变电站巡检机器人老旧表计识别性能提升
2023-11-05 13:09邵健伟郭晋超
电力安全技术 2023年9期
张 珂,王 静,邵健伟,崔 鲁,郭晋超,张 勇
(国网江苏省电力有限公司苏州供电分公司,江苏 苏州 215000)
0 引言
变电站设备的精益巡视是保障变电站安全运行的基础[1]。随着设备管理体系朝着“智慧化、实时化、精益化”的转型,以“人工例行巡视远程智能化替代”为代表的智能运检新模式正逐步从构想走向现实。巡检机器人是远程智能巡检系统的核心组成部分,目前已在江苏220 kV 及以上等级的变电站广泛应用。在模式识别、红外热成像、激光导航定位等技术的支持下,巡检机器人能够实现包括表计读数、设备测温、缺陷识别在内的变电站运维常见工作的替代[2],可有效降低人工巡检时长,减少高风险区域停留时间,提高设备运行的安全性以及保障运维人员的人身安全[3-6]。但在实际应用中,巡检机器人对现场表计的巡检过程中常常出现无法识别、错误识别等现象,表计识别准确率低已严重制约远程智能巡检系统的推广。
在表计识别方面,国内外主流方法有两类:一类是通过传统的图像处理进行指针识别获取读数,以基于霍夫(Hough)变换的模板匹配法为代表[7,8],该类方法计算量小,识别较可靠,已大量运用于变电站表计识别领域,但存在识别鲁棒性差,前期模板抓取、数据标定工作量大,算法可移植性较差等缺陷;另一类是采用基于神经网络的深度学习进行表计识别,以目标检测算法(主要是yolo 与Faster-R-CNN)为代表,该类算法的优势是识别精度较高,但识别准确率依赖训练样本集的标注数量与质量,定位准确率较差,且尚未在变电站表计识别领域应用。目前,变电站已投运的巡检机器人均采用基于Hough 变换直线检测的模板匹配法,在算法改进方面,文献[9]增加了指针中心线通过表计中心等约束条件,提高了在恶劣光照条件下表计识别的准确率;文献[10]以模板匹配的方式实现表计与镜头的位置匹配,提高了表计识别算法的鲁棒性;文献[11]使用自适应中值滤波算法对图像预处理,提高了指针式表计的识别精度;文献[12]提出了一种表计图像扫描区域拓展方法,解决了表计液面干扰指针识别的问题。
由于表计与巡检机器人长期投用,存在设备老化等问题,导致现实中表计识别准确率并不理想。上述文献从改进直线检测算法的角度解决表计识别的不同细分领域的相关问题,而未考虑表计观察窗本身的老化模糊问题;同时,变电站内大量配置的巡检机器人因配置时间早,受巡检主机运算能力制约,很难通过整体更换算法的方式来提升表计识别性能。因此,在当前硬件水平及实际条件下,如何提升巡检机器人表计识别的精度,就显得尤为重要。
通过分析云台拍摄虚焦、背光拍摄、拍摄角度偏差、表盘观察窗老化模糊、模板表盘标定误差、比对模板抓取模糊等因素对表计识别精度的影响,提出巡检机器人老旧表计识别性能提升方法并进行验证,结果表明所提出的方法可将表计识别的准确率从54.4 %提升至95.2 %,具备实用价值。
1 表计识别原理介绍
1.1 巡检机器人配置情况
某500 kV 变电站配置了国网智能科技股份有限公司的LER3000B 型巡检机器人,于2013 年投运,与表计识别相关的技术配置见表1。

表1 巡检机器人技术配置
1.2 巡检机器人表计识别原理
LER3000B 型巡检机器人采用基于Hough 变换的直线检测法,其识别过程如图1 所示[13]。
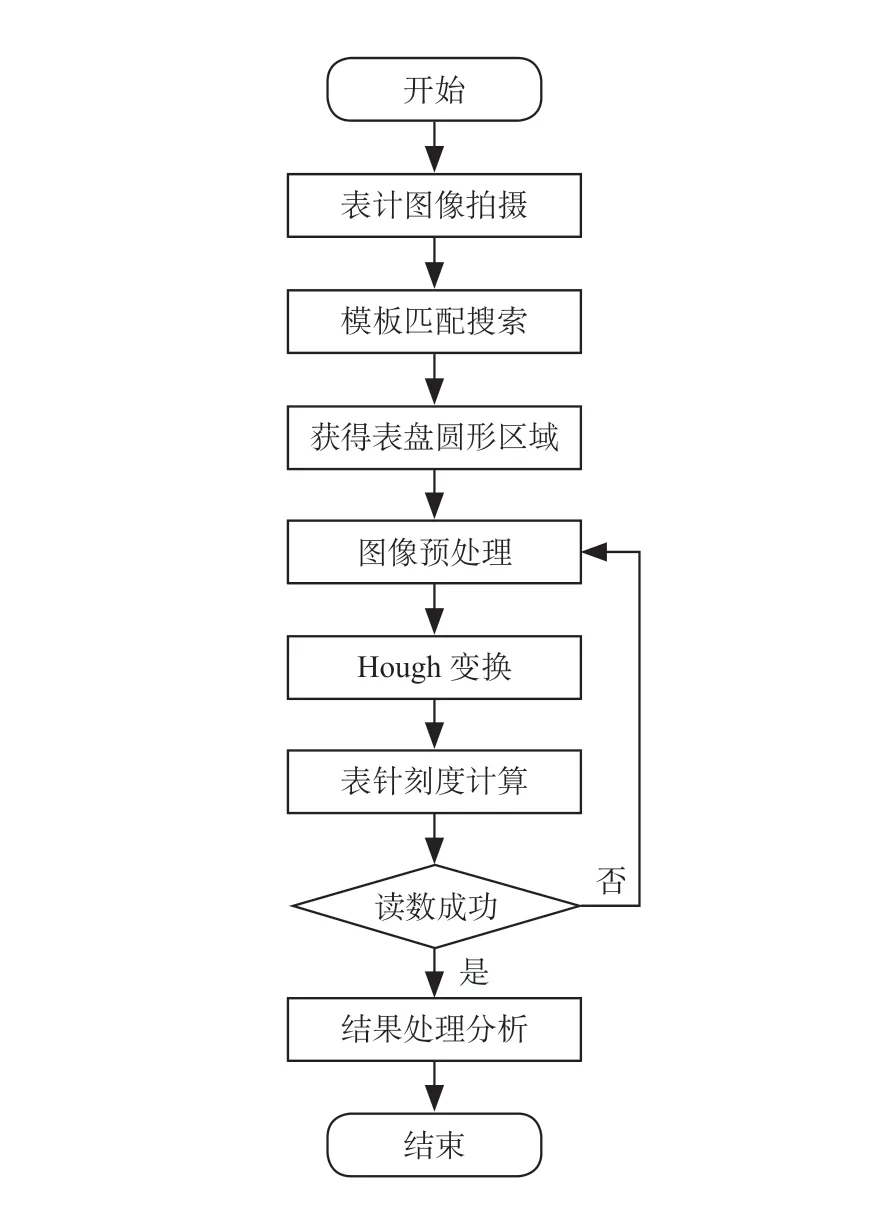
图1 表计识别过程示意
2 常见问题分析
该变电站于2001 年建成,其高风险区域需抄录的表计为开关六氟化硫压力表、开关油压表、避雷器泄漏电流及避雷器动作次数表,后两者虽布置于同一表盘内,但因识别过程相对独立,一般作为两块不同表计进行识别。
巡检机器人表计识别任务一般不安排在恶劣天气下开展的原因主要有:一方面,雾霾、扬尘、暴雨等因素会导致视程与可见度下降,巡检机器人无法清晰拍摄到表计的图像,造成表计数值无法识别;另一方面,恶劣天气本身也会造成巡检机器人故障率上升,因此,在保证镜头分辨率与光学变焦能力达标的情况下,巡检机器人才会开展相关任务。排除天气因素,表计识别错误主要由以下原因造成。
2.1 云台拍摄虚焦
巡检机器人拍摄工作流程为:巡检机器人到达拍摄位置,将镜头对准被拍摄表计,使用初始伺服光学变焦倍率进行一次粗聚焦,在此基础上再微调光学变焦倍率,使得图片焦距正确后拍摄表计图片。在机器人投运时,为保证远处表计的拍摄效果,初始伺服光学变焦倍率常常被维护人员设置成最大值,此时PID 自动调焦功能一旦出现细微扰动,将导致变焦能力超出镜头物理限制,调焦算法存在溢出值,光学变焦倍率将反复振荡,在调焦时间达到最大值15 s 后,镜头自动停止调焦并拍摄图像,造成图像失焦无法辨认。
2.2 拍摄背光影响
室外变电站的一次设备大多处于自然环境中,不同时间段阳光照射的角度对巡检机器人拍摄照片的清晰度会产生影响。若在正午执行巡检任务,由于此时光线直射表计,被摄表计几乎不存在背光,其表盘刻度、指针位置等细节比较清晰,利于巡检机器人拍摄;而在清晨或黄昏执行巡检任务,光线可能从表计背面散发,被摄表计会因背光而变得较暗,其刻度、指针位置等细节也会随之变得模糊,不利于巡检机器人拍摄。
2.3 拍摄点位角度偏差大
巡检机器人的巡检点位一般由工作人员进行布置,一个巡检点位往往需要对周围2~3 个表计进行拍摄。若工作人员规划的巡检点位不合理,将会导致拍摄的表计原始图像角度偏差大,影响表计识别甚至无法识别。
现场对拍摄角度偏差的影响进行了测试,遥控巡检机器人至现场50116 避雷器A 相泄漏电流表附近进行拍摄,人为制造0°~75°的拍摄角度偏差,每个角度进行10 次拍摄,并使用巡检主机进行识别,拍摄偏差角度与可识别率如图2 所示。

图2 拍摄偏差角度与可识别率
图2 中的结果表明巡检机器人镜头与表盘正面偏差超过30°后,识别成功率急剧下降。
2.4 表盘观察窗老化模糊
随着变电站投运时间越来越长,部分表计的表盘观察窗老化模糊现象越来越严重,导致其示数无法被清晰拍摄。此类表盘观察窗的材质一般为丙烯酸塑料(有机玻璃),老化后表面呈磨砂状且发黄,巡检机器人无法清晰拍摄表盘图像,扩大了表计的识别相对误差。
2.5 模板表盘标定误差大
巡检机器人在投运之初会由工作人员对表计的表盘进行标定校准,用以确认表盘的刻度分布,方便算法正确识别指针指向位置的数值。若标定粗糙,机器人识别的表盘刻度分布与实际分布不符,致使算法识别的指针数值和实际值存在偏差,造成数值识别错误。
对某压力表计人为制造-0.3~0.3 MPa 的标定误差,每组试验3 次,分3 天进行,得到表计识别相对误差与模板标定相对误差的关系(见图3),可见两者之间存在强烈的正相关关系。

图3 模板标定相对误差与表计识别相对误差关系
2.6 算法内置比对模板模糊
巡检机器人在投运之初会由工作人员对每一个表计抓取一个比对模板,每次巡检时采用基于模板比对的直线检测算法进行识别,若表计用来比对的内置模板模糊,将影响表计识别的准确度。
参考如上压力表计模板表盘标定相对误差的测试方法,设置观察组与对照组,使用巡检主机进行识别,结果如图4 所示。可见,巡检机器人识别算法内置比对模板模糊会扩大识别相对误差,且误差随机分布。

图4 表计识别相对误差与算法内置模板清晰情况
3 高风险区域老旧表计识别性能提升
拍摄背光问题可采用合理安排巡视时间来解决;拍摄点位角度偏差大可以通过重新规划巡检点位的手段解决;比对模板模糊的问题则可以通过人工在后台遥控机器人,手动调焦抓取清晰模板的方式来解决;模板表盘标定误差大可重新人为进行无差标定,以降低表计识别的相对误差。但拍摄虚焦、表盘观察窗模糊等问题则需要通过优选光学变焦倍率、边缘检测区域椭圆全贴合标注、小区域数据密集标定等方法来解决。
3.1 优选初始伺服光学变焦倍率
巡检机器人表计拍摄虚焦的原因是初始伺服光学变焦倍率设置过高导致。为得到最优的初始伺服光学变焦倍率,选取站内四种表计各8 个,采用步进法设置不同的初始伺服光学变焦倍率进行测算,观察拍摄图片的清晰度,得到的结果如图5 所示。可知,初始伺服光学变焦倍率设置为27 或28 时,清晰占比最高。

图5 拍摄清晰占比与初始伺服光学变焦倍率关系
3.2 边缘检测区域椭圆全贴合标注
巡检机器人表计识别的准确度依赖于前期模板的标注,而机器人投运初期,工作人员常常将表计模板的表盘边缘标注为圆型,且存在与表盘不贴合的现象。通过人为调整边缘检测算法标注区域(根据实际情况标注为圆形或椭圆等形状),使之完全贴合表盘边缘,可有效降低表计识别相对误差。某六氟化硫压力表在不同边缘检测标注方式下的识别结果如表2 所示。

表2 六氟化硫压力表在不同边缘检测标注方式下的识别结果
3.3 小区域数据密集标定
针对表盘观察窗存在老化模糊的问题,在采取准确聚焦、人为无差标定等措施后,表计还会出现识别不准确的问题。
根据Hough 直线检测算法,数据标注对表计识别有钳位作用,因此,对六氟化硫压力表正常运行的0.6~0.8 MPa 区域进行密集标定,间隔从0.2 MPa 缩小至0.02 MPa。小区域密集标定后,该压力表计识别值与真实值一致。此外,老旧的表计还应结合常规的检修工作进行逐步更换。
4 应用测试
按照前述的三种方法改进后,使用LER3000B型巡检机器人对该500 kV 变电站第二串的高风险区域进行表计识别应用测试。
查阅巡检任务报表,巡检机器人对某六氟化硫压力表自动识别的示数为334.86 bar,真实值为336.00 bar,相对误差为0.34 %,识别正确且精度较高;避雷器泄露电流表由于运行时间长,表计表盘老化模糊,巡检机器人自动识别值为1.64 mA,真实值为1.65 mA,相对误差为0.61 %。两次识别的相对误差均小于1 %,识别正确且精度较高。
逐一对比此次巡检报告数据,巡检的总表计数为21 个,识别正确数为20 个,识别准确率为95.2 %,相对误差小于3 %。优化后的表计识别准确率相较优化前的52.4 %有了较大提升。
5 结束语
针对变电站巡检机器人在老旧表计识别上的问题,提出变电站高风险区域老旧表计识别性能提升方法。通过500 kV 变电站第二串高风险区域的表计识别应用测试,该方法对清晰表计与老旧模糊表计的识别相对误差均小于3 %,表计识别准确率从52.4 %提升至95.2 %,有效提高了巡检机器人的工作效率,实现了表计人工抄录工作的智能化替代,保障了人员和设备的安全。
猜你喜欢
中国特种设备安全(2019年4期)2019-05-20
安徽电子信息职业技术学院学报(2019年2期)2019-04-26
摄影之友(影像视觉)(2017年10期)2017-11-07
制造业自动化(2017年2期)2017-03-20
大众摄影(2016年12期)2016-12-07
时代农机(2016年6期)2016-12-01
光学精密工程(2016年1期)2016-11-07
时代农机(2015年3期)2015-11-14
东北电力大学学报(2015年4期)2015-11-13
中国塑料(2015年6期)2015-11-13