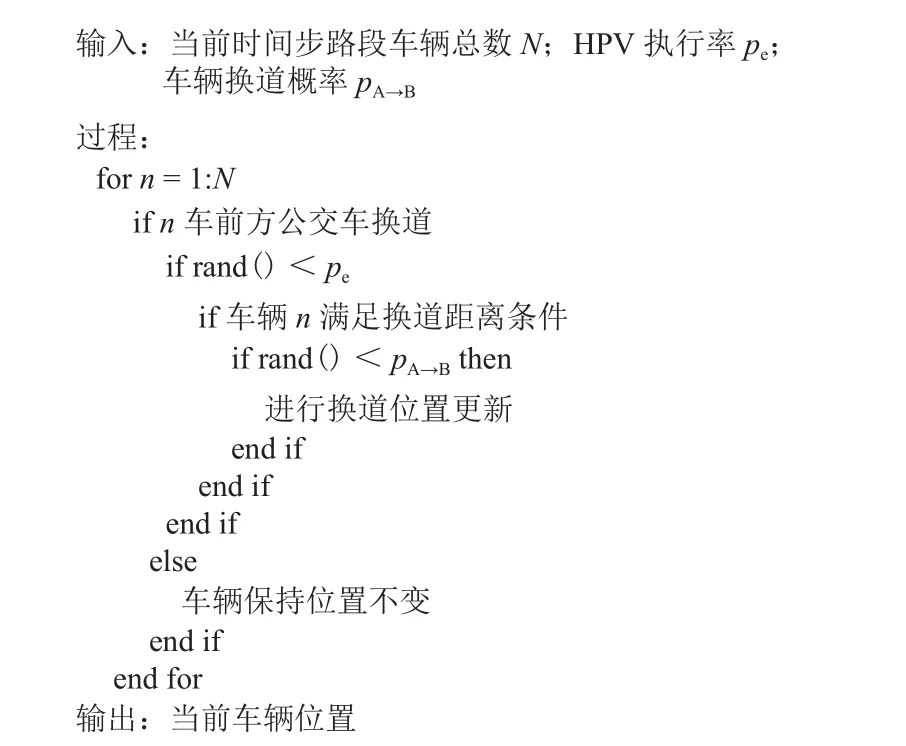
图12 HPV 车辆遭遇公交车换道决策过程Fig.12 Decision-making process of HPV vehicle encountering bus lane change
每次实验运行5 次取平均值进行数据记录,所得不同CAV 渗透率中各HPVc执行率下车辆延误如图13 所示.
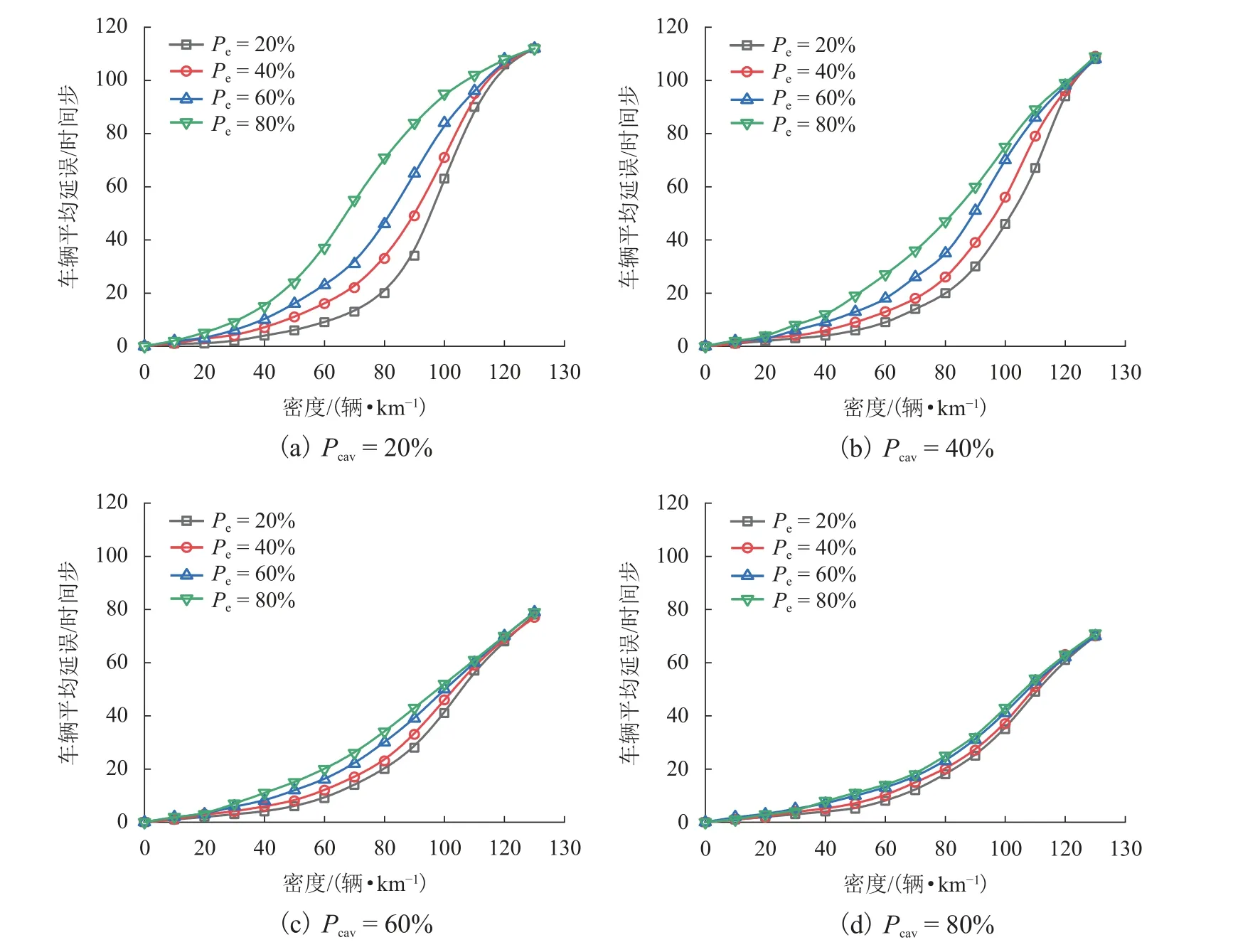
图13 不同CAV 渗透率下4 种HPV 执行率对应的密度-车辆平均延误Fig.13 Density versus vehicle average delay with four types of HPV execution rates at different CAV permeabilities
从渗透率方面看,随着CAV 渗透率上升,不同pe曲线呈现越来越“贴合”的特点,这说明随着CAV 增加,遵从不同HPVc执行率的小汽车对通行产生的干扰逐渐减小,Pcav=20%时,多数车辆是人工驾驶,此时高执行率促使更多HPV 换道,道路通行效率受到较大影响;Pcav=80%时,路上多数车辆为自动驾驶,HPVc执行率及其变动产生的影响被大幅削减.从执行率方面看,高执行率会在特定密度,即车流特定阶段下对通行产生更高干扰,这种情况多数发生在同步流这一相位[17],而当密度继续上升,不同执行率对交通流影响的差异性逐渐消失,因为在高密度状态下的环境条件限制了车辆换道,拥堵情况下基本不存在换道情况,即此时HPVc执行率对交通流影响十分有限.
4 结 论
1) CAV 渗透率不是提升道路通行效率的唯一指标,当CAV 形成队列时,其给道路通行能力带来的增益要比单独提高渗透率高许多.针对道路中CAV 进行队列化管理将在原本渗透率基础上进一步提升通行效率.
2) CAV 渗透率越低,公交换道产生的通行效率衰减越严重,渗透率越高,公交换道的影响越小;HPVc执行率在不同交通密度下对交通流的影响具有差异性,同步流状态下交通流对HPVc执行率变化较敏感,容易受其干扰,堵塞流状态下公交车换道条件受到制约,HPVc执行率变化对通行效率影响十分有限.
3) 未来将针对CAV 队列中的车辆间距,最大排队长度进行研究,并尝试对公交车队列、公交车停靠站影响方面进行相应的探索.
猜你喜欢
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
军营文化天地(2018年2期)2018-12-15
产品可靠性报告(2017年7期)2017-09-05
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
物理实验(2015年10期)2015-02-28
数学年刊A辑(中文版)(2014年1期)2014-10-30