基于行车振动的路面车辙评价方法可行性研究
2023-11-10 09:24张金喜王佩荣曹丹丹曾靖翔
中外公路 2023年4期
张金喜,王佩荣,曹丹丹,曾靖翔
(北京工业大学 城市建设学部,北京市 100124)
0 引言
车辙是路面在交通荷载的反复作用下产生的一种永久变形。在沥青路面的养护管理中,路面车辙是一项重要的技术状况指标,同时也与行车的舒适性和安全性息息相关[1]。路面车辙检测技术的总体发展趋势经历了3 个阶段:从传统的人工检测到半自动化检测,再发展到全自动化检测[2-3]。人工车辙检测主要是直尺法,把直尺横放在车辙上部,用量尺测量出最大车辙深度;后期发展到半自动检测,在人工辅助下利用横断面仪进行测量。在中国公路大发展的背景下,这两种检测方法既费时又费力,一般情况下只做少数抽样检测。目前,广泛应用的路面车辙全自动化检测技术主要包括超声波[4]、激光[5]和数字影像[6]检测技术,其中以激光检测的研究应用较多。Wang 等[7]为了提高线激光分布的均匀性和激光束线宽的敏锐度,设计并优化了一种激光束整形系统;郎洪等[8]针对点激光车辙检测技术中车辙深度异常和横断面数据不完整的问题,采用三维线激光技术,提出了一种基于病害三维特征的沥青路面车辙异常检验方法。激光车辙检测的关键在于图像处理,Kage等[9]提出了一种利用激光和车载立体摄像机进行车辙检测的新方法,通过对激光照射到路面的图像进行各种图像处理来检测车辙。
目前,中国的公路建设已从高速发展阶段进入到大规模公路养护时代,面临着重大的养护任务。随着智能化和信息化技术的发展,在线监测已成为今后路面性能检测评价领域的一个发展方向。自动化检测技术虽已较为成熟,但检测成本高、检测频率低(一般为1 次/年),尚不能实现对路况的实时监测。而由于智能手机内置的三轴加速度计、陀螺仪以及全球定位系统等可有效地获取车辆运行过程中的各种数据[10],将智能手机作为检测设备的方法受到了越来越多国内外学者的关注。张金喜等[11]用经遗传算法优化的BP 神经网络建立了Z轴振动加速度特征值和速度与平整度之间的关系;Islam 等[12]将智能手机收集的加速度、时间戳、GPS 坐标数据导入Matlab和ProVAL 软件,计算得 到IIRI值;Wang 等[13]提出 了一种基于马田系统的道路状况检测方法,用于区分井盖、坑洞和减速带;Souza 等[14]结合智能手机传感器和机器学习算法来实现对路面状况的实时评估和监测。车辙也是路面性能的一个重要指标,但目前该方面的理论与应用研究相对较少。
基于以上研究背景,该文将智能手机应用到路面车辙的评价中,分析智能手机采集的振动加速度与车辙深度之间的关系,通过相关性分析和主成分分析确定行车振动指标,最后通过卷积神经网络模型实现对车辙的评价,期望为车辙的在线监测提供新思路。
1 行车试验概况
1.1 试验设备与人员
试验数据采集设备主要包括安装行车数据采集APP[15]的安卓智能手机和多功能路况检测车。行车数据采集APP 由笔者等单独设计研发而成,试验手机的型号为华为荣耀10。行车试验车辆以东风本田CRV 为主,以起亚福瑞迪作为试验对比车辆。车辆的轮胎气压等均为标准车况状态。试验中每辆车配备驾驶员1 人、手机APP 操作员1 人和试验记录员1 人。
1.2 试验路段
行车试验路段应满足具有不同的车辙深度、路段交通量小、路线平顺、路面干燥等条件,以便开展安全行车试验,并获得有效的试验数据。此次试验选择位于山东省济南市东部郊区的3 条普通沥青混凝土道路,路段情况见表1。
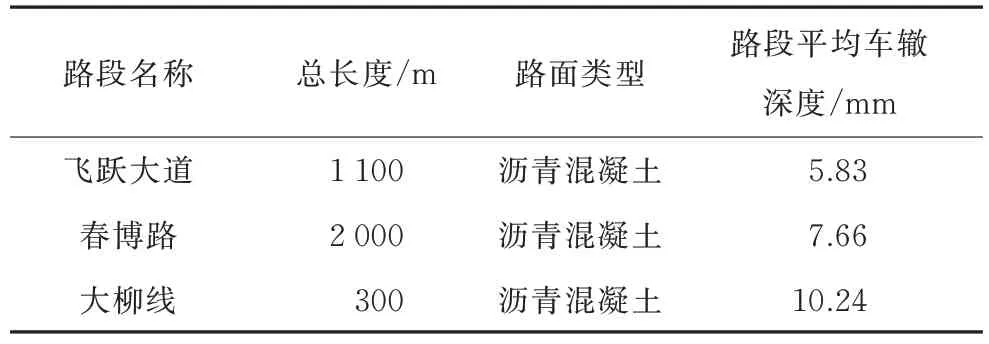
表1 路段情况汇总
1.3 试验方案
将安装数据采集APP 的智能手机用透明胶带水平固定在汽车前排的中央扶手箱上,固定处材质较硬,采集频率设为10 Hz,采集行车过程中的三轴振动加速度、时间、经纬度、速度等数据。手机采集的行车振动加速度,左右方向记为X轴,前后方向记为Y轴,上下方向记为Z轴。试验中,操作员负责操控APP,记录员负责记录路段、编号、开始时间、结束时间、车辆型号、速度特征等。在不变道的情况下,每条试验路段利用两种车型,分别以30 km/h、50 km/h、70 km/h 的速度各重复行驶3 次,试验过程中尽可能保持匀速平稳行驶,采集不同工况下的行车数据。同时利用多功能路面检测车对试验路段进行检测,获取相应的车辙深度数据。
采集的数据主要包括行车数据和路面车辙深度两部分,其中车辙深度的检测单元长度为20 m,为实现行车数据与车辙深度数据的匹配,采用Matlab 编程软件,将行车数据以每20 m 进行截取,为接下来的数据分析做准备。
2 不同工况下的振动特征分析
2.1 Kalman 滤波
在工程应用中,由于受到系统内外部各种因素的影响,经传感器采集和测量的数据往往夹杂着许多不需要的成分。采样得到的三轴振动加速度数据,除了因道路本身引起的车辆振动外,还包含车辆自振、加速度传感器本身以及外部噪声等干扰信号。因此,需要对数据进行滤波处理,消除信号中的噪声与干扰,尽可能还原真实加速度变化情况。因此,该文选用Kalman 滤波来滤除噪声。
Kalman 滤波适用于估计一个由随机变量组成的动态系统的最优状态,即便是观测到的系统状态参数含有噪声,观测值不准确,也能够完成对状态真实值的最优估计。Kalman 滤波的核心思想是:根据当前时刻的仪器测量值和上一时刻对当前时刻的预测值,计算得到当前时刻的最优量,并依据该最优量预测下一个时刻的值[16]。该文应用Matlab 软件实现了Kalman 滤波。图1 为滤波效果对比图。由图1 可以看出:数据经过卡尔曼滤波后,既保留了原有数据的起伏趋势,又基本消除了原数据上的毛刺波动,滤波效果较好。

图1 卡尔曼滤波效果对比图
2.2 不同工况下的振动特征分析
同样的路面以不同的行车速度、不同的车辆通过,引起的振动也具有不同的特点,而且振动加速度的正负只代表方向,与大小无关。为了比较不同工况下的振动变化特点,选择振动加速度绝对值的均值作为反映行车振动的特征指标。
该文按照第1.3 节的方案进行了不同车速和车辆下的行车试验,选取部分路段计算不同工况下的振动加速度绝对值的均值,其变化趋势分别如图2、3 所示。

图2 不同行车速度的振动特征对比图
从图2 可以看出:当控制速度为变量时,速度越大,引起的振动加速度值越大,但不同速度下的振动变化趋势具有一致性。从图3 可以看出:当控制车辆为变量时,起亚福瑞迪产生的振动加速度值比CRV的大,可能是因为车辆悬架系统的不同,CRV 的悬架系统优于起亚福瑞迪,降低了路面引起的车辆振动,但同样,两者具有相似的变化趋势。选择振动加速度绝对值的标准差等其他指标进行比较,结果同上。考虑到在试验中车辆不可能沿着完全相同的路径行驶,而试验速度也会有一定的偏差等原因,因此振动加速度的波动性是不可避免的。综上所述,不同工况下的行车振动大小虽有不同,但其变化趋势具有较高的一致性。
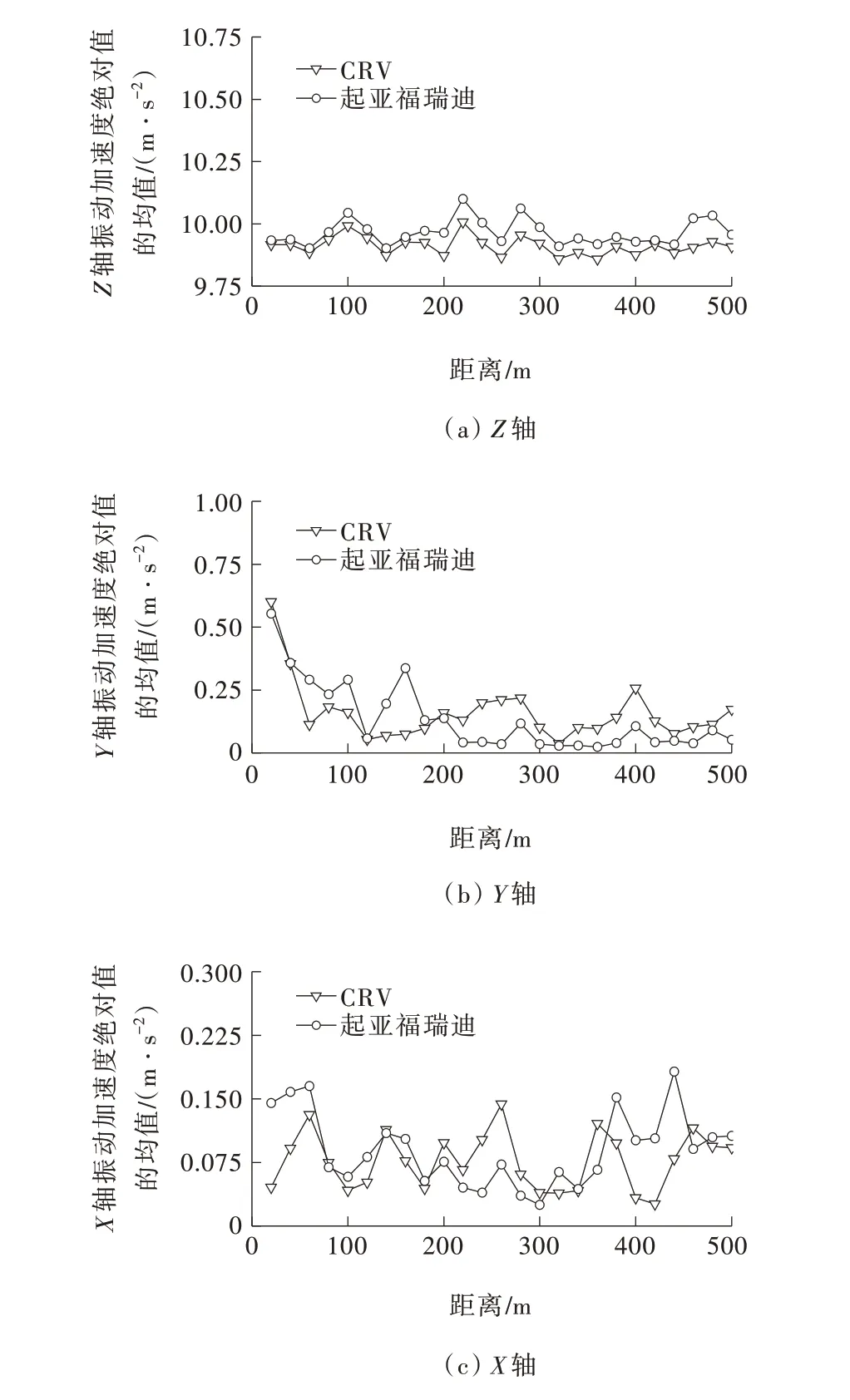
图3 不同试验车辆的振动特征对比图(车速:50 km/h)
由于不同车辆的悬挂系统不同,因此,该文主要以东风本田CRV 车辆的行车振动数据为研究对象。
3 振动特征指标分析与提取
车辆在道路上行驶产生的振动与多种因素有关,既与车辆本身的性能有关,也更多地受到路面性能的影响。与行车振动有关的路面性能包括平整度、车辙、破损等,不同路面特征对行车振动的影响不同。有关研究表明:正常行车状态下,路面平整度会对行车竖向振动加速度产生较大的影响,而对其他方向的振动加速度的影响相对较小。车辙不同于路面平整度,车辙是大致沿轮迹形成和分布的路面凹陷辙槽。首先,由于不同类型车辆轮距的差异,使得车辙的间距与车辆轮距不一致;其次,车辆行驶并不能完全按一条直线行驶,行驶过程中会发生一定的左右摇摆;第三,最重要的是,大量研究表明,车辙不是一条直线的辙槽,而是沿行车方向有一定的左右形状变异,从而导致行车横向稳定性变差,严重情况下会影响行车安全。上述分析表明:车辙是使车辆产生左右摇晃颠簸、引发车辆侧向加速度变化的主要原因。
3.1 行车振动指标相关性分析
为选取车辙评价模型的行车振动加速度最优特征参数,提取3 个轴向的18 个时域特征,包括峰-峰值、有效值、加速度绝对值的最大值、最小值、均值和标准差。为分析车辙深度与各振动指标间的相关性,首先控制速度一定,分别计算速度为30 km/h、50 km/h、70 km/h 时,车辙深度与各指标间的相关系数,然后计算3 种速度下的各指标平均相关系数,在所有显著相关的指标中选择平均相关系数大于0.5 的作为初选指标集,结果如表2 所示。
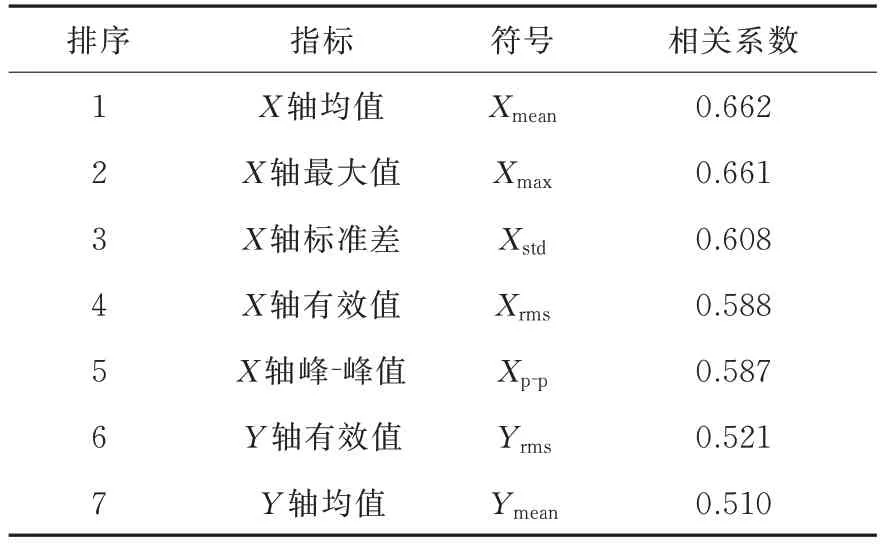
表2 初选指标集
由表2 可以看出:排在前5 位的指标均为X方向的振动加速度指标,排在6~7 位的指标为Y方向的振动加速度指标。故路面车辙主要影响X方向的振动加速度,对Y方向也有一定影响。
上述7 个指标都反映了车辆的振动特征,它们之间也可能存在线性相关性。对7 个指标做相关性检验,结果见表3。
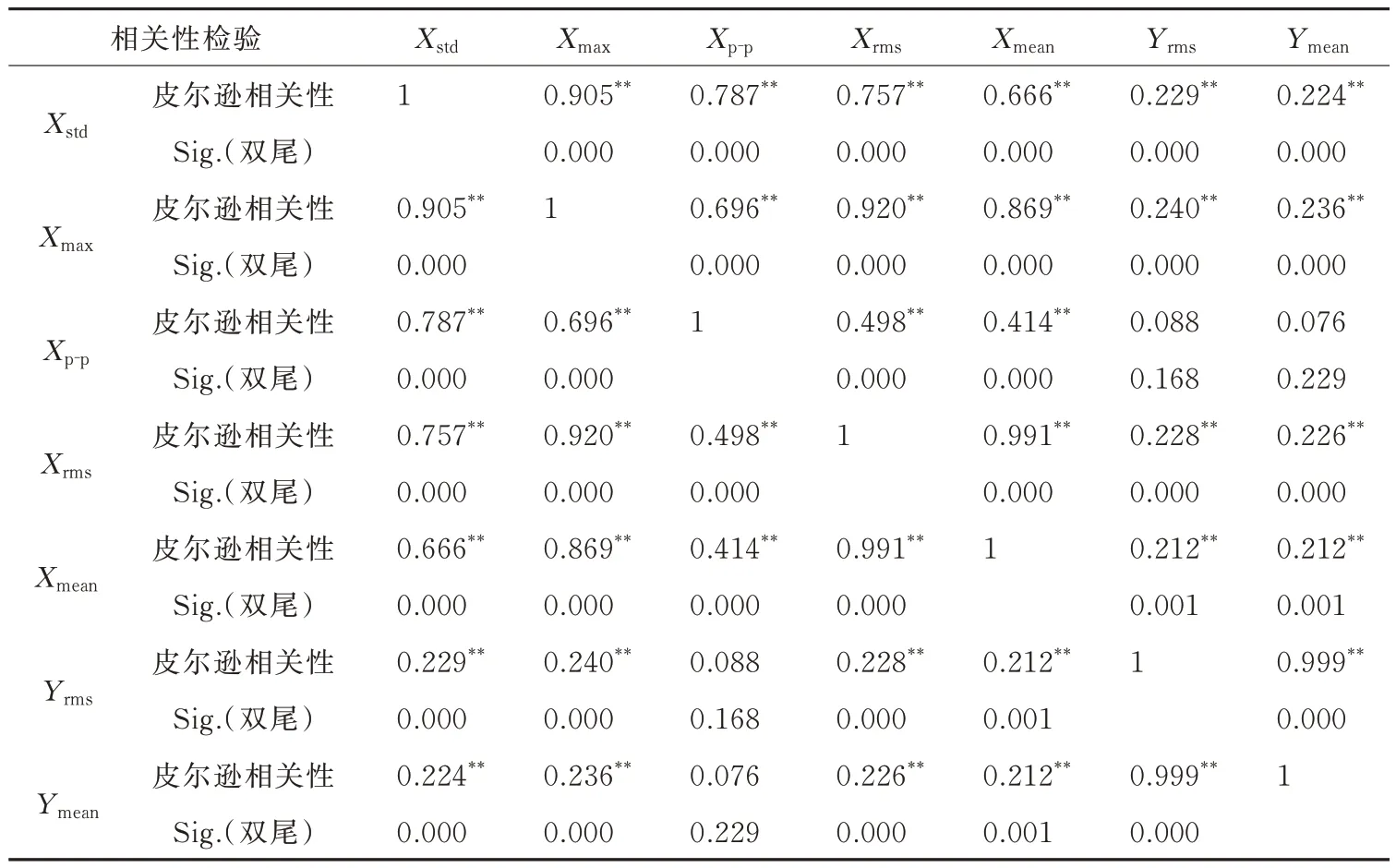
表3 指标间的相关性检验
从表3 可以看出:不仅同一轴向的指标高度相关,而且不同轴向的指标间也存在一定的相关性。当变量间有一定相关关系时,会对评价模型造成信息重叠的影响,若直接将其纳入分析可能会出现多重共线性的情况,影响最终评价结果。如果只从中选取几个指标进行分析,又可能会造成重要数据信息的丢失和不完整,导致模型的泛化性能降低。针对这种情况,该文通过主成分分析法(PCA)对初选指标进行降维处理,确定最终的评价指标,以提高模型精度和泛化能力。
3.2 基于主成分分析的指标提取
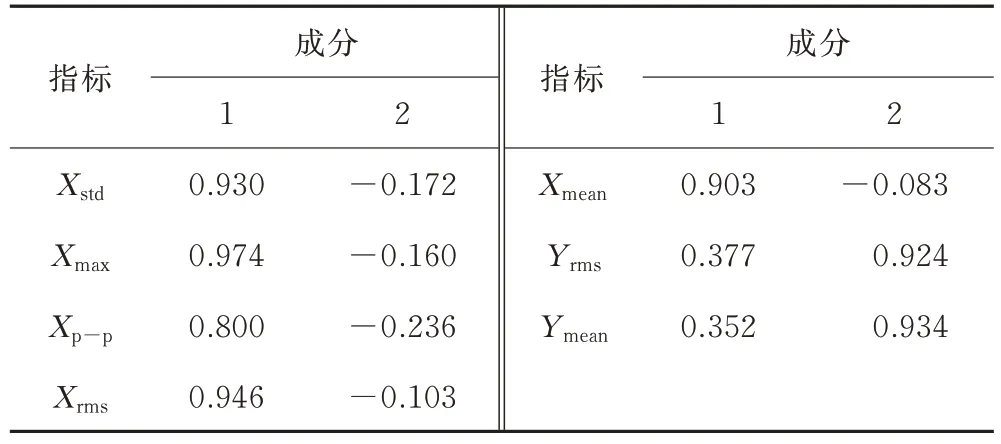
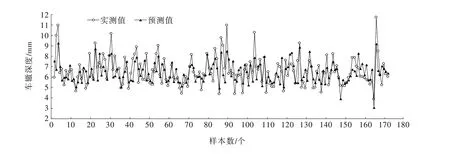
主成分分析是一种通过降维技术把多个变量化为少数几个主成分(综合变量)的统计分析方法,是最重要的特征提取方法之一。将一组存在相关性的n个变量通过正交变换转化为一组不相关的m(m 通过SPSS 软件对上述7 个指标进行主成分分析。首先进行KOM 检验和Bartlett 球形度检验,以确保指标间具有结构效度[17]。KMO 检验KKMO主要用于检查指标间的偏相关性,取值范围为0~1,取值越大,表明指标进行主成分分析的效果越好;而实际应用时,则至少要求KKMO值大于0.5 才适合进行主成分分析。Bartlett 球形度检验主要用于检验数据的分布以及各个指标间的独立情况,当显著性水平小于0.05 时,拒绝各变量独立的原假设,则说明可以进行主成分分析。KOM 检验和Bartlett 球形度检验的结果 如 表4 所 示,表4 中KKOM值 为0.655>0.5,同 时Bartlett 检验的显著性为0.00<0.05,综合两种检验结果,说明指标适合进行主成分分析。 表4 KOM 和Bartlett 球形度检验 主成分的方差贡献率是衡量其对原始数据的信息保存程度的指标。表5 为主成分(第1 列)、对应的特征值(第2 列)、对应的方差贡献率(第3 列)和累积方差贡献率(第4 列),当特征值大于1 时,该成分可以被认为是主成分。从表5 可看出:前两个成分的特征值大于1,且累积方差贡献率为89.8%,已经能够反映原始数据的大部分信息,故提取前两个主成分进行下一步的模型建立。根据主成分荷载矩阵(表6)及表5 中各主成分对应的特征值可以得到主成分的表达式如下: 表5 总方差解释 表6 主成分荷载矩阵 式中:F1为第1 主成分;F2为第2 主成分;为Xstd正态标准化后的值,其他类推。 人工神经网络(Artificial Neural Network)是一种模拟人脑的神经网络以期能够实现类人工智能的机器学习技术。近些年来,人工神经网络在模式识别、自动控制、信号处理、辅助决策等多方面起到了十分显著的作用。神经网络的研究与应用之所以能够不断地发展,与其强大的函数拟合能力是分不开的。神经网络在数据处理中具有自主学习功能以及寻找优化解的能力,因此相比以往的回归处理方式,使用神经网络实现回归要简单和准确得多。 采用卷积神经网络建立车辙评价模型,卷积神经网络是深度神经网络结构中最经典的一种,属于前馈神经网络[18],它能够从数据中高效地获取有用的特征描述。目前卷积神经网络已广泛应用于语音识别、图像识别及分类、自然语言处理等领域[19]。该文基于卷积神经网络的车辙评价模型构建过程如下: (1)输入特征数据 将采集到的振动加速度经上述方法处理计算得到F1和F2。第2.2 节证明了相同的道路,速度越大,产生的振动越大,故将F1、F2和速度作为输入,车辙深度作为输出。由于输入的振动特征F1和F2与速度存在不同的单位量纲,为消除各指标间的差异性,采用Z-score 标准化方法对数据进行处理,有助于提高模型精度,计算公式如式(3)所示。该研究共获取570 组样本数据,随机抽取70%作为训练集,30%作为测试集。 式中:x、X分别为原始数据标准化前、后值;μ、σ分别为原始数据的均值和标准差。 (2)确定模型结构 该文选取的模型结构主要由4 层CNN 层+1 层flatten 层+2 层 全 连 接 层 组 成。其 中,4 层CNN 层 的卷积核个数依次为16、32、64、128 个,卷积核大小均为3,激活函数均设置为ReLU,以便有更好的梯度性、训练更快。添加的一个flatten 层是使卷积层中的二维向量转化为一维。接着后面是2 层全连接层,第1 层全连接层的神经元个数为32 个,激活函数是ReLU,第2 层神经元个数为1 个,激活函数是线性激活函数。优化器选择自适应优化器Adam,最佳学习率确定为0.0004,损失函数采用的是均方误差,其中Xi为车辙深度实测值;为车辙深度估测值,训练次数n为1 500 次。 为衡量卷积神经网络模型的车辙估测值与实测值之间的偏差,选取平均绝对误差EMAE和平均相对误差EMRE作为评价模型精度的指标,计算公式如下: 经测试集检验,模型估测结果及其误差如图4、5所示。从图4、5 可以看出:整体上估测值与实测值较为接近,大多数绝对误差在1.5 mm 以下,计算其平均绝对误差为1.03 mm,平均相对误差为16.4%,说明该文方法具有较高的精度。 图4 卷积神经网络模型估测结果对比 图5 卷积神经网络模型估测误差 以上数据说明利用行车振动加速度来评价路面车辙具有一定的可靠性和可行性。但也应看到,有些评价结果的误差较大,高达2.5 mm,可能与建立模型的数据量、试验流程等有一定的关系。今后尚需扩大数据量,标准化试验流程,以期进一步提高模型的精度。 (1)利用自主开发的智能手机APP 采集行车数据,利用卡尔曼滤波技术去除行车振动数据中的噪声,通过分析不同工况下的振动特征,发现不同工况(不同车辆、不同速度)下行车振动加速度的变化趋势具有高度相似性,说明利用行车振动加速度评价路面性能具有普适性和可行性。 (2)通过分析路面车辙与行车振动加速度的相关性,从振动加速度数据的18 个时域指标提取出前7 个作为初选指标集。结果表明:车辙主要影响X方向的振动加速度。采用主成分分析法将7 个指标降维成两个独立的主成分,降低了冗余指标对评价模型的干扰。 (3)将两个主成分和速度作为评价指标,建立了基于卷积神经网络的车辙评价模型,模型的平均绝对误差为1.03 mm,平均相对误差为16.4%,说明该文方法可对路面车辙进行较为准确的评价。 (4)该文方法与目前的自动化检测相比,精度上虽有一定差距,但为路面车辙的在线监测提供了一种可能的方法,也可为道路养护管理部门提供更多辅助信息。今后,应考虑增加更多的车辆类型、道路类型开展相关研究,以进一步验证该方法的普适性,并提高精度。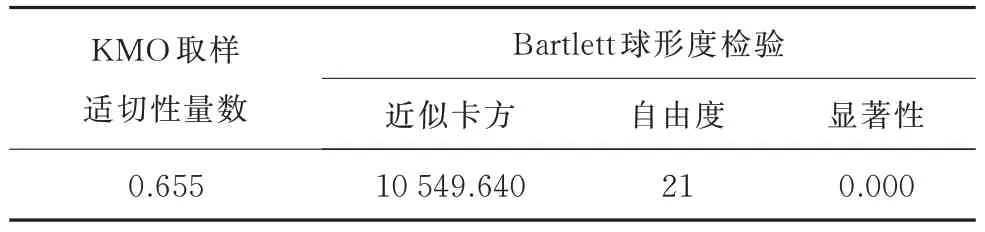

4 车辙评价模型
4.1 卷积神经网络模型构建
4.2 评价结果分析

5 结论
猜你喜欢
当代水产(2022年6期)2022-06-29
趣味(作文与阅读)(2021年9期)2022-01-19
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
上海公路(2018年1期)2018-06-26
北方交通(2016年12期)2017-01-15
汽车与安全(2016年5期)2016-12-01
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28